
EARS: ELECTROMYOGRAPHICAL AUTOMATIC RECOGNITION
OF SPEECH
Szu-Chen Stan Jou and Tanja Schultz
International Center for Advanced Communication Technologies
Carnegie Mellon University, Pittsburgh, PA, USA
Karlsruhe University, Karlsruhe, Germany
Keywords:
Electromyography, Speech Recognition, Articulatory Feature, Feature Extraction.
Abstract:
In this paper, we present our research on automatic speech recognition of surface electromyographic signals
that are generated by the human articulatory muscles. With parallel recorded audible speech and electromyo-
graphic signals, experiments are conducted to show the anticipatory behavior of electromyographic signals
with respect to speech signals. Additionally, we demonstrate how to develop phone-based speech recogniz-
ers with carefully designed electromyographic feature extraction methods. We show that articulatory feature
(AF) classifiers can also benefit from the novel feature, which improve the F-score of the AF classifiers from
0.467 to 0.686. With a stream architecture, the AF classifiers are then integrated into the decoding framework.
Overall, the word error rate improves from 86.8% to 29.9% on a 100 word vocabulary recognition task.
1 INTRODUCTION
As computer technologies advance, computers have
become an integral part of modern daily lives and our
expectations for a user-friendly interface grow every-
day. Automatic speech recognition (ASR) is one of
the most efficient front-end for human-computer in-
terface because it is natural for humans to commu-
nicate through speech. ASR is an automatic com-
puterized speech-to-text process which converts hu-
man speech signals into written words. It has vari-
ous applications, such as voice command and control,
dictation, dialog systems, audio indexing, speech-to-
speech translation, etc. However, these ASR applica-
tions usually do not work well in noisy environments.
Besides, they usually require the user to speak aloud,
which may be disturbing to bystanders and brings up
concern of privacy loss. In this paper, we describe our
research of integrating signals based on electromyog-
raphy with traditional acoustic speech signals for the
purpose of speech recognition.
The input speech signal of the traditional ASR
process is usually recorded with a microphone, e.g., a
close-talking headset or a telephone. However, from
the ASR point of view, microphone recordings of-
ten suffer from ambient noise or in other words the
noise robustness issue, because microphones pick up
vibration from the air-transmitted channel; therefore,
while picking up air vibration generated by human
voices, microphones also pick up air-transmitted am-
bient noises. In most cases, ambient noise deterio-
rates the ASR performance and the decrease in perfor-
mance depends on how badly the original voice signal
has been corrupted by noise. Besides the noise ro-
bustness issue, microphone-based ASR often has ap-
plicability issues, by which we mean that it is often
suboptimal to use microphones as the input device of
speech applications in certain situation. For exam-
ple, in an on-line shopping system, it is often required
to input confidential information such as credit card
numbers, which may be overheard if the user speak
aloud via the air-transmitted channels. Usually this
kind of overhearing results in confidentiality or pri-
vacy infringement. Besides, another issue of applica-
bility is that speaking aloud usually annoys other peo-
ple. Just imagine how annoying it would be if your
officemate spends all day dictating to the computer to
write a report, let alone many people dictate simulta-
neously.
In order to resolve the noise robustness and the ap-
plicability issues, we have applied electromyographic
(EMG) method to our speech recognition research.
The motivation is that the EMG method is inherently
robust to ambient noise and it enables silent speech
recognition to avoid disturbance and confidentiality
issues. The EMG method measures muscular electric
potential with a set of electrodes attached to the skin
where the articulatory muscles underlie. In the physi-
3
Stan Jou S. and Schultz T. (2008).
EARS: ELECTROMYOGRAPHICAL AUTOMATIC RECOGNITION OF SPEECH.
In Proceedings of the First International Conference on Bio-inspired Systems and Signal Processing, pages 3-12
DOI: 10.5220/0001067100030012
Copyright
c
SciTePress

ological speech production process, as we speak, neu-
ral control signals are transmitted to articulatory mus-
cles, and the articulatory muscles contract and relax
accordingly to produce voice. The muscle activity
alters the electric potential along the muscle fibers,
and the EMG method can measure this kind of po-
tential change. In other words, the articulatory mus-
cle activities result in electric potential change, which
can be picked up by EMG electrodes for further sig-
nal processing, e.g., speech recognition. The EMG
method is inherently robust to ambient noise because
the EMG electrodes contact to the human tissue di-
rectly without the air-transmission channel. In ad-
dition, the EMG method has better applicability be-
cause the EMG method makes it possible to recognize
silent speech, which means mouthing words without
making any sound.
For silent speech recognition with EMG, Man-
abe et al. first showed that it is possible to recog-
nize five Japanese vowels and ten Japanese isolated
digits using surface EMG signals recorded with elec-
trodes pressed on the facial skin (Manabe et al., 2003;
Manabe and Zhang, 2004). EMG has been a use-
ful analytic tool in speech research since the 1960’s
(Fromkin and Ladefoged, 1966), and the recent appli-
cation of surface EMG signals to automatic speech
recognition was proposed by Chan et al. They fo-
cused on recognizing voice command from jet pi-
lots under noisy environment, so they showed digit
recognition in normal audible speech (Chan et al.,
2002). Jorgensen et al. proposed sub auditory speech
recognition using two pairs of EMG electrodes at-
tached to the throat. Sub vocal isolated word recogni-
tion was demonstrated with various feature extraction
and classification methods (Jorgensen et al., 2003;
Jorgensen and Binsted, 2005; Betts and Jorgensen,
2006). Maier-Hein et al. reported non-audible EMG
speech recognition focusing on speaker and session
independency issues. (Maier-Hein et al., 2005).
However, these pioneering studies are limited to
small vocabulary ranging from five to around forty
isolated words. The main reason of this limitation is
that the classification unit is restrained to a whole ut-
terance, instead of a phone as a smaller and more flex-
ible unit. As a standard practice of large vocabulary
continuous speech recognition (LVCSR), the phone
is a natural unit based on linguistic knowledge. From
the pattern recognition’s point of view, the phone as
a smaller unit is preferred over a whole utterance be-
cause phones get more training data per classification
unit for more reliable statistical inference. The phone
unit is also more flexible in order to constitute any
pronunciation combination of words as theoretically
unlimited vocabulary for speech recognition. With
the phone unit relaxation, EMG speech recognition
can be treated as a standard LVCSR task and we can
apply any advanced LVCSR algorithms to improve
the EMG speech recognizer.
