
A ROBUST AND EFFICIENT METHOD FOR TOPOLOGY
ADAPTATIONS IN DEFORMABLE MODELS
Jochen Abhau
Institut f
¨
ur Informatik, Leopold-Franzens-Universit
¨
at, Technikerstraße 21a, Innsbruck, Austria
Keywords:
Segmentation, deformable model, topology adaptation, homology theory, medical image analysis.
Abstract:
In this paper, we present a novel algorithm for calculating topological adaptations in explicit evolutions of
surface meshes in 3D. Our topological adaptation system consists of two main ingredients: A spatial hashing
technique is used to detect mesh self-collisions during the evolution. Its expected running time is linear with
respect to the number of vertices. A database consisting of possible topology changes is developed in the
mathematical framework of homology theory. This database allows for fast and robust topology adaptation
during a mesh evolution. The algorithm works without mesh reparametrizations, global mesh smoothness
assumptions or vertex sampling density conditions, making it suitable for robust, near real-time application.
Furthermore, it can be integrated into existing mesh evolutions easily. Numerical examples from medical
imaging are given.
1 INTRODUCTION
Since the pioneering work (Witkin et al., 1987), de-
formable models have been used very successfully in
the areas of computer vision and pattern recognition.
In general, one can differ between two classes of de-
formable models: Explicit or parametric models, and
implicit ones.
Implicit models, i.e. level-set techniques, were intro-
duced in (Osher and Sethian, 1988) and further devel-
opments were done in (Caselles et al., 1993). Since
the contour is given as the isosurface of a scalar func-
tion, topology adaptations are handled naturally in
implicit models. Nevertheless, explicit models are of-
ten preferred. This is due to the fact, that the math-
ematical equations are sometimes easier to formu-
late, and user interaction and special geometrical con-
straints can be incorporated easily. However, topolog-
ical transformations are difficult to implement in ex-
plicit (2D or 3D) contour evolutions.
In (McInerney and Terzopoulos, 2000), evolving
polygons in 2D are made topology-adaptive by us-
ing a Freudenthal triangulation of the image plane. A
reparametrization is performed cyclically after a fixed
finite number of iterations of the polygonal evolution
by intersecting the polygon with the Freudenthal tri-
angles. Polygon self-intersections are detected inside
each Freudenthal triangle, and topology adaptations
- if necessary - are obtained by some case distinc-
tions. Similar ideas have already been developed in
(Delingette, 1994). In (Bischoff and Kobbelt, 2004),
the mesh is a-priori restricted to have its vertices on
edges on an underlying two-dimensional grid. If the
number of vertices is large, already in 2D, the evo-
lution is rather time-consuming. This is due to the
fact that vertices must move grid point by grid point.
In (Lachaud and Montanvert, 1999), special restric-
tions on edge lengths and angles in the mesh are im-
posed to detect self-collisions and to adapt topology
in 3D mesh evolutions. Some progress has been made
in (Lachaud and Taton, 2003), (Lachaud and Taton,
2004) and (Lachaud and Taton, 2005) allowing for
less mesh vertices. Nevertheless, global mesh restric-
tions remain which have to be controlled in every iter-
ation step, slowing down the evolution. Furthermore,
self-collisions of the mesh are checked by a distance
field which is time-consuming and not fast enough for
near real time applications, see also (Teschner et al.,
2005). A two-step topology adaptive algorithm has
been proposed in (Abhau et al., 2007), where a stan-
dard active contour evolution is performed first, and
topology is adapted by a postprocessing step after-
wards. In (Pons and Boissonnat, 2007), after each
evolution step the mesh is retriangulated by a re-
stricted Delaunay triangulation in O(n log n) time, n
being the number of mesh vertices. As is reported
there, the performance of this algorithm is in the range
of (Lachaud and Taton, 2005).
To summarize, most of the algorithms mentioned
375
Abhau J. (2008).
A ROBUST AND EFFICIENT METHOD FOR TOPOLOGY ADAPTATIONS IN DEFORMABLE MODELS.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 375-382
DOI: 10.5220/0001085103750382
Copyright
c
SciTePress

above work well in 2D, but in 3D they tend to be very
time-inefficient, because of the additional structure to
be updated and maintained. Furthermore, the topol-
ogy adaptation systems have effects on the mesh evo-
lution and do not run independently.
We propose a topology adaptive active contour al-
gorithm which bases on two novel ingredients:
• For collision detection during mesh evolution, the
image space is subdivided into small axis-aligned
bounding boxes. Every mesh vertex is mapped to
a hash index, depending on the bounding box it
lies in. Intersection tests are performed between
triangles which contain vertices of the same hash
index. By choosing the hash function and the
bounding boxes appropriately, this algorithm runs
linear in the number of vertices.
• For topology adaptation, we delete colliding mesh
parts. The boundaries of these mesh parts are re-
connected by using a database which consists of
reasonable connections. This database is mainly
derived from homology theory. During mesh evo-
lution, possible mesh reconnections are looked up
from the database and by a few triangle-triangle
intersection tests, we decide which one to take.
