
AN ECoG BASED BRAIN COMPUTER INTERFACE WITH
SPATIALLY ADAPTED TIME-FREQUENCY PATTERNS
Nuri F. Ince, Fikri Goksu and Ahmed H. Tewfik
Department of Electrical and Computer Engineering, University of Minnesota, 200 Union St. SE, 55455, Minneapolis, U.S.A.
Keywords: Electrocorticogram, Brain Computer Interface, Time Frequency, Undecimated Wavelet Packet Transform.
Abstract: In this paper we describe an adaptive approach for the classification of multichannel electrocorticogram
(ECoG) recordings for a Brain Computer Interface. In particular the proposed approach implements a time-
frequency plane feature extraction strategy from multichannel ECoG signals by using a dual-tree
undecimated wavelet packet transform. The dual-tree undecimated wavelet packet transform generates a
redundant feature dictionary with different time-frequency resolutions. Rather than evaluating the individual
discrimination performance of each electrode or candidate feature, the proposed approach implements a
wrapper strategy to select a subset of features from the redundant structured dictionary by evaluating the
classification performance of their combination. This enables the algorithm to optimally select the most
informative features coming from different cortical areas and/or time frequency locations. We show
experimental classification results on the ECoG data set of BCI competition 2005. The proposed approach
achieved a classification accuracy of 93% by using only three features.
1 INTRODUCTION
Brain-computer interfaces (BCIs) use the electrical
activity of the brain for communication and control.
Since the muscles are bypassed, a BCI can be used
by people with motor disabilities to interact with
their environment. Electroencephalogram (EEG) is
widely used in BCIs due to its non-invasiveness.
However, the low signal to noise ratio (SNR) and
spatial resolution of EEG limit its effectiveness in
BCIs. On the other hand invasive methods such as
single neuron recordings have higher spatial
resolution and SNR. However, they have clinical
risks. Furthermore, maintaining long term reliable
recording with implantable electrodes is difficult.
On the other hand, an electrocorticogram (ECoG)
has the ability to provide long term recordings from
the surface of brain. Furthermore, ECoG signals
also provide information about oscillatory activities
in the brain with a much higher bandwidth than EEG
(Leuthardt 2004). Therefore, existing algorithms for
EEG classification are readily applicable to ECoG
processing.
Various events in brain signals such as slow cortical
potentials, motor imagery (MI) related sensorimotor
rhythms, and visual evoked potentials were used in
construction of ECoG based BCIs (Wolpaw 2000,
Pfurtscheller 2001). In MI based BCIs, the subjects
are asked to perform an imagined rehearsal of either
hand/finger or foot movement without any muscular
output. Related events in sensorimotor rhythms such
as alpha (7-13Hz) and beta (16-32Hz) bands are
processed to recognize the executed task using only
brain waves. Several methods have been proposed to
extract relevant features for BCI classification from
rhythmic activities. Methods such as autoregressive
modeling and sub band energies in predefined
windows are widely used in single trial ECoG
classification (Schlogl 1997, Prezenger 1999).
When used with multi channel recordings, all of
these methods need to deal with the high
dimensionality of the data. Selecting the most
informative electrodes and adapting to subject
specific oscillatory patterns is critical for accurate
classification. However, due to the lack of prior
knowledge, selection of the most informative
electrode locations can be difficult. Furthermore, it
is well known that there exists a great deal of inter
subject variability of EEG and ECoG patterns in
spatial, temporal, and frequency domains (Ince
2006, Ince 2007, Leuthardt 2004, Prutscheller 2001
and Schlogl 1999). In (Ramoser 2000), the common
spatial patterns (CSP) method was proposed to
classify multichannel EEG recordings. The CSP
132
F. Ince N., Goksu F. and H. Tewfik A. (2008).
AN ECoG BASED BRAIN COMPUTER INTERFACE WITH SPATIALLY ADAPTED TIME-FREQUENCY PATTERNS.
In Proceedings of the First International Conference on Bio-inspired Systems and Signal Processing, pages 132-139
DOI: 10.5220/0001068701320139
Copyright
c
SciTePress
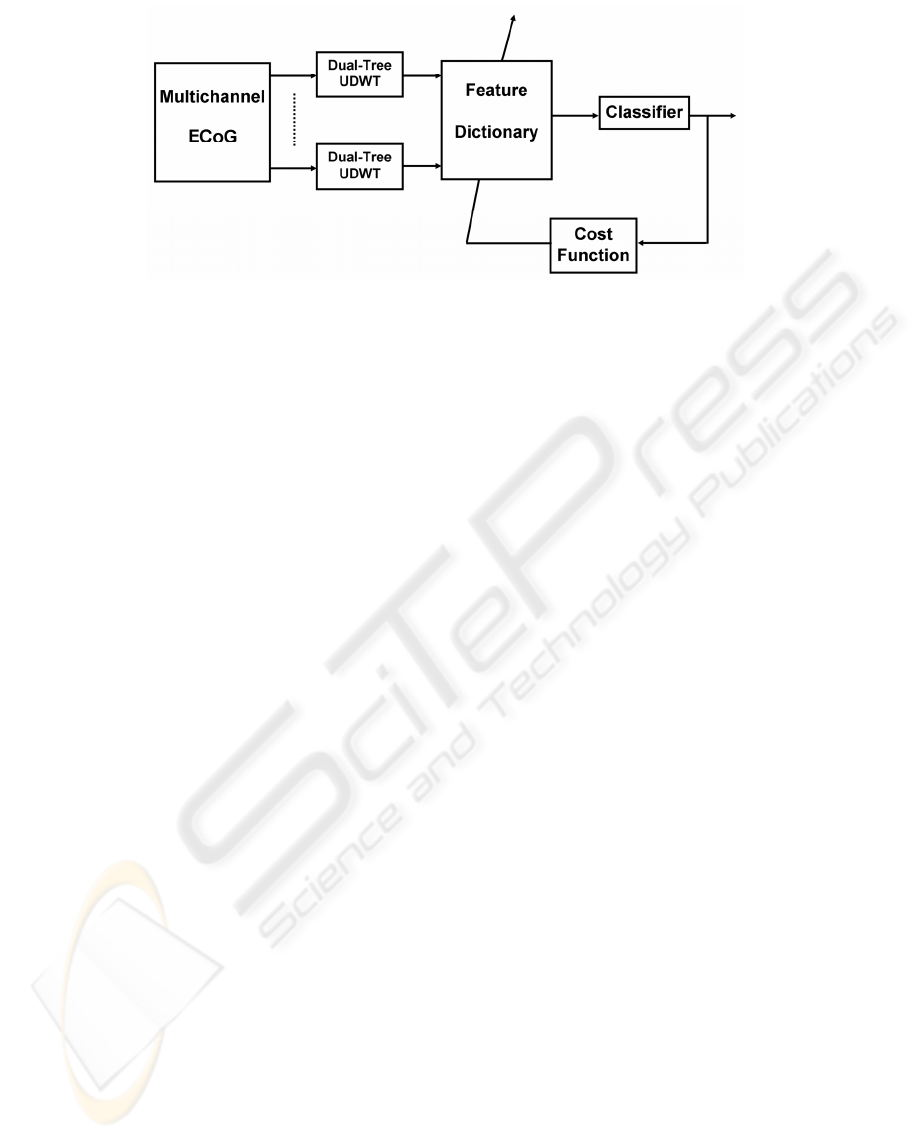
Figure 1: The block diagram of the proposed feature extraction and feature subset selection technique.
