
NEW INVARIANT DESCRIPTORS BASED ON THE MELLIN
TRANSFORM
S. Metari
Université de Sherbrooke, 2500 boulevard de l’Université, Sherbrooke, Québec, Canada, J1K 2R1
François Deschênes
Université du Québec en Outaouais, 283 boulevard Alexandre-Taché, Gatineau, Québec, Canada, J8X 3X7
Keywords:
Radiometric invariants, Combined invariants, Moments, Mellin transform, Point Spread Function.
Abstract:
In this paper we introduce two new classes of radiometric and combined radiometric-geometric invariant
descriptors. The first class includes two types of radiometric descriptors. The first type is based on the
Mellin transform and the second one is based on central moments. Both descriptors are invariant to contrast
changes and to convolution with any kernel having a symmetric form with respect to the diagonals. The
second class contains two subclasses of combined descriptors. The first subclass includes central-moment
based descriptors invariant simultaneously to translations, to uniform and anisotropic scaling, to stretching, to
contrast changes and to convolution. The second subclass includes central-complex-moment based descriptors
invariant simultaneously to similarity transformation and to contrast changes. We apply those invariants to the
matching of geometrically transformed and/or blurred images.
1 INTRODUCTION
In pattern analysis, one important research axis is the
analysis and characterization of objects and patterns
corrupted by radiometric and/or geometric degrada-
tions. Real images can reveal geometric distortions
as well as photometric degradations. Two important
types of factors can be at the origin of those degra-
dations. First, those that originate from the imaging
system. They might be due to defects or limitations
of the imaging device such as diffraction, bad im-
age sensor, limited depth of field, limited dynamic
range, etc. Second, the conditions under which the
image is taken, i.e. ambient illumination, weather
conditions, viewpoint position, etc. Several research
fields are interested in the characterization of the ideal
image from the acquired one by neither having re-
course to restoration nor to geometric standardiza-
tion as those two processes are often ill-posed prob-
lems (Katsaggelos, 1991). The obtained results may
thus be not unique as they depend on the problem
formulation. Moreover the algorithmic complexity
may be high. To solve those problems, we are in-
terested by invariant descriptors that are calculated
from the image functions and allow the identifica-
tion and characterization of the ideal scene image re-
gardless of the photometric and/or geometric degra-
dations. In the literature we can find four major de-
scriptor types, namely, algebraic descriptors, visual
descriptors, transform coefficient descriptors and sta-
tistical descriptors. Our research work is classified in
the category of statistical descriptors.
In this paper, we introduce two new classes of in-
variant descriptors. The first class includes radiomet-
ric descriptors and the second one contains combined
radiometric-geometric descriptors. The proposed in-
variants are inspired by a new relationship established
between the Mellin transforms of all of the original
image, the degraded image, and the convolution ker-
nel. They have a high discriminant power in matching
of geometrically transformed and/or radiometrically
degraded images and their algorithmic complexities
are low. In the rest of this paper we proceed as fol-
lows. In section 2, we give a brief synopsis of litera-
ture. In section 3, we introduce a new class of radio-
metric descriptors. Section 4 is devoted to the class of
combined radiometric-geometric descriptors. Finally,
experimental results are given in section 5.
13
Metari S. and Deschênes F. (2008).
NEW INVARIANT DESCRIPTORS BASED ON THE MELLIN TRANSFORM.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 13-21
DOI: 10.5220/0001072200130021
Copyright
c
SciTePress

2 RELATED WORK
Two main degradation types are tackled in the field of
analysis and interpretation of degraded images based
on statistical invariant descriptors. In the case of ge-
ometric degradations, the author in (Hu, 1962) intro-
duces the first class of statistical moment invariants
based on the theory of algebraic invariants. The pro-
posed descriptors are invariant to translation, rotation
and scaling, and are used in the recognition of de-
graded planar objects. Authors in (Flusser and Suk,
1993) have developed the so called affine moment
invariants, that is image descriptors that are invari-
ant under general affine transformation. These de-
scriptors are based on central moments and are used
for the recognition of patterns and objects degraded
by a general affine transformation. Several other re-
searchers (Belkasim et al., 1991), (Reiss, 1991), (Teh
and Chin, 1988) tackled the subject of moment based
invariant descriptors for the recognition of geometri-
cally degraded images.
For radiometric degradations, very little research
work is interested in this topic. The research work
of Flusser and his research group (Flusser et al.,
1995), (Flusser and Suk, 1997), (Flusser and Suk,
1998) is the first significant contribution in this do-
main. They have developed new classes of radiomet-
ric descriptors invariant to blur degradations. The pro-
posed descriptors are based on central moments. They
haveseveral application fields, such as the recognition
of blurred images, the recognition and classification
of 1-D degraded signals and the template matching
on satellite image functions. Authors in (Stern et al.,
2002) developed two new moment based methods for
the recognition of motion blurred images.
In extension to previous work, Flusser and his
research group (Flusser and Zitová, 1999), (Flusser
et al., 2003), (Suk and Flusser, 2003) have developed
new classes of combined invariant descriptors, that is
descriptors that are simultaneously invariant to both
geometric and radiometric degradations. The pro-
posed descriptors are based on central and complex
moments and are used in the recognition of affine
transformed and blurred images, in template match-
ing on blurred and rotated images, etc. In this line
of thoughts, the authors in (Van Gool et al., 1996)
propose a new class of combined affine radiometric
invariants. These descriptors are used for the recog-
nition of affine transformed and photometrically de-
graded gray level images. Authors in (Mindru et al.,
1999) introduce the so called generalized color mo-
ments for the characterization of the multispectral na-
ture of data in a limited area of the image. The pro-
posed descriptors are used in the recognition of pla-
nar color patterns regardless of the viewpoint and il-
lumination. A more detailed survey can be found
in (Flusser, 2006) and (Flusser, 2007). In what fol-
lows we introduce our first class of radiometric fea-
tures.
