
MODEL-FREE MARKERLESS TRACKING FOR REMOTE
SUPPORT IN UNKNOWN ENVIRONMENTS
Alexander Ladikos, Selim Benhimane, Nassir Navab
Department of Computer Science, Technical University of Munich, Boltzmannstr. 3, 85748 Garching, Germany
Mirko Appel
Siemens Corporate Technology, Munich, Germany
Keywords:
Tracking, Real-Time Vision, Remote Support, Augmented Reality.
Abstract:
We propose a complete system that performs real-time markerless tracking for Augmented Reality-based
remote user support in a priori unknown environments. In contrast to existing systems, which require a prior
setup and/or knowledge about the scene, our system can be used without preparation. This is due to our
tracking algorithm which does not need a 3D-model of the scene or a learning-phase for the initialization.
This allows us to perform fast and robust markerless tracking of the objects which are to be augmented. The
proposed solution does not require artificial markers or special lighting conditions. The only requirement is
the presence of locally planar objects in the scene, which is true for almost every man-made structure and in
particular technical installations. The augmentations are chosen by a remote expert who is connected to the
user over a network and receives a live stream of the scene.
1 INTRODUCTION
Remote Support is highly interesting for the service
industry, as it can help field service technicians to
carry out their tasks more efficiently. Due to increas-
ing complexity and availability demands of plants and
products, quick intervention in case of failures, in-
volving highly specialized experts, is becoming a key
requirement. Remote Support enables on-site person-
nel, which is often rather universally trained than spe-
cialized, to obtain interactive assistance by globally
distributed experts. Supported by a combination of
technologies such as Remote Service, Video Confer-
encing and Augmented Reality, field service person-
nel can solve a broader range of tasks faster and more
efficiently. First steps towards this direction have
been taken within the ARVIKA project (Friedrich,
2004). In this case the augmentation was purely
marker-based, requiring scene preparation and limit-
ing the field of view of the on-site technician. The
approach presented in this paper better fits the needs
of the service industry, as it can be used in an un-
known environment without any preparation and does
not limit the operating range of the service technician.
This is achieved by using a learning-free markerless
tracking system, which is based on template-based
and feature-based tracking algorithms. The tracking
system can handle commonly occurring real-world
tracking conditions including partial occlusions, mo-
tion blur, fast object movement and changing lighting
conditions. A 3D-CAD model of the scene is not re-
quired. We use this tracking system in a remote sup-
port application, which allows a remote expert to help
a local user by providing appropriate augmentations
for objects in the scene. The remote support is real-
ized by streaming a live video to the expert who can
select regions in the image and choose from several
possible types of augmentations including text, im-
ages and drawings.
2 RELATED WORK
Markerless tracking methods comprise different ap-
proaches. The most common are template-based
tracking (Hager and Belhumeur, 1998; Baker and
Matthews, 2004) and feature-point-based tracking
(Lowe, 2004; Lepetit et al., 2005) since they are fast
and stable under many conditions. There also exist
tracking methods combining multiple visual tracking
627
Ladikos A., Benhimane S., Navab N. and Appel M. (2008).
MODEL-FREE MARKERLESS TRACKING FOR REMOTE SUPPORT IN UNKNOWN ENVIRONMENTS.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 627-630
DOI: 10.5220/0001071206270630
Copyright
c
SciTePress

cues such as lines, feature-points and texture (Vac-
chetti et al., 2004; Pressigout and Marchand, 2006;
Ladikos et al., 2007).
In particular the combination of template-based track-
ing and feature-based tracking gives robust results.
Template-based tracking works well for small inter-
frame displacements, image blur, oblique viewing an-
gles and linear illumination changes, while feature-
based tracking works well with occlusions and large
interframe displacements. Therefore, we based our
algorithm on combining template-based tracking and
feature-based tracking. For template-based tracking,
we use the ESM algorithm of (Benhimane and Malis,
2004) due to its high convergence rate and accuracy,
while the feature-based tracking is based on Harris
Corner points.
In (Ladikos et al., 2007) the authors assume that they
have a textured 3D-model of the object and that the
camera is calibrated. In our application we do not
have this information since we want to use it for in-
teractive tracking in unknown scenes with unknown
cameras. Our contributions therefore focus on mak-
ing this tracking approach work under the constraints
imposed by our application. To accommodate track-
ing in unknown scenes we parameterized the camera
motion using a homography instead of the pose in the
cartesian space. This is sufficient for our application
since we only want to superimpose labels over the ob-
jects. This simplifies the Jacobian so that we obtain a
significant speed increase for the tracking. We also
included an online illumination compensation by es-
timating the gain and the bias for the tracked pattern.