In this paper, we introduce such an EMG speech
recognition system with the following research as-
pects. Firstly, we analyze the phone-based EMG
speech recognition system with articulatory features
and their relationship with signals of different EMG
channels. Next, we demonstrate the challenges of
EMG signal processing with the aspect of feature
extraction for the speech recognition system. We
then describe our novel EMG feature extraction meth-
ods which makes the phone-based system possible.
Lastly, we integrate the novel EMG feature extrac-
tion methods and the articulatory feature classifiers
into the phone-based EMG speech recognition sys-
tem with a stream architecture. Notice that the ex-
periments described in this paper are conducted on
normal audible speech, not silent mouthing speech.
2 RESEARCH APPROACH
2.1 Data Acquisition
In this paper, we report results of data collected from
one male speaker in one recording session, which
means the EMG electrode positions were stable and
consistent during this whole session. In a quiet room,
the speaker read English sentences in normal audi-
ble speech, which was simultaneously recorded with
a parallel setup of an EMG recorder and a USB
soundcard with a standard close-talking microphone
attached to it. When the speaker pressed the push-
to-record button, the recording software started to
record both EMG and speech channels and generated
a marker signal fed into both the EMG recorder and
the USB soundcard. The marker signal was then used
for synchronizing the EMG and the speech signals.
The speaker read 10 times of a set of 38 phonetically-
balanced sentences and 10 times of 12 sentences from
news articles. The 380 phonetically-balanced utter-
ances were used for training and the 120 news article
utterances were used for testing. The total duration
of the training and test set are 45.9 and 10.6 minutes,
respectively. We also recorded ten special silence ut-
terances, each of which is about five seconds long
on average. The format of the speech recordings is
16 kHz sampling rate, two bytes per sample, and lin-
ear PCM, while the EMG recording format is 600 Hz
sampling rate, two bytes per sample, and linear PCM.
The speech was recorded with a Sennheiser HMD 410
close-talking headset.
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
4

Figure 1: EMG positioning.
The EMG signals were recorded with six pairs of
Ag/Ag-Cl surface electrodes attached to the skin, as
shown in Fig. 1. Additionally, a common ground ref-
erence for the EMG signals is connected via a self-
adhesive button electrode placed on the left wrist.
The six electrode pairs are positioned in order to pick
up the signals of corresponding articulatory muscles:
the levator angulis oris (EMG2,3), the zygomaticus
major (EMG2,3), the platysma (EMG4), the orbic-
ularis oris (EMG5), the anterior belly of the digas-
tric (EMG1), and the tongue (EMG1,6) (Chan et al.,
2002; Maier-Hein et al., 2005). Two of these six chan-
nels (EMG2,6) are positioned with a classical bipo-
lar configuration, where a 2cm center-to-center inter-
electrode spacing is applied. For the other four chan-
nels, one of the electrodes is placed directly on the
articulatory muscles while the other electrode is used
as a reference attached to either the nose (EMG1) or
to both ears (EMG 3,4,5).
In order to reduce the impedance at the electrode-
skin junctions, a small amount of electrode gel was
applied to each electrode. All the electrode pairs were
connected to the EMG recorder (Becker, 2005), in
which each of the detection electrode pairs pick up
the EMG signal and the ground electrode provides a
common reference. EMG responses were differen-
tially amplified, filtered by a 300 Hz low-pass and a
1Hz high-pass filter and sampled at 600 Hz. In or-
der to avoid loss of relevant information contained
in the signals we did not apply a 50 Hz notch filter
which can be used for the removal of line interference.
Also note that all care was taken such that wearing the
close-talking headset does not interfere with the EMG
electrode attachment.
2.2 EMG-based Speech Recognition
We used the following approach to bootstrap the
phone-based EMG speech recognizer. First of all, the
forced alignment of the audible speech data is gen-
erated with a Broadcast News (BN) speech recog-
nizer (Yu and Waibel, 2000), which is trained with
the Janus Recognition Toolkit (JRTk). Since we have
parallel recorded audible and EMG speech data, the
forced-aligned labels of the audible speech were used
to bootstrap the EMG speech recognizer. Since the
training set is very small, we only trained context-
independent acoustic models. The trained acoustic
model was used together with a trigram BN language
model for decoding. Because the problem of large
vocabulary continuous speech recognition is still very
difficult for state-of-the-art EMG speech processing,
we restricted the decoding vocabulary to the words
appearing in the test set in this study. This approach
allows us to better demonstrate the performance dif-
ferences introduced by different feature extraction
methods. To cover all the test sentences, the decod-
ing vocabulary contains 108 words in total. Note
that the training vocabulary contains 415 words, 35
of which also exist in the decoding vocabulary. Also
note that the test sentences were not applied for lan-
guage model training.
2.3 Articulatory Feature Classifier and
Stream Architecture
Compared to widely-used cepstral features for au-
tomatic speech recognition, articulatory features are
expected to be more robust because they represent
articulatory movements, which are less affected by
speech signal variation or noise. Instead of measur-
ing the AFs directly, we derive them from phones as
described in (Metze and Waibel, 2002). More pre-
cisely, we use the IPA phonological features for AF
derivation. In this work, we use AFs that have binary
values. For example, each of the positions of the dor-
sum, namely FRONT, CENTRAL and BACK is an
AF that has a value either present or absent. To clas-
sify the AF as present or absent, the likelihood scores
of the corresponding present model and absent model
are compared. Also, the models take into account a
prior value based on the frequency of features in the
training data.
The training of AF classifiers is done on middle
frames of the phones only, because they are more
stable than the beginning or ending frames. Identi-
cal to the training of EMG speech recognizer, the AF
classifiers are also trained solely on the EMG signals
without speech acoustics. There are 29 AF classifiers,
each of which is a Gaussian Mixture Model (GMM)
containing 60 Gaussians. To test the performance, the
AF classifiers are applied and generate frame-based
hypotheses.
The idea behind the stream architecture with AF
classifiers is that the AF streams are expected to pro-
vide additional robust phonological information to the
EARS: ELECTROMYOGRAPHICAL AUTOMATIC RECOGNITION OF SPEECH
5

phone-based hidden Markov model (HMM) speech
recognizer. The stream architecture employs a list of
parallel feature streams, each of which contains one of
the acoustic or articulatory features. Information from
all streams are combined with a weighting scheme to
generate the EMG acoustic model scores for decoding
(Metze and Waibel, 2002).
2.4 Feature Extraction
2.4.1 Traditional Spectral Feature
The recorded EMG signal is transformed into 18-
dimensional feature vectors, with 54-ms observation
window and 10-ms frame-shift for each channel.
