
TOUCH-LESS PALM PRINT BIOMETRIC SYSTEM
Michael Goh Kah Ong, Connie Tee and Andrew Teoh Beng Jin
Multimedia University, Jalan Ayer Keroh Lama, 75450, Melaka, Malaysia
Keywords: Palm print recognition, hand tracking, local binary pattern (LBP), gradient operator, probabilistic neural
networks (PNN).
Abstract: In this research, we propose an innovative touch-less palm print recognition system. This project is
motivated by the public’s demand for non-invasive and hygienic biometric technology. For various reasons,
users are concerned about touching the biometric scanners. Therefore, we propose to use a low-resolution
web camera to capture the user’s hand at a distance for recognition. The users do not need to touch any
device for their palm print to be extracted for analysis. A novel hand tracking and palm print region of
interest (ROI) extraction technique are used to track and capture the user’s palm in real time video streams.
The discriminative palm print features are extracted based on a new way that applies local binary pattern
(LBP) texture descriptor on the palm print directional gradient responses. Experiments show promising
result by using the proposed method. Performance can be further improved when a modified probabilistic
neural network (PNN) is used for feature matching.
1 INTRODUCTION
Palm print recognition is a biometric technology
which recognizes a person based on his/her palm
print pattern. Palm print serves as a reliable human
identifier because the print patterns are not
duplicated in other people, even in monozygotic
twins. More importantly, the details of these ridges
are permanent. The ridge structures are formed at
about thirteenth weeks of the human embryonic
development and are completed by about eighteenth
week (C. Harold and M. Charles, 1943). The
formation remains unchanged from that time on
throughout life except for size. After death,
decomposition of the skin is last to occur in the area
of the palm print. Compared with the other physical
biometric characteristics, palm print authentication
has several advantages: low-resolution imaging,
low-intrusiveness, stable line features and low-cost
capturing device.
Currently, most of the palm print biometrics
utilize scanner or CCD camera as the input sensor.
The users must touch the sensor for their hand
images to be acquired. In public areas, like the
hospital especially, the sanitary issue is of utmost
importance. People are concerned about placing
their fingers or hands on the same sensor where
countless others have also placed theirs. This
problem is particularly exacerbated in some Asian
countries at the height of the SARS epidemic.
Besides, latent palm prints which remain on the
surface could be copied for illegitimate uses. Apart
from that, the surface will get contaminated easily if
not used right, especially in harsh, dirty, and outdoor
environments. In addition, some conservative
nations may resist placing their hands after a user of
the opposite sex has touched the sensor. Therefore,
there is pressing need for a biometric technology
which is flexible enough to capture the users’ hand
images without having the users to touch the
platform of the sensor.
1.1 Related Work
A number of palm print recognition research have
been reported in the literature and most of them
address the efficiency of the feature extraction
algorithms. The proposed palm print representation
schemes include Eigenpalms (C. Harold and M.
Charles, 1943), Fisherpalms (X. Wu et al., 2003),
Gabor code (D. Zhang et al., 2003), Competitive
Code (W. K. Kong and D. Zhang, 2004), Ordinal
feature (Z. Sun et al., 2005), line features (J. Funada
et al., 1998), and feature points (D. Zhang and W.
Shu, 1999). However, not much detail of the palm
print acquisition method was provided although the
acquisition process is one of the key considerations
in developing a fast and robust online recognition
423
Goh Kah Ong M., Tee C. and Teoh Beng Jin A. (2008).
TOUCH-LESS PALM PRINT BIOMETRIC SYSTEM.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 423-430
DOI: 10.5220/0001073504230430
Copyright
c
SciTePress

system. In earlier study, inked-based palm print
images (J. Funada et al., 1998) (D. Zhang and W.
Shu, 1999) were used. The palm prints were inked to
paper and digitized using scanner. The two-step
process was slow and is not suitable for online
system. Recently, various input sensor technology
like flatbed scanner, CCD camera, CMOS camera,
and infrared sensor have been introduced for more
straight-forward palm print acquisition. Among the
technology, scanner and CCD camera are the
commonly used input devices (C. Harold and M.
Charles, 1943) (X. Wu et al., 2003). Scanner and
CCD camera are able to provide very high quality
images with little loss of information. However, the
process of scanning a palm image requires some
time (a few seconds) and the delay cannot cope with
the requirement of an online system. Zhang et al. (D.