To accommodate interactivity we use a learning-free
SIFT-based initialization instead of a learning-based
Randomized Tree initialization.
Augmented Reality-based remote support has re-
ceived much attention in the past. However, most ex-
isting work has focused on the interaction (Barakonyi
et al., 2004) between the remote user and the local
user and very little work (Lee and H
¨
ollerer, 2006)
has been devoted to markerless tracking. Therefore,
most systems make use of fiducial markers or explicit
scene knowledge which precludes an ad-hoc use in
unknown environments. Our contribution is to use
a reference template for markerless tracking to avoid
drift and combine both template-based and feature-
based tracking to overcome problems with jittering,
fast object motion and partial occlusions.
3 THE TRACKING SYSTEM
Our tracking system combines template-based and
feature-based tracking. This design is based on sev-
eral simulations and experiments that were conducted
in order to determine the properties of both tracking
methods. Some of these experiments are presented
in the experimental section of this paper. The results
suggest that no single method can deal well with all
tracking situations occurring in practice. It is rather
the case that the two tracking approaches are com-
plementary. Therefore, efficiently combining those
methods yields robust and accurate tracking results.
In the remainder of this section, we will first discuss
the design of the tracking system and then go on to
describe each component in detail.
3.1 System Design
Once the initialization module, which uses SIFT de-
scriptors, has determined the pose of the object in
the current image, our algorithm adaptively switches
between template-based tracking and feature-based
tracking depending on the value of the Normalized-
Cross-Correlation (NCC) computed between a refer-
ence image of the object and the object’s appearance
in the current image. During template-based track-
ing, a low NCC score usually means that the object
is being occluded or that the interframe displacement
is outside the convergence radius of the minimization
algorithm. In both cases, feature-based approaches
give higher quality results. Therefore, the proposed
algorithm automatically switches over to the feature-
based tracking. As soon as the NCC score gets high
enough, it is safe to go back to template-based track-
ing. If the score remains low, the feature-based track-
ing is invoked as long as there are enough inlier points
for a stable pose estimation. If this is not the case, the
algorithm invokes the global initialization.
3.2 Initialization
The initialization is performed using SIFT descrip-
tors. The choice of SIFT descriptors over other ap-
proaches is based on the fact that they do not need
a learning phase and that they have been shown to
be very robust with respect to different image trans-
formations. The runtime performance of SIFT is not
real-time, but since it is only used for initialization
this is not a critical issue.
3.3 Template-based Tracking
We use the ESM algorithm to perform template-based
tracking because it enables us to achieve second-order
convergence at the cost of a first-order method. Given
the current image I and the reference image I
