
TEXT DETECTION WITH CONVOLUTIONAL NEURAL
NETWORKS
Manolis Delakis and Christophe Garcia
Orange Labs, 4, rue du Clos Courtel, 35512 Rennes, France
Keywords:
Image understading, Neural networks, Text detection, Pattern recognition.
Abstract:
Text detection is an important preliminary step before text can be recognized in unconstrained image envi-
ronments. We present an approach based on convolutional neural networks to detect and localize horizontal
text lines from raw color pixels. The network learns to extract and combine its own set of features through
learning instead of using hand-crafted ones. Learning was also used in order to precisely localize the text lines
by simply training the network to reject badly-cut text and without any use of tedious knowledge-based post-
processing. Although the network was trained with synthetic examples, experimental results demonstrated
that it can outperform other methods on the real-world test set of ICDAR’03.
1 INTRODUCTION
Any text appearing in an image can provide useful
information for the task of automatic image annota-
tion and other related problems. In order to recognize
this text, we first need to detect the real text area in-
side the image and separate it from the background.
In simplified scenarios of uniform background, text
detection is straightforward and can be accomplished
with simple image thresholding or color clustering. In
cases, however, of cluttered background and free en-
vironments, detecting text is a challenging task as the
image background and the text itself as well are un-
predictable.
A survey on text detection can be found in (Jung
et al., 2004). One can notice that the main effort is
focused in finding out a sophisticated set of edge or
texture-based features for a robust discrimination be-
tween text and non-text patterns. For instance, edgel
features (Garcia and Apostolidis, 2000) that measure
the density of oriented lines in an image portion have
been proposed. The final classification on top of
these features is performedby adaptivethresholds and
by imposing knowledge-based geometric constraints.
With the rise of robust and efficient machine learn-
ing techniques the tedious task of finding appropri-
ate thresholds for an increasing number of features
has been replaced by learning-based classifiers. Mul-
tilayer perceptrons (MLPs), for instance, have been
used on top of wavelet features (Li et al., 2000) or
Support Vector Machines (SVMs) on top of a care-
fully selected set of features (Lucas et al., 2005; Chen
et al., 2004).
What is common in the above approaches, is that
text detection is considered as a two-phase process
where, firstly, the engineer has to manually select an
appropriate set of features and, in the second step,
learning takes place. The introduction of learning also
in the first phase is a challenging task as image pix-
els result into high-dimensional input spaces, while
the text pattern does not have any specific spatial dis-
tribution. In a simplified scenario, (Jung, 2001) used
3-layered MLPs that take input from 13×10 image ar-
eas and a separate arbitration stage for the final clas-
sification.
In this study, we propose the use of convolu-
tional neural networks, introduced by (LeCun et al.,
1998), for text detection directly from raw color pix-
