
MODEL BASED GLOBAL IMAGE REGISTRATION
Niloofar Gheissari, Mostafa Kamali, Parisa Mirshams and Zohreh Sharafi
Computer Vision Group, School of Mathematics
Institute for studies in Theoritical Physics and Mathematics, Tehran, Iran
Keywords: Image Registration, Model Selection, Panorama.
Abstract: In this paper, we propose a model-based image registration method capable of detecting the true
transformation model between two images. We incorporate a statistical model selection criterion to choose
the true underlying transformation model. Therefore, the proposed algorithm is robust to degeneracy as any
degeneracy is detected by the model selection component. In addition, the algorithm is robust to noise and
outliers since any corresponding pair that does not undergo the chosen model is rejected by a robust fitting
method adapted from the literature. Another important contribution of this paper is evaluating a number of
different model selection criteria for image registration task. We evaluated all different criteria based on
different levels of noise. We conclude that CAIC and GBIC slightly outperform other criteria for this
application. The next choices are GIC, SSD and MDL. Finally, we create panorama images using our
registration algorithm. The panorama images show the success of this algorithm.
1 INTRODUCTION
Image registration refers to the process by which
two or several images (taken from different view
points) are transformed and integrated into a single
coordinate system. This means image registration
involves estimating transform parameters such as
rotation, scaling and translation. Generally, there are
two main approaches to image registration: local
registration and global registration, each of which
has its own advantages and disadvantages.
Local methods find small patches (blocks) or interest
points, match them and register two images based on
the parameters estimated from the corresponding
points or blocks. Global methods minimize a global
energy term, which describes the error generated by
aligning two images. This error might be the sum of
squared differences of intensity values or a more
complicated measure.
Local methods are able to deal with local
deformations and distortions while they might
generate undesirable results along patch boundaries.
In contrast, global methods are robust. However,
global methods are unable to deal with local
motions. For a more elaborate survey on image
registration methods we refer the reader to (Zitova &
Flusser, 2003).
In this paper, we introduce a new image
registration method that automatically selects the
true underlying transform model from a library of
candidate models. This model library consists of 2D
transformation models that might describe the
motion model between two images. We use 2D
models (rather than 3D ones) because our
application is global registration for making
panoramic images. Using the correct model that can
describe the true camera motion model is
adventurous. For example, the algorithm is more
robust to noise and outlier since any corresponding
pair that does not undergo the chosen model is