method weighs each electrode location for
classification and uses the correlation between
channels to increase the SNR of the extracted
features. Although the performance is increased with
CSP, it has been shown that this method requires a
number of electrodes to improve classification
accuracy and that it is very sensitive to electrode
montage. Furthermore, since it uses the variance of
each channel, this method does not account for the
spatiotemporal differences in distinct frequency
subbands. Recently, time-frequency methods have
been proposed as an alternative strategy for the
extraction of MI related patterns in BCI’s (Wang
2004, Ince2006 and Ince 2007). These methods
utilized the entire time-frequency plane of each
channel and integrate components with different
temporal and spectral characteristics. Promising
results were reported on well known data sets while
classifying multichannel EEG. One of the main
difficulties with these methods is once again dealing
with the high dimensionality of the data collected.
Furthermore, the adaptation to important patterns is
implemented either by only accounting for the
discrimination power of individual electrode
locations or simultaneous processing of a large
number of electrodes.
In this paper we tackle these problems by
implementing a spatially adapted time-frequency
plane feature extraction and classification strategy.
To our knowledge this is the first time that an
approach implements a joint processing of ECoG
features with different time and frequency resolution
coming from distinct cortical areas for classification
purposes. The algorithm proposed in this paper
requires no prior knowledge of relevant time-
frequency indices and related cortical areas. In
particular, as a first step, the proposed approach
implements a time-frequency plane feature
extraction strategy on each channel from
multichannel ECoG signals by using a dual-tree
undecimated wavelet packet transform (UDWT).
The dual-tree undecimated wavelet packet transform
forms a redundant, structured feature dictionary with
different t-f resolutions. In the next step, this
redundant dictionary is used for classification.
Rather than evaluating the individual discrimination
performance of each electrode or candidate feature,
the proposed approach selects a subset of features
from the redundant structured dictionary by
evaluating the classification performance of their
combination using a wrapper strategy. This enables
the algorithm to optimally select the most
discriminative features coming from different
cortical areas and/or time-frequency locations. A
block diagram summarizing the technical concept is
given in Figure 1. In order to evaluate the efficiency
of the proposed method we test it on the ECoG
dataset of BCI competition 2005.
The paper is organized as follows. In the next
section we describe the extraction of structural time-
frequency features with dual-tree undecimated
wavelet transform. In the following section we
discuss available feature selection procedures and
details of our proposed solutions. We describe the
multichannel ECoG data in section 4. Finally we
provide experimental results in section 5 and discuss
our findings in section 6.
2 FEATURE EXTRACTION
Let us describe our feature dictionary and explain
how it is computed from the wavelet-based dual-tree
structure. A schematic diagram of the dual tree is
shown in Figure 2. As indicated in the previous
sections, the ECoG can be divided into several
AN ECoG BASED BRAIN COMPUTER INTERFACE WITH SPATIALLY ADAPTED TIME-FREQUENCY
PATTERNS
133
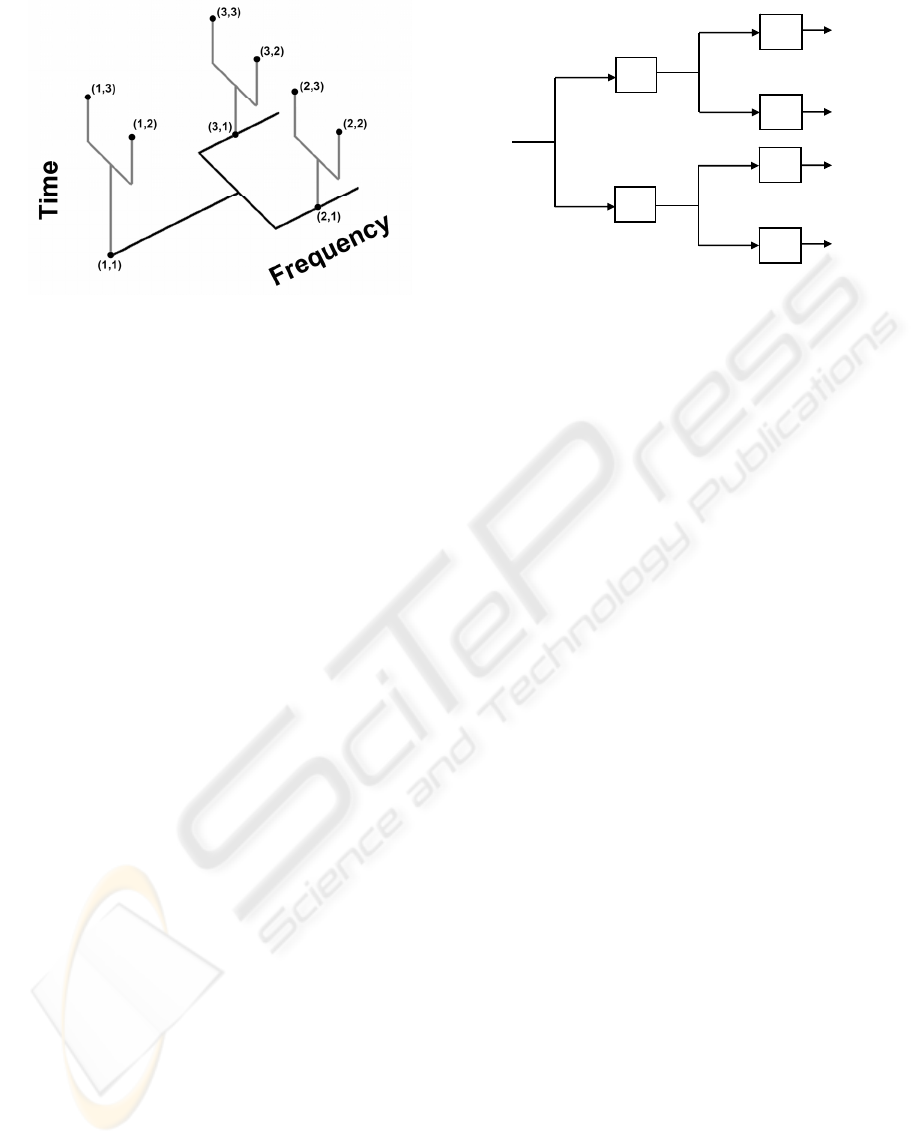
Figure 2: This dual tree uses 1-level in both planes. Each
node of the horizontal tree is a frequency subbands. Node
{1,1} represents unfiltered original signal, node{2,1}
represents low pass filtered signal and node {3,1} high
pass filtered. Each of these subbands is segmented in time
into 3 segments, as shown in the vertical tree. Segment
{1,1},{2,1} and {3,1} covers the whole subband, segment.
{1,2},{2,2} and {3,2} covers the first and segments with
time indices three the second half of it.
X[n]
H(z
2
)