Zhang et al., 2003) proposed the use of CCD camera
in semi-closed environment for online palm print
acquisition and good results had been reported by
using this approach. In this paper, we explore the use
of a low-resolution web-cam for palm print
acquisition and recognition in real-time system.
1.2 Challenges
There is high demand for touch-less biometrics due
to various social and sanitary issues. However, the
design of touch-less palm print system is not easy.
Since the touch-less system does not restrict the user
to touch or hold any platform and guidance peg, the
system must be able to detect the existence of hand
once the hand is presented on the input sensor. The
main challenges in designing the touch-less system
are highlighted as follow:
Distance between the hand and input sensor –
Since the user’s hand is not touching any
platform, the distance of the hand from the input
sensor may vary. If the hand is placed too far
away from the input sensor, the palm print details
will be lost. On the other hand, if the hand is
positioned too near to the input sensor, the sensor
may not be able to capture the entire hand image
and some area of the palm print maybe missing.
Thus, a system which allows flexible range of
distance between the hand and the input sensor
should be designed.
Clenched fingers/palm – Some users may overly
clench their fingers and palm due to nervousness
or other factors. If the user’s fingers and palm are
hold tightly together, the skin surface of the palm
tends to crumple and fold up and produce some
non-permanent wrinkles that may perturb the
performance of system. Therefore, a robust
algorithm that could tackle this situation must be
devised.
Hand position and rotation – As no guidance
peg is used to constraint the user’s hand, the user
may place his/her hand in various directions and
position. The system must be able to cope with
changes in position and orientation of the user’s
hand in a less restrictive environment.
Lighting illumination - Variation in lighting can
have significant effect on the ability of the system
to recognize individuals. Thus, the system must be
capable of generalizing the palm print images
across lighting changes.
1.3 Contributions
In this paper, we have endeavoured to develop an
online touch-less palm print recognition system that
attempts to confront the challenges above. A touch-
less palm print recognition system is designed by
using low-resolution CMOS web camera to acquire
real-time palm print images. A novel hand tracking
algorithm is developed to automatically track and
detect the region of interest (ROI) of the palm print.
A pre-processing step is proposed to correct the
illumination and orientation in the image. As edges
(principal lines, wrinkles and ridges) capture the
most important aspects of the palm print images, an
algorithm is developed to preserve and enhance the
line structures under varying illumination and pose
changes. We have proposed a new feature extraction
method to extract the distinguishing palm print
feature for representation. Gradient operator is
applied to obtain the directional responses of the
palm print and LBP is used to obtain the texture
description of the palm pattern in different
directions. Besides, a modified PNN is also devised
as the real-time feature matching tool in this
research.
2 PROPOSED SYSTEM
In this paper, we propose a touch-less online palm
print recognition system. We describe a flexible
hand tracking and ROI locator to detect and extract
the palm print in real-time video stream. The
algorithm works under typical office lighting and
daylight conditions. Figure 1 shows the framework
of the proposed system.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
424

Figure 1: The proposed touch-less palm print recognition
system.
2.1 Hand Tracking and ROI
Extraction
The hand tracking and ROI extraction step consists
of three stages. First, we segment the hand image
from the background by using the skin-colour
thresholding method. After that, a valley detection
algorithm is used to find the valleys of the fingers.
These valleys serve as the base points to locate the
palm print region. The details of the steps are
provided in the following sections.
2.1.1 Skin-Colour Thresholding
In order to segment human hand from the
background, the skin colour modal proposed by
(internet: Face Detection, 2000) is used. The human
skin colour can be modelled as a Gaussian
distribution,
(, )N
μ
σ
, in the chromatic colour space,
x. The chromatic colour space can remove
luminance from the colour representation. To
segment the hand from the background, the
likelihood of the skin colour, L, can be computed by
as
()()
1
exp 0.5
T
Lxx
μ
σμ
−
⎡⎤
=− − −
⎣⎦
where
μ
and
σ
are the mean and covariance of the skin colour
distribution. We use samples from 1005 skin colour
images to determine the values of
μ
and
σ
. After the
skin likelihood value is determined, the hand is
segmented from the background by using the
thresholding method. Figure 2 depicts the result of
binarizing a hand image.
