
AUTOMATIC SHOT BOUNDARY DETECTION USING
GAUSSIAN MIXTURE MODEL
A. Adhipathi Reddy and Sridhar Varadharajan
Applied Research Group, Satyam Computer Services Ltd.
Keywords: Shot boundary detection, Gaussian mixture model, video analysis.
Abstract: The basic step for video analysis is the detection of shots in a given video. A shot is sequence of frames
captured in a single continuous action in time and space using a single camera. The boundary between two
adjacent shots may be an abrupt change (hard cut) or gradual change. In literature, many shot boundary
detection algorithms have been proposed for detecting the hard cut or gradual changes like fadein/out and
dissolve. The performance of these algorithms degrades with zooming, lighting change conditions, and fast
moving type of videos. In this paper, a novel algorithm based on Gaussian Mixture Model (GMM) is
developed for shot boundary detection. The behavior of GMM with abrupt and gradual change is used for
detection of hard cut, fadein/out and dissolve. Experimental results shows credibility of the proposed
algorithm with zooming, lighting change conditions, and fast moving type of videos.
1 INTRODUCTION
With the overwhelmed collection of videos over
Internet and other video libraries, automatic video
analysis for semantic indexing and retrieval has
emerged as a promising area of research. The
foremost step in any video analysis is the detection
of shots in a video. Some of the common methods
used for detecting the shot boundary (SBD) are pixel
difference, histogram comparison, edge change,
compression ratio, and motion vectors. Performance
comparison of these algorithms can be found in
(Lienhart, 1999).
Zhang et al. (Zhang, 1995) proposed a method
in which block by block difference is used instead of
pixel difference to overcome sensitivity to camera
motion and noise. To improve the performance of
histogram based SBD, Huang et al. (Huang, 2003)
have proposed the use of row and column
histograms in addition to global histogram.
Hardware implementation of the local histogram
based SBD can be found in (Boussaid, 2007).
However, histogram based methods lack spatial
information and are also sensitive to changes in
illumination and noise.
To avoid costly decompression of frames, many
compression domain techniques based on
compression difference or motion vectors (Tardini,
2005) have been proposed. Zabih et al. (Zabih,
1995) have proposed SBD based on determining the
number of incoming and outgoing edge pixels called
edge change ratio (ECR). Hard and gradual changes
are detected by analyzing the characteristics of ECR
time series. To make the SBD algorithm robust,
many researchers have proposed to use multiple
features (Bruyne, 2006) (Fang, 2006). Even though
the performance of these algorithms are better than
histogram and pixel difference based methods, the
complexity in extracting the feature vectors is high
making them less suitable for real time applications.
To overcome the above drawbacks, in this
paper a GMM based shot boundary detection
algorithm is proposed. At each frame, probability
that the present frame fits into the GMM estimated
up to the previous frame is calculated. The
probabilities obtained at each frame are analyzed to
detect hard cut and gradual change. As the GMM are
inherently immune to noise and can handle the
lighting change condition efficiently, the proposed
algorithm can detect the shot boundaries more
efficiently. The remainder of the paper is organized
as follows. Section 2 describes the GMM and the
proposed algorithm. Experimental results are
presented in section 3 and the concluding remarks
are given in section 4.
547
Adhipathi Reddy A. and Varadharajan S. (2008).
AUTOMATIC SHOT BOUNDARY DETECTION USING GAUSSIAN MIXTURE MODEL.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 547-550
DOI: 10.5220/0001084705470550
Copyright
c
SciTePress

2 SHOT BOUNDARY
DETECTION ALGORITHM
In surveillance applications, GMMs are widely in
use for modeling the static background for detecting
the foreground objects (Stauffer, 1999). Mo and
Wilson (Mo, 2004) used multiresolution GMMs to
capture both spatial and statistical aspects of the
video. Based on the log-likelihood derived from the
model, significant scene changes are detected. Next,
we give an introduction to GMM, following which
the proposed algorithm is discussed.