rejected. In addition, this method best suits virtual
reality applications where a virtual object is to be
placed in a real background. Since the true
transformation model and the model parameters are
computed, they can be applied to the virtual object
so that its motion is consistent with the rest of the
image (the real part) and generate more realistic
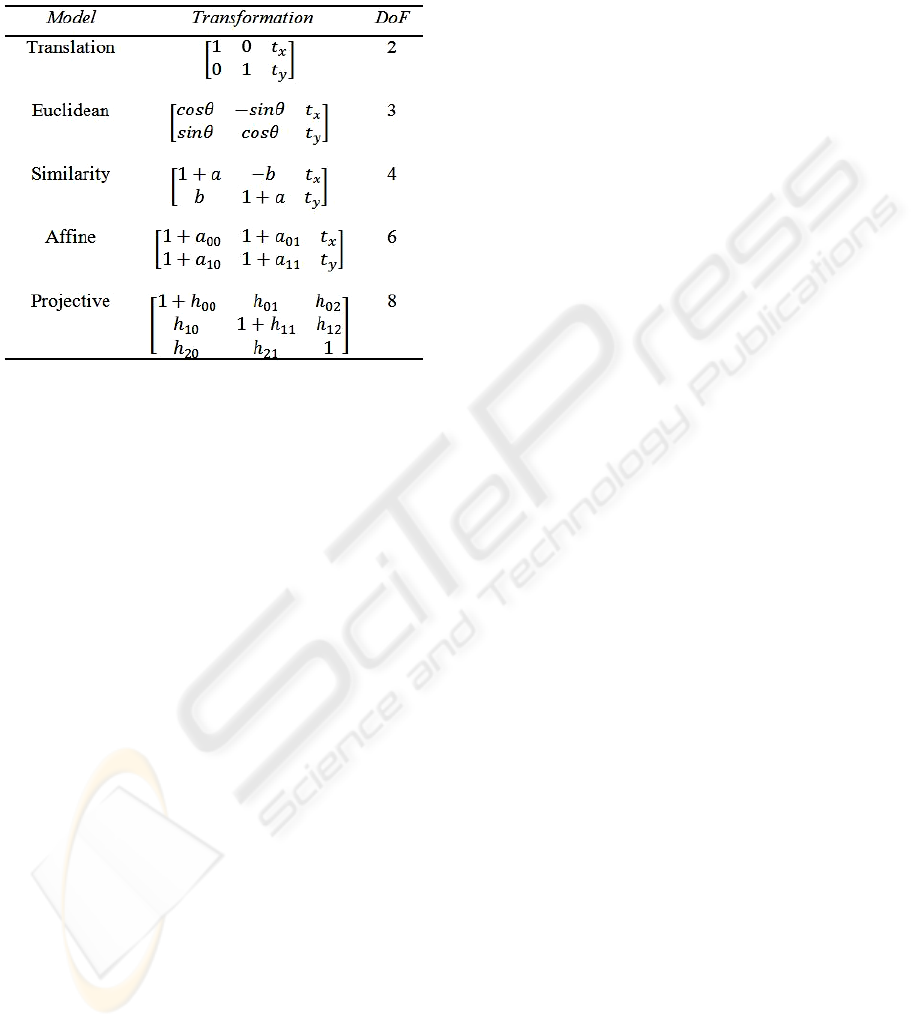
images. As mentioned before, our algorithm chooses
the true transformation model from a model library
which includes pure translation, Euclidean,
similarity, affine, and projective models as shown in
Table 1. The model library includes all possible
models from the most complex model (projective) to
the most degenerated model (pure translation). The
nested property of this library allows us to use an
440
Gheissari N., Kamali M., Mirshams P. and Sharafi Z. (2008).
MODEL BASED GLOBAL IMAGE REGISTRATION.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 440-445
DOI: 10.5220/0001074804400445
Copyright
c
SciTePress
information theoretic criterion to select the true
model.
Table 1: The model library used for image registration
(Szeliski, 2006).
This paper is organized as follows. We first
discuss some of statistical model selection criteria
for computer vision applications in section 1.1.
Next, we describe our model-based image
registration method in section 2. An important
component of the proposed registration method is
model selection. We evaluate a number of different
model selection criteria for image registration
application in section 3. We show that CAIC and
GBIC outperform the other statistical criteria.
Section 4 is dedicated to making panoramic images,
and in section 5 we present our conclusion.
1.1 Model Selection Criteria and their
Use in Image Registration
Model selection criteria allow choosing the true
model by establishing a trade-off between “fidelity”
and the “complexity” of that model. Because the
most complex (highest order) model always fit the
data better than any other model, it has more degrees
of freedom.
In this paper, we propose to use a model selection
criterion to detect the true transformation model for
registering a pair of images. If we use a more
general model than the true model (over-fit), we
allow noise and outliers to affect parameters
estimation more severely. This is because having
more degrees of freedom gives enough flexibility to
the model to bend and twist itself and consequently
fits to noise and outliers. In contrast, having a less
general model (than the correct model), will result in
under fitting. Under fitting has the danger of
rejecting inliers as being outlier and so disregarding
important information.
These model selection criteria score a model
based on two terms. That is the accuracy of the fit
(fidelity) that is usually the logarithmic likelihood of
the estimated parameters of the model. This
likelihood is equal to the scaled sum of squared
residuals, providing noise is Gaussian. The term
scoring the complexity is a penalty term for higher
order models so that the criterion always avoids
choosing the most general model.