(a)
(b)
Figure 2: Skin-colour thresholding: (a) The original hand
image; (b) segmented hand image in binary form.
2.1.2 Valley Detection
We propose a novel competitive hand valley
detection (CHVD) algorithm to locate the ROI of the
palm. We trace along the contour of the hand to find
possible valley locations. A pixel is considered a
valley if it has some neighboring points lying in the
non-hand region while the majority neighboring
points are in the hand region (Figure 3). If a line is
directed outwards from the pixel, the line must not
cross any hand region along the way. Based on these
assumptions, four conditions are formulated to test
the existence of a valley. A pixel must satisfy all the
four conditions to be qualified as a valley location. If
it fails one the conditions, the pixel will be
disregarded and the algorithm proceeds to check for
valley-existence in the next pixel. Rather than
scanning the entire hand image for valley location,
the competitive valley checking method greatly
speeds up the valley detection process.
(a)
(b)
(c)
Figure 3: The proposed competitive hand valley detection
algorithm.
The four conditions to check the current pixel
for valley existence are:
▪ Condition 1: Four checking-points with equal
distance are placed around the current pixel
(Figure 3(a)). The four points are placed β pixels
away from the current pixel. If one of the points
falls in the non-hand region (pixel value = 1),
while the remaining within the hand region (pixel
values = 0), this pixel is considered a candidate
for valley and we proceed to check for Condition
2. Otherwise, the test stops and the algorithm
proceeds to check the next pixel.
▪ Condition 2: The distance of the checking-points
from the current pixel is increased to β+α pixels,
and the number of checking-points is increased to
eight (Figure 3(b)). If there is at least 1 and not
more than 4 consecutive neighbouring points
falling in the non-hand region, while the
remaining within the hand region, this pixel
satisfies the second condition and we proceed to
the next condition.
▪ Condition 3: The number of checking-points is
increased to 16. The distance of the points from
the current pixel is β+α+µ pixels. If there is at
least 1 and not more than 7 points falling in the
TOUCH-LESS PALM PRINT BIOMETRIC SYSTEM
425

non-hand region, while the remaining points
within the hand region, this pixel is considered a
candidate for valley and we proceed to the last
condition.
▪ Condition 4: To complete the test, a line is drawn
from the current pixel towards the non-hand
region (Figure 3(b)). This is to avoid erroneous
detection of a gap /loop-hole in the hand as valley.
If this line does not pass through any hand-region
along the way, the current pixel is asserted as a
valley point.
In this research, the values of β, α, and µ are set
to 10. We set the range of the number of checking-
points in the non-hand region in the three conditions
to be 1, 1 ≤points< 4, and 1 ≤points< 7, respectively.
This is based on the assumption that nobody can
stretch his/her finger apart beyond 120
o
. For
example, the angle between the 2 fingers illustrated
in Figure 3(c) is approximately 90
o
estimated based
on the sectors of the circle between the fingers (each
sector = 22.5
o
).
2.1.3 ROI Location
After obtaining the valleys of the finger, P
1
, P
2
, P
3
,
and P
4
, a line is formed between P
2
and P
4
. After
that, a square is drawn below the line as shown in
Figure 4(b). The square represents the region of
interest (ROI) of the palm. Based on the experiment,
the average time taken to detect and locate the ROI
is less than 1 millisecond.
(a) (b) (c)
Figure 4: The ROI location technique: (a) Locations of the
4 valleys, (b) a line is drawn to connect P
2
and P
4
. A
square is drawn from the line. This square forms the ROI
of the palm, (c) the ROI detected in the other side of the
hand.
2.2 Image Pre-processing
As the ROIs are of different sizes and orientations,
the pre-processing job is performed to align all the
ROIs into the same locations. First, the images are
rotated to the right-angle position by using the Y-
axis as the rotation-reference axis. After that, as the
size of the ROIs vary from hand to hand (depending
on the sizes of the palms), they are resized to a
standard image size by using bicubic interpolation.
In this research, the images are resized to 150 x 150
pixels.
We enhance the contrast and sharpness of the
palm print images so that the dominant palm print
features like principal lines and ridges can be
highlighted and become disguisable from the skin
surface. The Laplacian isotropic derivative operator
is used for this purpose. After that, the Gaussian
low-pass filter is applied to smooth the palm print
images and bridge some small gaps in the lines.