2.1 Gaussian Mixture Model
Gaussian mixture models are the probabilistic
models for representing a distribution. GMM can
also be viewed as a form of generalized radial basis
function network in which each Gaussian
component is a basis function or `hidden' unit. Let us
represent the
th
k Gaussian component in a mixture
model by
()
kk
∑
Ν
,
μ
, where
μ
is the mean value
and
∑ is the variance. The probability that a sample
value
x
belongs to a GMM is given by
()()
∑
=
∑Ν∗=
n
k
kkk
xpwxp
1
,/)(
μ
(1)
where
n is the number of components in a Gaussian
mixture and
k
w is the normalized weight factor
associated with that Gaussian. Gaussian probability
density function for
()
kk
∑
Ν
,
μ
is calculated by
()()
)()(
2
1
2
1
1
exp
2
1
,/
kk
T
k
xx
k
kk
xp
μμ
π
μ
−∑−−
−
∑
=∑Ν
(2)
An expectation-maximization algorithm is used
for fitting the GMM with a given set of training data.
This algorithm is the best approach to train the
stationary data. As the present algorithm is dealing
with time varying data, this maximum likelihood
algorithm is not suitable. Hence, an approximation
to the expectation-maximization is used for updating
the GMM over the time.
2.2 Proposed Method
The algorithm is implemented in compression
domain. Partial decoding of the data is required for
DC value extraction. This is another added
advantage of the proposed algorithm. Each
component is modeled with separate Gaussian
mixture.
GMMs are initialized for each block with first
frame of the sequence. First component of each
GMM is initialized with the DC values
corresponding to R, G, and B as given below
i
DC
i
B
i
DC
i
G
i
DC
i
R
BGR ===
111
μμμ
(3)
where
i
G
i
R 11
,
μμ
and
i
B1
μ
are the mean values of
the first Gaussian.
i
DC
i
DC
GR ,
, and
i
DC
B
are the R, G,
and B DC components of
th
i block. Rest of the
Gaussian components are initialized with zero value.
Weights and variances of all the components are
initialized with initial parameters.
To update the model from frame to frame, for
every block of current frame find the best matching
GMM in
22
×
neighborhood blocks of the previous
frame. The probability of fitting
th
i
block’s DC
value in the previous frame’s
th
j
block GMM is
calculated by distance function
(
)
∑
Σ
−
=
BGR
z
j
zk
j
zk
i
DC
i
zk
k
z
w
jid
,,
2
1
),(
μ
(4)
Equation 4 is approximately equal to the
Mahalanobis distance with off diagonal elements of
covariance matrix zero. Zero off diagonal elements
means, R, G, and B components are independent and
have the same variance.Even though this assumption
is not true, it avoids us to do costly matrix inversion
at the expense of some accuracy. Using equation 4,
find the minimum distance Gaussian component and
corresponding block number as given below
where
j
is the
22
×
neighborhood of
th
i block in
previous frame.
For finding the shot boundary and shot
transition type, count the number of blocks with
d
i
TD >
1
, where
d
T
is the distance threshold. Let us
represent this count with
1
N
. If
1
N
is plotted against
the frame number, it exhibits a different
characteristic for hard cuts, dissolves, and fades as
shown in Figure 1. From Figure 1(a), it can be
observed that, for hard cut the change in the value of
1
N
is sudden. After a sudden change there is a
gradual decrease of
1
N
value in the following
frames as GMM gets updated.