Since topology adaptations are always performed
locally, the running time for collision detection
dominates, and therefore the running time for the
whole topology adaptation system is linear in the
number of mesh vertices.
1.1 Outline
This paper is organized as follows: In Section 2, we
give a general decription of our novel topology adap-
tation algorithm. In Section 3 we present the colli-
sion detection system. In the next section, we ex-
plain the generation of a database used for topology
adaptations. In Section 5, we summarize the topology
adaptive mesh evolution algorithm. In Section 6, we
provide and discuss experimental results of the new
method in 3D image segmentation. Section 7 con-
cludes the paper.
2 GENERAL DESCRIPTION OF
OUR ALGORITHM
Our algorithm is designed for multiple connected
surfaces in 3D and consists of the following steps:
An active contour model is used to evolve a mesh
until mesh self-collisions are detected. The topology
adaptation is performed and afterwards the active
contour evolution is further continued. In this paper
(a) (b) (c)
Figure 1: In (a), a surface (yellow) has evolved around the
nested ball in the middle. A small tube connects the nested
ball and the outer object. Edges of this tube self-intersect.
The tube is cut in (b). For sake of clarity, only the 2D projec-
tions are drawn. In (c), three mesh parts collide. A handle
has to be inserted between these parts to adapt topology.
we focus on algorithms for detection of self collisions
and topology adaptations. Active contour models are
not discussed further and can for instance be found in
(Chen and Medioni, 1995).
Collision detection is performed by a spatial
hashing algorithm, motivated by (Teschner et al.,
2003):
A hash function is used to index each mesh vertex
according to its position relative to small axis aligned
bounding boxes. Triangles having vertices with the
same hash index are checked for intersection. Since
this test can be performed by iterating through hash
indices, the expected running time for the collision
detection algorithm is linear in the number of vertices
and the hash table size.
Topology adaptation is mainly performed by a
precalculated database of topology changes derived
from homology theory:
The collision detection algorithm computes intersect-
ing triangles. Triangles can collide during an evolu-
tion because of two reasons:
(1) A nested object has been detected, i.e. there is a
smaller object enclosed by a larger one, see Figure
1(a).
(2) Two or more mesh parts are actually forming a
handle, see Figure 1(c).
These two cases can be distinguished by analyz-
ing the positions of the vertices which belong to the
intersecting triangles. Case (1) is treated by cutting
the small tube shown in Figure 1(b). In case (2) we
delete the overlapping triangles, and after some pre-
processing, we obtain a mesh with k holes surrounded
by simple, closed polygons as demonstrated in Fig-
ure 2(a). Among all sets of edges and faces (E,F)
connecting the mesh parts (call them handles), we are
looking for a handle (E
0
,F
0
) such that
(a) (E
0
,F
0
) produces a combinatorially consistent
mesh, i.e.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
376
(a) (b) (c) (d) (e)
Figure 2: In (a), a mesh with three open holes (in yellow) surrounded by simple, closed polygons is shown. It results from
deleting the overlapping mesh parts in Figure 1(c). A possible handle for mesh retriangulation is shown in (b), inserting the
handle results in (c). The same handle can be used to triangulate the caps shown in (d) to a topological sphere in (e).
(i) every edge belongs to the boundary of exactly
two triangles
(ii) every triangle borders exactly three triangles
(iii) all mesh parts are connected to each other
(b) the edges and faces of (E
0
,F
0
) produce an
intersection-free adapted mesh.
It turns out, that condition (a) is just dependent on
k and the number of vertices in each of the k closed
polygons, and independent of the vertex coordinates.
We use this observation for computation of a database
of handles before any mesh evolution. There, for ev-
ery realistic k and realistic vertex numbers of the k
polygons, handles fulfilling condition (a) are stored.
Now during a mesh evolution, a topology change is
simply performed by looking up handles fulfilling (a)
in the database, and choosing one which fulfils (b).
This can be done very efficiently by a fast triangle-
triangle intersection test.
Beforehand generation of the handle database:
Assume that we want to retriangulate k open mesh
parts consisting of λ
1
,. ..,λ
k
vertices, but that the ver-
tex coordinates are unknown. Since the combinatorial
consistency criterion (a) already makes sense in this
(purely combinatorial) situation, we use it for com-
putation of the database. In order to keep the actual
number of stored handles small, we also study the
structure of the database. Both for computation and
for structure analysis, it is useful to reformulate the
combinatorial consistency criterion in mathematical
terms of homology groups. This is done by the fol-
lowing key observation, which is depicted in Figure 2:
Handles for mesh retriangulation, as shown in Figure
2(b)-(c), are the same as handles which connect caps
to spheres, as shown in Figure 2(d)-(e). The caps are
obtained from the open mesh parts. This observation
allows for database generation by standard homology
software, and the database structure can be described
easily by actions of the symmetric group which leave
the homology invariant.
