
KLT TRACKING USING INTRINSIC AND EXTRINSIC CAMERA
PARAMETERS IN CONSIDERATION OF UNCERTAINTY
Michael Trummer, Joachim Denzler
Chair for Computer Vision, Friedrich-Schiller University of Jena, Ernst-Abbe-Platz 2, 07743 Jena, Germany
Christoph Munkelt
Optical Systems, Fraunhofer IOF, Albert-Einstein-Strasse 7, 07745 Jena, Germany
Keywords:
Feature tracking, epipolar geometry, 3D reconstruction.
Abstract:
Feature tracking is an important task in computer vision, especially for 3D reconstruction applications. Such
procedures can be run in environments with a controlled sensor, e.g. a robot arm with camera. This yields
the camera parameters as special knowledge that should be used during all steps of the application to improve
the results. As a first step, KLT (Kanade-Lucas-Tomasi) tracking (and its variants) is an approach widely
accepted and used to track image point features. So, it is straightforward to adapt KLT tracking in a way
that camera parameters are used to improve the feature tracking results. The contribution of this work is an
explicit formulation of the KLT tracking procedure incorporating known camera parameters. Since practical
applications do not run without noise, the uncertainty of the camera parameters is regarded and modeled within
the procedure. Comparing practical experiments have been performed and the results are presented.
1 INTRODUCTION
1.1 Problem Statement and Motivation
The 3D reconstruction of objects from digital images
is a still unsolved problem, that has an important role
for many industrial applications. Especially hardware
systems containing a sensor mounted on a controlled
element (robot arm or equivalent), yielding positional
sensor parameters, are widely used (cf. (Kuehmstedt
et al., 2001)). Using this kind of set-up, it is shown
(Wenhardt et al., 2006) that the reconstruction result
can be improved, if the reconstruction process is em-
bedded in a next best view planning approach. But
without active illumination, all these reconstruction
methods suffer from the correspondence problem, i.e.
the identification of image points mapped from one
3D world point.
For a pair of stereo images and known camera
(intrinsic and extrinsic) parameters, stereo matching
may be performed by scanning the other image’s cor-
responding horizontal line for one point within the
rectified image pair. But the above mentioned appli-
cations for 3D reconstruction provide video streams
by nature. Thus, feature point tracking is the way
most commonly used to collect image point corre-
spondences (like in (Wenhardt et al., 2006)) within the
image sequence. These feature point tracking meth-
ods, like KLT tracking, have been developed with re-
spect to the structure-from-motion approach. There-
fore, they ignore camera parameters.
All feature point tracking methods aim to find
the mappings of one 3D world point into several im-
ages. Without any knowledge of the camera poses
or without using that knowledge, tracking algorithms
are bound to work appearance-based only. KLT track-
ing is doing so by minimizing the sum of squared er-
rors between the pixel intensity values of two patches
(small image regions). There is no reference to the
corresponding 3D world point at all, and hence, the
well-known motion drift problem (Rav-Acha and Pe-
leg, 2006) can occur. In addition, a lot of care has
to be taken for the selection of good features to track
(Shi and Tomasi, 1994).
Addressing the mentioned problems is the contri-
bution of this paper. This is done by explicitly incor-
porating knowledge about the camera (intrinsic and
extrinsic parameters) into the parameterization and
optimization process of KLT tracking. The search
space for patches in consecutive frames is restricted
346
Trummer M., Denzler J. and Munkelt C. (2008).
KLT TRACKING USING INTRINSIC AND EXTRINSIC CAMERA PARAMETERS IN CONSIDERATION OF UNCERTAINTY.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 346-351
DOI: 10.5220/0001082403460351
Copyright
c
SciTePress

by the epipolar constraint. Hence, the above men-
tioned ways to establish point correspondences are
merged in order to create a new solution to the corre-
spondence problem for 3D reconstruction with a con-
trolled sensor.