For each channel, hamming-windowed Short
Time Fourier Transform is computed, and then its
delta coefficients serve as the first 17 coefficients of
the final feature. The 18th coefficient consists of the
mean of the time domain values in the given observa-
tion window (Maier-Hein et al., 2005). In the follow-
ing experiments, features of one or more channels can
be applied. If more than one channel are used for clas-
sification, the features of the corresponding channels
are concatenated to form the final feature vector.
2.4.2 Special EMG Feature
Since the EMG signal is very different from the
speech signal, it is necessary to explore feature ex-
traction methods that are suitable for EMG speech
recognition. Here we describe the signal preprocess-
ing steps and feature extraction methods we designed
for EMG signals.
As noted above, the EMG signals vary across dif-
ferent sessions. Nonetheless, the DC offsets of the
EMG signals vary, too. In the attempt to make the
DC offset zero, we estimate the DC offset from the
special silence utterances on a per session basis, then
all the EMG signals are preprocessed to subtract this
session-based DC offset. Although we only discuss
a single session of a single speaker in this paper, we
expect this DC offset preprocessing step makes the
EMG signals more stable.
To describe the features designed for EMG sig-
nals, we denote the EMG signal with normalized
DC as x[n] and its short-time Fourier spectrum as X.
We also denote the nine-point double-averaged signal
w[n], high frequency signal p[n], and the correspond-
ing rectified signal r[n].
We then define the time-domain mean features
¯
x,
¯
w, and
¯
r of the signals x[n],w[n], and r[n], respec-
tively. Besides, we use the power features P
w
and P
r
and we define z as the frame-based zero-crossing rate
of p[n].
To better model the context, we use the fol-
lowing contextual filters, which can be applied
on any feature to generate a new one. The
delta filter: D(f
j
) = f
j
− f
j−1
. The trend filter:
T (f
j
,k) = f
j+k
− f
j−k
. The stacking filter: S(f
j
,k) =
[f
j−k
,f
j−k+1
,...,f
j+k−1
,f
j+k
], where j is the frame in-
dex and k is the context width. Note that we always
apply linear discriminant analysis (LDA) on the final
feature in order to reduce the dimensionality to 32.
3 EXPERIMENTS AND
ANALYSES
The performance metrics used in this paper are F-
score and word error rate (WER). F-score (α = 0.5)
is reported for the AF performances and WER is re-
ported for the speech recognition performances
1
.
3.1 Articulatory Feature Analysis
3.1.1 Baseline System
First of all, we forced-aligned the speech data us-
ing the aforementioned BN system. In the baseline
system, this time-alignment was used for both the
speech and the EMG signals. Because we have a
marker channel in each signal, the marker signal is
used to offset the two signals to get accurate time-
synchronization. Then the aforementioned AF train-
ing and testing procedures were applied both on the
speech and the six-channel concatenated EMG sig-
nals. The averaged F-scores of all 29 AFs are 0.814
for the speech signal and 0.467 for the EMG sig-
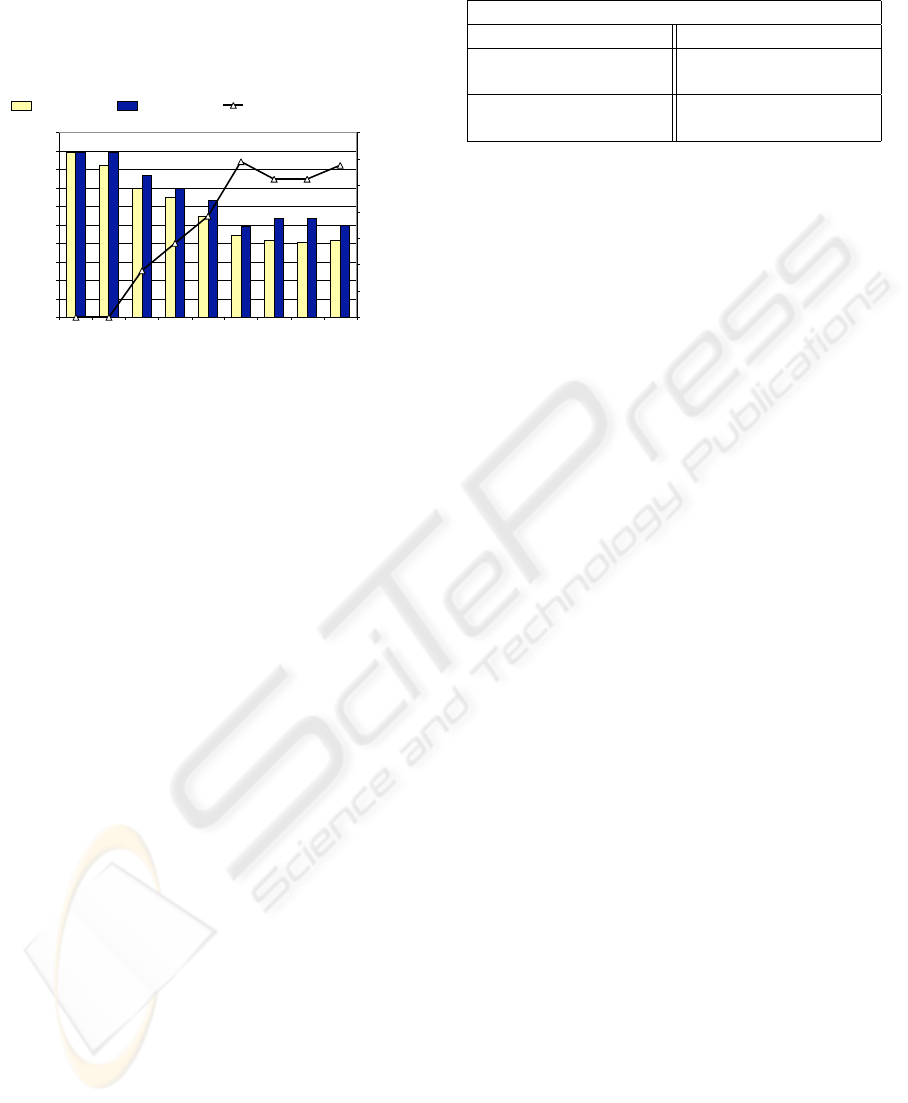
nal. Fig. 2 shows individual AF performances for the
speech and EMG signals along with the amount of
training data. We can see that the amount of training
data (given in frames of 10 ms) has an impact on the
EMG AF performance.
3.1.2 Channel Synchronization
It is observed that human articulator movements are
anticipatory to the speech signal as speech signal is
a product of articulator movements and source ex-
citation (Chan et al., 2002). This means the time
alignment we used for bootstrapping our EMG-based
1
With α = 0.5, F-score = 2PR/(P+R), where precision
P = C
t p
/(C
t p
+C
f p
), recall R = C
t p
/(C
t p
+C
f n
), C
t p
= true
positive count, C
f p
= false positive count, C
f n
= false neg-
ative count.