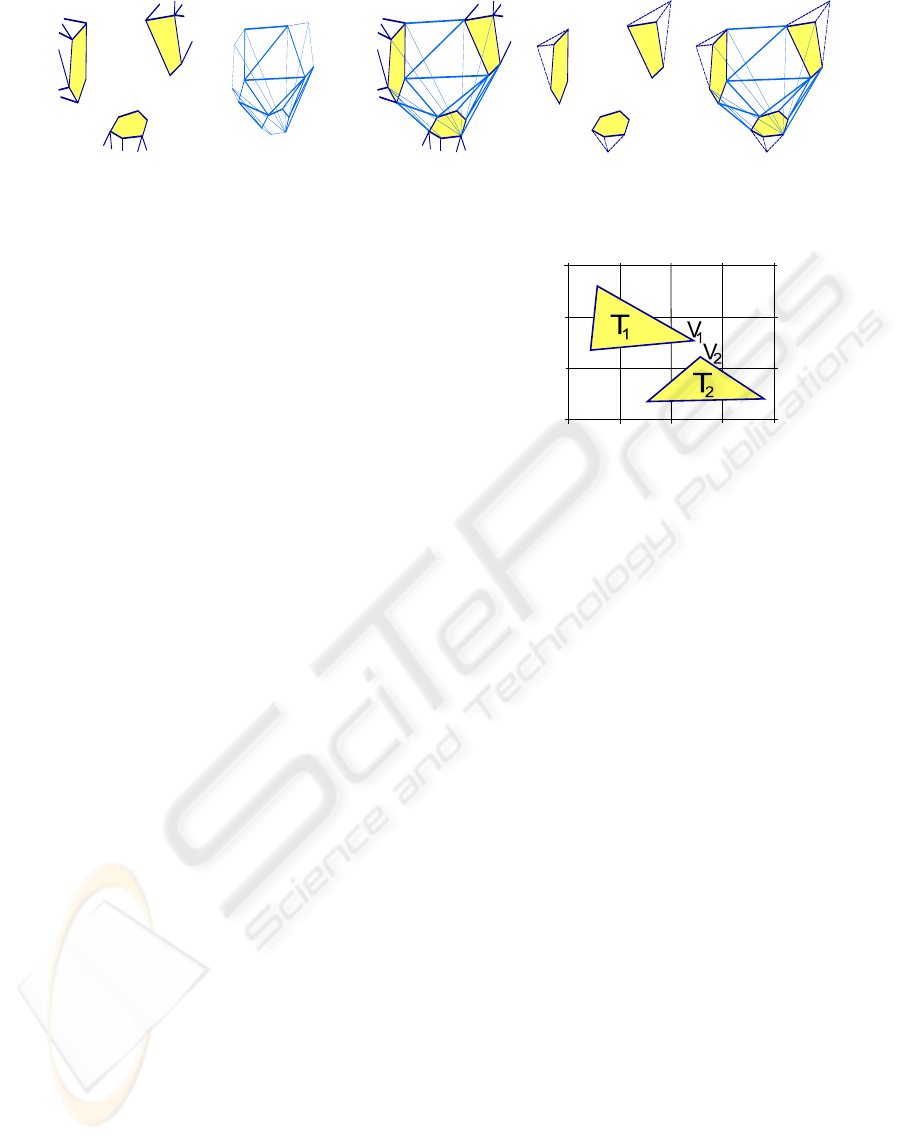
Figure 3: Triangles T
1
and T
2
are checked for intersection,
since vertices V
1
and V
2
are mapped to the same hash key.
3 THE (SELF-)COLLISION
DETECTION SYSTEM
In order to detect self-collisions of one mesh compo-
nent as well as collisions between two or more com-
ponents, we use a spatial hashing approach.
We are given a triangular mesh M = (V,E,F) in
a bounded region Ω ⊂ R
3
. As in (Teschner et al.,
2003), the collision detection algorithm subdivides Ω
into small axis aligned bounding boxes. In a single
pass, all vertices v = (v
x
,v
y
,v
z
) ∈ Ω are mapped to
hash indices by a function
hash : V → {0,.. .,m − 1},
v 7→
b
v
x
/l
c
p
1
+
b
v
x
/l
c
p
2
+
b
v
x
/l
c
p
3
mod m
(1)
Here, l is a parameter for the box size. The coordi-
nates are scaled by l and rounded down to the next
integer. In image segmentation, we usually set the
box size parameter to 1, such that a box is given by
one voxel. The p
i
are large prime numbers, and m in-
dicates the hash table size. In a second pass, for each
hash index i ∈ {0, ..., m −1}, the algorithm processes
the vertices with hash index i. First, the vertices are
gathered to connected components, where two ver-
tices are connected, if they are neighbors, i.e. there
is a mesh edge connecting them. Each two triangles
adjacent to vertices of different components are inter-
sected by a fast triangle-triangle intersection test, f.e.