G(z
2
)
H(z)
G(z)
H(z
2
)
G(z
2
)
X
H
[n]
X
G
[n]
X
HH
[n]
X
HG
[n]
X
GH
[n]
X
GG
[n]
Figure 3: The pyramidal undecimated wavelet tree.
frequency subbands with distinct and subject
depended characteristic. In order to extract
information from these rhythms, we examine
subbands of the ECoG signal by using an
undecimated wavelet transform. In each subband, a
second pyramidal tree is utilized to extract the time
varying characteristics of the subband.
2.1 Undecimated Wavelet Transform
Discrete Wavelet Transform (DWT) and its variants
have been extensively used in 1D and 2D signal
analysis (Vetterli 2001). However, the
downsampling operator at the outputs of each filter
produces a shift variant decomposition. In practice, a
shift in the signal is reflected by abrupt changes in
the extracted expansion coefficients or related
features. In (Unser 1995) the undecimated wavelet
transform is proposed to extract subband energy
features which are shift invariant. This is achieved
by removing the downsampling operation. The
output at any level of pyramidal filter bank is
computed by using an appropriate filter which is
derived by upsampling the basic filter.
A filter g(n) with a z-transform G(z) that satisfies the
quadrature mirror filter condition
11
() ( ) ( ) ( ) 1GzGz G zG z
−−
+− − = (1)
is used to construct the pyramidal filter bank (Figure
3). The high-pass filter h(n) is obtained by shifting
and modulating g(n). Specifically, the z transform of
h(n) is chosen as
1
() ( ).Hz zG z
−
=− (2)
The subsequent filters in the filter bank are then
generated by increasing the width of f(n) and g(n) at
every step, e.g.,
2
1
() ( )
i
i
Gz Gz
+
=
2
1
() ( )
i
i
HzHz
+
=
, (i=0,1,. . . . ., N). (3)
In the signal domain, the filter generation can be
expressed as
1
2
() []
i
i
g
k
g
+
↑
=
1
2
() []
i
i
hk h
+
↑
=
(4)
where the notation
m↑
[] denotes the up-sampling
operation by a factor of m.
The horizontal pyramidal tree of Fig.2 provides
subband decomposition of the ECoG signal. Next,
we segment the signal in each subband with
rectangular time windows. Such an approach will
extract the temporal information in each subband.
As in the frequency decomposition tree, every node
of the frequency tree is segmented into time
segments with a pyramidal tree structure. Each
parent time window covers a space as the union of
its children windows. In a given level, the length of
a window is equal to L/2
t
where L is the length of
signal and t denotes the level. The time segmentation
explained above forms the second branch (vertical)
of the double tree. After segmenting the signal in
time and frequency, we retain the energy of each
node of the dual-tree as a feature. By using a dual
tree structure we could calculate a rich library of
features describing the ECoG activities with several
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
134

spectro-temporal resolutions. From now on we keep
the index information of the dual tree structure to be
used in the later stage for dimension reduction via
pruning.
To summarize this section the reader is referred to
the double tree structure in Fig. 2. Note that the dual
tree structure satisfies two conditions:
- For a given node in the frequency tree, the mother
band covers the same frequency band width (BW) as
the union of its children
12
( )
Mother Child Child
BW BW BW⊃∪ (5)
- This same condition is also satisfied along the time
axis. For a given node, the number of time samples
(TS) of the mother window is equal to that of the
union of its children.
12
( )
Mother Child Child
TS TS TS⊃∪ (6)
These two properties allow us to prune the tree
structure. When a particular feature index is
selected, one can remove those indices from the dual
tree structure that overlap in time and frequency
with the selected index. Let T be the number of
levels use to decompose the signal in time and F be
the number levels use to decompose the signal in the
frequency domain, there will be 2
(F+1)
-1 subbands
(including the original signal) and 2
(T+1)
-1 time
segments for each subband. This will make the total
number of potential features NF=(2
(F+1)
-1)(2
(T+1)
-1).