3 RADIOMETRIC INVARIANTS
In this section, we propose a new set of Mellin-
transform based descriptors invariant simultaneously
to uniform scaling, to contrast changes and to blur
degradations that can be modelled by any convolu-
tion kernel h having a symmetric form with respect
to the diagonals, i.e. h(x,y) = h(y,x). Then, in-
spired by those invariant descriptors we introduce a
new central-moment based descriptor which is simul-
taneously invariant to translations, to uniform scaling,
to contrast changes and to convolution. Note that the
symmetry constraint of the convolution kernel is not
a severe limitation for the applicability of our invari-
ant descriptors since the majority of convolution ker-
nels used to model optical blur are symmetric with
respect to the diagonals (e.g., Gaussian and pillbox
filters (Chaudhuri and Rajagopalan, 1999)) as well
as those used to approximate the Atmospheric Point
Spread Function APSF which models the atmospheric
veil on images (Metari and Deschênes, 2007a).
3.1 Radiometric Invariant based on the
Mellin Transform
The Mellin integral transform of a function f(x, y) is
defined as (Zayed, 1996):
M ( f (x,y))(s,v) =
+∞
Z
0
+∞
Z
0
x
s−1
y
v−1
f(x,y)dxdy, (1)
with s,v ∈ C. The idea behind the elaboration of
our first radiometric invariant feature is based on two
properties of the Mellin transform and Mellin convo-
lution. The first one mentions that the Mellin convo-
lution in R
+
is equivalent to ordinary convolution in
R (Korevaar, 2004): Let g, f and h be three functions
defined and integrable on the reals, the ordinary con-
volution product of f with h is given by:
g(x) = ( f ∗ h)(x) =
+∞
Z
−∞
f(x− t)h(t)dt. (2)
By carrying out the following change of variables
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
14

x = ln(x
′
) and t = ln(t
′
), we obtain:
(g◦ ln)(x
′
) = ( f ∗ h)(ln(x
′
)),
=
+∞
Z
0
f(ln(x
′
) − ln(t
′
))h(ln(t
′
))
dt
′
t
′
,
=
+∞
Z
0
( f ◦ ln)(
x
′
t
′
)(h◦ ln)(t
′
)
dt
′
t
′
,
= (( f ◦ ln) ∗
Mel
(h◦ ln))(x
′
), (3)
with ∗
Mel
denoting the Mellin convolution product.
Thus, Mellin convolution in R
+
is equivalent to ordi-
nary convolution in R.
The second one reveals that the Mellin transform
of the Mellin convolution product of two functions is
equal to the product of the Mellin transforms of these
functions (Davies, 2002): Let f and h be two func-
tions defined and integrable on the positive reals, the
Mellin transform of the Mellin convolution product of
f and h is given by:
M (( f ∗
Mel
h)(x))(s) =
+∞
Z
0
x
s−1
+∞
Z
0
f(t)h
x
t
dt
t
dx,
=
+∞
Z
0
f(t)
t
+∞
Z
0
x
s−1
h
x
t
dxdt,
=
+∞
Z
0
f(t)
t
+∞
Z
0
(tx)
s−1
h(x)tdxdt,
=
+∞
Z
0
t
s−1
f(t)dt
+∞
Z
0
x
s−1
h(x)dx,
= M ( f(x))(s)M (h(x))(s). (4)
It results from the above mentioned properties the
new relationship shown in equation (6). Let us con-
sider the functions g, f and h related by the following
relationship:
g(x,y) = f (x,y)∗ h(x,y), (5)
where ∗ is the ordinary convolution operator.
The Mellin transform of g can thus be obtained as
follows:
M (g) = M ( f ∗ h) = M ( f)M (h). (6)
Proof: From equation (3), we have:
(g◦ ln)(x
′
) = (( f ◦ ln) ∗
Mel
(h◦ ln))(x
′
). (7)
Applying the Mellin transform to equation (7), we ob-
tain:
M ((g◦ ln)(x
′
))(s) = M ((( f ◦ ln) ∗
Mel
(h◦ ln))(x
′
))(s),
M ((g◦ ln)(x
′
)
| {z }
g(x)
)(s) = M (( f ◦ ln)(x
′
)
| {z }
f(x)
)(s)
× M ((h◦ ln)(x
′
)
| {z }
h(x)
)(s),
M (g(x))(s) = M ( f(x))(s)M (h(x))(s). (8)
In addition to this, as we will show below, Mellin
transform of order (s,v) of a symmetric filter with re-
spect to the diagonals is equal to its Mellin transform
of order (v,s). The theorem and the proof of the pro-
posed invariant descriptor are thus given by:
Theorem 1: The radiometric invariant descriptor
k
f
(s,v) of the image function f(x,y) is defined as:
k
f
(s,v) =
M ( f(x,y))(s,v)
M ( f(x,y))(v,s)
, s,v ∈ N. (9)
The proposed descriptor k
f
(s,v) is invariant to uni-
form scaling, to contrast changes and to convolu-
tion with any kernel h having a symmetric form with
respect to the diagonals, i.e. k
η( f∗h)(rx,ry))
(s,v) =
k
f(x,y)
(s,v), with η is a positive constant number and
r denotes the uniform scaling factor.