WER =
S+D+I
N
, where S = word substitution count, D =
word deletion count, I = word insertion count, N = number
of reference words.
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
6
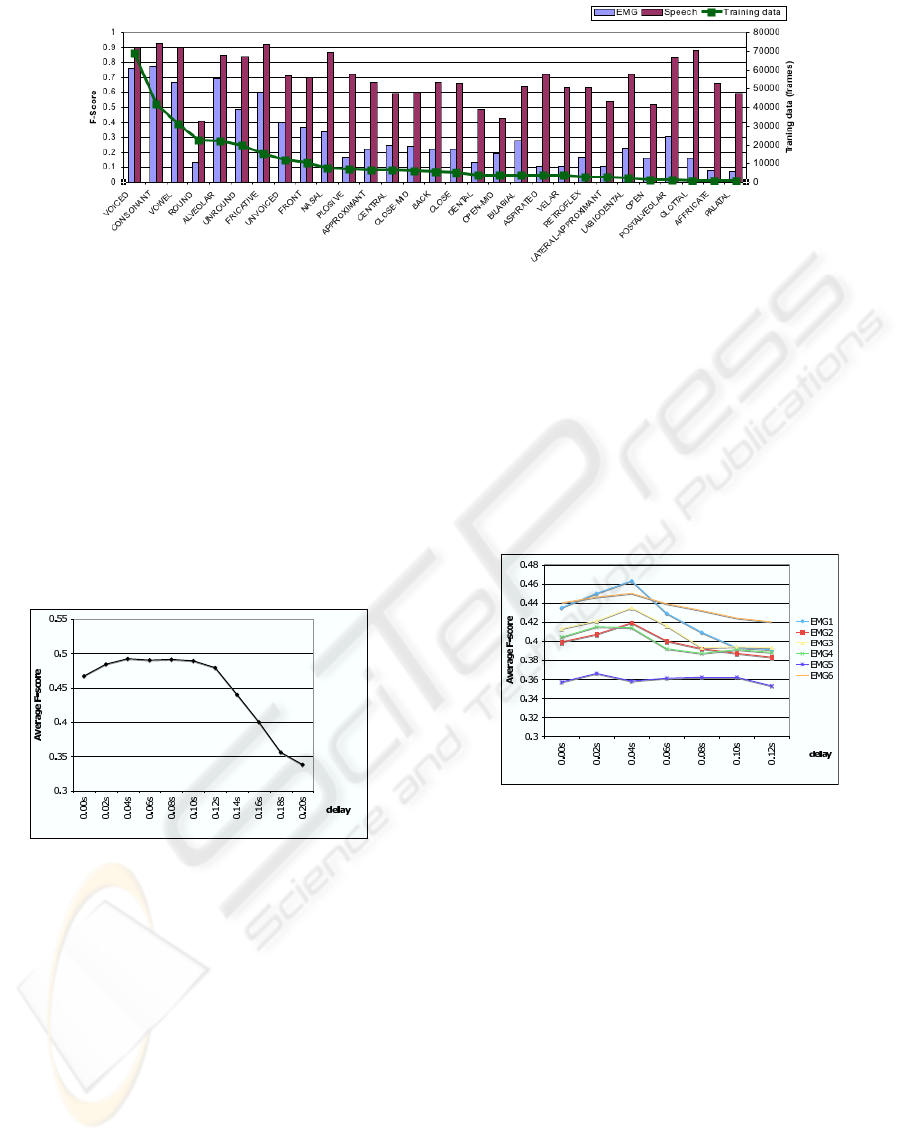
Figure 2: Baseline F-scores of the EMG and speech signals vs. the amount of training data.
system is actually mis-aligned for the EMG signals,
because the speech and the EMG signals are inher-
ently asynchronous in time. Based on this, we de-
layed the EMG signal with various duration to the
forced-alignment labels of speech signal, and con-
ducted the training and testing experiments respec-
tively. As shown in Fig. 3, the initial time-alignment
does not have the best F-score, while the best F-scores
come with time delays around 0.02 second to 0.12
second. This result suggests that a time-delayed ef-
fect exists between the speech and the EMG signals.
Figure 3: F-scores of concatenated six-channel EMG sig-
nals with various time delays (a delay of 0.1 means that the
EMG signal is delayed to the acoustic signal by 0.1 sec-
onds).
3.1.3 Articulator-Dependent Synchronization
To explore the time-delayed effect of EMG signals,
we conducted the same experiments on the level of
single EMG channels, instead of previously concate-
nated six-channels. The rationale is that articulators’
behaviors are different from each other, so the re-
sulted time delays are different on the corresponding
EMG signals. The effect of different time delays can
be seen in Fig. 4. We observed that some EMG sig-
nals are more sensitive to time delay than others, e.g.
EMG1 vs. EMG6, where EMG6 is more consistent
with different time delays. The delays to achieve peak
performance vary for each channel and the variation
is within the range of 0.02 to 0.10 seconds. To fur-
ther show the time-delay effect, we also conducted an
experiment which is identical to the baseline, except
each channel is offset with its known best time de-
lay. This approach gave a better F-score of 0.502 than
the baseline’s 0.467. It also outperforms the uniform
delay of 0.04 second which gave 0.492.
Figure 4: F-scores of single-channel EMG signals with var-
ious time delays with respect to the speech signals.
3.1.4 Complementary EMG Pairs
As suggested in (Maier-Hein et al., 2005), concate-
nated multi-channel EMG features usually work bet-
ter than single-channel EMG features. Therefore,
based on aforementioned time-delayed results, we
conducted experiments on EMG-pairs in which each
EMG signal is adjusted with its best single-channel
time offset. The first row of values in Table 1 shows
the F-scores of single-channel baseline (i.e. without
any time delay) and the second row shows those with
the best single-channel time delay, while the rest of
the values are F-scores of EMG pairs. The F-scores
suggest that some EMG signals are complementary to
each other, e.g. EMG1-3 and EMG2-6, which pairs
perform better than both their single channels do.