(Moller, 1997). If an intersection between two tri-
angles is detected, we store the adjacent component
A ROBUST AND EFFICIENT METHOD FOR TOPOLOGY ADAPTATIONS IN DEFORMABLE MODELS
377

Figure 4: Star and link of a vertex. Here, the link is a simple,
closed polygon.
vertices as (self-)intersection data. For an illustra-
tion, see Figure 3. We have optimized the parame-
ters of the spatial hashing algorithm in order to obtain
maximum speed. As (Teschner et al., 2003) reports,
spatial hashing with tetrahedral meshes works best if
the hash table size is chosen approximately equal to
the number of mesh vertices. In numerical experi-
ments with our triangle-triangle intersection test, we
found out that the number of hash indices chosen to be
twice the number of vertices is appropriate for trian-
gle meshes. With this choice, only a very few number
of hash collisions occurs, and the complexity of pro-
cessing the vertices of one hash index can be regarded
as constant. Therefore, the expected time for detect-
ing (self-)collisions of the mesh is linear, the memory
usage is small (twice the number of vertices) and the
required data structures are simple. Note that in most
applications with a sufficiently smooth mesh, only a
very small number of colliding vertices occurs.
4 GENERATION OF THE
HANDLE DATABASE
Assume we are given k simple closed polygons con-
sisting of λ
1
,. ..,λ
k
vertices. The considerations in
this section are independent of the vertex coordinates.
As explained in Section 2 and Figure 2, the database
consists of handles (E,F) for the data (k;λ
1
,. ..,λ
k
),
which produce a combinatorially consistent mesh.
These handles can be computed by forming caps out
of the simple, closed polygons and looking for trian-
gulations of the caps to a single sphere (as in Figure
2(d)-(e)). Therefore, we first formulate a topological
characterization of 2-spheres in Subsection 4.1, which
allows for easy computation of the handle database
and examination of its structure in Subsection 4.2.
4.1 Topological Characterization of
2-spheres
We introduce some required topological notions here,
details can be found f.e. in (Dey et al., 1999) and
(Hatcher, 2002), Chapter 2. We are given a mesh
M = (V,E,F) embedded in R
3
.
A measure of connectivity of M are its homology
groups H
0
(M), H
1
(M) and H
2
(M), indicating the
number of connected components, tunnels and voids
of M. As an important example, if M is a triangulation
of the 2-sphere S
2
,
H
i
(M) =
Z i = 0, 2
0 i = 1.
(2)
For a vertex v ∈ V , Star and Link are defined by
St(v) = {τ ∈ M | exists τ
0
∈ M with v ⊆ τ
0
, τ ⊆ τ
0
},
(3)
Lk(v) := {τ ∈ St(v) | τ ∩ v =
/
0} (4)
Star and link are visualized in Figure 4.
With these notions, we can characterize a 2-sphere:
4.1 Criterion. Given a mesh M = (V,E,F). If
(1)
H
i
(M) =
Z i = 0, 2
0 i = 1
(5)
and
(2) for each v ∈ V , Lk(v) is a simple, closed polygon
then M triangulates a 2-sphere.
This criterion follows easily from the fact, that a
mesh triangulates a compact surface, if condition (2)
is fulfilled, and that a compact surface with homology
groups as in condition (1) is homeomorphic to a
2-sphere, (Massey, 1991), Chapter 1.
4.2 Computation and Structure of the
Handle Database
We now use the sphere classification criterion 4.1 for
construction of the handle database. Let us first com-
pute the number of faces f
h
of a handle (E,F). We
set µ
l
=
∑
l
i=1
λ
i
and number the vertices of the k poly-
gons by 1, . .., µ
1
; ...; µ
k−1
+ 1,.. .µ
k
. The (artificial)
cap vertices are numbered by −1,.. .,−k, see Figure
5(a). Let v,e, f denote the number of vertices, edges
and faces of the final sphere. From Euler’s formula
we deduce v − e + f = 2. In a triangulated sphere,
each edge is the boundary of two triangles, and each
face has three edges, which gives 2e = 3 f . Both for-
mulas together give f = 2v − 4, and from v=µ
k
+ k it
follows f = 2µ
k
+ 2k − 4. Since the caps contain µ
k
faces altogether, and the sphere is constructed out of
the caps, we obtain f
h
= µ
k
+ 2k − 4.
For computation of handles, f
h
faces are generated
and Criterion 4.1 is checked. We use (PARI, 2005)
for the homology part of the criterion. As an exam-
ple, in case λ
1
= 5, λ
2
= 4, λ
3
= 3, we obtain faces
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
378

(a) (b) (c)
Figure 5: In (a), cap vertices are numbered. Group actions are shown in the next two diagrams: A rotation is shown in (b), an
exchange is shown in (c).