(
)
()
),(minarg
),(minarg
jidl
jidD
k
j
i
k
k
d
i
k
=
=
(5)
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
548
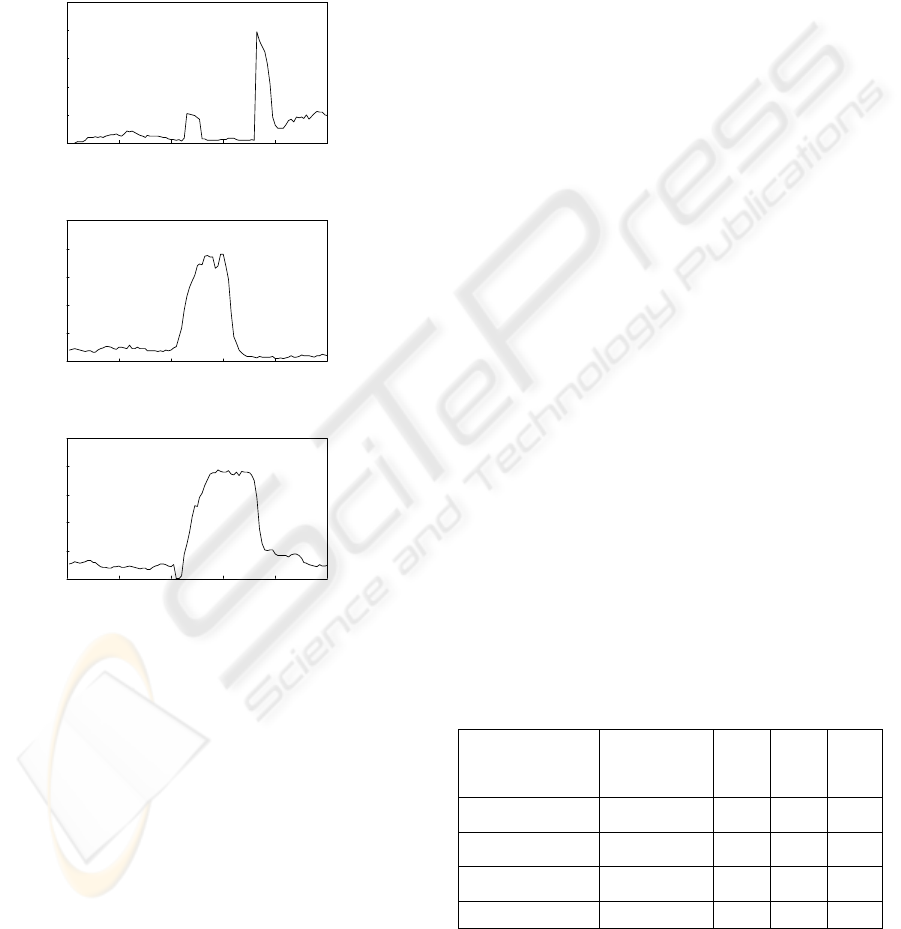
Dissolves type of shot boundary transition
exhibits a bell shape as shown in Figure 1(b). During
the dissolve, the number of blocks with no best fit
GMM increases gradually. After a few frames, as
the GMMs get updated over a few blocks, the
Mahalanobis distance curve decreases gradually. In
case of fade-ins/fade-outs, as DC values
increase/decrease continuously, the blocks without
best fit GMMs peak for a few frames. This looks
like a trapezoidal shape as given in Figure 1(c).
Flickering type of lighting conditions can be
detected by finding
n
NNN ,,,
32
K
for other Gaussian
components similar to that of finding
1
N
. If there is a
sudden change in
1
N
and at the same time if for any
other Gaussian component
k ,
k
N
is less, it is
characterized as flickering.
The updating of GMM of blocks of current
fame is as given in equation 6
()
αα
μαα
α
μ
α
μ
+−=
−+∑−=∑
+−=
−
−
−
1
2
1
1
)1(
)1(
)1(
tt
ttt
tt
ww
I
I
(6)
where I is R, G, or B component and
α
is the
learning rate. If no matching GMM is found, then
assign the spatial corresponding block GMMs of
previous frame and initialize the last component of
GMM with the DC component of the current block.
After updating the GMM, weights are normalized.
Based on the normalized weights, components of
GMM are rearranged.
3 EXPERIMENTAL RESULTS
In this section, performance of the proposed
algorithm is tested with different type of videos. For
initialization of a GMM, initial weight and variance
are taken as 0.2 and 225 respectively. The number of
Gaussian components is selected as 3. Threshold
value
0.1
=
d
T
and
2.0
=
α
is chosen after testing
with different types of videos.
Experimental results with the proposed method are
presented for four different test sequences, namely,
news, documentary, soccer, and basketball. These
sequences are selected as they have lot of zooming,
light changing, and fast moving effects. For all test
sequences, the ground truths are generated manually
with precise location and type of transition. Ground
truth of these sequences is given in Table 1.
Performance of the algorithm is measured by using
three types of measurements:
• Correct detection ratio is the ratio of shot
transitions correctly detected to the actual
number of transitions.
• Miss detection ratio is the ratio of number of
shot transitions not detected to the actual
number of shot transitions.