3.1.1 Invariance to Convolution
In the case of a shift invariant imaging system the ac-
quired image g(x,y) is the result of the convolution
product of a clear image f(x,y) with a kernel h(x, y)
where models the Point Spread function PSF of the
imaging system (cf. equation (5)). Applying the pro-
posed invariant k(s,v) to equation (5) and using the
Mellin transform property (equation (6)), we obtain:
k
g
(s,v) =
M (g(x,y))(s,v)
M (g(x,y))(v,s)
,
=
M ( f(x,y))(s,v)M (h(x,y))(s,v)
M ( f(x,y))(v, s)M (h(x,y))(v,s)
,
the ratio
M (h(x,y))(s,v)
M (h(x,y))(v,s)
= 1 according to the following
proof:
M (h(x,y))(s,v) =
+∞
Z
0
+∞
Z
0
x
s−1
y
v−1
h(x,y)dxdy,
by making the following change of variables x = y and
y = x, we obtain:
=
+∞
Z
0
+∞
Z
0
∂(x,y)
∂(y,x)
| {z }
=1
y
s−1
x
v−1
h(y, x)dydx,
NEW INVARIANT DESCRIPTORS BASED ON THE MELLIN TRANSFORM
15

where
∂(x,y)
∂(y,x)
denotes the jacobian of the transforma-
tion. If we suppose that h is a symmetric kernel with
respect to the diagonals, i.e. h(x,y) = h(y,x) then we
have:
M (h(x,y))(s,v) =
+∞
Z
0
+∞
Z
0
x
v−1
y
s−1
h(x,y)dxdy,
= M (h(x,y))(v,s). (10)
Thus,
k
g
(s,v) =
M ( f(x,y))(s,v)
M ( f (x,y))(v,s)
= k
f
(s,v). (11)
3.1.2 Invariance to Uniform Scaling and to
Contrast Changes
Following a global contrast change and a uniform
scaling of the image function f(x,y), the Mellin trans-
form M ( f
′
(u,w)) of the resulting image function
f
′
(u,w) is related to Mellin transform M ( f(x,y)) of
the original image function f(x,y) by what follows:
M ( f
′
(u,w)) =
+∞
Z
0
+∞
Z
0
u
s−1
w
v−1
f
′
(u,w)dudw,
=
+∞
Z
0
+∞
Z
0
(rx)
s−1
(ry)
v−1
ηf (x,y)rdxrdy,
= ηr
s+v
M ( f(x,y)), (12)
with η a positive constant number and r the uniform
scaling factor. Applying k(s,v) to a function f
′
(u,w),
we obtain:
k
f
′
(u,w)
(s,v) =
ηr
s+v
M ( f(x,y))(s,v)
ηr
v+s
M ( f(x,y))(v, s)
,
= k
f(x,y)
(s,v). (13)
Thanks to the above proofs we can conclude that the
proposed feature is simultaneously invariant to uni-
form scaling, to contrast changes and to convolution
with any diagonal-symmetric kernel.
3.2 Invariant Descriptor based on
Central Moments
Inspired by previous invariants, let us now propose a
new set of radiometric invariants based on central mo-
ments. Specifically, if we replace each occurrence of
the Mellin transform of order (s, v) by one central mo-
ment of order (s+v) in equation (9), we obtain a new
set of image descriptors invariant simultaneously to
vertical and horizontal translations, to uniform scal-
ing, to contrast changes as well asto blur degradations
that can be modelled by any kernel having a symmet-
ric form with respect to the diagonals.
Theorem 2: The descriptor P
f
(s,v) is given by:
P
f
(s,v) =
µ
f(x,y)
sv
µ
f(x,y)
vs
, x,y ∈ R
+
, (14)
where s,v ∈ N, µ
f(x,y)
sv
is the (s + v)th order central
moment of a function f(x,y) and is defined as:
µ
f(x,y)
sv
=
+∞
Z
−∞
+∞
Z
−∞
(x− x)
s
(y− y)
v
f(x, y)dxdy, (15)
with x = m
f
10
/m
f
00
, y = m
f
01
/m
f
00
, representing the co-
ordinates of the mass center of the function f(x,y).
The functional m
f
sv
is the geometric moment of order
(s+ v) of the image function f(x,y) and is given by:
m
f
sv
=
+∞
Z
−∞
+∞
Z
−∞
x
s
y
v
f(x, y)dxdy, s, v ∈ N. (16)
Since the descriptor P(s,v) is based on central mo-
ments, it is trivial to prove that it is invariant to both
horizontal and vertical translations. The proofs of the
descriptor invariance with respect to uniform scaling,
contrast changes and to convolution are identical to
the ones of the descriptor k(s,v). Note that without
loss of generality we suppose that the gravity center
of the image function coincides with the origin (0,0).
4 COMBINED RADIOMETRIC
GEOMETRIC INVARIANTS
In this section, we introduce a new class of combined
invariant features. We start by introducing the com-
bined invariant based on central moments.
4.1 Combined Descriptor based on
Central Moments
In this subsection, we propose a new set of central-
moment based descriptors invariant simultaneously to
horizontal and vertical translations, to uniform and
anisotropic scaling, to stretching, to contrast changes
and to convolution with any diagonal-symmetric ker-
nel.
Theorem 3: The combined descriptor B(s,v) is
given by:
B
f
(s,v) =
µ
f(x,y)
sv
µ
f(x,y)
vs
×
µ
f(x,y)
v+n,s+n
µ
f(x,y)
s+n,v+n
, x,y ∈ R
+
, (17)
with s,v ∈ N and n ∈ N
∗
. One can easily notice that
B
f
(s,v) is a combination of the radiometric invari-
ant descriptor P
f
(s,v) for different orders (s,v), i.e.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
16

B
f
(s,v) = P
f
(s,v) × P
f
(v + n, s + n). We chose to
build the combined descriptor B
f
(s,v) based on the
radiometric descriptor P
f
(s,v) because of its invari-
ance to horizontal and vertical translations, to uniform
scaling, to contrast changes as well as to convolution.