Figure 5(a) shows the original palm print image and
Figure 5(b) depicts the result of applying the image
enhancement operators. The detail in the enhanced
image is clearer and sharper in which fine details
like the ridges are more visible now.
(a)
(b)
Figure 5: (a) The original palm print, (b) palm print after
the contrast adjustment and smoothing effect.
2.3 Feature Extraction
We propose a new way to apply the Local Binary
Patterns (LBP) texture descriptor (T. Ojala et al.,
2002) on the directional responses of gradient
operator. Unlike fingerprint which flows in uniform
structure with alternating ridges and furrows, the
texture of palm print is irregular and the lines and
ridges can flow in various directions. This motivates
us to decompose the line patterns into four directions
and study them separately. LBP is then used to
analyze and describe the texture of the palm print in
the various directions.
The Sobel operator is deployed in this work to
obtain the palm print responses in different
orientations. The Sobel operator is a well-known
filter that can be used to detect discrete directional
gradient. We applied Sobel operator to find palm
print responses along the horizontal, vertical and
diagonal in minus and plus 45 degree directions. The
Sobel masks used are illustrated in Figure 6.
(a) (b) (c) (d)
Figure 6: The Sobel masks used to detect the palm print
(a) horizontally, (b) vertically, (c) diagonally at positive
45
o
, and (d) diagonally at negative 45
o
.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
426
For computational efficiency and noise reduction
purposes, we first decompose the palm print image
into lower resolution images by using wavelet
transformation before applying the Sobel operator.
Refer (T. Connie et al., 2005) for the detail of
applying wavelet transformation on palm print
images. Figure 7 shows the components of the palm
print in four directions by applying Sobel operator.
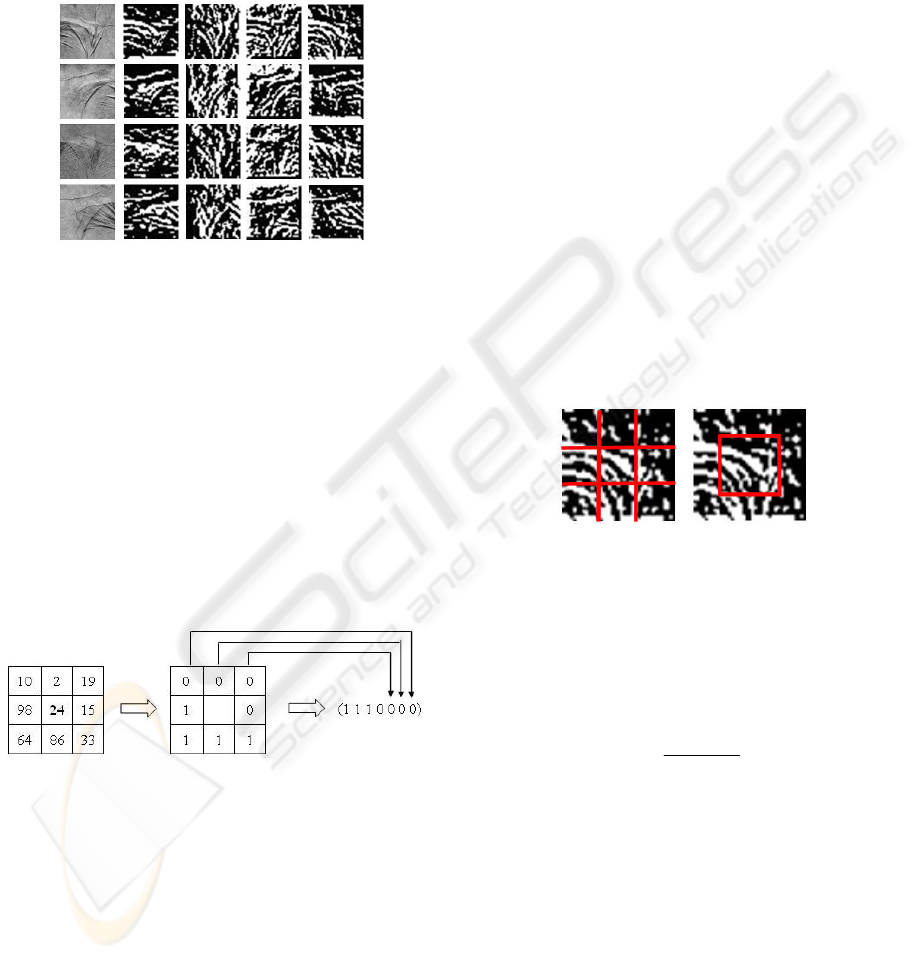
Figure 7: Examples of directional responses derived using
Sobel operator. (a) Original palm print images, (b) to (e)
components of the images in the horizontal, vertical,
positive 45
o
, and negative 45
o
directions.