EARS: ELECTROMYOGRAPHICAL AUTOMATIC RECOGNITION OF SPEECH
7
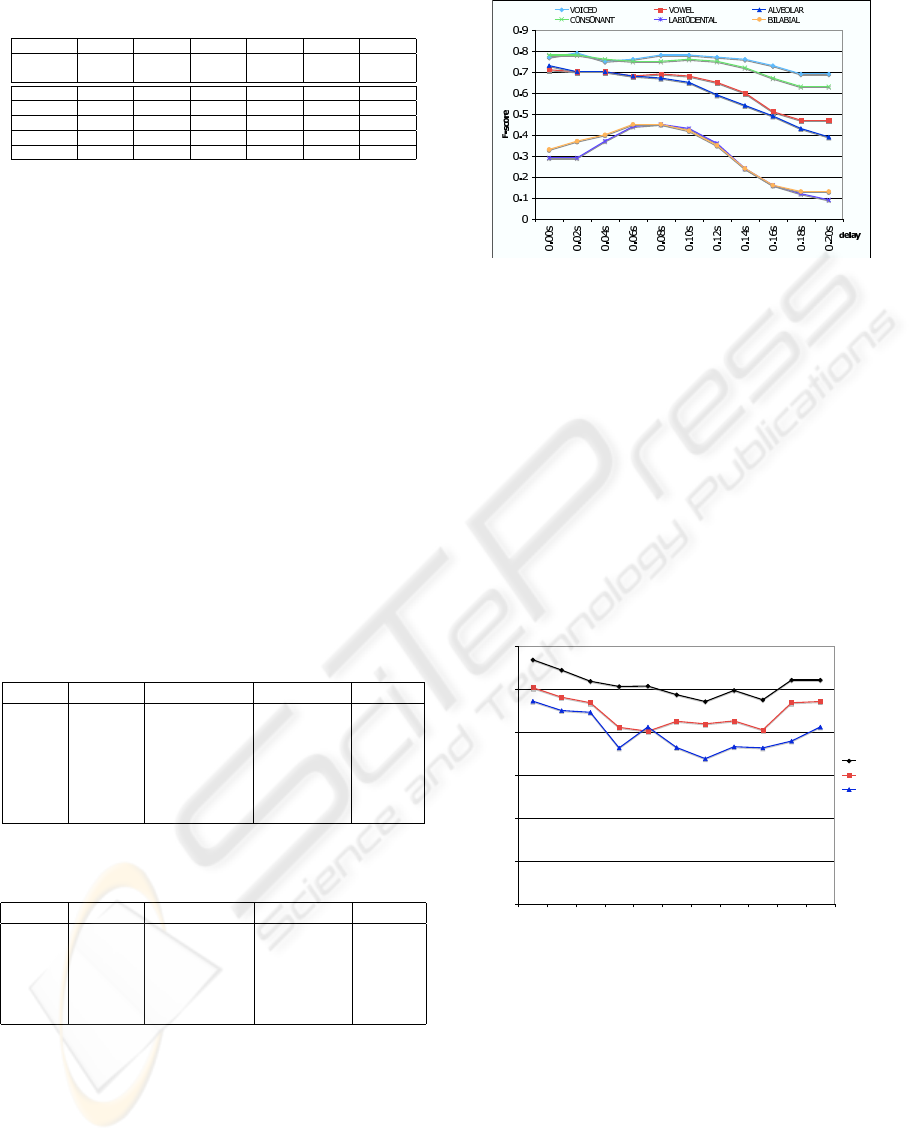
Table 1: F-Score of EMG and EMG Pairs.
F-Scores EMG1 EMG2 EMG3 EMG4 EMG5 EMG6
single 0.435 0.399 0.413 0.404 0.357 0.440
+delay 0.463 0.419 0.435 0.415 0.366 0.450
EMG1 0.439 0.465 0.443 0.417 0.458
EMG2 0.440 0.443 0.414 0.464
EMG3 0.421 0.414 0.449
EMG4 0.400 0.433
EMG5 0.399
3.1.5 Performance of Individual Articulators
In Table 2 and 3, we list the top-4 articulators that
have the best F-scores. For single channels, EMG1
performs the best across these top-perfomance artic-
ulators, while EMG1-3, EMG1-6, and EMG2-6 are
the better paired channels. Interestingly, even though
EMG5 performs the worst as a single channel clas-
sifier, EMG5 can be complemented with EMG2 to
form a better pair for VOWEL. In Fig. 5, we show
six AFs that represent different characteristics of per-
formance changes with different delays. For example,
VOICED’s F-scores are rather stable with various de-
lay values while BILABIAL is rather sensitive. How-
ever, we do not have conclusive explanation on the
relation between the AFs and the delays. Further ex-
ploration shall be conducted.
Table 2: Best F-Scores of Single EMG channels w.r.t. AF.
AFs VOICED CONSONANT ALVEOLAR VOWEL
1 0.80 2 0.73 1 0.65 1 0.59
Sorted 6 0.79 3 0.72 3 0.61 2 0.59
F-score 3 0.76 1 0.71 2 0.59 6 0.56
4 0.75 6 0.71 6 0.56 3 0.52
2 0.74 4 0.69 4 0.55 4 0.51
5 0.74 5 0.63 5 0.45 5 0.51
Table 3: Best F-Scores of Paired EMG Channels w.r.t. AF
AFs VOICED CONSONANT ALVEOLAR VOWEL
1-6 0.77 1-6 0.76 1-3 0.69 2-6 0.64
Sorted 1-3 0.76 2-3 0.75 1-6 0.67 2-4 0.62
F-Score 1-2 0.76 3-6 0.74 1-2 0.66 2-5 0.62
2-6 0.75 2-4 0.74 2-6 0.66 1-6 0.62
3-6 0.75 2-6 0.74 2-3 0.65 1-3 0.61
3.2 Feature Extraction Experiments
In the following experiments, the final EMG features
are generated by stacking single-channel EMG fea-
tures of channels 1, 2, 3, 4, 6. We do not use chan-
nel 5 because it is relatively noisy for this experiment.
The final LDA dimensions are reduced to 32 for all
the experiments.
Figure 5: Performances of six representative AFs.
3.2.1 EMG ASR using Spectral Features
It was reported that the spectral coefficients are better
than cepstral and LPC coefficients on EMG speech
recognition (Maier-Hein et al., 2005). Therefore, we
use the spectral features as baseline in this paper. As
their WER is shown in Fig. 6, the spectral features are
S0 = X, SD = [X,D(X)], and SS = S(X, 1). We can
see that the contextual features improve WER. Addi-
tionally, adding time delays for modeling the antic-
ipatory effects also helps. This is consistent to the
articulatory feature analysis above.
30
40
50
60
70
80
90
0 10 20 30 40 50 60 70 80 90 100
Time Delay (millisecond)
Word Error Rate (%)
S0
SD
SS
Figure 6: Word Error Rate on Spectral Features.