∗
of
a planar target, we are looking for the homography
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
628
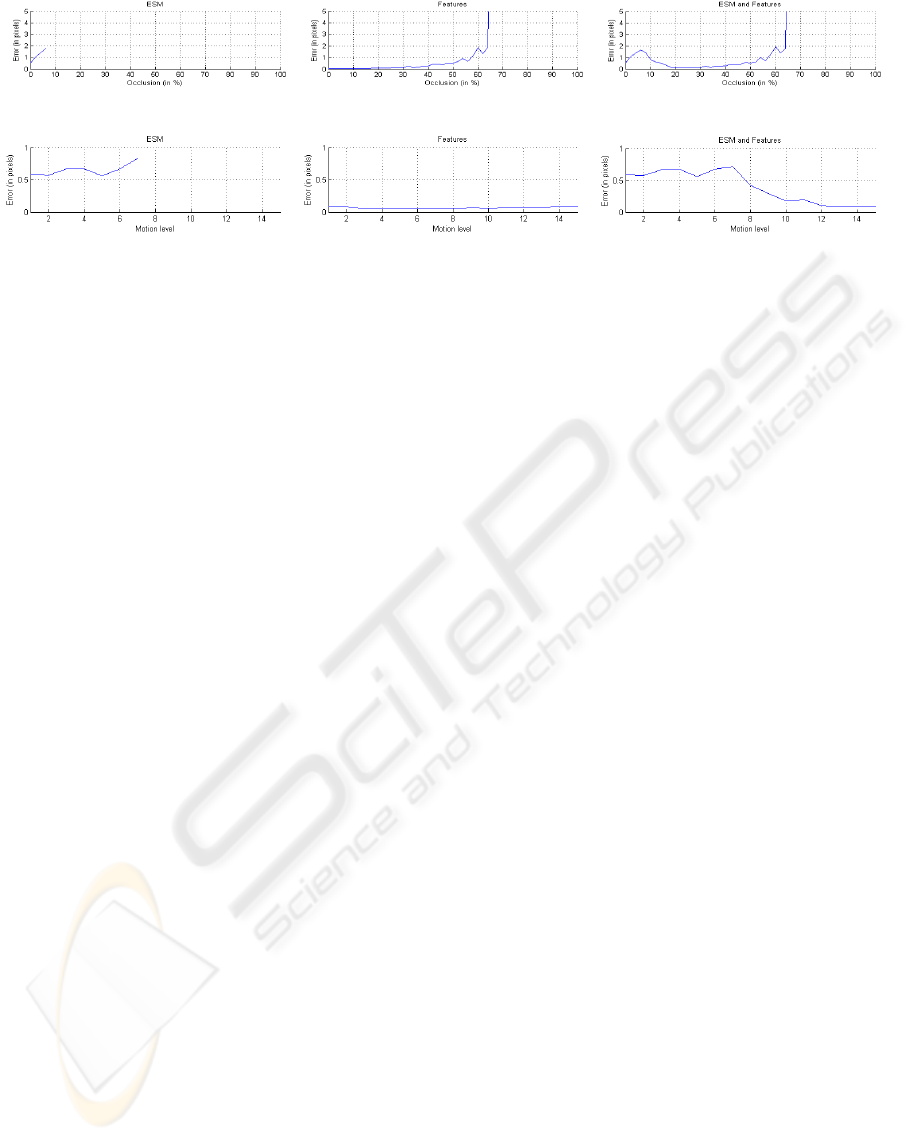
(a) Tracking accuracy under occlusions. Our method witches to feature-based tracking under significantocclusions.
(b) Tracking accuracy under fast motion. Our method adaptively switches between template- and feature-based tracking.
Figure 1: Tracking results on simulated sequences.
which transforms the reference image into the current
image. The ESM algorithm iteratively updates the ap-
proximation
b
H of the homography by finding the pa-
rameters x of the incremental homography H(x). In
addition, we also estimate an incremental gain α to
the current gain
b
α and an incremental bias β to the
current bias
b
β for the template in order to minimize
the photometric error. This allows the method to be
used with changing lighting conditions. The gain is
parametrized through the exponential function to im-
prove the conditioning of the Jacobian and to guar-
antee that it is always positive. The SSD-based cost
function to be minimized is:
∑
p
h
exp(
b
α + α)I
w
b
HH(x)p
+(
b
β+ β)− I
∗
(p)
i
2
(1)
where p are the pixel coordinates and w performs
the division by the homogeneous coordinate. In or-
der to speed up the optimization, we use a multi-scale
approach for optimizing the cost function.
3.4 Feature-based Tracking
Our feature-based tracking algorithm makes use of
Harris Corner points and NCC for matching. The
Harris features are extracted on the same reference
template used for tracking and matched to Harris
features found in the current image. However,
because NCC is not scale and rotation invariant, we
add an additional step to ensure that the changes in
pose between the reference template and the current
image are small. This is done by using the inverse
of the homography
b
H found in the previous frame to
warp the current image so that the NCC can still be
used as a similarity measure. The feature points are
then extracted in the warped image and the pose is
estimated using RANSAC.
4 THE REMOTE EXPERT
APPLICATION
We use the tracking algorithm presented in section
3 in a remote support application. The application,
called the Remote Expert, allows a user to receive in-
structions from a remote expert, which are augmented
onto objects in the scene.
The workflow of the application is as follows. First
the expert connects to the user’s machine to receive
a live video-stream. When the expert wants to add
an annotation to an object he can select a region in
the image and select either a text, a sketch or an im-
age augmentation. When selecting the region the ex-
pert application is requesting an uncompressed frame
at the full resolution from the worker, in order to se-
lect and send back the template in the actual resolu-
tion and quality of the input camera. The selected
region in the image and the augmentation are sent to
the user’s application, which starts tracking the ob-
ject using the reference template and augmenting it on
screen. For every frame the user’s application sends
the pose of the object determined by the tracking sys-
tem back to the expert application which uses this
pose to augment the video locally.