2.3.1 Local Binary Patterns
The LBP operator (T. Ojala et al., 2002) is a simple
yet powerful texture descriptor that has been used in
various applications. Its high discrimination ability
and simplicity in computation have made it very
suitable for online recognition system. LBP operator
labels every pixel in an image by thresholding its
neighboring pixels with the center value. Figure 8
illustrates an example how the binary label for a
pixel value is obtained.
Figure 8: Example to calculate the binary label in LBP.
It is found that certain fundamental patterns in
the bit string account for most of the information in
the texture [15]. These fundamental patterns are
termed as “uniform” patterns and they are bit strings
with at most 2 bitwise transitions from 0 to 1 and
vice versa. Examples of uniform patterns include
00000000, 11110000, and 00001100. A label is
given to each of the uniform patterns and the other
“non-uniform” patterns are assigned to a single
label. After the labels have been determined, a
histogram of the labels is constructed as:
{
}
,
(, ) ,
l
ij
HLijl==
∑
0,... 1ln=−
(1)
where n is the number of different labels produced
by the LBP operator. The histograms of the labels
are used as the texture descriptor. It contains
information about the local descriptions in the
image.
In this work, we divide the palm print images
into several local regions,
12
, ,...,
m
R
RR
, and extract
the texture descriptor from each region
independently. The local texture descriptors are then
concatenated to form a global descriptor of the
image. We subdivide the image into 9 equally-sized
sub-windows, and an overlapping window in the
centre (Figure 9). The reason we form a window in
the centre is because we believe that the region
encodes important information of edge flow of the
three principal lines. The same operation is
performed on the other palm print components in the
three other directions. Therefore, the texture
descriptor for a given palm print will have a size of n
(the number of labels) x m (the number of sub-
windows) x 4 (the components of palm print in 4
directions).
Figure 9: A palm print image is divided into rectangular
sub-windows. (We show the sub-windows in two separate
images for clearer illustration).
2.3.2 Feature Matching
In this research, the Chi-square measure is deployed
as the feature matching tool:
()
2
2
0
(, )
n
ii
i
ii
PG
PG
PG
χ
=
−
=
+
∑
(2)
where n is the number of length of the feature
descriptor, P is the probe set, and G denotes the
gallery set. We have also deployed a modified
Probabilistic neural network (PNN) to classify the
palm print texture descriptors using the neural
networks approach. The motivations of using PNN
are driven by its good generalization property and its
ability to classify dataset in just one training epoch.
PNN is a kind of radial basis network primarily
based on the Bayes-Parzen classification. Besides
the input layer, it contains a pattern, summation and
output layers (T. Andrew et al., 2006). The pattern
TOUCH-LESS PALM PRINT BIOMETRIC SYSTEM
427

layer consists of one neuron for each input vector in
the training set, while the summation layer contains
one neuron for each class to be recognized. The
output layer merely holds the maximum value of the
summation neurons to yield the final outcome
(probability score). To tailor the specific
requirement of the proposed online palm print
recognition system, the formula to calculate the
outcome of the pattern layer is modified to
2
1
exp (( ) /( )) /out
ω
ωσ
=
⎛⎞
=− − +
⎜⎟
⎜⎟
⎝⎠
∑
n
jiijiij
i
PP
. In this
case, out
j
is the output of neuron j in pattern layer; P
i
refers to the probe set of user i, ω
ij
denotes the
weight between i
th
neuron of the input layer and j
th
neuron in the pattern layer. σ is the smoothing
parameter of the Gaussian kernel and is also the only
parameter dependent on the user’s choice. In this
paper, the value of σ is set to 0.1 (T. Andrew et al.,
2006).