3.2.2 EMG ASR Systems using
Spectral+temporal (ST) Features
Is was also reported that the time-domain mean fea-
ture provided additional gain to spectral features
(Maier-Hein et al., 2005). Here we also added the
time-domain mean feature, as their WER is shown in
Fig. 7: S0M = X
m
, SDM = [X
m
,D(X
m
)], SSM =
S(X
m
,1), and SSMR = S(X
mr
,1). where X
m
= [X,
¯
x]
and X
mr
= [X,
¯
x,
¯
r,z].
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
8
30
40
50
60
70
80
90
0 10 20 30 40 50 60 70 80 90 100
Time Delay (millisecond)
Word Error Rate (%)
S0M
SDM
SSM
SSMR
Figure 7: Word Error Rate on Spectral+Temporal Features.
3.2.3 EMG ASR Systems using EMG Features
We have observed that even though the spectral fea-
tures are among the better ones, they are still very
noisy for acoustic model training. Therefore we de-
signed the EMG features that are normalized and
smoothed in order to extract features from EMG sig-
nals in a more robust fashion. The performance of the
EMG features are shown in Fig. 8, where the EMG
features are
E0 = [f0,D(f0),D(D(f0)),T (f0, 3)],
where f0 = [
¯
w,P
w
]
E1 = [f1,D(f1),T (f1,3)],
where f1 = [
¯
w,P
w
,P
r
,z]
E2 = [f2,D(f2),T (f2,3)],
where f2 = [
¯
w,P
w
,P
r
,z,
¯
r]
E3 = S(E2,1)
E4 = S(f2,5)
The essence of the design of feature extraction meth-
ods is to reduce noise while keeping the useful in-
formation for classification. Since the EMG spectral
feature is noisy, we decide to first extract the time-
domain mean feature, which is empirically known to
be useful in literature. By adding power and con-
textual information to the time-domain mean, E0 is
generated and it already outperforms all the spectral-
only features. Since the mean and power only rep-
resent the low-frequency components, we add the
high-frequency power and the high-frequency zero-
crossing rate to form E1, which gives us another 10%
improvement. With one more feature of the high-
frequency mean, E2 is generated. E2 again improves
the WER. E1 and E2 show that the specific high-
frequency information can be helpful. E3 and E4
use different approaches to model the contextual in-
formation, and they show that large context provides
useful information for the LDA feature optimization
step. They also show that the features with large con-
text are more robust against the EMG anticipatory ef-
fect. We summarize by showing the performance of
all the presented feature extraction methods in Fig. 9,
in which all the feature extraction methods apply a
50-ms delay.
30
40
50
60
70
80
90
0 10 20 30 40 50 60 70 80 90 100
Time Delay (millisecond)
Word Error Rate (%)
E0
E1
E2
E3
E4
Figure 8: Word Error Rate on EMG Features.
0
10
20
30
40
50
60
70
80
90
100
S0
SD
SS
S0M
SDM
SSM
SSMR
E0
E1
E2
E3
E4
Feature Extraction Methods
Word Error Rate (%)
Spectral
Spectral+Temporal
EMG
Figure 9: WER of Feature Extraction Methods.
3.3 Integration of Special EMG Feature
and AF Classifiers
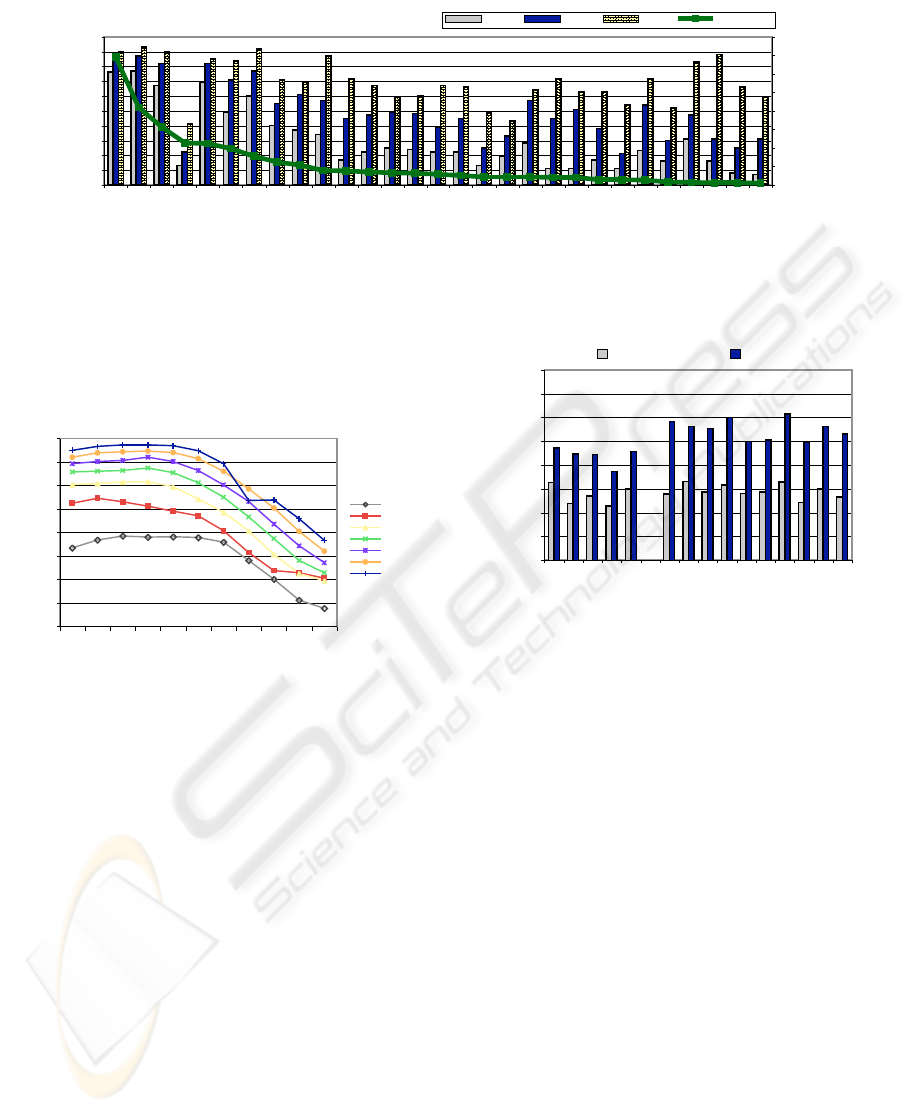
3.3.1 AF Classification with the E4 Feature
Identical to the aforementioned experiments, we
forced-aligned the speech data using the BN speech
recognizer. In the baseline system, this time-
alignment was used for both the speech and the
EMG signals. Because we have a marker channel
in each signal, the marker signal is used to offset
the two signals to get accurate time-synchronization.