In what follows, we show the invariance of B
f
(s,v) to
anisotropic scaling and to stretching.
4.1.1 Anisotropic Scaling Invariance
Anisotropic scaling is given by (Jahne, 2005):
u = rx,
w = ty,
with r and t the directional scale factors. Following
an anisotropic scaling of the function f(x,y), µ
f
′
(u,w)
sv
is related to µ
f(x,y)
sv
by what follows:
µ
f
′
(u,w)
sv
=
+∞
Z
−∞
+∞
Z
−∞
u
s
w
v
f
′
(u,w)dudw,
=
+∞
Z
−∞
+∞
Z
−∞
(rx)
s
(ty)
v
f(x,y)rdxtdy,
= r
s+1
t
v+1
µ
f(x,y)
sv
. (18)
Applying the combined invariant B(s,v) to a function
f
′
(u,w), we obtain:
B
f
′
(u,w)
(s,v) =
r
s+1
t
v+1
µ
f(x,y)
sv
r
v+1
t
s+1
µ
f(x,y)
vs
r
v+n+1
t
s+n+1
µ
f(x,y)
v+n,s+n
r
s+n+1
t
v+n+1
µ
f(x,y)
s+n,v+n
,
= B
f(x,y)
(s,v). (19)
The above proof allows us to conclude that the com-
bined feature is invariant to anisotropic scaling.
4.1.2 Stretching Invariance
To prove the invariance of B
f
(s,v) to stretching, we
just haveto replace the factor t by
1
r
in the aboveproof
(cf. equations (18) and (19)).
All of these proofs allow us to confirm the invari-
ance of our combined descriptors B(s,v) to horizontal
and vertical translations, to uniform and anisotropic
scaling, to stretching, to contrast changes and to con-
volution.
4.2 Combined Feature based on Central
Complex Moments
In this section, we introduce a new class of combined
features based on central complex moments. The pro-
posed features are invariant simultaneously to simi-
larity transformation and to contrast changes. Note
that the similarity transformation includes horizontal
and vertical translations, rotation and uniform scaling
(Zisserman and Hartley, 2003). We start by giving
some mathematical definitions.
Central Complex Moment: The central complex
moment κ
f
pq
of order (p+q) of the function f(x,y) is
defined as:
κ
f
pq
=
+∞
Z
−∞
+∞
Z
−∞
((x− x
c
) + i(y− y
c
))
p
× ((x− x
c
) − i(y− y
c
))
q
f(x,y)dxdy, (20)
with p,q ∈ N, (x
c
,y
c
) the coordinates of the centroid
of the image function f(x,y) and i the imaginary unit.
In polar coordinates, the central complex moment κ
f
pq
is given by:
κ
f
pq
=
+∞
Z
0
2π
Z
0
r
p+q+1
e
i(p−q)θ
f(r, θ)dθdr. (21)
Theorem 4: The invariant descriptor Z
f
(p,q) of the
image function f(x,y) is given by:
Z
f
(p,q) =
κ
f(x,y)
pq
κ
f(x,y)
qp
×
κ
f(x,y)
q+n,p+n
κ
f(x,y)
p+n,q+n
, n ∈ N
∗
. (22)
Proofs of the invariance of Z(p,q) to the above men-
tioned geometric-radiometric degradations are given
in what follows.
4.2.1 Translation Invariance
The invariance of the feature Z(p,q) to horizontal and
vertical translations is trivial to prove as the central
complex moment is invariant to translations by defi-
nition.
4.2.2 Rotation - Contrast Change Invariance
Let g be a rotated (around the origin) and contrast
changed version of the image function f , i.e. g(r,θ) =
ηf(r, θ + α) where α is the angle of rotation and η is
a positive constant number. The central complex mo-
ments κ
g
pq
of the image function g is related to the
central complex moment κ
f
pq
of the original image
function f by the following equation:
κ
g
pq
= ηe
−i(p−q)α
κ
f
pq
. (23)
NEW INVARIANT DESCRIPTORS BASED ON THE MELLIN TRANSFORM
17
Applying Z(p,q) to the image function g(x, y), we ob-
tain:
Z
g
(p,q) =
ηe
−i(p−q)α
κ
f
pq
ηe
−i(q− p)α
κ
f
qp
×
ηe
−i(q− p)α
κ
f
q+n,p+n
ηe
−i(p−q)α
κ
f
p+n,q+n
,
=
κ
f
pq
κ
f
qp
×
κ
f
q+n,p+n
κ
f
p+n,q+n
= Z
f
(p,q). (24)
4.2.3 Uniform Scaling Invariance
Let g be a scaled version of the original image func-
tion f, i.e. g(r,θ) = f(βr,θ), where β is the parameter
of the uniform scaling. The central complex moment
κ
g
pq
is related to κ
f
pq
by the following equation:
κ
g
pq
= β
−(p+q+2)
κ
f
pq
. (25)
Applying the descriptor Z(p,q) to the image function
g, we obtain:
Z
g
(p,q) =
β
−(p+q+2)
κ
f
pq
β
−(q+p+2)
κ
f
qp
×
β
−(q+p+2(n+1))
κ
f
q+n,p+n
β
−(p+q+2(n+1))
κ
f
p+n,q+n
,
=
κ
f
pq
κ
f
qp
×
κ
f
q+n,p+n
κ
f
p+n,q+n
= Z
f
(p,q). (26)
According to the above proofs, we conclude that
the proposed feature Z(p,q) is invariant simultane-
ously to similarity transformation (translations, rota-
tion, uniform scaling) and to contrast changes.