3 SUBSET SELECTION
Calculating the dual-tree features for each electrode
location forms a redundant feature dictionary. The
redundancy comes from the dual tree structure. As
explained in the previous section the dual tree has
total NF=(2
(F+1)
-1)(2
(T+1)
-1) features for each signal
where F is the total number of frequency levels and
T the total number of time levels. In a typical case,
T=3, F=4 and over 64 electrodes are used resulting
in a dictionary with around thirty thousand features.
In such a high dimensional space (NF=29760) the
classifier may easily go into over-learning and
provide a lower generalization capability.
Here, we incorporate the structural relationship
between features in the dictionary and use several
feature subset selection strategies to reduce the
dimensionality of the feature set. Since the features
are calculated in a tree structure, efficient algorithms
were proposed in the past for dimensionality
reduction. In (Saito 1996) a pruning approach was
proposed which utilizes the relationship between the
mother and children subspaces to decrease the
dimensionality of the feature set. In particular, each
tree is individually pruned from bottom to top by
maximizing a distance function. The resulting
features are sorted according to their discrimination
power and the top subset is used for classification.
Although such a filtering strategy with pruning will
provide significant dimension reduction by keeping
the most predictive features, it does not account for
the interrelations between features in the final
classification stage. Here, we reshape and combine
the pruning procedure for feature selection with a
wrapper strategy. In particular, we quantify the
efficiency of each feature subset by evaluating its
classification accuracy with a cost measure and we
use this cost to reformulate our dictionary via
pruning.
Four different types of methods are considered
for feature selection in this study. The structure in
Figure 1 is general representation of each of the four
methods. The left most box in Figure 1 is the rich
time-frequency feature dictionary. On the right end a
linear discriminant (LDA) is used both for
classification and extracting the relationship among
combinations of features. This output is fed to a cost
function to measure the discrimination power for
that combination of features. This measure will be
used to select the best among all other feature
combinations. Furthermore, depending on the
selected feature index, a pruning operation will be
implemented to reduce the dimensionality in the rich
feature dictionary.
In this particular study, the Fisher Discrimination
(FD) criterion is used as a cost function.
()
2
12
22
12
FD
μμ
σ
σ
−
=
+
. (7)
The four different strategies mentioned above are:
Sequential forward feature selection (SFFS), SFFS
with pruning (SFFS-P), Cost function based pruning
and feature Selection (CFS), and CFS with principal
component analysis (PCA) post processing.
3.1 Sequential Forward Feature
Selection: SFFS
The SFFS is a wrapper strategy which selects a
subset of features one by one. A cost function is
used on classifier output to measure the efficiency of
each feature. By using LDA, the feature vectors are
projected on a one dimensional space. Then the FD
criterion was used to estimate the efficiency of the
projection. After this search is done over all feature
vectors, the best feature index is selected by
AN ECoG BASED BRAIN COMPUTER INTERFACE WITH SPATIALLY ADAPTED TIME-FREQUENCY
PATTERNS
135
(a)
(b)
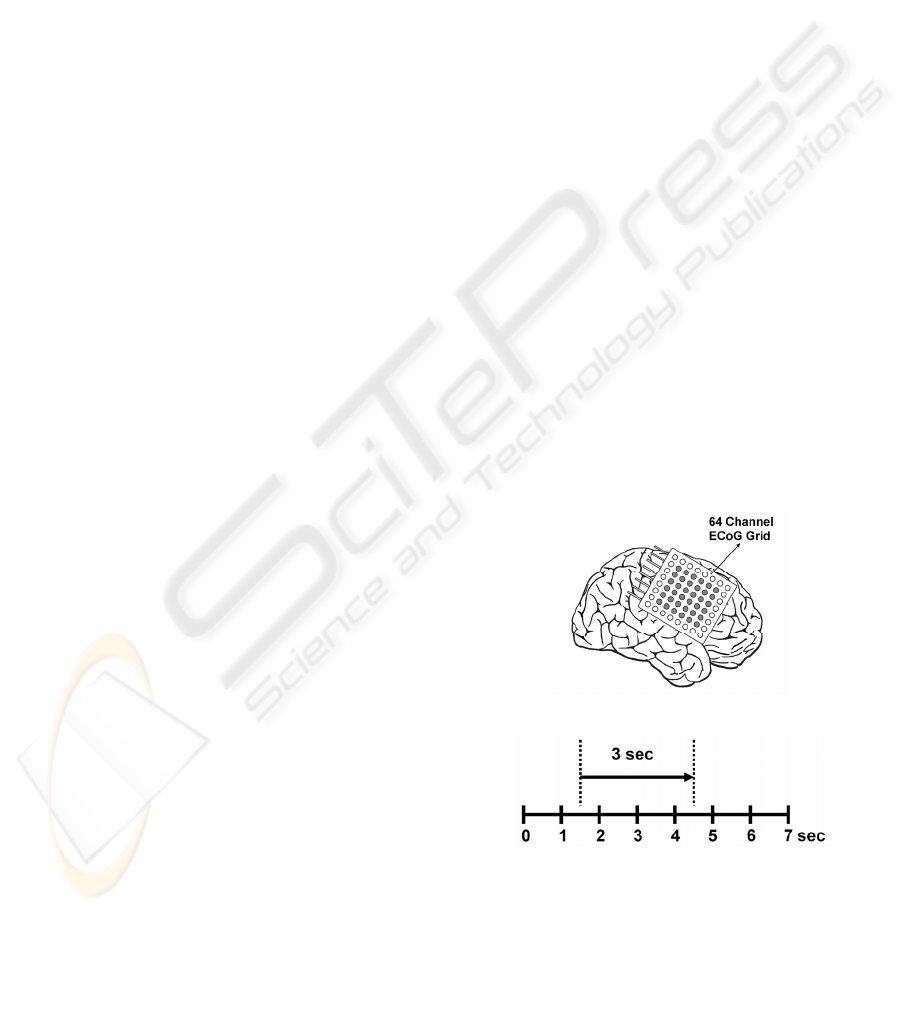
Figure 4: The 8x8 electrode grid was placed on the right
hemisphere over the motor cortex (Modified from Lal
2005). For surface Laplacian derivation only marke
d
electrodes are used. (b) The timing diagram of the
experimental paradigm. The go cue for motor imagery is
given at second one. A three second time window starting
after 500ms of go cue is used to classify ECoG data.
comparing the cost values of each feature vector. In
the next step the feature vector which will do the
best in combination with the first selected ones is
identified by searching over the remaining feature
vectors. This procedure is run until a desired number
of features is reached. Note that SFFS uses all the
boxes and connections in Figure 1 except for the
feedback from the cost function to the dictionary.