(1,2,11) (1,5,12) (1,11,12) (2,3,8) (2,8,10) (2,10,11) (3,4,7)
(3,7,8) (4,5,6) (4,6,7) (5,6,9) (5,9,12) (8,9,10) (9,10,12)
and adjacent edges as handle. Altogether, we com-
puted 120 handles in this case. It is not necessary to
compute all handles by Criterion 4.1, since we can
also compute handles from existing ones by applica-
tion of symmetric group actions on the handles.
(1) Rotations: As the vertices of a polygon are cycli-
cally ordered, the vertex which gets the start num-
ber µ
i+1
is arbitrarily chosen. Therefore, these
numbers can be rotated arbitrarily, as shown in
Figure 5(b).
(2) Exchanges: Reflecting the fact, that on this com-
binatorial level two polygons with the same num-
ber of vertices λ
i
= λ
j
cannot be distinguished,
we note that two such neighborhoods can be ex-
changed. This is depicted in Figure 5(c).
As an example, rotating the handle of the previous
example by the operation shown in Figure 5(b), gives
another handle with faces
(5,1,11) (5,4,12) (5,11,12) (1,2,8) (1,8,10) (1,10,11) (2,3,7)
(2,7,8) (3,4,6) (3,6,7) (4,6,9) (4,9,12) (8,9,10) (9,10,12).
With this knowledge, the size of the database be-
comes very small, since only a few generating ele-
ments need to be stored, the others are obtained by
applying group actions.
5 THE TOPOLOGY ADAPTATION
SYSTEM
The main ingredients of the topological adaptation
system are self-collision detection and the handle
database, as described in Sections 3 and 4. Here we
give the missing routines necessary for a complete,
executable algorithm.
• Make components of colliding vertices: Assume
that the self-collision detection algorithm has de-
tected overlapping mesh regions, represented by
non-neighboring vertices lying in the same axis
aligned bounding box, which are adjacent to in-
tersecting triangles. These vertices v
i
are grouped
to connected components C
1
,. ..,C
k
, such that for
i 6= j, two arbitrary vertices v ∈ C
i
, w ∈ C
j
have
no common neighbor. This is done by initializ-
ing each set C
i
with the single element v
i
, and as
long as two sets C
i
, C
j
have common neighbors,
they are merged and these common neighbors are
inserted to the union additionally.
• Local refinement: As a next step, we plan to
remove all vertices of the sets C
i
(and adjacent
pieces) from the mesh. Since the holes we ob-
tain after removal are not always surrounded by
simple, closed curves as required for the follow-
ing steps, we perform a local refinement around
the sets C
i
first. This procedure is shown in Fig-
ure 6. All edges between cluster vertices C
i
and
vertices of V \C
i
are subdivided by an additional
vertex, and edges between the new vertices are in-
serted for triangulation, see Figure 6(b). After this
refinement procedure, the vertices of the mesh C
i
are removed from the mesh.
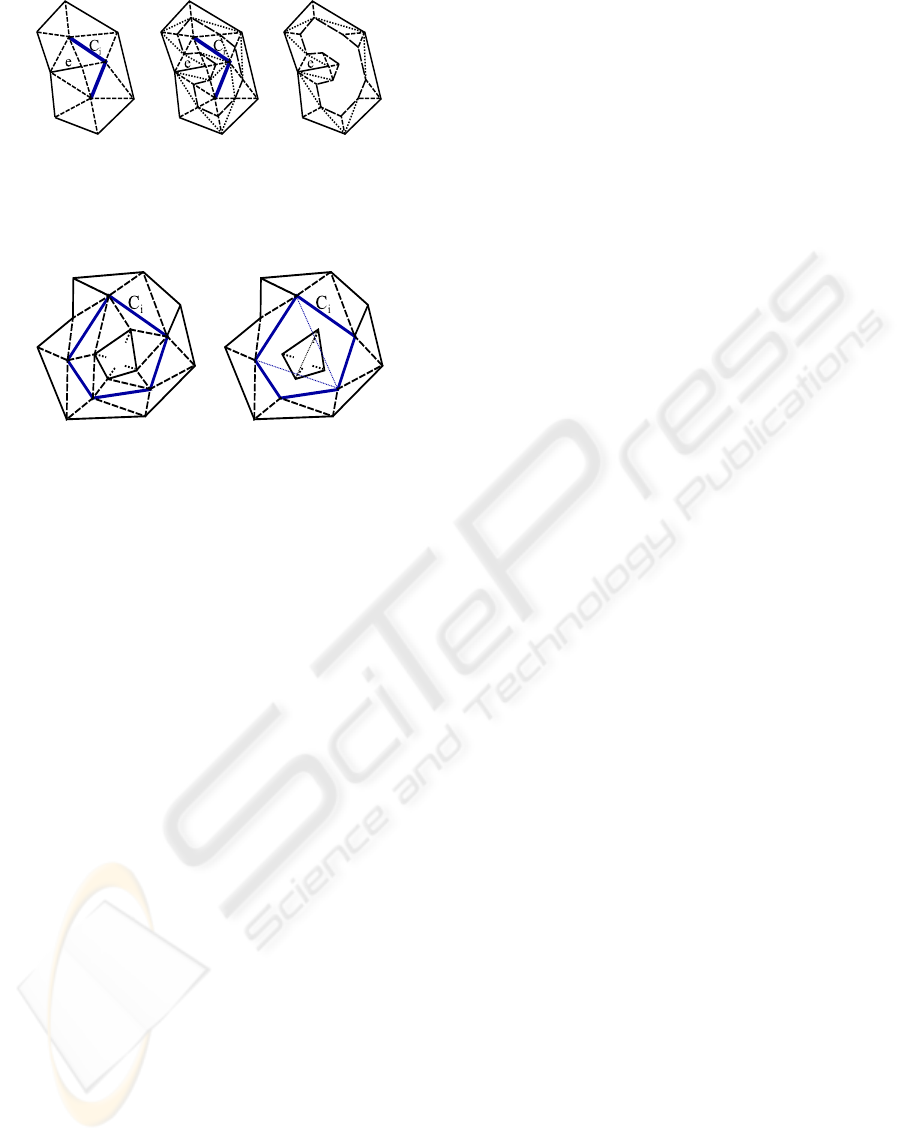
• Nested objects: After refinement, a component C
i
needs not be simply connected, i.e. C
i
encloses
non-colliding mesh parts as shown in Figure 7. In
this case, nested objects are detected. Nested ob-
jects are processed as follows: Edges connecting
C
i
and a nested object are removed, and both parts
are triangulated. This procedure works stable,
since both components are surrounded by simple,
closed polygons after local refinement.
Let us now summarize our topology adaptation
system:
Once and for all mesh evolutions: Compute
the handle database. This database can be used for
all evolutions and has to be computed only once.
We have computed handles for k = 2, 3, 4 and λ