Then the AF training and testing procedures were
applied both on the speech and the five-channel
concatenated EMG signals, with the ST and E4
features. The averaged F-scores of all 29 AFs are
0.492 for EMG-ST, 0.686 for EMG-E4, and 0.814
for the speech signal. Fig. 10 shows individual AF
performances for the speech and EMG signals along
with the amount of training data in frames. The E4
EARS: ELECTROMYOGRAPHICAL AUTOMATIC RECOGNITION OF SPEECH
9
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
VOICED
CONSONANT
VOWEL
ROUND
ALVEOLAR
UNROUND
FRICATIVE
UNVOICED
FRONT
NASAL
PLOSIVE
APPROXIMANT
CENTRAL
CLOSE-MID
BACK
CLOSE
DENTAL
OPEN-MID
BILABIAL
ASPIRATED
VELAR
RETROFLEX
LATERAL-APPROXIMANT
LABIODENTAL
OPEN
POSTALVEOLAR
GLOTTAL
AFFRICATE
PALATAL
F-Score
0
10000
20000
30000
40000
50000
60000
70000
80000
Traning data (frames)
EMG-ST EMG-E4 Speech Training data
Figure 10: F-scores of the EMG-ST, EMG-E4 and speech articulatory features vs. the amount of training data.
significantly outperforms ST in that the EMG-E4
feature performance is much closer to the speech
feature performance.
0.30
0.35
0.40
0.45
0.50
0.55
0.60
0.65
0.70
0.00s
0.02s
0.04s
0.06s
0.08s
0.10s
0.12s
0.14s
0.16s
0.18s
0.20s
delay
Average F-score
ST
E4-LDA1
E4-LDA3
E4-LDA5
E4-LDA7
E4-LDA9
E4-LDA11
Figure 11: F-scores of concatenated five-channel EMG-ST
and EMG-E4 articulatory features with various LDA frame
sizes on time delays for modeling anticipatory effect.
We also conducted the time-delay experiments as
done in previous ones to investigate the EMG vs.
speech anticipatory effect. Fig. 11 shows the F-scores
of E4 with various LDA frame sizes and delays. We
observe similar anticipatory effect of E4-LDA and ST
with time delay around 0.02 to 0.10 second. Com-
pared to the 90-dimension ST feature, E4-LDA1 has
a dimensionality of 25 while having a much higher F-
score. The figure also shows that a wider LDA context
width provides a higher F-score and is more robust for
modeling the anticipatory effect, because LDA is able
to pick up useful information from the wider context.
3.3.2 EMG Channel Pairs
In order to analyze E4 for individual EMG channels,
we trained the AF classifiers on single channels and
channel pairs. The F-scores are shown in Fig. 12. It
shows E4 outperforms ST in all configurations. More-
over, E4 on single-channel EMG 1, 2, 3, 6 are already
0.30
0.35
0.40
0.45
0.50
0.55
0.60
0.65
0.70
EMG1
EMG2
EMG3
EMG4
EMG6
EMG12
EMG13
EMG14
EMG16
EMG23
EMG24
EMG26
EMG34
EMG36
EMG46
EMG Position and Position Pair
Average F-Score
Feat-ST Feat-E4
Figure 12: F-scores of the EMG-ST and EMG-E4 AFs on
single EMG channel and paired EMG channels.
better than the all-channel ST’s best F-score 0.492.
For ST, the paired channel combination only provides
marginal improvements; in contrast, for E4, the fig-
ure shows significant improvements of paired chan-
nels compared to single channels. We believe this
significant improvements come from a better decor-
related feature space provided by E4.
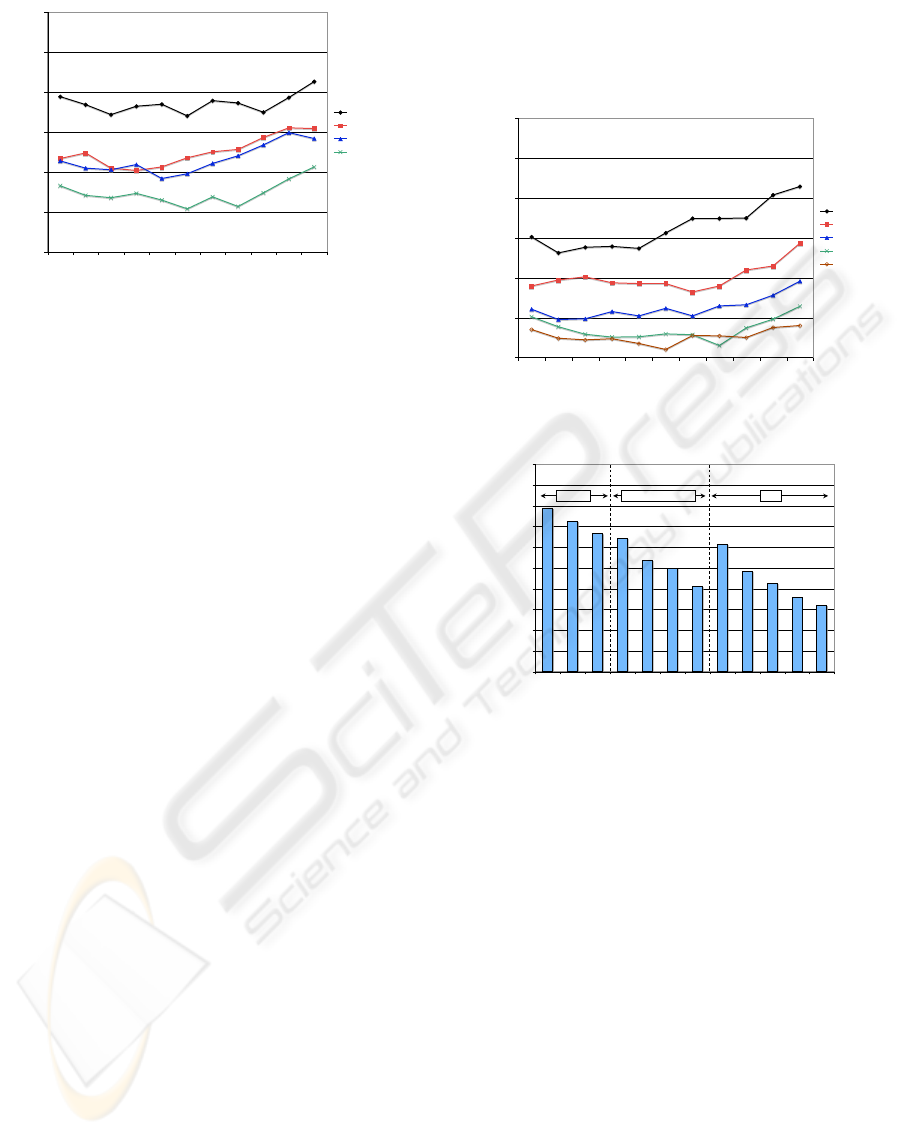
3.3.3 Decoding in the Stream Architecture
We then conducted a full decoding experiment with
the stream architecture. The test set was divided into
two equally-sized subsets, on which the following
procedure was done in two-fold cross-validation. On
the development subset, we incrementally added the
AF classifiers one by one into the decoder in a greedy
approach, i.e., the AF that helps to achieve the best
WER was kept in the streams for later experiments.