Since no dimension reduction is implemented on the
entire feature space, this approach has high
computational complexity.
3.2 SFFS with Pruning: SFFS-P
The SFFS-P is also a wrapper strategy with an
additional pruning module for dimension reduction.
Once a feature index is selected, the corresponding
frequency tree and time tree indexes are calculated
on the dual-tree. Then the nodes that overlap with
the selected feature index in time and frequency are
removed. Next, the feature which will do best in
combination with the first selected feature is
identified by searching the pruned dictionary. In
other words, the dictionary is pruned based on the
last selected feature. This procedure is run until the
desired number of features is reached. Therefore, the
only difference between SFFS and SFFS-P is that
pruning is done on the dictionary based on the
selected features. This provides a fast decrease in the
number of candidate features and complexity is
much smaller than SFFS.
3.3 Cost Function based Pruning and
Feature Selection (CFS)
The CFS is a filtering approach that uses the
structure in the feature dictionary for pruning. After
finalizing the pruning procedure for each electrode
location, it uses a cost function to rank the features.
In particular, it uses the FD criterion to rank the
features. It does not use either the LDA or the
feedback path in Figure 1. Instead, using the FD
measure, a cost value is computed for each node on
the double tree individually. Then a pruning
algorithm is run on the double tree by keeping the
nodes with maximum discrimination. Once a node is
selected all nodes overlapping with the selected one
are removed. This procedure is iterated until no
pruning can be implemented. After pruning the dual-
trees for each electrode location, the resulting
feature set is sorted according to their corresponding
discrimination power and input to the classifier. In
this way the most predictive features were entered to
the classification module. Since no feedback is used
from the classifier, the CFS has lower computational
complexity than the other two methods.
The CFS method works as a filter on the electrodes
by only keeping those indices with maximum
discrimination power. However, since features are
evaluated according to their discrimination power
individually, such a method does not account for the
correlations between features. In (Ince 2006 and
Ince 2007) PCA analysis is performed on a subset of
top sorted features to obtain a decorrelated feature
set. The PCA post processed features are sorted
according to their corresponding eigenvalues in
decreasing order and used in classification. Here we
will also use the PCA as a post processing step with
the CFS to obtain a deccorelated feature set. We will
refer this method as CFS-PCA.
4 MULTICHANNEL ECoG DATA
In order to evaluate the performance of the proposed
method we used the multichannel ECoG (Lal 2005)
dataset of BCI competition 2005
(ida.first.fraunhofer.de/projects/bci/competition_iii/)
During the BCI experiment, a subject had to perform
imagined movements of either the left small finger
or the tongue. The ECoG data was recorded using an
8x8 ECoG platinum electrode grid which was placed
on the contralateral (right) motor cortex as shown in
Figure 4. All recordings were performed with a
sampling rate of 1000Hz. Every trial consisted of
either an imagined tongue or an imagined finger
movement and was recorded for 3 seconds duration.
To avoid visually evoked potentials being reflected
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
136
1 8
57 64
(a) (b)
(c) (d)
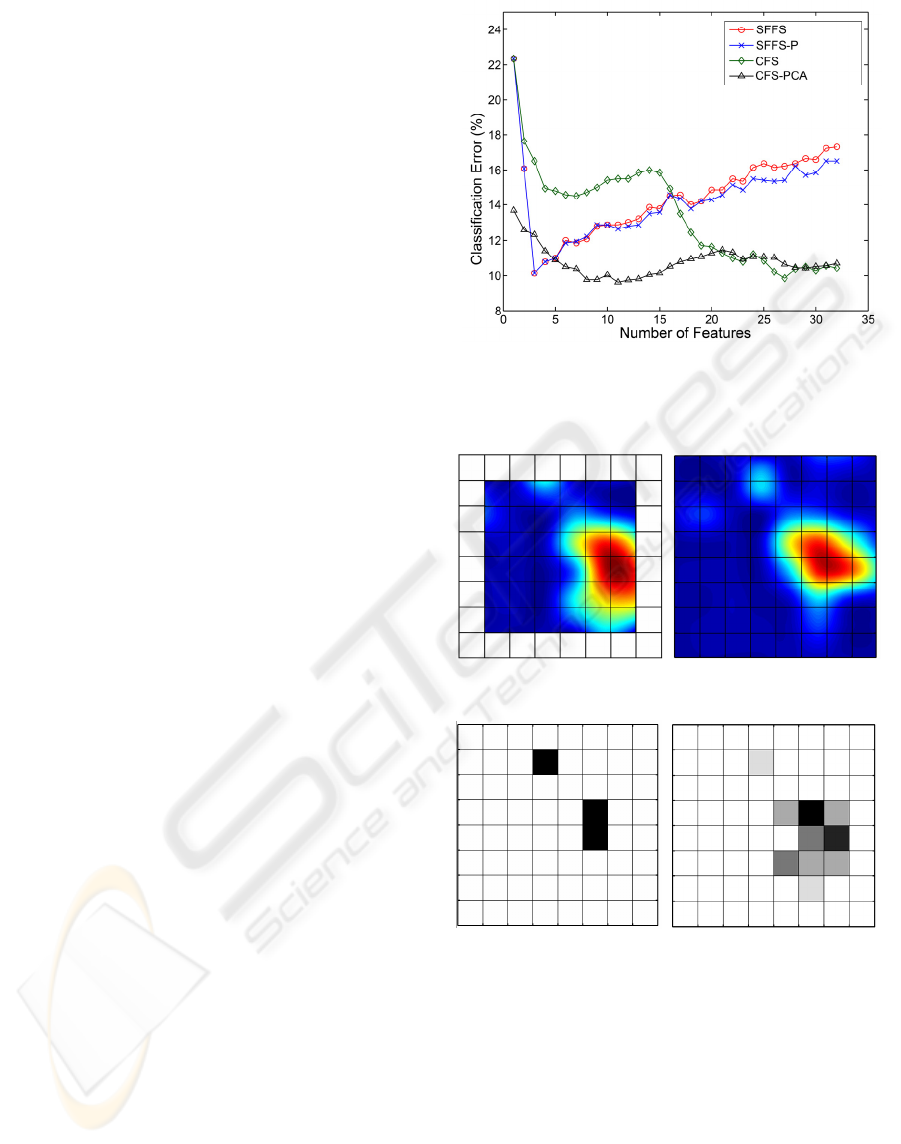
Figure 6: Discriminant cortical areas (a) Laplacian (b)
Monopolar. The number of selected features fro
m
different electrode locations in Laplacian derivation fo
r
SFFS-P (c) and for CSF(d) are given. The darker areas
indicate a higher number of features are selected fro
m
these regions. Note that SFFS-P provides a balance
d
feature distribution. The CSF selected most of 27 features
from the same region.