i
≤ 15.
During a mesh evolution:
A ROBUST AND EFFICIENT METHOD FOR TOPOLOGY ADAPTATIONS IN DEFORMABLE MODELS
379
(a) (b) (c)
Figure 6: In (a), edge e ver that removing C
i
leads to a sim-
ple closed polygon around the hole. A local refinement is
performed in (b). After removal of C
i
, a simple closed poly-
gon around the hole arises in (c).
(a) (b)
Figure 7: In (a), C
i
is not simply connected. The inside
component is separated from C
i
as shown in (b), by remov-
ing the connecting edges. Both parts are triangulated after-
wards (small dotted lines).
(1) Detect self-intersections of the mesh and con-
struct connected vertex components C
1
,. ..,C
k
.
(2) Apply the local refinement algorithm around the
components.
(3) Handle possible nested objects.
(4) Remove the vertices of C
1
,. ..,C
k
and its adjacent
triangles and edges from the mesh.
(5) For the neighborhood data k and λ
1
,. ..,λ
k
, look
up handles for a possible topology change in the
database.
(6) Check each possible handle for self-intersections.
(7) Among the handles which do not produce self-
intersections, take one minimizing edge length,
or accept a set of triangles with least self-
intersections.
After a topology change, the mesh is usually rather
coarsely sampled at the location, where the mesh has
been adapted. Therefore, Taubin’s local smoothing
method (Taubin, 1985) is applied to these pieces.
6 RESULTS AND DISCUSSION
We tested our topology change algorithm with the
segmentation routine of (Chen and Medioni, 1995)
on artificial and medical images. The dark part is re-
garded as the object. In all examples, a small sphere is
manually placed inside the voxel image, and automat-
ically evolved towards the boundary of the object. As
far as possible, we compare the experimental results
to those given in (Lachaud and Taton, 2005).
• In an ultrasound dataset a cyst is segmented in
Figure 8. The white part inside the cyst, running
from front to back, stems from a biopsy needle. A
segmentation is performed to determine the shape
of the cyst and the position of the needle. Cyst
and needle are accurately segmented.
• Figure 9 shows a cube with spherical cavity. Dif-
fering from the example in (Lachaud and Taton,
2005), every side of the cube contains a hole, such
that the segmenting contour has genus 5.
• The left part of Figure 10 shows an object of genus
3, the starting ball chosen on one crossing of the
four parts. Therefore, a topology change with four
parts hitting at the same time is performed.
• The right part of Figure 10 shows a torus with 4
nested objects. Segmentation result is a torus en-
closing 4 spheres.
The performance of our topology adaptation system
tested on the four examples is given in table 1.
As expected, the running times of the segmenta-
tion algorithm roughly depend linearly on the num-
ber of iterations resp. vertices. The running time for
segmentation of the object of genus 3 is a bit shorter,
since many vertices reach the object boundary rather
early, and only a comparably small number of vertices
is actually updated during an evolution step. Alto-
gether, we obtain a speedup versus previous 3D topol-
ogy adaptive segmentation routines. The cube with
spherical cavity can be compared to the first example
in (Lachaud and Taton, 2005). There, only one face
of the cube is penetrated by the ball, such that their
object has genus 0. We obtain comparable segmenta-
tion quality in some seconds, in spite of more com-
plex topology, more faces and more iteration cycles.