Akaike perhaps was the first to introduce a
model selection criterion known as AIC (Akaike,
1974). The main idea behind AIC is the fact that the
correct model can sufficiently fit any future data
with the same distribution as the current data. AIC
has been modified in many ways. For example,
many model selection criteria including CAIC
(Bozdogan, Model selection and Akaike's
Information Criterion (AIC): The general theory and
its analytical extensions, 1987), GAIC (Kanatani,
Model selection for geometric inference, 2002), and
GIC (Torr, 1999) are derived from AIC.
Later, in 1978, Rissanen introduced MDL
(Rissanen, Modeling by shortest data description,
1978). The underlying logic of MDL is that the
simplest model that sufficiently describes the data is
the best model. Kanatani derived GMDL (Kanatani,
Model selection for geometric inference, 2002),
which has a very similar logic to MDL, specifically
for geometric fitting.
Another group of model selection criteria is
based on Bayesian rules such as GBIC (Chickering
& Heckerman, 1997). They choose the model that
maximizes the conditional probability of describing
a data set by a model.
Cost functions of the aforementioned criteria and
two other model selection criteria Mallow CP
(Mallows, 1973) and SSD (Rissanen, Universal
coding, information, prediction, and estimation,
1984) are shown in
Table 2. A more complete survey
on different available model selection criteria can be
found in (Gheissari & Bab-Hadiashar, Model
Selection Criteria in Computer Vision: Are They
Different?, 2003).
There have been a few papers; such as (Bhat, et
al., 2006), in the image registration literature
concerned about choosing the true transformation
model between two images. However, they use a
heuristic approach to decide whether the
transformation model is a simple homography or the
fundamental matrix.
MODEL BASED GLOBAL IMAGE REGISTRATION
441

Table 2: Different model selection criteria cost functions.
N is the number of correspondences, p is the degree of
freedom of a model, r is the residual, δ is the scale of noise
of the highest order model in the library, and d is the
dimension of our data. We set λ
1
and λ
2
to be 2 and 4
respectively.
To the best of our knowledge, the only image
registration method that incorporates a statistical
model selection criterion to choose the true model is
the method proposed by Yang et al. (Yang et al.
2006). They start from the lowest order model and
iteratively apply a modified version of AIC to
choose between a model and its immediate higher
order model. The process terminates if a model is
chosen over its immediate higher order model or the
most general model is selected.
Our model selection step differs from Yang et al.
in different ways. This is firstly because they only
apply a model selection criterion to select between
only two models and not a library of models. In
addition, they only consider similarity, affine and
projective transformations while we also consider
pure translation and Euclidean transformations for
detecting camera motions. More importantly, the
none-iterative nature of our method makes it faster
than the method of Yang et al. Finally, since we
apply the outlier rejection phase before and separate
from the model selection task, we do not violate the
general assumption (made by statistical criteria) that
the data is outlier free.
2 THE PROPOSED IMAGE
REGISTRATION METHOD
In the following subsections, we describe the details
of the proposed image registration algorithm.
Different elements of our algorithm include feature
detection and matching, robust fitting, and model
selection. An outline of the proposed algorithm is as
follows:
1. Finding a set of correspondences between two
images.
2. Finding an initial outlier-free (inliers) set of
correspondences. This is achieved by robustly
fitting a translation model to the
correspondences.
3. Fitting all models in the model library to the
above set of inliers.
4. Applying a model selection criterion to choose
the true underlying model of the above set.
5. Finding the final set of inliers by applying the
chosen model to the dataset and re-estimating
the scale of noise.
6. Re-estimating the parameters of the chosen
model.
We fit a translation model to the dataset (Step 2)
only to find an initial set of outliers. In Step 3, a
model selection criterion is applied to this initial set
of outliers and the true model is chosen. We need to
find this initial set of inliers since almost all model
selection criteria available in the literature assume
the data set to be outlier-free. In Step 2, we choose
to use the lowest order model in the model library to
ensure this initial dataset only include inliers.