Figure 5: The cross validation error curves for the
different methods in the training data.
by the data, the recording intervals started 0.5
seconds after the visual cue had ended. Each channel
was filtered with a low pass filter in 0-120Hz band.
The filtered data was down sampled by a factor 4 to
250Hz. Each trial was expanded from 750 samples
into 768 samples by symmetric extension on the
right side to enable segmentation in a pyramidal tree
structure. Besides monopolar data, we also consider
ECoG data that is processed using a surface
Laplacian derivation. More specifically, each
electrode data is subtracted from the weighted
average of the surrounding 6 electrodes. The
electrodes on the border are eliminated from the
analysis resulting in a total of 36 electrodes (See
Figure 4). For monopolar data all 64 electrodes were
used for analysis. We used 278 trials for training and
100 trials for testing. The training and test data were
recorded from the same subject and with the same
task, but on two different days with about 1 week in
between.
5 RESULTS
To extract the dual tree features we select T=3 and
F=4. For a 125 Hz bandwidth, the frequency tree
provided around 8Hz resolution at the finest level.
Along the time axis, the time resolution was 375ms.
The 12 tap Daubechies filter (db6) was used in
constructing the frequency tree of the UDWT. In
order to learn the most discriminant time-frequency
indices and the corresponding cortical areas we
utilized a 10 times 10 fold cross validation in the
training dataset. The optimal feature number at
which the classification error is minimal is selected
from the averaged cross validation error curves.
Then, the learned feature indices are used in testing
the classifier on the test set. The results obtained
with the different methods are presented in Table.1.
We note that the SFFS and SFFS-P provided the
highest classification accuracy with only three
features on the test set using the Laplacian
derivation. Although a lower error rate was achieved
by CFS with the training data, interestingly, the
testing error rate of the CFS was higher than those of
the other methods. We also note that a large number
of features were used by CFS to achieve 9.9% error
rate in the training set. In contrast, the SFFS and
SFFS-P algorithms used only 3 features to achieve
the minimum 10.2% error rate. The cross validation
error curves versus the number of features are given
in Figure 5. Since the results using Laplacian
derivation outperformed those obtained with
monopolar data, only the results corresponding to
the former are provided.
As can be seen clearly from these curves, SFFS and
SFFS-P select the best combination of features and
achieve the minimal error with only three features.
AN ECoG BASED BRAIN COMPUTER INTERFACE WITH SPATIALLY ADAPTED TIME-FREQUENCY
PATTERNS
137
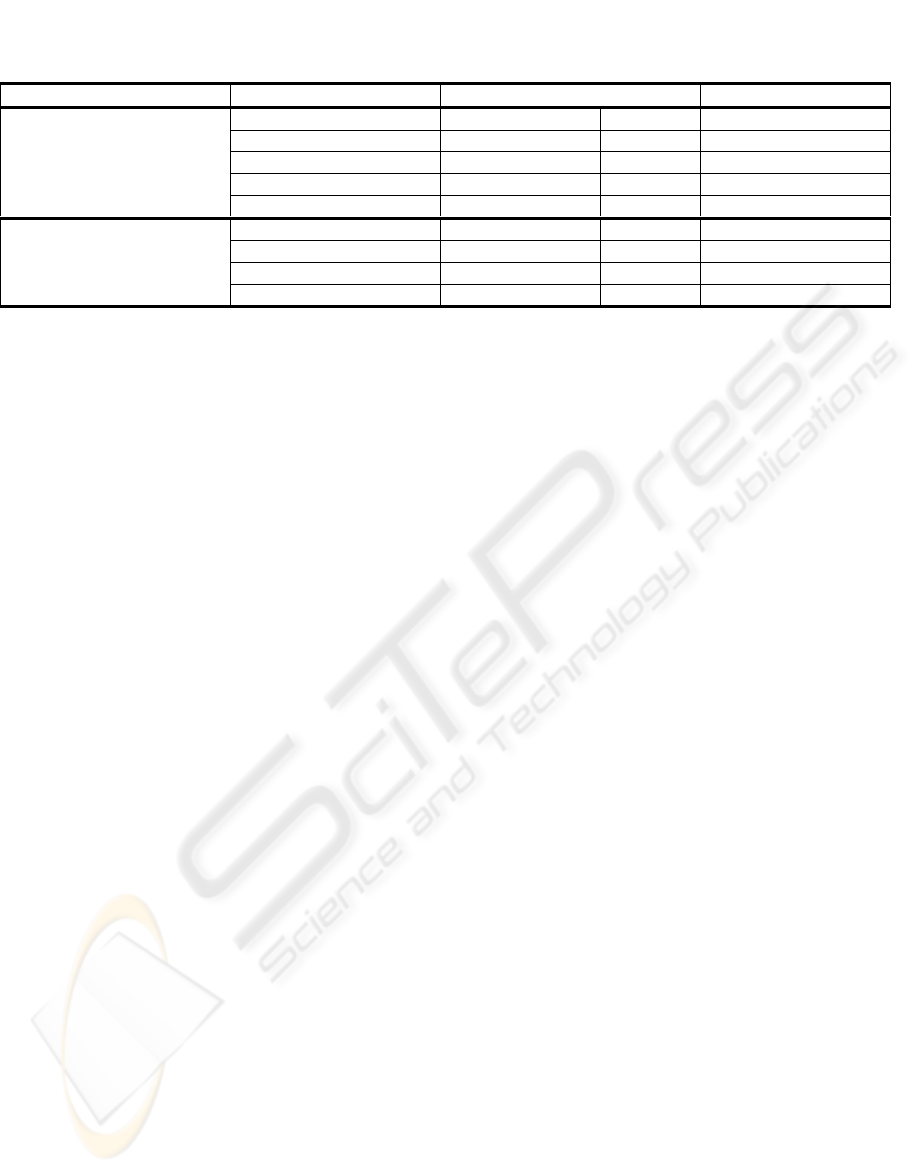
Table 1: The cross validation (CV) and test error rates of different methods and related number of features (NoF) used for
final classification.