The remainder of the paper is organized as fol-
lows. In section 2 the parameterization and optimiza-
tion process of KLT tracking is described. The incor-
poration of the epipolar constraint (by using intrinsic
and extrinsic camera parameters as prior knowledge)
is demonstrated in section 3. Section 4 shows, how
the uncertainty of the epipolar geometry is given at-
tention to and modeled within the extended tracker.
Experimental results are demonstrated in section 5,
and the paper is concluded in the last section.
1.2 Literature Review
The original idea of tracking features by an itera-
tive optimization process was presented by Lucas
and Kanade in (Lucas and Kanade, 1981). Since
then a rich variety of adaptations and extension has
been published, giving rise to surveys like (Baker and
Matthews, 2004). (Fusiello et al., 1999) deal with the
removal of spurious corespondences by using robust
statistics. The problem of reselection of the template
image is dealt with in (Zinsser et al., 2005).
Since these modifications and extensions are inde-
pendent from applying camera parameters, only very
few of them are mentioned. For more information
the reader may be referred to (Baker and Matthews,
2004).
2 KLT TRACKING
In this section the basic equations of KLT tracking are
derived and summarized as far as needed for the re-
mainder of the paper. This can also be found in (Baker
and Matthews, 2004).
Under the assumptions of constant image bright-
ness (see (Cox et al., 1995)) and a small baseline
between consecutive frames, the pixel-wise sum of
squared intensity differences between small image re-
gions (patches) T(x) from the first image and I(x)
from the second image defines an error ε. The func-
tions T(x) and I(x) yield the intensity values at pixel
position x = (x, y)
T
in the respective image region P.
Now, the error ε is parameterized by a vector p. The
entries of this vector are used for the defined geomet-
rical warping W(x, p) from T(x) to I(W(x, p)). Thus,
the error is
ε(p) =
∑
x∈P
(I(W(x, p))− T(x))
2
. (1)
The warping function W(x, p) may perform differ-
ent geometrical transformations. Common choices
are pure translation (thus, p = (p
1
, p
2
)
T
containing
two parameters for translation within the image plane,
namely in image x- and y-direction), affine transfor-
mation (six parameters) or projective transformation
(eight parameters).
Within the iterative optimization process, where
an initial allocation of p is already known, equation
(1) is reparameterized with ∆p to
ε(∆p) =
∑
x∈P
(I(W(x, p+ ∆p))− T(x))
2
, (2)
also known as compositional approach. In order to
solve for ∆p, two first-order Taylor approximations
are performed, yielding (for details the reader is re-
ferred to (Baker and Matthews, 2004))
ε
′
(∆p) =
∑
x∈P
(I(W(x, p)) + ∇I
∂W(x, p)
∂p
∆p− T(x))
2
,
(3)
where
∂W(x,p)
∂p
is the Jacobian of W(x, p), with
ε(∆p) ≈ ε
′
(∆p). For the purpose of minimization, the
first derivative of equation (3) is set to zero. Hence,
the optimization rule is
∆p = H
−1
∑
x∈P
∇I
∂W(x, p)
∂p
T
(T(x) − I(W(x, p)))
(4)
with the Hessian
H =
∑
x∈P
∇I
∂W(x, p)
∂p
T
∇I
∂W(x, p)
∂p
. (5)
By equation (4) an optimization rule is defined for
computing p
i+1
from p
i
, namely p
i+1
= p
i
+ ∆p.
3 USING INTRINSIC AND
EXTRINSIC CAMERA
PARAMETERS
In this section the reparameterization of the warp-
ing function W(x, p) by using camera parameters
(intrinsic and extrinsic) as prior knowledge is de-
scribed. The additional knowledge is used to com-
pute the epipolar geometry (cf. (Hartley and Zisser-
man, 2003)) of consecutive frames. Then the transla-
tional part of the warping function is modified so that
the template patch can only be moved along the cor-
responding epipolar line. With respect to clarity and
KLT TRACKING USING INTRINSIC AND EXTRINSIC CAMERA PARAMETERS IN CONSIDERATION OF
UNCERTAINTY
347

w.l.o.g. the warping function is assumed to perform a
pure translation, since the modifications do not affect
the affine or projectivepart of the transformation. The
treatment of affine and projective parameters remains
the same as for the standard KLT tracker.