5 EXPERIMENTAL RESULTS
In this section, we carry out a number of tests in order
to express the discrimination power of our invariant
descriptors. We start by applying the invariant based
on the Mellin transform. Then, we show results of
the radiometric descriptor based on central moments.
Finally, we show the experimental results related to
the combined invariants.
5.1 Mellin-Transform based Descriptor
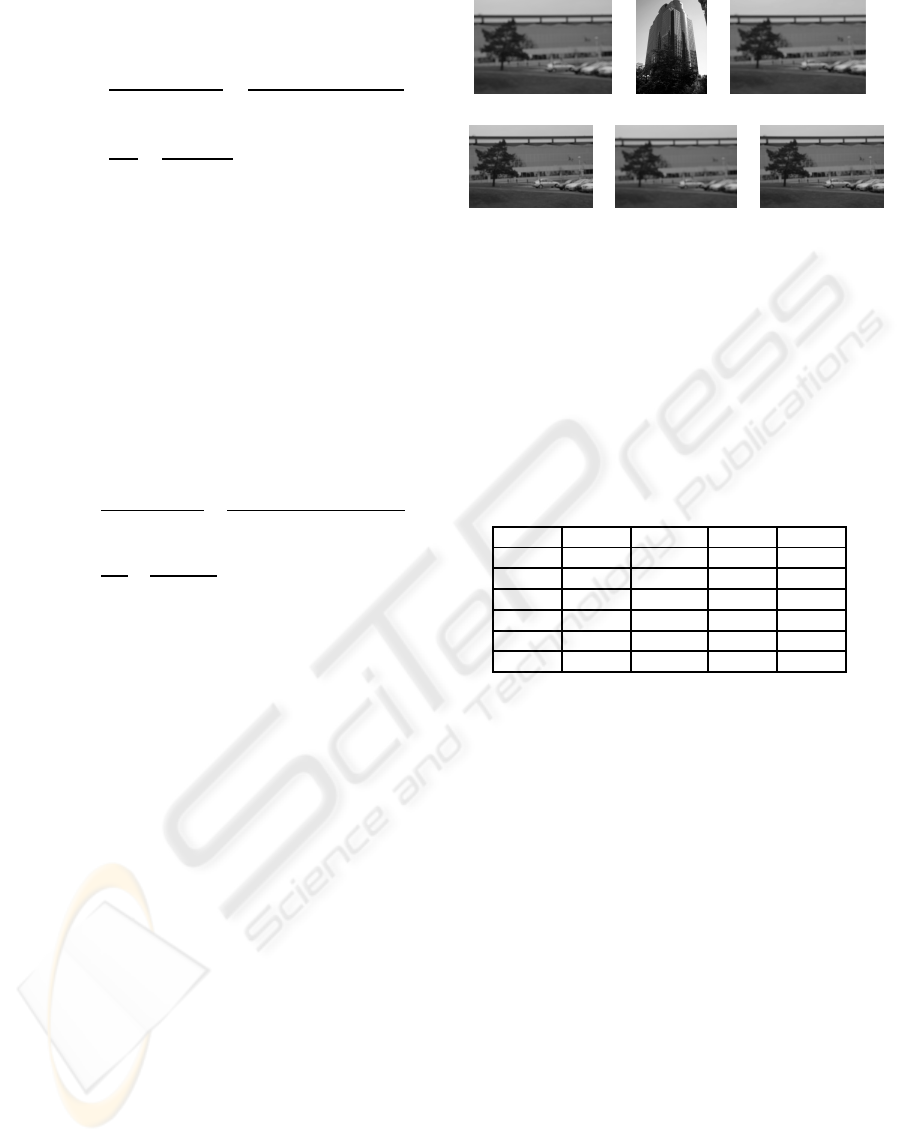
To validate our invariant descriptor in practical sit-
uations we carried out tests on real images. Figure
1 shows real images (a,c-f) which were taken with a
digital camera (Canon 1D professional) with different
parameter settings. The radiometric invariant feature
k(s,v) is applied to real images in Figure 1. Experi-
mental results are given in Table 1.
Results in Table 1 show that for any order (s,v) the
numerical values obtained by applying the invariant
(a) (b) (c)
(d) (e) (f)
Figure 1: a, c-f: real images of the same scene with different
blur degrees. b- foreign image.
descriptor k(s,v) to images (a) and (c-f) are almost
identical but are different from the numerical value
obtained with image (b). Obtained results confirm the
invariance of the descriptor k(s,v) to both convolution
and contrast changes.
Table 1: Results of the application of the radiometric invari-
ant descriptor k(s,v) to real images of Figure 1.
k(6, 7) k(4, 12) k(7,2) k(10, 6)
Image a 1.55926 32.92205 0.09745 0.17464
Image b 0.87445 0.277227 1.41440 1.92620
Image c 1.55775 32.62386 0.09713 0.17579
Image d 1.55791 32.70831 0.09841 0.17529
Image e 1.55093 31.83843 0.10427 0.17771
Image f 1.54944 31.62592 0.10479 0.17840
With an aim of comparing our invariant feature to the
state of the art and to the most related feature, we car-
ried out tests on images using the radiometric feature
C(s,v) developed by Flusser and Suk in (Flusser and
Suk, 1998). Results given in Table 2 provide an ex-
ample of those tests using images in Figure 1. We
may observe that for any order (s,v) the distance be-
tween the invariant descriptors of two degraded im-
ages of the same scene is smaller with the proposed
feature k(s,v) than the ones provided by C(s,v). For
instance, let us consider the order (6,7). Following
a data normalization, i.e., by dividing all descriptor
values (related to the original image and to its de-
graded versions) by the descriptor value of the orig-
inal image, the standard deviation of our results is
equal to 0.0029, while the one obtained with C(s,v)
is equal to 0.0523. Computing times (relative to im-
age (a) of Figure 1) of our invariant feature is equal to
0.047 s while the one with C(s,v) is equal to 31.078 s.