els. In this advanced MLP architecture, feature ex-
traction and classification are performed jointly in one
step. The relative features and their combinations are
learned by examples via the back-propagation algo-
rithm. In addition to the automatic feature extraction,
we also put emphasis on the good localization of the
290
Delakis M. and Garcia C. (2008).
TEXT DETECTION WITH CONVOLUTIONAL NEURAL NETWORKS.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 290-294
DOI: 10.5220/0001079902900294
Copyright
c
SciTePress
Input
RGB
64x36
PlaneR
PlaneG
PlaneB
C1
60x32
S1
30x16
C2
28x14
S2
14x7
N1
N2
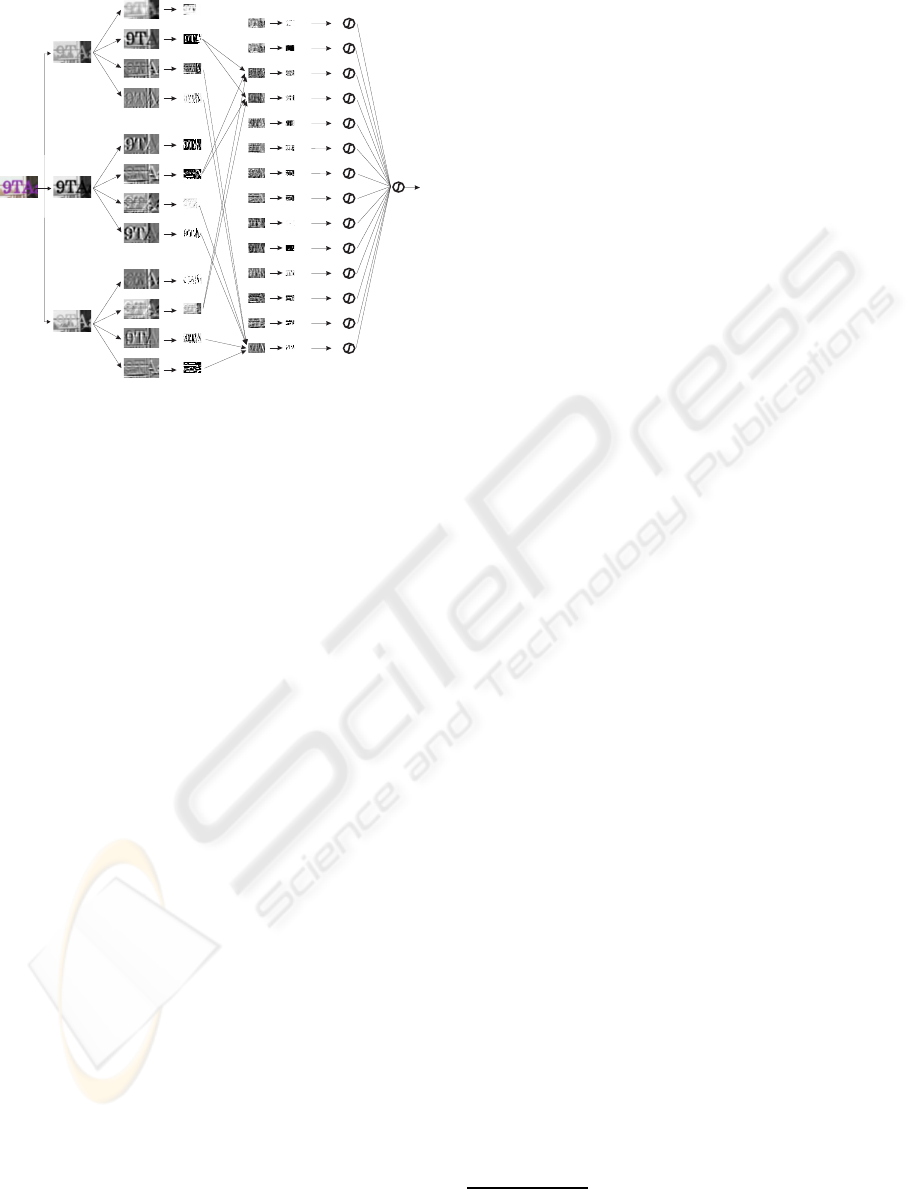
Figure 1: Illustration of the proposed network topology.
Not all the connections between the layers S1 and C2 are
depicted. The contents of the feature maps provide a visu-
alization of the real features extracted from the input image,
after training has been accomplished.
text lines by the network itself, instead of applying
a set of tedious geometric constraints and local im-
age processing. This was achieved by training the
network to reject badly localized text. Even though
we used computer-generated examples in the training
corpus, we present results in real-world settings and
compare with other methods.
The remainder of the paper is organized as fol-
lows. The convolutional topology is presented in sec-
tion 2 and training details in section 3. The way the
network is used to scan for text an image is presented
in section 4. Section 5 reports experimental results
and section 6 concludes this study.
2 NETWORK TOPOLOGY
An illustration of the topology of the convolutional
network is given in Fig. 1. The network receives in
its input plane an RGB image of 64×36 pixels, to be
classified as containing text or not. Before feeding the
network, the image is decomposed to its three color
channels, forming the actual network input, which is
3 64×36 intensity image planes. Their pixel values
are linearly scaled between -1 and +1.
The network employs a series of filters through the
layersC1 to S2 which extract appropriate features and
finally the classification is performed in the last two
layers (N1 and N2). The filters are adjustable and are
learned as legitimate networks weights instead of be-
ing hand-crafted as in other text detection approaches.
Although the image channels are separated in the in-
put layer, features from different channels are fused
long before the final classification stage, between the
layers S1 and C2. In the following, we give a brief de-
scription of the operations performed in each layer of
the convolutional network. For more details, the in-
terested reader is referred to (LeCun et al., 1998) and
(Garcia and Delakis, 2004).
Layer C1 has 12 planes (called feature maps) that
are grouped according to the image channel they pro-
cess, as shown in Fig. 1. Each feature map performs a
convolution over its input plane with a 5×5 trainable
mask. The convolutional layer C1 is then followed by
the subsampling layer S1 in order to enhance the ro-
bustness of the network to input deformations. More
precisely, a local averaging over 2×2 neighborhoods
of C1 is performed, followed by a multiplication with
a trainable coefficient and the addition of a trainable
bias. The final outcome is passed through a sigmoid.