For the computation of the fundamental matrix
F from camera parameters the reader is referred to
(Hartley and Zisserman, 2003). Once calculated, the
position of a point x in the first image can be restricted
to the corresponding epipolar line l = (l
1
, l
2
, l
3
)
T
in
the second image. The epipolar line l is given by
l = F
˜
x with
˜
x = (x, y, 1)
T
. A parameterized form of
this line is
l(λ) =
−l
3
l
1
0
+ λ
−l
2
l
1
(6)
with parameter λ. Thus, for pure translation the new
epipolar warping function is given by
W
E
(x, p) =
−l
3
l
1
− λl
2
λl
1
, (7)
using l = F
˜
x and p = λ. In the case of l
1
being
close to zero, another parameterization of l has to be
used. Equation (7) shows the reparameterization of
the translational transformation regarding the epipolar
constraint. The Jacobian of this expression is simply
∂W
E
(x, p)
∂p
=
∂W
E,x
(x,p)
∂λ
∂W
E,y
(x,p)
∂λ
!
=
−l
2
l
1
. (8)
Using equation (8) in the optimization rule from
equations (4) and (5), the adaptation to the case of
known camera parameters is reached. For the mo-
ment, the translation of a pixel between two frames
is strictly limited to the movement along the corre-
sponding epipolar line (expressed by parameter λ), re-
ducing the optimization search space by one degree of
freedom.
4 IN CONSIDERATION OF
UNCERTAINTY
Up to now, the warping function for one pixel is only
allowing for movements on the corresponding epipo-
lar line. But with respect to noisy camera parameters
and to discretization, a possible deviation from the
epipolar line has to be modeled. This section shows a
way to incorporate uncertainty into the parameteriza-
tion and into the optimization process from equation
(4).
For the mentioned, obvious reasons the restriction
of moving only along the epipolar line has to be soft-
ened. This can be achieved by allowing movement
perpendicular to the epipolar line. But, with these
two linearly independent directions, the search space
again covers the whole image plane, which seems to
neutralize any advantages reached by the reduction of
the number of parameters. Consequently, some mech-
anism to control the single translational parts (perpen-
dicular to / along the epipolar line) has to be added.
This is achieved by a weighting factor w ∈ [0, 1],
called epipolar weight, controlling the amounts of ac-
cepted parameter changes.
With respect to uncertainty the modified epipolar
warping function is
W
EU
(x, p) =
−l
3
l
1
− λ
1
l
2
+ λ
2
l
1
λ
1
l
1
+ λ
2
l
2
, (9)
with l = F
˜
x, p = (λ
1
, λ
2
)
T
and the Jacobian
∂W
EU
(x, p)
∂p
=
∂W
EU,x
(x,p)
∂λ
1
∂W
EU,x
(x,p)
∂λ
2
∂W
EU,y
(x,p)
∂λ
1
∂W
EU,y
(x,p)
∂λ
2
!
=
−l
2
l
1
l
1
l
2
. (10)
Applying this to the rule from equations (4) and (5),
nearly the original optimization is performed, but
with the exception of translating along and perpen-
dicular to the corresponding epipolar line and not in
image x- and y-direction (for the general case). The
epipolar constraint respecting uncertainty is achieved
by adding to the optimization rule a weighting matrix
A
w
=
w 0
0 1− w
(11)
that controls the amount (within each dimension) of
the calculated ∆p that is accepted, finally. The modi-
fied optimization rule is
∆p
EU,w
= A
w
H
−1
EU
S
EU
(12)
with H
EU
given by expression (5) with the substitu-
tion from equation (10) and
S
EU
=
∑
x∈P
∇I
∂W
EU
(x, p)
∂p
T
(T(x)−I(W
EU
(x, p))).