• False detection ratio is the ratio of number
of shot transitions falsely detected to the
actual number of shot transitions
Table 1: Ground truth of test sequences for hard cut (H),
dissolve (D) and fades (F).
Test sequence Duration
(min)
H D F
N
ews 7.00 44 0 0
Documentary 12.00 87 16 2
Soccer 11.00 45 30 0
Basketball 15.36 95 41 0
0
0.2
0.4
0.6
0.8
1
0 20406080100
frame number
mahalanobis distance
(a) Hard cut
0
0.2
0.4
0.6
0.8
1
0 20406080100
Frame number
Mahalanobis distanc e
(b) Dissolves
0
0.2
0.4
0.6
0.8
1
0 20406080100
frame number
Mahalanobis dis tance
(c) Fades
Figure 1: Typical pattern of Mahalanobis distance vs
frames for hard cut
,
dissolve and fades.
AUTOMATIC SHOT BOUNDARY DETECTION USING GAUSSIAN MIXTURE MODEL
549
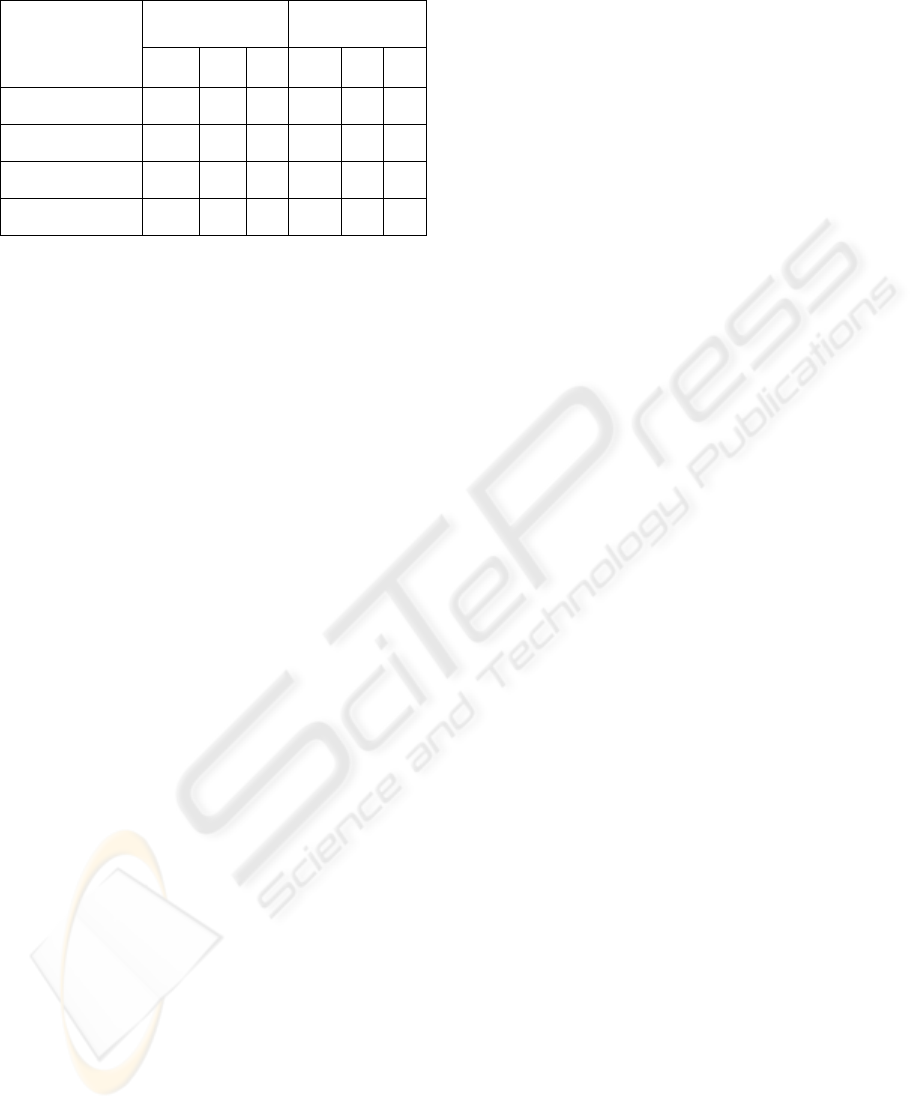
Table 2: Performance results for hard cut (H), dissolve (D)
and fades (F) detection.