7 CONCLUSIONS AND
OUTLOOK
Based on a database derived from homology theory,
we have introduced a very efficient novel topology
adaptation system which runs independently of the
evolution, does not require any reparametrizations
and runs stable, even if the mesh is not regularly sam-
pled. Based on spatial hashing, we have introduced
a novel and efficient (self)-collision detection algo-
rithm for triangular meshes, which runs in linear time
and does not require complex data structures or huge
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
380
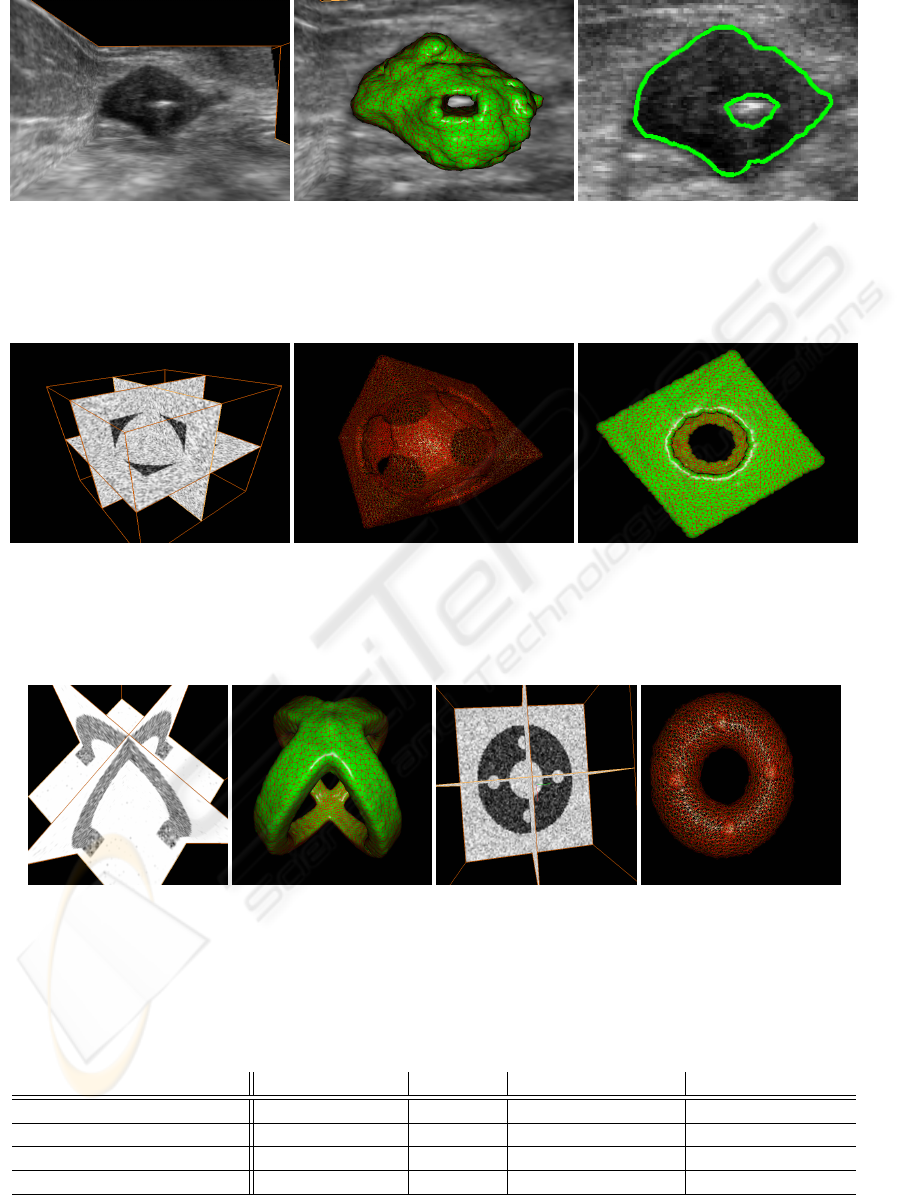
Figure 8: The original ultrasound image is given on the left hand side. The final segmenting mesh is shown in the middle. A
projection on the y-z plane is presented on the right hand side.
Figure 9: A cube with a spherical cavity and some Gaussian noise added. As a segmentation result, we obtain the mesh shown
on the middle and right. In the middle diagram, only the edges are visualized.
Figure 10: Voxel images for the last two examples, with Gaussian noise added, and the segmentation results.
Table 1: For each test example, the number of iterations and vertices and the running time of the segmentation algorithm is
given. Tests were performed on a 3.5 GHz computer with 2 GB RAM.