(13)
By this specification, the change of translational
parameters is optimized with respect to the epipo-
lar geometry. Changes along the epipolar line are
accepted with weight w (perpendicular with weight
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
348
1 − w) within each optimization step. For the hypo-
thetical case of a perfectly accurate epipolar geome-
try, w = 1 could be used, resulting in the optimization
rule described in section 3. The automatic computa-
tion of w has not been explored, yet. There might be
a way to yield w with respect to the uncertainty of the
epipolar line calculated from noisy camera parame-
ters.
5 EXPERIMENTAL RESULTS
This section shows experimental results. The stan-
dard KLT tracker is compared to the modified tracker
described in this work in terms of tracking accuracy
and mean trail length of tracked points in an image
sequence. As warping function both trackers use the
respective variants of pure translation (x-/y-direction,
λ
1
-/λ
2
-direction). The performance of the modified
tracker is tested with respect to the epipolar weight w.
5.1 Trail Length Evaluation
For this experiment an image sequence has been
recorded. The calibrated camera was mounted on the
hand of a Staeubli RX90L robot arm providing the
extrinsic parameters. The image sequence consisted
of 21 frames, one for the initialization of the tracker
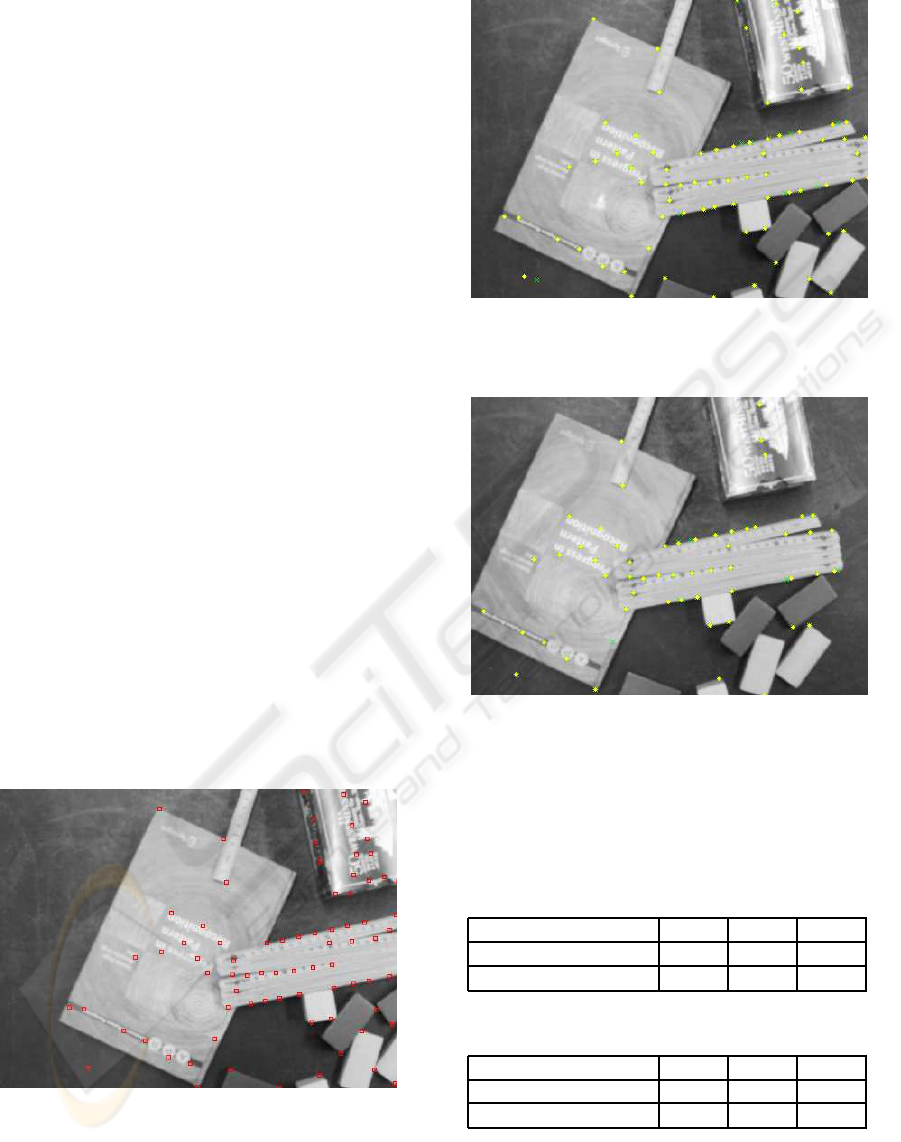
and 20 for tracking. The figures 1 to 3 show some
of the 100 features selected (pictures are cut and en-
larged for visibility reasons) and two tracking steps.