Note that computing time is evaluated in seconds. We
hence notice that, for any order (s,v), computing time
of our invariant feature is quite low. Finally notice
that k(s,v) can be computed for any values of (s,v),
including even values.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
18
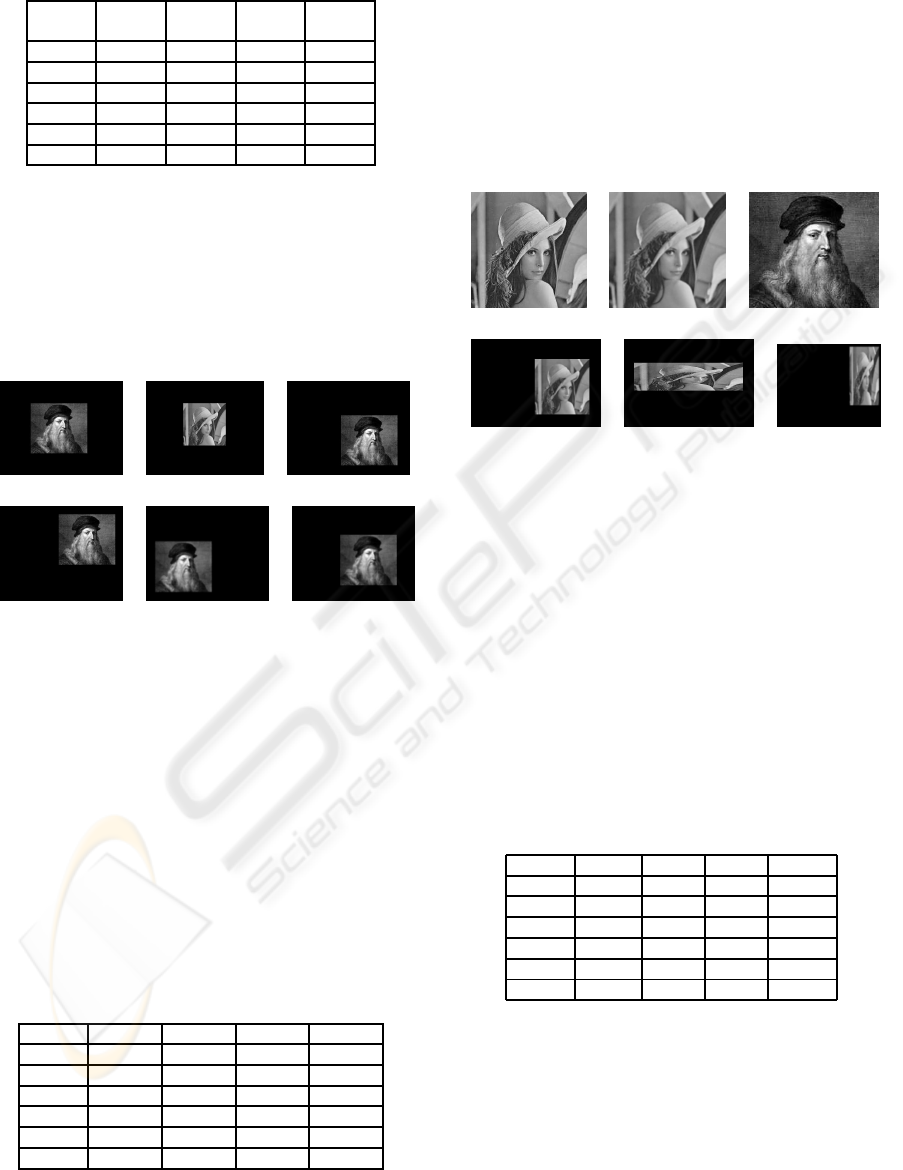
Table 2: Results obtained using Flusser and Suk feature.
C
f
(6,7) C(4,12) C
f
(7,2) C(10,6)
[10
−44
] [10
−31
]
Image a -7.7130 0 (n/a) 5.7757 0 (n/a)
Image b 4367.96 0 (n/a) 155.93 0 (n/a)
Image c -7.0798 0 (n/a) 5.7263 0 (n/a)
Image d -6.9568 0 (n/a) 5.5082 0 (n/a)
Image e -7.7330 0 (n/a) 5.7717 0 (n/a)
Image f -7.1183 0 (n/a) 5.5061 0 (n/a)
5.2 Radiometric Descriptors based on
Central Moments
In what follows, we apply the invariant descriptor
P(s,v) to images in Figure 2.
(a) (b) (c)
(d) (e) (f)
Figure 2: First row: a- original image, b- foreign image
(lena), c- contrast change of translated image. Second row:
d- translated images, e- translated and blurred image (filter
size = 7 × 7), f- contrast change of translated and blurred
image.
From Table 3, we notice that the numerical values of
the invariant descriptor P(s,v) relative to images (a)
and (c-f) are almost identical but are different from the
one of image (b) as expected. Obtained results con-
firm the invariance of the descriptor P(s,v) to contrast
changes, to blur degradations as well as to horizontal
and vertical translations.
Table 3: Results obtained by applying the invariant descrip-
tor P(s,v) to images of Figure 2.