The results with the proposed method are presented
in Table 2. From Tables 1 and 2 it can be observed
that hard cut detection ratio is 99.67% while dissolve
detection ratio is 79.3%. Only two fade-outs are
present in the documentary sequence and the two are
detected correctly. Miss detection ratio for hard cut
is 3.32% and for dissolve it is 20.22%. False
detection ratio for hard cut and dissolve are 21% and
9.2% respectively. Results indicate that the
performance of hard cut detection is very high and in
most cases, dissolve detection is also correct. Our
observation is that false detections occur in closeup
shots. Specifically, these can be observed very
prominently in the basketball sequence where
players are showed closely while moving fast.
For the qualitative evaluation of the proposed
method, we refer the results presented with various
algorithms in (Lienhart, 1999). In (Lienhart, 1999),
Lienhart evaluated the best known algorithms and
presented improvements to them. With these
improvements, Lienhart achieved correct and false
detection ratios for hard cut as 95% and 5% and for
dissolve as 80% and 20% respectively. Even though,
out test data is not as big as that Lienhart used, the
results do bring out the merits of our method. As we
have selected by carefully considering the various
types of camera actions and events, the results can
be considered as consistent over a large data set as
well.
4 CONCLUSIONS
This paper presents a novel algorithm for shot
boundary detection using Gaussian mixture models.
Performance of the algorithm is verified by testing
with different types of test sequences. Results
indicate that proposed method can handle zooming,
lighting change, and fast moving scenes effectively.
However, the performance degrades with closeup
shots with fast moving camera action or activity.
These are due to the delay in updating the GMMs.
Handling of these types of problems for reducing the
false detection is considered in part of our on going
work.
REFERENCES
Lienhart, R., 1999. Comparison of automatic shot
boundary detection algorithms. In proc. IS &T/SPIE
Storage and Retrieval for Image and Video Databases
VII. vol. 3656, pp 290-321.
Zhang, H., Kankanhalli, A., Smoliar, S.W., 1995.
Automatic partitioning of full-motion video.
Multimedia Systems. vol. 1, pp. 533-544.
Huang, X., Wei, G., Petrushin, V.A., 2003. Shot boundary
detection and high-level feature extraction for the
TREC video evaluation 2003. NIST TRECVID 2003.
Boussaid, L., Mtibaa, A., Abid, M., Paindavoine, M.,
2007. A real time shot cut detector: Hardware
implementation. Computer Standards & Interfaces.
Vol. 29, Issue 3, Pages 335-342.
Tardini, G., Grana, C., Marchi, R., Cucchiara, R., 2005.
Shot detection and motion analysis for automatic
MPEG-7 annotation for sports video. In Int. Conf. on
Image Analysis and Processing, pp. 653-660.
Zabih, R., Miller, J., Mai, K., 1995. Feature-based
algorithms for detecting and classifying scene breaks.
In Proc. ACM on Multimedia. pp. 189–200,
Bruyne, S.D., Wolf, K.D., Neve, W.D., Verhoeve, P.,
Walle, R.V.D., 2006. Shot boundary detection using
macroblock prediction type information. In Workshop
on Image Analysis for Multimedia Interactive
Services. pp. 205-208.
Fang, H., Jiang, J., Feng, Y., 2006. A fuzzy logic approach
for detection of video shot boundaries. Pattern
Recognition. Vol. 39, , Pages 2092-2100.
Stauffer, C., Grimson, W.E.L, 1999. Adaptive background
mixture models for real-time tracking. In Proc. of Int.
Conf. on Computer Vision and Pattern Recognition.
Vol. 2, pp.246-252.
Mo,X.,Wilson,R.,2004. Video modeling and segmentation
using Gaussian mixture models. In Proc. of Int. Conf.
on Pattern Recognition, Vol. 3, pp 854-857.
Test sequence
Correct
Detection
False Detection
H D F H D F
News 44 0 0 0 0 0
Documentary 87 8 2 10 2 2
Soccer 41 24 0 8 2 0
Basket-ball 90 37 0 39 4 7
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
550