The images are taken from the test run with w = 0.9
set.
Figure 1: Initial frame with 100 image features selected.
The figures show partially different positions of
the tracked features. This effect is quantified in the
next subsection.
For each feature point the trail length (number
of frames in which the point could be tracked) was
Figure 2: Frame 9. Tracked points by standard KLT marked
by light green crosses. Yellow diamonds indicate points of
the modified tracker (w = 0.9).
Figure 3: Frame 20.
stored. From these values the mean trail length and
the variance for all points were computed. The results
are shown in tables 1 and 2.
Table 1: Mean trail lengths and variances with respect to w.
Values for standard tracker: mean 16.07 frames (fr), vari-
ance 27.83 frames
2
.
epipolar weight w 0.5 0.6 0.7
mean trail length (fr) 15.96 16.16 16.18
variance (fr
2
) 28.12 26.97 27.11
Table 2: Continuing table 1.
epipolar weight w 0.8 0.9 0.95
mean trail length (fr) 16.10 16.00 16.04
variance (fr
2
) 26.99 27.74 27.64
The values from tables 1 and 2 show comparable
performance for the aspect of mean trail length. For
w = 0.7 the mean trail length produced by the mod-
ified tracker is about one percent longer then by the
standard KLT tracker.
KLT TRACKING USING INTRINSIC AND EXTRINSIC CAMERA PARAMETERS IN CONSIDERATION OF
UNCERTAINTY
349
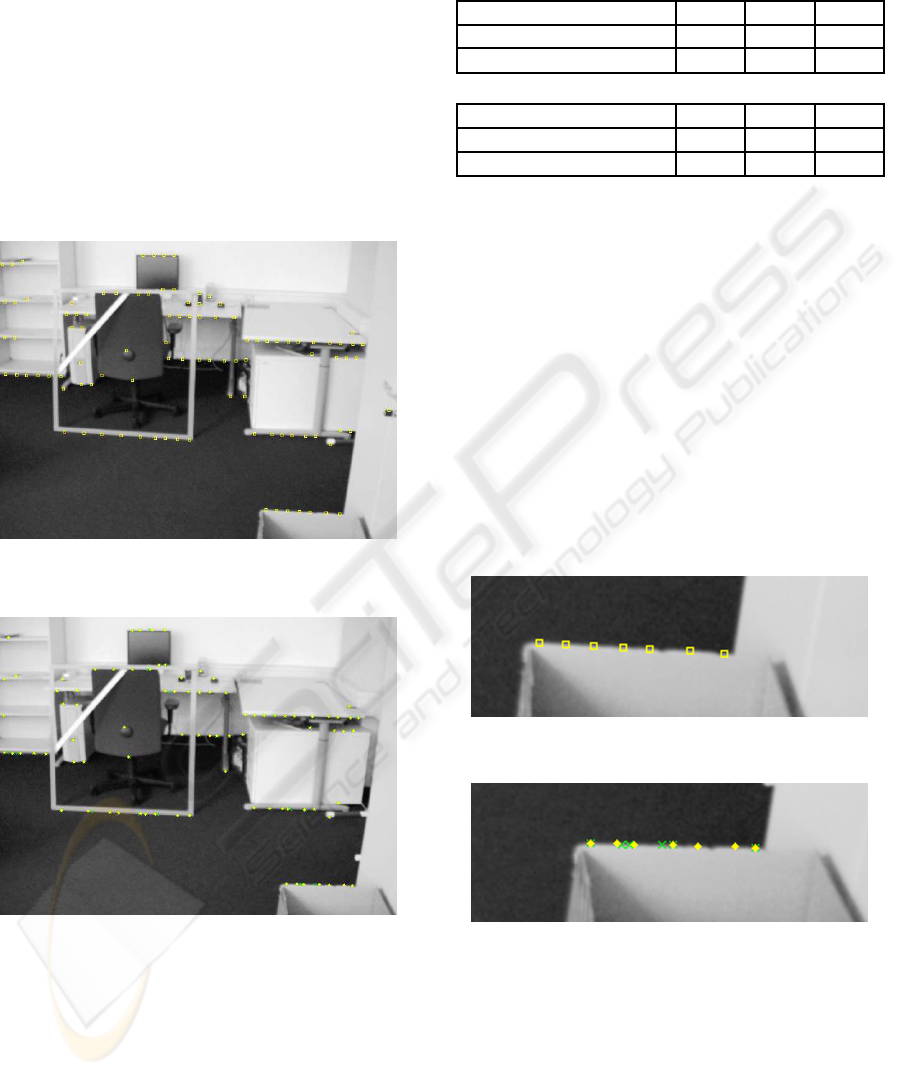
5.2 Accuracy Evaluation
Especially with respect to 3D reconstruction, another
important characteristic of a feature tracker is the ac-
curacy of the tracked feature points. To compare the
accuracy of the modified tracker to the standard KLT
tracker, ground truth information has been generated
for an image pair (figures 4 and 5). The ground truth
correspondences in the second image were blindly
(without knowledge about the tracking results) hand-
marked. Extrinsic camera parameters were calculated
by the method proposed in (Trummer et al., 2006).
Figure 4: First frame with 100 features selected.
Figure 5: Second frame. Again, tracked points by standard