3 EXPERIMENT SETUP
In this experiment, a standard PC with Intel Pentium
4 HT processor (3.4 GHz) and 1024 MB random
access memories is used. Our capturing device is a
1.3 mega pixel web camera. The palm print is
detected in real-time video sequence at 25 fps. The
image resolution is 640 x 480 pixels, with color
output type in 256 RGB (8 bits-per-channel). The
interval between capturing the next ROI is 2
seconds. The exposure parameter of the web-cam is
set to low to reduce the effect of background light as
the background light may disrupt the quality of the
palm print image. We place a 9 watt warm-white
light bulb beside the camera. The bulb emits
yellowish light source that enhances the lines and
ridges of the palm. A black cardboard is placed
around the web-cam and light bulb to set up a semi-
controlled environment as shown in Figure 10. The
black cardboard can absorb some reflectance from
the light bulb so that the palm image will not appear
too bright.
Figure 10: The experiment setup.
The proposed methodology is tested on a
database containing palm images from 320
individuals. 147 of them are females, 236 of them
are less than 30 years old, and 15 of them are more
than 50 years old. The testing subjects come from
different ethnic groups: 136 Chinese, followed by
125 Malays, 45 Indians, 6 Arabians, 2 Indonesians,
2 Pakistanis, a Africans, a Mongolian, a Sudanese
and a Punjabi. Most of them are students and
lecturers from Multimedia University. To investigate
how well the system can identify unclear or worn
palm prints due to laborious work, we have also
invited ten cleaners to contribute their palm print
images to our system.
The users can place their hands about 40cm to
60 cm above the input sensor. The users are
requested to stretch their fingers during the image
capturing process. They are allowed to wear rings
and other ornaments. Besides, users with long finger
nails can also be detected by the system. Twenty
palm print images were captured from each hand
and this yields a total of 12, 800 palm print images
in the database.
4 RESULTS AND DISCUSSION
In this section, we conduct extensive experiments to
evaluate the effectiveness and robustness of the
proposed system. We first carried out palm print
tracking in dynamic environment to validate the
robustness of the proposed hand tracking technique.
After that, we performed offline testing to evaluate
the performance of the proposed algorithm.
4.1 Online Palm Print Tracking
The first experiment is conducted in the semi-
controlled environment shown in Figure 10. A user
was asked to present his hand above the web-cam
and slowly rotate his hand to the left and right
directions. The user was also asked to move his hand
closer and gradually away from the web-cam. Some
tracking results of the palm print region are shown in
Figure 11.
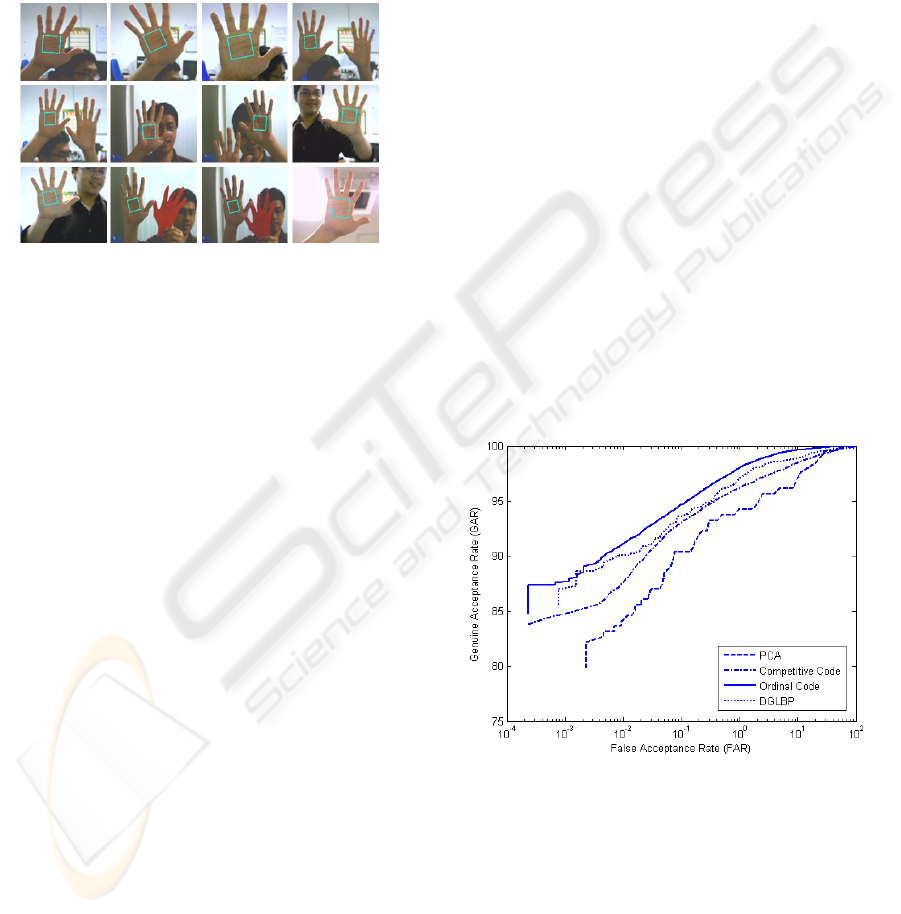
Figure 11: Some tracking results of the proposed palm
print tracking algorithm in semi-controlled environment.