P(4,3) P(11,1) P(9, 2) P(7,2)
Image a 0.01999 -0.40269 2.76839 6.74357
Image b -3.30720 0.30403 -0.40323 -0.36359
Image c 0.01706 -0.40277 2.77025 6.87348
Image d 0.01999 -0.40269 2.76839 6.74357
Image e 0.02040 -0.39920 2.81426 6.89165
Image f 0.01868 -0.40375 2.76167 6.80592
5.3 Combined Descriptor based on
Central Moments
In this subsection, we apply the combined invariant
B(s,v) to images in Figure 3. Note that Image (f) in-
cludes at the same time, vertical and horizontal trans-
lations, stretching, uniform scaling, contrast change
and blur degradation. Experimental results are given
in Table 4.
(a) (b) (c)
(d) (e) (f)
Figure 3: a- clear image, b- resized and blurred image, c-
foreign image, d- translated and blurred image, e- stretched
and translated image, f- contrast change of geometric de-
graded and blurred image (filter size = 11× 11).
According to Table 4, we notice that for any order
(s,v), the numerical values of the original image (Fig-
ure 3.a) and its degraded versions (Figure 3.b,d-f) are
almost identical but are different from the one of the
foreign image (Figure 3.c). The combined invariant
descriptor B(s,v) was tested for several orders and
the obtained results express its invariance to the above
mentioned radiometric and geometric degradations.
Table 4: Experimental results of the application of the com-
bined invariant B(s,v) to images of Figure 3.
B(2,3) B(3,6) B(8,5) B(5,15)
Image a 9.8918 0.0830 12.021 -0.3110
Image b 9.8666 0.0835 11.936 -0.3001
Image c -0.0007 109.26 0.0419 3.2301
Image d 9.8277 0.0841 11.815 -0.2860
Image e 10.379 0.0782 12.725 -0.3207
Image f 9.7072 0.0816 12.626 -0.3204
5.4 Invariant Descriptor based on
Central Complex Moments
In this subsection we evaluate the discrimination
power of the descriptor based on central complex mo-
ments. For this purpose we apply Z(s,v) to an image
NEW INVARIANT DESCRIPTORS BASED ON THE MELLIN TRANSFORM
19
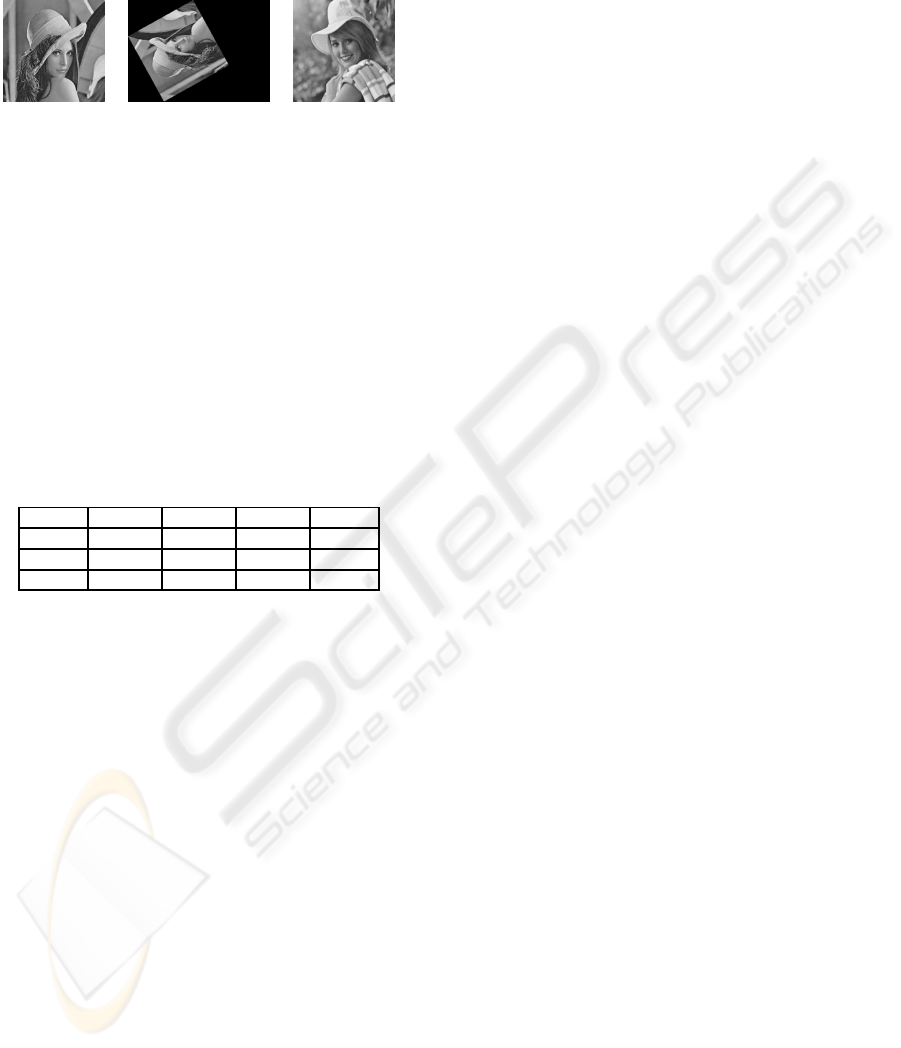
which includes at the same time vertical and horizon-
tal translations, rotation, uniform scaling and contrast
change (cf. Figure 4.b). Note that the invariant feature
(a) (b) (c)
Figure 4: a- original image, b- contrast change of similarity
transformed image, c- foreign image.
values shown in Table 5 correspond to the multiplica-
tion of the real and imaginary parts of Z(s,v). This
representation was chosen since it has experimentally
proven to provide a high discrimination power. It is
obviously not unique, other representations can also
be used. As can be seen from the table, for all of the
orders, the values of Z(s,v) related to images (a) and
(b) are almost identical but are different from the one
related to the foreign image (c), as expected.
Table 5: Results of the application of the combined invariant
Z(s, v) to images of Figure 4.