Our algorithm is implemented by MATLAB and
registers two images of size 350×530 in 5.5 second
on an Intel 1.86 GHz platform. Most of this time is
spent for feature detection and matching (about 5
seconds). We used Scale-Invariant Feature
Transform (SIFT) (Lowe, 2004) for this purpose. To
match feature points of two corresponding images,
as suggested by Low (Lowe, 2004), we used the
nearest neighbor ratio matching strategy. If we use
the Speeded Up Robust Features (SURF) (Bay,
Tuytelaars, & Van Gool, 2006) and implement the
algorithm in C++, we expect to achieve real-time
performance.
2.1 Parameter Estimation
Consider we have a number of corresponding points
between two images. Let
be a point in the first
image and
its corresponding point in the second
image, i.e.
Model
Selection
The scoring function
MDL
2
1
2
)log()2/(
δ
NPr
N
i
i
+
∑
=
GMDL
222
1
()log(/)
N
i
i
rNdP L
δδ
=
−+
∑
GBIC
∑
=
++
N
i
i
NPNdr
1
22
))4log()4log((
δ
Mallow CP
22
1
(2)
N
i
i
rNP
δ
=
+− +
∑
GAIC
2
1
2
)(2
δ
PdNr
N
i
i
++
∑
=
SSD
2
1
2
))1log(224/)2log((
δ
++++
∑
=
pNPr
N
i
i
AIC
22
1
2
N
i
i
rP
δ
=
+
∑
GIC
222
12
1
N
i
i
rdN P
λ
δλδ
=
++
∑
CAIC
22
1
(log 1)
N
i
i
rP N
δ
=
++
∑
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
442
x=(x, y) ↔ (x´, y´) =x
We are investigating a transformation T under which
X´= T
x (1)
We estimate the initial parameters for each
transformation model using a least square method.
Projective transformation is estimated using
Normalized Direct Linear Transformation (Hartley
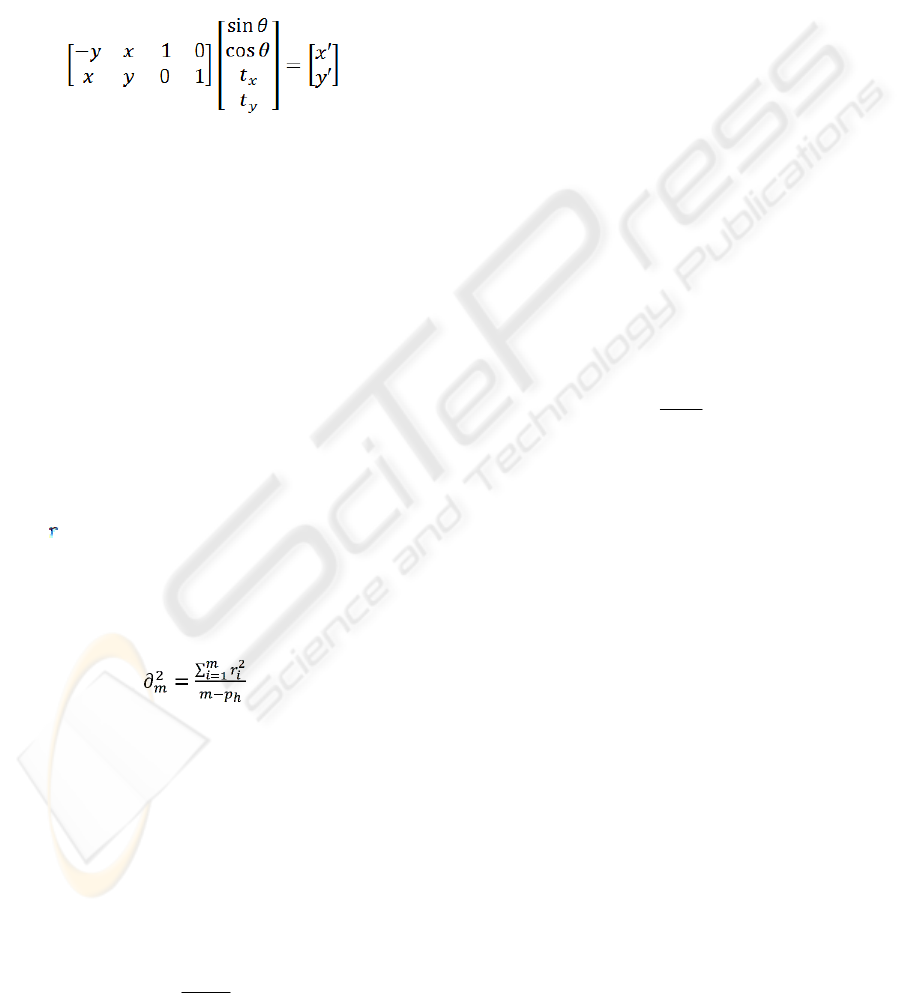
& Zisserman, 2004). For Euclidean transformation
the procedure is different. For this transformation,
we have the following system of equations:
(2)
Also the following equation should be satisfied
(sin θ )
2
+ (cos θ)
2
=1 (3)
We solve this non-linear system of equations by
using the solution of the unconstrained equation
system as an initial point.