After the WER improvement was saturated, we fixed
the AF sequence and applied them on the test subset.
Fig. 13 shows the WER and its relative improvements
averaged on the two cross-validation turns. With five
AFs, the WER tops 11.8% relative improvement, but
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
10
there is no additional gain with more AFs.
Among the selected AFs, only four of them are
selected in both cross-validation turns. This inconsis-
tency suggests a further investigation of AF selection
is necessary for generalization.
25.00
26.00
27.00
28.00
29.00
30.00
31.00
32.00
33.00
34.00
35.00
No AF
VOICED / FRICATIVE
DENTAL / LABIODEN
POSTALV / BACK
UNROUND / VELAR
GLOTTAL / LATERAL-AP
BACK / CONSONANT
CENTRAL / UNROUND
CONSONANT / VOICED
Incrementally Added Articulatory Features
Word Error Rate (%)
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
Relative Improvement (%)
WER (Dev) WER (Test) Relative Improvement (Test)
Figure 13: Word error rates and relative improvements of
incrementally added EMG articulatory feature classifiers in
the stream architecture. The two AF sequences correspond
to the best AF-insertion on the development subsets in two-
fold cross-validation.
4 COLLECTING MORE DATA
We are making efforts on larger-scale data collection
of EMG speech. The targeted total number of speak-
ers is in dozens and the recording modalities include
acoustic speech, EMG, and video. Each speaker par-
ticipates in two recording sessions, each of which in-
cludes a part of normal audible speech recording and
a part of silent mouthing speech recording. In each
part, two sets of phonetically balanced sentences are
collected. One set is referred to as the general set and
it exists in every part of every speaker. The other set
is a speaker specific set, which is different for dif-
ferent speakers. Per part, the general set contains 10
sentences and the speaker specific set contains 40 sen-
tences.
The data collection process is designed to be as
unbiased as possible, e.g., to eliminate the fatigue fac-
tor. The two sessions are recorded one week apart.
Besides, the order of the silent part and the audible
part is reversed in the two sessions. In each recording
part, the two sentence sets are mixed together into a
set of 50 sentences and the sentences appear in ran-
dom order. Table 4 shows the data details per speaker.
With this larger EMG corpus, we expect to be able
to study the effects of speaker dependency, session de-
pendency, audible versus mouthing speech kinemat-
ics, just to name a few.
Table 4: Data per speaker.
Speaker
Session 1 Session 2
Part 1 audible speech Part 1 silent speech
rand(10+40 sentences) rand(10+40 sentences)
Part 2 silent speech Part 2 audible speech
rand(10+40 sentences) rand(10+40 sentences)
5 CONCLUSIONS
We have presented our recent advances on EMG
speech recognition research, which has the advan-
tages of better noise robustness and better applicabil-
ity compared to traditional acoustic speech recogni-
tion. With the special EMG feature extraction meth-
ods and articulatory feature analyses, we have ad-
vanced the EMG speech recognition research from
isolated word recognition to phone-based continuous
speech recognition. Besides, the introduction of an-
ticipatory effect modeling also plays an important role
in this study. In summary, the EMG articulatory fea-
ture performance improves from 0.467 to 0.686 and
the overall speech recognition word error rate im-
proves from 86.8% to 29.9%.
This research topic is relatively new and unex-
plored with many questions waiting for answers. Al-
though the proposed special EMG feature extraction
methods do improve the performance, we believe they
are still sub-optimal. Designing a better EMG feature
extraction method for speech recognition is still an
open problem and we are continuously working on it.
Another issue is that the multi-channel EMG signals
are inherently asynchronous with respect to articula-
tory apparatus movements. How to model this asyn-
chronicity remains an open problem. We believe this
modeling would benefit the study of speech recogni-
tion as well as articulatory kinematics.
REFERENCES
Becker, K. (2005). Varioport. http://www.becker-
meditec.de.
Betts, B. and Jorgensen, C. (2006). Small vocabulary com-
munication and control using surface electromyogra-
phy in an acoustically noisy environment. In Proc.
HICSS, Hawaii.
Chan, A., Englehart, K., Hudgins, B., and Lovely, D.
(2002). Hidden Markov model classification of my-
oelectric signals in speech. IEEE Engineering in
Medicine and Biology Magazine, 21(4):143–146.
Fromkin, V. and Ladefoged, P. (1966). Electromyography
in speech research. Phonetica, 15.
EARS: ELECTROMYOGRAPHICAL AUTOMATIC RECOGNITION OF SPEECH
11

Jorgensen, C. and Binsted, K. (2005). Web browser control
using EMG based sub vocal speech recognition. In
Proc. HICSS, Hawaii.
Jorgensen, C., Lee, D., and Agabon, S. (2003). Sub auditory
speech recognition based on EMG signals. In Proc.
IJCNN, Portland, Oregon.
Maier-Hein, L., Metze, F., Schultz, T., and Waibel, A.
(2005). Session independent non-audible speech
recognition using surface electromyography. In Proc.
ASRU, San Juan, Puerto Rico.
Manabe, H., Hiraiwa, A., and Sugimura, T. (2003). Un-
voiced speech recognition using EMG-Mime speech
recognition. In Proc. CHI, Ft. Lauderdale, Florida.
Manabe, H. and Zhang, Z. (2004). Multi-stream HMM
for EMG-based speech recognition. In Proc. IEEE
EMBS, San Francisco, California.
Metze, F. and Waibel, A. (2002). A flexible stream archi-
tecture for ASR using articulatory features. In Proc.
ICSLP, Denver, CO.
Yu, H. and Waibel, A. (2000). Streaming the front-end of a
speech recognizer. In Proc. ICSLP, Beijing, China.
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
12