Z
2,11
Z
3,7
Z
6,5
Z
8,5
Image a 0.04807 0.00905 0.00691 0.04281
Image b 0.05276 0.00944 0.00645 0.03912
Image c -0.02320 -0.00229 -0.00105 0.15769
Obtained results express the invariance of Z(s,v) to
similarity transformation and to contrast changes.
Note that interested readerscan find in (Metari and
Deschênes, 2007b) a detailed comparisons made be-
tween the three above mentioned descriptors and the
most widely used descriptors in the literature.
6 CONCLUSIONS
In this paper, we introduced two new classes of invari-
ant features. The first class includes two radiometric
features. The first one is based on the Mellin trans-
form and the second one is based on central moments.
Both radiometric descriptors are invariant to radio-
metric degradations that can be modelled by convo-
lution as well as to global contrast changes and uni-
form scaling. The second class includes two com-
bined invariant features. The combined descriptors
based on central moments is invariant simultaneously
to all of the following transformations : both horizon-
tal and vertical translations, uniform and anisotropic
scaling, stretching, contrast changes and degradations
that can be modelled by convolution. The combined
features based on central complex moments are in-
variant simultaneously to similarity transformation
(translations, rotation, uniform scaling) and to con-
trast changes. These invariant features have been val-
idated experimentally. All of the results confirm that
they provide a high discrimination power at a low
computing cost. They can be used for the recognition
and classification of geometrically and/or radiometri-
cally degraded images.
ACKNOWLEDGEMENTS
This work is partially supported by the Natural Sci-
ences and Engineering Research Council of Canada
(NSERC) research funds.
REFERENCES
Belkasim, S. O., Shridhar, M., and Ahmadi, M. (1991).
Pattern recognition with moment invariants - a com-
parative study and new results. Pattern Recognition,
24(12):1117–1138.
Chaudhuri, S. and Rajagopalan, A. N. (1999). Depth
from Defocus: A Real Aperture Imaging Approach.
Springer Verlag.
Davies, B. (2002). Integral Transforms and their Applica-
tions - Third edition. Springer.
Flusser, J. (2006). Moment invariants in image analysis. In
Proceedings of the International Conference on Com-
puter Science. ICCS 2006, pages 196–201.
Flusser, J. (2007). Moments and Moment Invariants in
Image Analysis. In Proceedings of the International
Conference on Image Processing (to appear). San An-
tonio, Texas, USA. September 16-19.
Flusser, J., Boldya, J., and Zitová, B. (2003). Moment forms
invariant to rotation and blur in arbitrary number of
dimensions. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 25(2):234–246.
Flusser, J. and Suk, T. (1993). Pattern Recognition by Affine
Moment Invariants. Pattern Recognition, 26(1):167–
174.
Flusser, J. and Suk, T. (1997). Classification of degraded
signals by the method of invariants. Signal Process-
ing, 60(2):243–2492.
Flusser, J. and Suk, T. (1998). Degraded image analysis:
An invariant approach. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 20(6):590–603.
Flusser, J., Suk, T., and Saic, S. (1995). Image feature
invariant with respect to blur. Pattern Recognition,
28(11):1723–1732.
Flusser, J. and Zitová, B. (1999). Combined invariants
to linear filtering and rotation. International Jour-
nal of Pattern Recognition and Artificial Intelligence,
13(8):1123–1136.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
20

Hu, M. K. (1962). Visual pattern recognition by moment
invariants. Institute of Radio Engineers. Transactions.
Information Theory, 8(2):179–187.
Jahne, B. (2005). Digital Image Processing: Concepts, Al-
gorithms, and Scientific Applications. Springer.
Katsaggelos, A. K. (1991). Digital Image Restoration.
Springer-Verlag, New York.
Korevaar, J. (2004). Tauberian Theory - A Century of De-
velopments. Springer - Verlag.
Metari, S. and Deschênes, F. (2007a). A New Convolu-
tion Kernel for Atmospheric Point Spread Function
Applied to Computer Vision. In proceedings of the
Eleventh IEEE International Conference on Computer
Vision. Rio de Janeiro, Brazil, October 14-20.
Metari, S. and Deschênes, F. (2007b). New Classes of Ra-
diometric and Combined Invariants inspired by Mellin
Transform. Technical Report no. 20, 30 pages, Uni-
versité de Sherbrooke, Sherbrooke, Québec, Canada.
Mindru, F., Moons, T., and Gool, L. V. (1999). Recognizing
color patterns irrespective of viewpoint and illumina-
tion. In proceedings of IEEE Computer Vision Pattern
Recognition, 1:368–373.
Reiss, T. H. (1991). The revised Fundamental Theorem
of Moment Invariants. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 13(8):830–834.
Stern, A., Kruchakov, I., Yoavi, E., and Kopeika, S. (2002).
Recognition of motion-blurred images by use of the
method of moments. Applied Optics, 41(11):2164–
2171.
Suk, T. and Flusser, J. (2003). Combined blur and affine
moment invariants and their use in pattern recognition.
Pattern Recognition, 36(12):2895–2907.
Teh, C. H. and Chin, R. T. (1988). On image analysis by the
method of moments. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 10(4):496–513.
Van Gool, L., Moons, T., and Ungureanu, D. (1996).
Affine/photometric invariants for planar intensity pat-
terns. In proceedings of the 4th European Conference
on Computer Vision, 1:642–651.
Zayed, A. I. (1996). Handbook of Function and General-
ized Function Transformations. CRC Pr I Llc.
Zisserman, A. and Hartley, R. I. (2003). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press.
NEW INVARIANT DESCRIPTORS BASED ON THE MELLIN TRANSFORM
21