Training Test
Method CV Error (%) NoF Error (%)
SFFS 10.2 3 7
SFFS-P 10.2 3 7
CSF 9.9 27 18
Laplacian
CSF-PCA 9.6 11 8
SFFS 12.6 3 20
SFFS-P 10.3 4 9
CSF 11.7 22 12
Monopolar
CSF-PCA 11.2 14 8
Furthermore, using the structure of the feature
dictionary, SFFS-P achieves this result with reduced
complexity due to pruning. The pruning process
provides a dimension reduction and feature
decorrelation. CFS, on the other hand, achieves the
minimal error using a large number of features. The
interactions among the selected features cannot be
taken into account with this approach. In addition
the correlated neighbor areas may result in a
duplication of information in the sorted features. In
order to decorrelate the features a Principal
Component Analysis (PCA) was employed on the
CFS ordered features. This post processing step
provided lower error rates than those achieved by
CFS alone. The test error rate was 8% for the PCA
post processed features. It should be noted here that
CFS-PCA produced comparable results with those
of SFFS and SFFS-P. However one should note that
PCA induces an additional complexity. This method
requires all 32 features to be extracted from ECoG
which leads to a much higher computational
complexity compared to three features selected by
SFFS and SFFS-P.
Since the testing data was recorded on another date,
the variability in the ECoG signal is expected. The
results obtained indicate that the CFS algorithm is
very sensitive to this type of variability. Although
the cross validation error in the training set was low,
the testing error rate was much higher compared to
other methods. We believe that the correlated
activity across cortical areas is an important reason
why CFS selects the same information repeatedly.
Since the SFFS and SFFS-P have the advantage of
examining the interactions between different cortical
areas and t-f locations, these subset selection
algorithms can form a more effective subset of
features for classification. In order to support our
hypothesis we show the discriminatory cortical maps
of monopolar and Laplacian derivations in Figure 6.
In order to generate these images we used the most
discriminant feature of each electrode location and
produced an image over the 8x8 grid to present the
distribution of the most discriminative locations.
Furthermore, we mark the electrode locations
selected by SFFS, SFFS-P, and CFS for
classification. After inspecting Figure 6 (a) and (b)
we noticed that a large number of neighbor electrode
locations carry discriminant information. The CFS
method used a large number of electrodes from this
region for classification. In contrast, the SFFS and
SFFS-P methods selected another cortical area from
upper side of the grid. Even though this electrode
location does not seem to be very discriminative, it
played a key role in achieving a lower classification
rate on the validation data.
Since only three features are used by SFFS and
SFFS-P, they are more robust to intra-subject
variability of ECoG signals. Note also that the error
rate in monopolar derivation is much higher than
that of the Laplacian derivation. We observed large
DC changes in ECoG signals in the test data set.
Since the Laplacian derivation provides a
differential operator, large baseline wanders
affecting many electrodes are eliminated in this
setup. However, for the monopolar recordings the
features are very sensitive to this type of changes.
Note also that the validation accuracy of SFFS
and SFFS-P in the test set is higher than the cross
validation accuracy. One of the underlying reasons
could be that the subject can control his/her brain
patterns with a higher accuracy with the increasing
number of trials. In addition the SNR of the signals
might have improved over time due to tissue
electrode interaction.