2.2 Robust Fitting and Outlier
Rejection
Finding correspondences between two images
involves errors introduced by noisy features,
erroneous feature descriptors, and inaccurate
distance measurements. Hence, due to noise and
outliers instead of Equation 1 we have
r =Tx – x´ (4)
where
is the residual (error). To reject false
correspondences between two images as outliers, we
apply the following procedure as suggested by (Bab-
Hadiashar & Suter, 1999). We sort the residuals and
compute the scale of noise for m= p + 1, …,n
according to
(5)
Then, we iteratively increase m until
222
1mm
rT
+
>∂
or m=n. Here, T is a constant factor obtained from
Gaussian distribution table. We set T=2.5 in our
experiments. The smallest outlier is where
222
1mm
rT
+
>∂
(6)
Use of this formula for the scale of noise can be
justified by the fact that, if the model is correct and
the error, r, is subjected to a normal distribution of
zero mean, then the statement
2
1
2
m
i
i
r
=
∂
∑
(7)
is subjected to a χ
2
distribution with m-p degrees of
freedom (Kanatani, Model selection criteria for
geometric inference, 2000). All points with residuals
more than r
m+1
are rejected as being outliers. We
iteratively carry out the above process until no more
outlier is removed. Having omitted all outliers, we
compute the final transformation robustly.
2.3 Model Selection
After removing outliers, we fit each model in the
model library to the remaining data. Then we
compute the residuals for each model and compute
the scores for a model selection criterion (according
to
Table 1). Our experiments (discussed in Section 3)
suggest that CAIC and GBIC are the preferred
model selection criteria among those we evaluated.
We use the scale of noise of the higher order model
for model selection task. As explained by Kanatani
(Kanatani, Model selection criteria for geometric
inference, 2000), the scale of noise of the correct
model and the scale of noise of the higher order
models (higher than the correct model) must be
close enough for the fit to be meaningful. Therefore,
it is the most accurate estimation of the true scale of
noise available at this stage. We compute the scale
of noise according to
2
2
1
N
i
i
h
r
N
p
=
∂=
−
∑
(8)
where N is the number of inliers and p
h
is the
number of parameters of the highest model in the
library (here set to be 8).
3 EVALUATING MODEL
SELECTION CRITERIA FOR
IMAGE REGISTRATION
We evaluated nine different model selection criteria
for image registration. In our experiments a model
selection criterion was expected to be able to
identify (from the model library shown in Table 2),
the true underlying transformation model between a
set of corresponding points. To achieve this, we
gathered 40 challenging images from five different
environments:
1. External views of different buildings.
2. Internal views of different building.
3. Natural scenes.
4. Views of roads and streets.
5. Views of stadiums and football field.
After applying different synthetic
transformations to the above database, we fit each
MODEL BASED GLOBAL IMAGE REGISTRATION
443
model in the model library to the remaining data.
Then we compute the residuals for each model and
compute the scores for all different model selection
criteria listed in Table 1. For each criterion, we
choose the model that minimizes the score of it.
Our objective was also to examine the effect of
noise level on the success rate of each criterion.