LayerC2 contains 14 convolutionalfeatures maps,
like the ones of C1, connected to some of the feature
maps of the S1 layer. Mixing the outputs of feature
maps helps in extracting more complex information
by combining different features. In addition, robust
features that are extracted in different color bands can
now be fused for subsequent processing. In the pro-
posed topology, each triplet (R
i
, G
i
, B
i
) with i = 1. . . 4
of feature maps in S1 is connected to two feature maps
ofC2. The remaining 6 feature maps ofC2 implement
all the possible combinations of two triplets of S1.
The operation of the S2 and C2 layers is similar
to that of S1 and C1, respectively, with the only dif-
ference that there are 3×3 convolution masks in C2.
Finally, layers N1 and N2 contain standard sigmoid
neurons. Note that each neuron in layer N1 is con-
nected to only one S2 feature map. Overall, the net-
work of Fig. 1 corresponds to a large topology with
some hundred thousands connections but only with
2,319 adjustable weights. This special design results
to built-in robustness to input deformations and to in-
creased network generalization capabilities.
3 NETWORK TRAINING
In order to gather example text images, we used the
ImageMagick
1
tool to artificially create a large cor-
pus of 100,800 examples with varying background,
text font and text color. Some of them are depicted
in Fig. 2.a. The background can be a randomly se-
lected color or a random image portion. In addition to
1
An image processing software that allows printing text
on images, http://www.imagemagick.org
TEXT DETECTION WITH CONVOLUTIONAL NEURAL NETWORKS
291

a
b
c
Figure 2: Image examples (a) with text, (b) without or
badly-cut text, and (c) gathered during bootstrapping.
the positive examples of text images, we created a set
of negative examples with random parts of scenery
images. We added to this a number of images con-
taining multiline or badly-cut text in order to boost
the network in precisely localizing the text when it is
used to scan an image (section 4). A total number
of 64,760 negative examples was thereby produced.
Some of them are depicted in Fig. 2.b. Finally, in or-
der to check the generalization of the network during
training, a validation set containing 10,640 positive
and an equal number of negative examples was cre-
ated with the same method as for the training set.
The network was trained with the standard back-
propagation algorithm. Target responses were fixed
to -1 for negative and +1 for positive examples. The
rejection ability of the network was boosted with a
bootstrapping procedure: after some training cycles,
false alarms are gathered by running the network on a
set of scenery images. These false alarms are added to
the set of negative examples and then training goes on
until convergenceis noticed. Some of the false alarms
gathered are shown in Fig. 2.c. Due to bootstrapping,
the set of negative examples was augmented to a to-
tal number of 114,407 examples. The network was
finally able to correctly classify 96.45% of the pos-
itive examples and 97.01% of the negative ones on
the (augmented) training set. Regarding the valida-
tion set, the figures are similar (95.84% and 97.45%,
respectively).
4 IMAGE SCANNING
We describe in this section how the trained convolu-
tional network is used to scan an entire input image in
order to detect horizontal text lines of any height that
may appear at any possible image location.
In order to detect text at varying height, the input
image is repeatedly subsampled by a factor of 1.2 to
construct a pyramid of different scales. The network
is applied to any slice (scale) of this pyramid individ-
ually. As the neural network uses convolutional ker-
nels at its first layers, instead of feeding the network
at each possible image location, we can apply the net-
work filters to the entire pyramid slice at once, thus
saving a lot of computation time. This filtering pro-
cedure will provide the network responses as if it was
applied at each image position with a step of 4 pix-
els in both directions, as two subsampling operations
take place (in layers S1 and S2).
In the next step of the scanning procedure, the re-
sponses collected at each scale are grouped accord-
ing to their proximity in scale and space to form a
list of candidate targets. The horizontal extension of
a group is determined by the left and right extremes
of the group, while the scale is averaged. Cases of
multiline text are easily discarded in favour of the ac-
tual text lines that constitute it because the network is
trained to reject multiline text.
Finally, the rectangles of the candidates are in-
spected individually by forming local image pyra-
mides around them and applying the network at each
slice with step 1 in both directions in order to mea-
sure more effectively the density of the positive acti-
vations. The candidates that score low average activa-
tion are considered as false alarms and are rejected.
5 EXPERIMENTAL RESULTS
We tested our approach on the ICDAR’03robust read-
ing competition corpus (Lucas et al., 2005). It comes
with a training set of 258 images and a test set of 251
images, all of them manually annotated. The corpus
contains exclusively scene text, i.e., text that naturally
appears in an image. Although our method uses syn-
thetic examples that simulate superimposed text, we
provide experimental results in the ICDAR’03 test set
in order to test the generalization capabilities of the
network and to compare with other methods.