KLT marked by light green crosses. Yellow diamonds indi-
cate points of the modified tracker (w = 0.5).
Especially along edges the results of the track-
ers differ from each other. The tracking accuracy is
expressed in terms of the mean error distance of a
tracked point from its ground truth correspondence.
The variance is also given. Tables 3 and 4 show the
results for different values of w.
With the modified tracker, for each allocation of w
the mean error distance is up to one pixel smaller than
Table 3: Mean error distance with respect to w. Values
for standard tracker: mean 5.84 pixels (px), variance 51.40
pixels
2
.
epipolar weight w 0.5 0.6 0.7
mean error distance (px) 4.78 4.69 4.97
variance (px
2
) 30.52 32.19 39.80
Table 4: Continuing table 3.
epipolar weight w 0.8 0.9 0.95
mean error distance (px) 4.89 5.37 5.39
variance (px
2
) 48.14 52.32 55.98
for the standard KLT tracker. An interesting point is
the error value for w = 0.5. In that case, the modified
optimization in principal does the same as the stan-
dard one. Only the optimization step size is half as
wide (w = 0.5) and the translation is optimized along
directions λ
1
and λ
2
(along/perpendicular to the re-
spective epipolar line). But, already this reparame-
terization of the translation directions has positive in-
fluence on the tracking accuracy. The large variances
are due to point features along edges, where larger er-
rors may occur. But also this negative effect of the
the well-known aperture problem is constricted, if w
is chosen properly. With feature points being tracked
more accurately, the input data for 3D reconstruction
and, thus, the reconstruction result will benefit.
Figure 6: Close-up from figure 4 showing initial features
along edge.
Figure 7: Tracking results as close-up from figure 5. Stan-
dard tracker (points marked by light green crosses) lost one
point, some of the others are drifted along the edge. Mod-
ified tracker (yellow diamonds) found all points and pre-
served point alignment.