After finding correspondences, we add Normal noise
of different variances (with zero mean) to the pixel
coordinates of corresponding feature points.
This is because our objective was to examine the
performance of different criteria independently from
the particular matching algorithm used. However,
the normal noise added to pixel coordinates
simulates normally distributed errors generated by
the feature matching process.
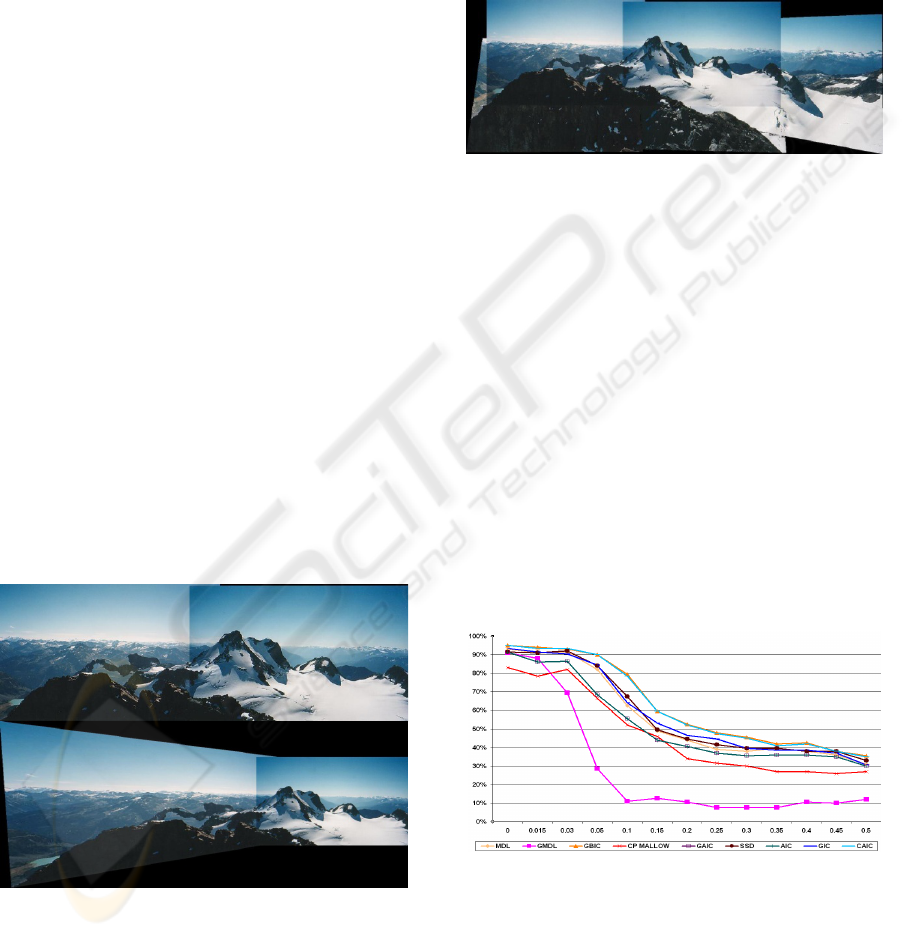
The performances of each criterion for different
noise levels are shown in
Figure 3. As can be seen
from this figure, all criteria perform about 90% until
the noise level reaches to 3% of noise. This means
for example, if a pixel coordinate is 100, then up to 3
pixels matching error is well tolerated. As a result,
we used CAIC in our experiments. The success rate
(correct prediction) of each criterion in accurately
recovering the underlying transformation model
between all corresponding images is shown. As can
be seen from this figure, GBIC and CAIC perform
very similarly and have better performance than
other criteria. The next choices are GIC, SSD and
MDL.
4 MAKING PANORAMA
Figure 1: (top) The panorama image using the true model
chosen by CAIC (translation model)- (bottom) the
panorama image using a wrong model (projective). The
difference between these two panorama images shows the
importance of model selection.