The proposed palm print tracking method
performs quite well as the ROI of the palm print can
Enclosure
Web camera
Hand
Light bulb
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
428
be located regardless of changes in size and
direction. The average time to track and locate the
ROI is 12 milliseconds. We further assessed the
effectiveness of the algorithm in dynamic
environment. In this video sequence, the user had
continuous body movements, and the image was
disrupted by other background objects and varying
illumination conditions. Figure 12 displays the test
sequence to locate the palm print in dynamic
environment.
Figure 12: Some tracking result of the proposed palm print
tracking algorithm in dynamic environment.
Based on the tracking result, the proposed
algorithm performs well in dynamic environment.
The images in the top row, for example, contain
other background objects like calendar, whiteboard,
computer and even the face of the user. The
algorithm was able to locate the palm print region
among the cluttered background. When both hands
were present in the image (for example, the first
image from the right in the first row), the algorithm
detected one of the palm prints. We designed the
system in such a way that only one hand is required
to access the application. Therefore, the first palm
detected in the video sequence was used for further
analysis. Besides, we tried to spoof the algorithm by
presenting a fake hand made from Manila paper.
Some lines were drawn on the fake image to make it
more “palm-like”. Nevertheless, the algorithm still
managed to recognize the real palm based on the
colour cue. Apart from that, we wanted to
investigate how well the tracking algorithm
performs under adverse lighting condition. When the
palm was placed under a bright light exposure (the
first image from the right in the last row), the
algorithm could locate the palm print region
accurately.
4.2 Verification
The experiment was conducted based on the palm
print images captured in the setting described in
Section 3. Among the 20 images provided by each
user for each hand, 10 images are used as gallery set
while the others as probe set. Equal error rate (ERR)
is used as the evaluation criteria in the experiment.
EER is the average value of two error rates: false
acceptance rate (FAR) and false rejection rate
(FRR).
The proposed method is compared against other
representative techniques in palm print recognition
which include PCA (C. Harold and M. Charles,
1943), Competitive Code (W. K. Kong and D.
Zhang, 2004) and Ordinal Code (Z. Sun et al.,
2005). To differentiate our method from the others,
we name it directional gradient based local binary
pattern (DGLBP) thereafter. Figure 13 depicts the
comparison among the four techniques. It is shown
that DGLBP is comparable to that of Competitive
Code and Ordinal Code. Apart from the promising
result, DGLBP has a big advantage over the other
methods because of its simplicity in computation.
LBP operator only requires time complexity of
O(2
n
), where n equals the number of
neighbourhoods, to generate the labels once.
Depending on the number of sub-regions formed in
an image, the time complexity to produce the LBP
descriptor is O(mhw), where m denotes the number
of sub-regions, while, h and w refer to the height
and width of a sub-region, respectively. The
complexity of the algorithm can be reduced to
O(mn) if the sizes of h and w are small.
Figure 13: ROC which compares the performance of four
palm print representative methods.
A comparative study was also conducted by
using Chi-square measure and modified PNN. This
is to investigate how well the modified PNN can
improve the performance of the system. The
comparison is provided in Table 1. Three training
samples were used in training the modified PNN.