Object Voxel size Iterations Number of vertices Running time in s.
Cyst 199 × 99 × 171 133 8687 3
Cube with spherical cavity 100 × 100 × 100 709 13576 33
Object of genus 3 100 × 100 × 100 677 9680 14
Torus with nested objects 100 × 100 × 100 215 5454 6
A ROBUST AND EFFICIENT METHOD FOR TOPOLOGY ADAPTATIONS IN DEFORMABLE MODELS
381

memory resources. The presented examples show
that accurate 3D segmentation can be performed in
some seconds. As a future work, we want to com-
bine the presented topological adaptation algorithm
with a locally adaptive mesh evolution as presented
in (Lachaud and Taton, 2005) to reduce the number
of mesh vertices and obtain further speedup.
ACKNOWLEDGEMENTS
The author would like to thank O. Scherzer for fruitful
discussions and the anonymous reviewers for the cri-
tiques that helped to improve the paper. The work of
J.A. is supported by the Austrian Science Foundation
(FWF) project Y-123INF.
REFERENCES
Abhau, J., W.Hinterberger, and Scherzer, O. (2007). Seg-
menting surfaces of arbitrary topology: A two-step
approach. In Medical Imaging 2007: Ultrasonic
Imaging and Signal Processing. Proceedings of SPIE
– Volume 6513.
Bischoff, S. and Kobbelt, L. (2004). Snakes with topology
control. In The Visual Computer, Vol 20, pages 197–
206.
Caselles, V., Catte, F., Coll, B., and Dibos, F. (1993). A geo-
metric model for active contours in image processing.
Numerische Mathematik, 66:1–31.
Chen, Y. and Medioni, G. (1995). Description of complex
objects from multiple range images using an inflating
balloon model. Computer Vision and Image Under-
standing, 61, No 3:325–334.
Delingette, H. (1994). Adaptive and deformable models
based on simplex meshes. In IEEE Workshop of Non-
Rigid and Articulated Objects. IEEE Computer Soci-
ety Press.
Dey, T. K., Edelsbrunner, H., and Guha, S. (1999). Com-
putational topology. In Advances in Discrete and
Computational Geometry (Contemporary mathemat-
ics 223), pages 109–143. American Mathematical So-
ciety.
Hatcher, A. (2002). Algebraic Topology. Cambridge Uni-
versity Press.
Lachaud, J. O. and Montanvert, A. (1999). Deformable
meshes with automated topology changes for coarse-
to-fine three-dimensional surface extraction. Journal
of Medical Image Analysis, 3, No 2:187–207.
Lachaud, J. O. and Taton, B. (2003). Deformable model
with adaptive mesh and automated topology changes.
In Proceedings of 4th International Conference on 3-
D Digital Imaging and Modeling (3DIM’2003).
Lachaud, J. O. and Taton, B. (2004). Resolution indepen-
dent deformable model. In International Conference
on Pattern Recognition (ICPR’2004), pages 237–240.
Lachaud, J. O. and Taton, B. (2005). Deformable model
with a complexity independent from image resolu-
tion. Computer Vision and Image Understanding,
99(3):453–475.
Massey, W. S. (1991). A basic course in algebraic topology.
Springer.
McInerney, T. and Terzopoulos, D. (2000). T-snakes:
Topology adaptive snakes. Medical Image Analysis,
4(2):73–91.
Moller, T. (1997). A fast triangle-triangle intersection test.
Journal of Graphics Tools, 2/2:25–30.
Osher, S. and Sethian, J. A. (1988). Fronts propagating
with curvature dependent speed: Algorithms based on
hamilton-jacobi formulations. Journal of Computa-
tional Physics, 79:12–49.
PARI (2005). PARI/GP, version 2.1.7. The PARI Group,
Bordeaux. available from http://pari.math.
u-bordeaux.fr/.
Pons, J. P. and Boissonnat, J. D. (2007). Delaunay de-
formable models: Topology-adaptive meshes based
on the restricted delaunay triangulation.
Taubin, G. (1985). A signal processing approach to fair
surface design. In Computer Graphics (SIGGRAPH
95 Proceedings), pages 351–358.
Teschner, M., Heidelberger, B., Mueller, M., Pomeranets,
D., and Gross, M. (2003). Optimized spatial hash-
ing for collision detection of deformable objects. In
Proceedings of Vision, Modeling, Visualization, pages
47–54.
Teschner, M., Kimmerle, S., Heidelberger, B., Zachmann,
G., Raghupathi, L., Fuhrmann, A., Cani, M., Faure,
F., Magnenat-Thalmann, N., Strasser, W., and Volino,
P. (2005). Collision detection for deformable objects.
Computer Graphics Forum, 24:61–81.
Witkin, A., Kass, M., and Terzopoulos, D. (1987). Snakes:
Active contour models. International Journal of Com-
puter Vision, 1, No 4:321–331.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
382