On account of registering images for building wide
view panorama images, we used the transformation
computed by the robust model based method. In
figure 1, we show the importance of model selection
by applying the right model (translation here) and a
wrong model (projective) to two images taken at
different viewpoints. Fig 2 is a sample of panorama
image with five images.
Figure 2: Another sample of the panorama images we
created.
5 CONCLUSIONS
We proposed a model-based image registration
method capable of detecting the true transformation
model. We used a robust method to detect the scale
of noise and reject false correspondences. The
proposed algorithm is robust to degeneracy as any
degeneracy is detected by the model selection
component. Another contribution of this paper is the
evaluation of nine different model selection criteria
for image registration based on different levels of
noise. We conclude that CAIC, GBIC slightly
outperform other criteria. The next choices are GIC,
SSD and MDL. Finally, we made panorama images,
which show the success of this algorithm.
Figure 3: Percentage of success of different model
selection criteria versus different noise levels.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
444

REFERENCES
Akaike, H. 1974. "A New Look at the Statistical Model
Identification." IEEE Transactions on Automatic
Control AC-19(6):716-723.
Bab-Hadiashar, A. and D. Suter. 1999. "Robust
Segmentation of Visual Data Using Ranked Unbiased
Scale Estimate." ROBOTICA, International Journal of
Information, Education and Research in Robotics and
Artificial Intelligence 17:649-660.
Bay, Herbert, Tinne Tuytelaars and Van Luc Gool. 2006.
"SURF: Speeded Up Robust Features." In
Proceedings of the 9th European Conference on
Computer Vision (ECCV06).
Bozdogan, H. 1987. "Model Selection and Akaike's
Information Criterion (AIC): The General Theory and
Its Analytical Extentions." Psychometrica 52:345-370.
Chickering, D. and D. Heckerman. 1997. "Efficient
Approximation for the Marginal Likelihood of
Bayesian Networks with Hidden Variables." Machine
Learning 29(2-3):181-212.
Gheissari, Niloofar, Bab-Hadiashar,Alireza. Dec. 2003.
"Model Selection Criteria in Computer Vision: Are
They Different?" In Proceedings of Digital Image
Computing Techniques and Applications(DICTA
2003). Sydney,Australia.
Kanatani, K. 2000. "Model Selection Criteria for
Geometric Inference." In Data Segmentation and
Model Selection for Computer Vision: A statistical
Approach, ed. A. and Suter Bab-Hadiashar, D.:
Springer-verlag.
Kanatani, K. Jan. 2002. "Model Selection for Geometric
Inference." In The 5th Asian Conference on Computer
Vision. Melbourne, Australia.
Lowe, David. 2004. "Distinctive image features from
scale-invariant keypoints, cascade filtering approach."
International Journal of Computer Vision 60:91 - 110.
Mallows, C. L. 1973 "Some Comments on CP."
Technometrics 15(4):661-675
Rissanen, J. 1978. "Modeling by Shortest Data
Description Automata." 14:465 - 471.
Rissanen, J. 1984. "Universal Coding, Information,
Prediction and Estimation." IEEE Transactions on
Information Theory 30(4):629-636.
Szeliski, Richard. September 2004. "Direct (pixel-based)
alignment." In Image Alignment and stitching.
Priliminary draft. Edition. Microsoft Research.
Torr, P.H.S. 1998. "Model Selection for Two View
Geometry: A Review." In Model Selection for Two
View Geometry: A Review. Microsoft Research,
USA: Microsoft Research, USA.
Yang, Gehua, Charles V. Stewart, Michal Sofka and Chia-
Ling Tsai. 2006. "Automatic Robust Image
Registration System: Initialization, Estimation and
Decision." In Proceedings of the Forth IEEE
International Conference on Computer Vision Systems
(ICVS 2006).
Zitova, B. Flusser J., 2003. "Image Registration methods:
A Survey, Image and Vision Computing." 21:97
Hartley, R. Zisserman, A. 2004. “Multiple View Geometry
in Computer Vsion “(2nd Edition ed.). Cambridge
University Press.
MODEL BASED GLOBAL IMAGE REGISTRATION
445