To reduce bandwidth requirements the video is en-
coded to MPEG-2 at a resolution of 320x240 pixels
and 15 fps independent of the actual size and frame
rate of the user’s camera. In order to keep the delay
low the tracking is performed on the user’s machine.
This also yields superior tracking results, because the
user can make use of the full resolution and speed of
the camera.
5 RESULTS
In order to evaluate both the tracking algorithm and
the remote support application, we performed two
MODEL-FREE MARKERLESS TRACKING FOR REMOTE SUPPORT IN UNKNOWN ENVIRONMENTS
629

sets of experiments. The first set was designed to test
the accuracy and the robustness of the tracking algo-
rithm while the second set was meant to evaluate the
Remote Expert application.
To test the robustness of the tracker we performed
several kinds of simulations, whose results are shown
in Figure 1. In all experiments the performance of
the ESM algorithm and the feature-based tracking by
themselves were compared to the combined approach.
The error was measured by computing the displace-
ment of the corner points of the template from their
true position after optimization. Apart from synthetic
Figure 2: Tracking results on a real-world sequence.
experiments, we also performed real-world tests. We
found that our algorithm can successfully deal with
partial occlusions, blur, oblique viewing angles and
low lighting conditions (see figure 2).
The Remote Support application was used in a remote
support scenario. Figure 3 shows some screenshots of
the Remote Expert application during the remote sup-
port session. The expert and the user are located at
two different locations and are connected over the In-
ternet. The user has a measuring device and a piece
of hardware and the remote expert assists him in per-
forming the measurement correctly. The user follows
the instructions given by the remote expert and fin-
ishes the experiment successfully.
Figure 3: Screenshots from the Remote Expert application.
6 CONCLUSIONS
We presented a complete system based on a real-time
markerless tracking algorithm which enables us to
perform Augmented Reality in a priori unknown en-
vironments containing approximately planar patches.
The presented system combines template-based and
feature-based tracking algorithms in a homography-
based model-free tracking framework and includes il-
lumination compensation as well as a learning-free
initialization procedure. This yields fast and robust
tracking results which overcomes the problems most
tracking algorithms have under real-world conditions,
including partial occlusions, motion blur, fast object
motion and changing lighting conditions. The remote
support application allows a remote expert to interact
with a local user by providing suitable augmentations
for objects in the scene without requiring markers or
knowledge about the scene.
In order to validate the proposed method, we per-
formed multiple tracking experiments on both syn-
thetic and real data. In addition, we evaluated the re-
mote expert application with a support scenario.
REFERENCES
Baker, S. and Matthews, I. (2004). Lucas-kanade 20 years
on: A unifying framework. IJCV, 56(3):221 – 255.
Barakonyi, I., Fahmy, T., and Schmalstieg, D. (2004). Re-
mote collaboration using augmented reality video-
conferencing. In Proceedings of the Conference on
Graphics Interface, pages 89–96.
Benhimane, S. and Malis, E. (2004). Real-time image-
based tracking of planes using efficient second-order
minimization. In IROS, pages 943–948.
Friedrich, W. (2004). ARVIKA - Augmented Reality f
¨
ur En-
twicklung, Produktion und Service. Publicis, first edi-
tion.
Hager, G. and Belhumeur, P. (1998). Efficient region track-
ing with parametric models of geometry and illumina-
tion. PAMI, 20(10):1025–1039.
Ladikos, A., Benhimane, S., and Navab, N. (2007). A real-
time tracking system combining template-based and
feature-based approaches. In VISAPP.
Lee, T. and H
¨
ollerer, T. (2006). Viewpoint stabilization
for live collaborative video augmentations. In ISMAR,
pages 241–242.
Lepetit, V., Lagger, P., and Fua, P. (2005). Randomized
trees for real-time keypoint recognition. In CVPR,
pages 775–781.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. IJCV, 60(2):91–110.
Pressigout, M. and Marchand, E. (2006). Hybrid tracking
algorithms for planar and non-planar structures sub-
ject to illumination changes. In ISMAR, pages 52–55.
Vacchetti, L., Lepetit, V., and Fua, P. (2004). Combining
edge and texture information for real-time accurate 3d
camera tracking. In ISMAR, pages 48–57.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
630