The figures 6 and 7 demonstrate more clearly the
differences between the results of the compared track-
ers. By incorporating the epipolar constraint with re-
gard to uncertainty, the modified tracker was able to
find one more point in the illustrated region and to
keep a better alignment of the tracked feature points.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
350

The mean error distance was up to 20 percent smaller
(for w = 0.6) using the modified tracker.
6 CONCLUSIONS AND
OUTLOOK
In this paper we showed a method to modify the well-
known KLT tracker incorporating knowledge about
the extrinsic and intrinsic camera parameters. The ad-
ditional prior knowledge is utilized to reparameterize
the warping function. With respect to noise in prac-
tical applications, uncertainty is modeled within the
optimization rule. While the mean trail length could
only be improved very slightly, the experiments per-
formed show a better accuracy when using the mod-
ified tracker. Remarkable is the fact that the epipolar
optimization directions alone have a positive effect on
the tracking result.
For the future, this modification of the KLT
tracker offers lots of further topics to be investigated.
Setting the weighting factor w to a certain value may
be replaced by an automatic detection concerning the
amount of uncertainty of the camera parameters. We
also think about changing w during the optimization
process.
Another step is the concurrent improvement of ac-
curacy and trail length. At the current stage, accu-
racy is addressed already. When aiming at longer trail
lengths, a closer look at the reasons of losing a feature
has to be taken. One of these reasons, surely, is a too
large error measured (cf. expression (1)) between cor-
responding patches. That means, the selected trans-
formation is not able to model all changes between
the patches within the error bound set. But with re-
gard to the (soft) epipolar constraint of the modified
tracker, this error bound may be raised without the op-
timization process losing its way. Another possibility
to be explored is random jumping along the epipolar
line, when a feature is lost.
REFERENCES
Baker, S. and Matthews, I. (2004). Lucas-kanade 20 years
on: A unifying framework. International Journal of
Computer Vision, 56:221–255.
Cox, I., Roy, S., and Hingorani, S. L. (1995). Dynamic
histogram warping of image pairs for constant image
brightness. IEEE International Conference on Image
Processing, 2:366–369.
Fusiello, A., Trucco, E., Tommasini, T., and Roberto, V.
(1999). Improving feature tracking with robust statis-
tics. Pattern Analysis and Applications, 2:312–320.
Hartley, R. and Zisserman, A. (2003). Multiple View Geom-
etry in computer vision, Second Edition. Cambridge
University Press.
Kuehmstedt, P., Notni, G., Hintersehr, J., and Gerber, J.
(2001). Cad-cam-system for dental purpose – an in-
dustrial application. In The 4th International Work-
shop on Automatic Processing of Fringe Patterns.
Lucas, B. and Kanade, T. (1981). An iterative image regis-
tration technique with an application to stereo vision.
In Proceedings of 7th International Joint Conference
on Artificial Intelligence.
Rav-Acha, A. and Peleg, S. (2006). Lucas-kanade without
iterative warping. In Proceedings of 2006 IEEE Inter-
national Conference on Image Processing.
Shi, J. and Tomasi, C. (1994). Good features to track. In
Proceedings of IEEE Computer Society Conference
on Computer Vision and Pattern Recognition.
Trummer, M., Denzler, J., and Suesse, H. (2006). Precise 3d
measurement with standard means and minimal user
interaction – extended single-view reconstruction. In
Proceedings of 17th International Conference on the
Application of Computer Science and Mathematics in
Architecture and Civil Engineering.
Wenhardt, S., Deutsch, B., Hornegger, J., Niemann, H., and
Denzler, J. (2006). An information theoretic approach
for next best view planning in 3-d reconstruction. In
The 18th International Conference on Pattern Recog-
nition.
Zinsser, T., Graessl, C., and Niemann, H. (2005). High-
speed feature point tracking. In Proceedings of Con-
ference on vision, Modeling and Visualization.
KLT TRACKING USING INTRINSIC AND EXTRINSIC CAMERA PARAMETERS IN CONSIDERATION OF
UNCERTAINTY
351