TOUCH-LESS PALM PRINT BIOMETRIC SYSTEM
429

Table 1: The EER and the execution time taken for
verification of each user.
Image Resolution EER (%) Average time
(sec.)
Modified PNN 0.74 0.73
Chi-square measure 1.52 0.22
PNN had demonstrated superior performance as
compared to Chi-square measure as PNN possesses
better generalization property. However, the speed
of training was achieved at the cost of increase in
complexity and computational/ memory
requirements. The time complexity for training by
using PNN is O(mp), where m denotes the input
vector dimension and p is the number of training
samples. The time recorded in Table 1 is the speed
taken for PNN and Chi-square measure to run the
verification test using 20 palm print samples. It can
be observed that PNN indeed took longer time than
Chi-square measure. However, the gain in
performance is significant as the EER could be
reduced from 1.52% to 0.74%. Therefore, PNN is
still favoured over Chi-square measure in this
research.
5 CONCLUSIONS
This paper presents an innovative touch-less palm
print recognition. The proposed touch-less palm
print recognition system offers several advantages
like flexibility and user-friendliness. We proposed a
novel palm print tracking algorithm to automatically
detect and locate the ROI of the palm. The proposed
algorithm works well under dynamic environment
with cluttered background and varying illumination.
A new feature extraction method has also been
introduced to extract the palm print effectively. In
addition, we applied a modified PNN to tailor the
requirement of the online recognition system for
palm print matching. Extensive experiments have
been conducted to evaluate the performance of the
system. Experiment results show that the proposed
system is able to produce promising result. Apart
from that, another valuable advantage is that the
proposed system could perform very fast in real-time
application. It takes less than 3 seconds to capture,
process and verify a palm print image in a database
containing 12, 800 images.
REFERENCES
C. Harold, and M. Charles, “Finger Prints, Palms and
Soles An Introduction To Dermatoglyphics,” The
Blakiston Company Philadelphia, 1943.
G. Lu, D. Zhang, K. Wang, “Palmprint Recognition Using
Eigenpalms Features,” Pattern Recognition Letters,
vol. 24, issues 9-10, pp. 1473-1477, 2003.
X. Wu, D. Zhang, K. Wang, “Fisherpalms Based
Palmprint Recognition,” Pattern Recognition Letters,
vol. 24, pp. 2829–2838, 2003.
D. Zhang, W. Kong, J. You, M. Wong, “On-line Palmprint
Identification,” IEEE Transaction on PAMI, vol. 25
(9), pp. 1041-1050, 2003.
W.K. Kong, D. Zhang, “Competitive Coding Scheme for
Palm print Verification,” Proceedings of the 17th Int’l
Conf. on Pattern Recognition, ICPR’04, 2004.
Z. Sun, T. Tan, Y. Wang, S.Z. Li, “Ordinal Palmprint
Representation for Personal Identification,” CVPR,
pp. 279-284, 2005.
J. Funada, N. Ohta, M. Mizoguchi, T. Temma, K.
Nakanishi, A. Murai, T. Sugiushi, T. Wakabayashi, Y.
Yamada, “Feature Extraction Method for Palmprint
Considering Elimination of Creases,” Proceedings of
the 14
th
International Conference on Pattern
Recognition, vol. 2, pp. 1849-1854, 1998.
D. Zhang, W. Shu, “Two Novel Characteristics in
Palmprint Verification: Datum Point Invariance and
Line Feature Matching,” Pattern Recognition, vol. 32,
pp. 691-702, 1999.
Face Detection - http://www-cs-students.stanford.edu/
~robles/ee368/main.html, 2000.
T. Ojala, M. Pietikäinen, T. Mäenpää, “Multiresolution
Gray-scale and Rotation Invariant Texture
Classification With Local Binary Patterns,” IEEE
Transaction on Pattern Analysis and Machine
Intelligence, vol. 24(7), pp. 469-481, 2002.
T. Connie, T. Andrew, K.O. Goh, “An Automated
Palmprint Recognition System,” Image and Vision
Computing, vol. 23 (5), pp. 501-515, 2005.
T. Andrew, T. Connie, N. David, “Remarks on BioHash
and Its Mathematical Foundation,” Information
Processing Letters, vol. 100(4), pp. 145-150, 2006.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
430