Finally, we compared our proposed method’s
test result with those of achieved at the BCI
competition in 2005 using the same ECoG data. The
classification accuracies and methods used in each
method are presented in Table 2. Our method
achieved the best result of 7% error with both SFFS
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
138
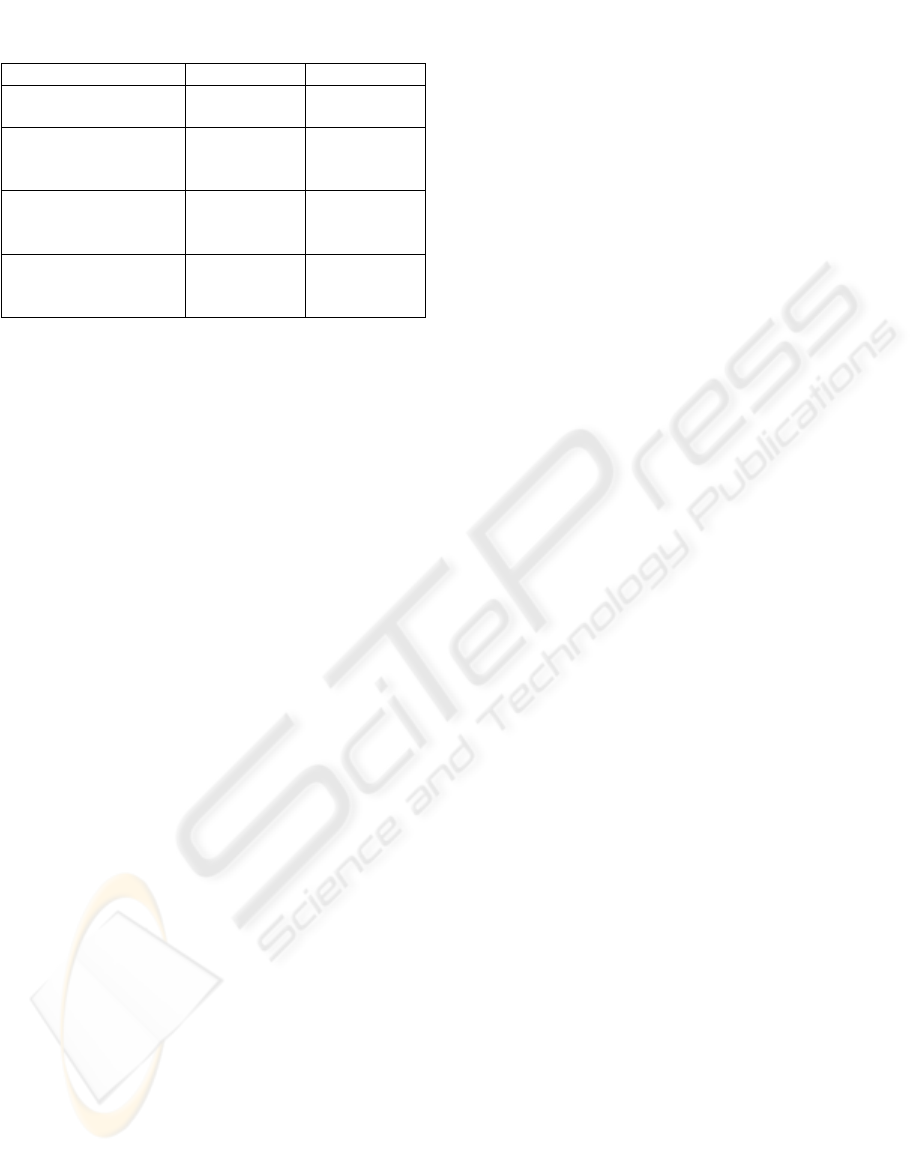
Table 2: The comparison of the proposed method with the
best three methods from the BCI 2005 competition.
Features Used Classifier Error (%)
UDWT based
subband energies
LDA 7
Common Spatial
Subspace
Decomposition
Linear SVM 9
ICA combined with
spectral power and
AR coefficients
Regularized
logistic
regression
13
Spectral power of
manually selected
channels
Logistic
regression
14
and SFFS-P methods. We note that our proposed
approach has outperformed both CSP and AR model
based techniques.
6 CONCLUSIONS
In this paper we proposed a new feature extraction
and classification strategy for multi-channel ECoG
recordings in a BCI task. Rather than using
predefined frequency indices or manually selecting
cortical areas, the algorithm implemented an
automatic feature extraction and subset selection
procedure over a redundant time-frequency feature
dictionary. This feature dictionary was obtained by
decomposing the ECoG signals into subbands with
an undecimated wavelet transform and then
segmenting each subbband in time successively. By
combining a wrapper strategy with dictionary
pruning, the method achieved 93% classification
accuracy using only three features. The results we
obtained show that the proposed method is a good
candidate for the construction of an ECoG based
invasive BCI system with very low computational
complexity and high classification accuracy.
REFERENCES
Ince N. F., Tewfik A., Arica S., 2007, “Extraction subject-
specific motor imagery time-frequency patterns for
single trial EEG classification”, Comp. Biol. Med.
Elsevier.
Ince N. F., Arica S., Tewfik A., 2007, “Classification of
single trial motor imagery EEG recordings by using
subject adapted non-dyadic arbitrary time-frequency
tilings,” J. Neural Eng. 3, 235-244.
Lal Thomas N., et.al., 2005, Methods Towards Invasive
Human Brain Computer Interfaces. Advances in
Neural Information Processing Systems (NIPS17, 737-
744. (Eds.) Saul, L. K., Y. Weiss, L. Bottou, MIT Press,
Cambridge, MA, USA).
Leuthardt E. C. , Schalk G., Wolpaw J. R., Ojemann J. G.
and Moran D. W., 2004, A brain–computer interface
using electrocorticographic signals in humans, Journal
of Neural Engineering, pp. 63–71.
Pfurtscheller G., Neuper C., 2001. Motor Imagery and
Direct Brain-Computer Interface. Proceedings of
IEEE, vol.89, pp. 1123-1134.
Prezenger M., Pfurtscheller G., 1999. Frequency
component selection for an EEG-based brain computer
interface. IEEE Trans. on Rehabil. Eng. 7, pp. 413-
419.
Ramoser H., Müller-Gerking J., and Pfurtscheller G.,
2000. Optimal spatial filtering of single trial EEG
during imagined hand movement. IEEE Trans. Rehab.
Eng., vol. 8, no. 4, pp. 441–446.
Saito N. et al., 2002, Discriminant feature extraction using
empirical probability density and a local basis library,
Pattern Recognition, vol.35, pp. 1842-1852.
Schlögl A., Flotzinger D., Pfurtscheller G., 1997. Adaptive
autoregressive modeling used for single trial EEG
classification. Biomed. Technik,42, pp. 162-167.
Unser M., 1995. Texture classification and segmentation
using wavelet frames. IEEE Trans. Image Proc., pp.
1549–60, Vol.4(11), Nov.
Vetterli M., 2001. Wavelets, approximation, and
compression,'' IEEE Signal Proc. Magazine, pp. 59–
73, Sept..
Wang T., and B. He, 2004. Classifying EEG-based motor
imagery tasks by means of time–frequency
synthesized spatial patterns. Clin. Neuro. vol.115, pp.
2744–2753.
Wolpaw J. R., et.al., 2000. Brain-Computer Interface
Technology: A review of the first international
meeting, IEEE Trans. On Rehab. Eng. 8 164-73.
AN ECoG BASED BRAIN COMPUTER INTERFACE WITH SPATIALLY ADAPTED TIME-FREQUENCY
PATTERNS
139