Based on the performance on the training set of
the corpus, we fixed the threshold on the average ac-
tivation for false alarm rejection to 0.12 and confined
our search for text in the range of 36 to 480 pixels
high. Our method detects entire text lines while the
ground truth of the corpus annotates every word sep-
arately (even if it consists of a single letter). This
would cause reporting unfair detection rates. Thus,
we followed the performance metric of Wolf (Lucas
et al., 2005) to compare the rectangles of the detected
text of our method to the rectangles of the ground
truth. This metric takes into account one-to-manycor-
respondences between the detected rectangles and the
annotated ones.
Results are reported in table 1, in terms of preci-
sion and recall rates. The third column gives the stan-
dard f-measure, which combines precision and recall
rates in one measurement (see (Lucas et al., 2005)
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
292

Table 1: Experimental results in the ICDAR’03 test set and
comparison with other methods.
System Precision Recall f Detected
HWDavid 0.43 0.52 0.47 1916
Ashida 0.53 0.41 0.46 1515
Wolf 0.21 0.52 0.30 3477
Todoran 0.14 0.18 0.16 1368
ConvNN 0.54 0.61 0.57 751
for an exact definition). The fourth column of the
table reports the total number of detected rectangles
for each method. Ashida uses fast color-based target
detection, supported by SVMs at a verification stage.
Wolf uses SVMs on top of a set of edge and geometric
features. The systems of HWDavid and Todoran are
based on image edge filtering, morphological opera-
tions and other features, followed by geometric con-
straints. The last row of the table reports results of the
proposed method. For all the methods, the reported
results refer to the Wolf performance metric.
We see in table 1 that the proposed approach outper-
forms the other systems with 54% and 61% precision
and recall rates, correspondingly, and with an f score
of 57%. What is remarkably different is the number
of detected rectangles (751) that are produced by the
convolutional network. This is partly due to the fact
that our scanning strategy detects complete text lines
(and so fewer rectangles), partly due to the nice re-
jection capabilities of the network that result in fewer
false alarms.
Some results of the proposed approach are shown in
Fig. 3. We notice that the network is able to detect
scene text that is slightly rotated and to separate mul-
tiline text. Although the false alarm rate is low, some
patterns like the piano keys we see in the figure are
difficult to reject as they resemble to a series of text
characters. The network may miss some text which
does not contain a lot of characters and thus cannot
occupy a significant place inside its retina.
Regarding computational cost, the proposed sys-
tem can process a 768×576 image in 1.25 seconds
using a Xeon processor at 3.0 Ghz and searching in
the range from 36 to 480 of font sizes.
6 CONCLUSIONS
We havepresented in this study a convolutional neural
network-based text detection system that learns to au-
tomatically extract its own feature set instead of using
a hand-crafted one. Furthermore, the network learned
not only to detect text in its retina, but also to reject
multiline or badly localized text. Thus, the exact text
Figure 3: Some result of the proposed approach on the
ICDAR’03. test set.
localization does not require any tedious knowledge-
based post-processing. Even though the network was
trained with synthetic examples, experimental results
demonstrated that it can compete with other methods
in a real-world test set. Future work includes the in-
spection of the text binarization and recognition prob-
lems with convolutional neural networks.
REFERENCES
Chen, D., Odobez, J.-M., and Bourlard, H. (2004). Text
detection and recognition in images and video frames.
Pattern Recognition, 37(5):595–608.
Garcia, C. and Apostolidis, X. (2000). Text detection and
segmentation in complex color images. In Proceed-
ings of ICASSP’00, pages 2326–2329, Washington,
DC, USA. IEEE Computer Society.
Garcia, C. and Delakis, M. (2004). Convolutional face
finder: A neural architecture for fast and robust face
detection. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 26(11):1408–1423.
Jung, K. (2001). Neural network-based text loca-
tion in color images. Pattern Recognition Letters,
22(14):1503–1515.
Jung, K., Kim, K. I., and Jain, A. (2004). Text informa-
tion extraction in images and video: a survey. Pattern
Recognition, 37(5):977–997.
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Li, H., Doermann, D., and Kia, O. (2000). Automatic text
detection and tracking in digital videos. IEEE Trans-
actions on Image Processing, 9(1):147–156.
TEXT DETECTION WITH CONVOLUTIONAL NEURAL NETWORKS
293

Lucas, S., Panaretos, A., Sosa, L., Tang, A., Wong, S.,
Young, R., Ashida, K., Nagai, H., Okamoto, M., Ya-
mamoto, H., Miyao, H., Z., J., Ou, W.-W., Wolf, C.,
Jolion, J.-M., Todoran, L., Worring, M., and Lin, X.
(2005). ICDAR 2003 robust reading competitions:
entries, results, and future directions. International
Journal on Document Analysis and Recognition, 7(2-
3):105–122.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
294
