
AN AUTOMATED VISUAL EVENT DETECTION SYSTEM FOR
CABLED OBSERVATORY VIDEO
Danelle E. Cline, Duane R. Edgington
Monterey Bay Aquarium Research Institute, 7700 Sandholdt Road, Moss Landing, CA 95039, USA
Jérôme Mariette
Monterey Bay Aquarium Research Institute, 7700 Sandholdt Road, Moss Landing, CA 95039, USA
Keywords: Cabled Observatory Video, Automated Visual Event Detection, AVED, Underwater Video Processing.
Abstract: This paper presents an overview of a system for processing video streams from underwater cabled
observatory systems based on the Automated Visual Event Detection (AVED) software. This system
identifies potentially interesting visual events using a neuromorphic vision algorithm and tracks events
frame-by-frame. The events can later be previewed or edited in a graphical user interface for false
detections, and subsequently imported into a database, or used in an object classification system.
1 PROJECT OVERVIEW
Ocean observatories and underwater video surveys
have the potential to unlock important discoveries
with new and existing camera systems. Yet the
burden of video management and analysis often
requires reducing the amount of video recorded and
later analyzed. To help address this problem, the
Automated Visual Event Detection (AVED)
software has been under development for the past
several years. The system has shown promising
results when applied to video from video surveys
conducted with video cameras on Remotely
Operated Vehicles (Walther, 2003, 2004). Here we
report the system’s extension to cabled-to-shore
observatory cameras.
Among the first applications of AVED to cabled
observatories, include a deepwater video instrument
called the Eye-In-The-Sea (EITS) instrument
(Widder, 2005) to be deployed on the Monterey
Accelerated Research System (MARS) observatory
test bed in early 2008. Additionally, a modified
version of AVED is currently being developed
for a
proof-of-concept system to integrate with the
Victoria Experimental Network Under the Sea
(VENUS) observatory.
This paper first gives an overview of the AVED
system in general, followed by a discussion of the
AVED system for the EITS experiment, and lastly,
preliminary results and future work is discussed.
Figure 1: A 3-D perspective of the MARS cabled-to-shore
observatory site on Smooth Ridge, at the edge of
Monterey Canyon.
2 AVED OVERVIEW
The AVED software is a collection of custom
software written in C++ and Java designed to work
on Linux enabled computers. The collection of
software includes a graphical user interface used to
edit AVED results. To manage high compute
demand applications, an optimized version of AVED
for parallel execution runs on our 8-node Racksaver
196
E. Cline D., R. Edgington D. and Mariette J. (2008).
AN AUTOMATED VISUAL EVENT DETECTION SYSTEM FOR CABLED OBSERVATORY VIDEO.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 196-199
DOI: 10.5220/0001086801960199
Copyright
c
SciTePress
rs1100 dual XEON 2.4 GHz servers configured as a
Beowulf cluster.
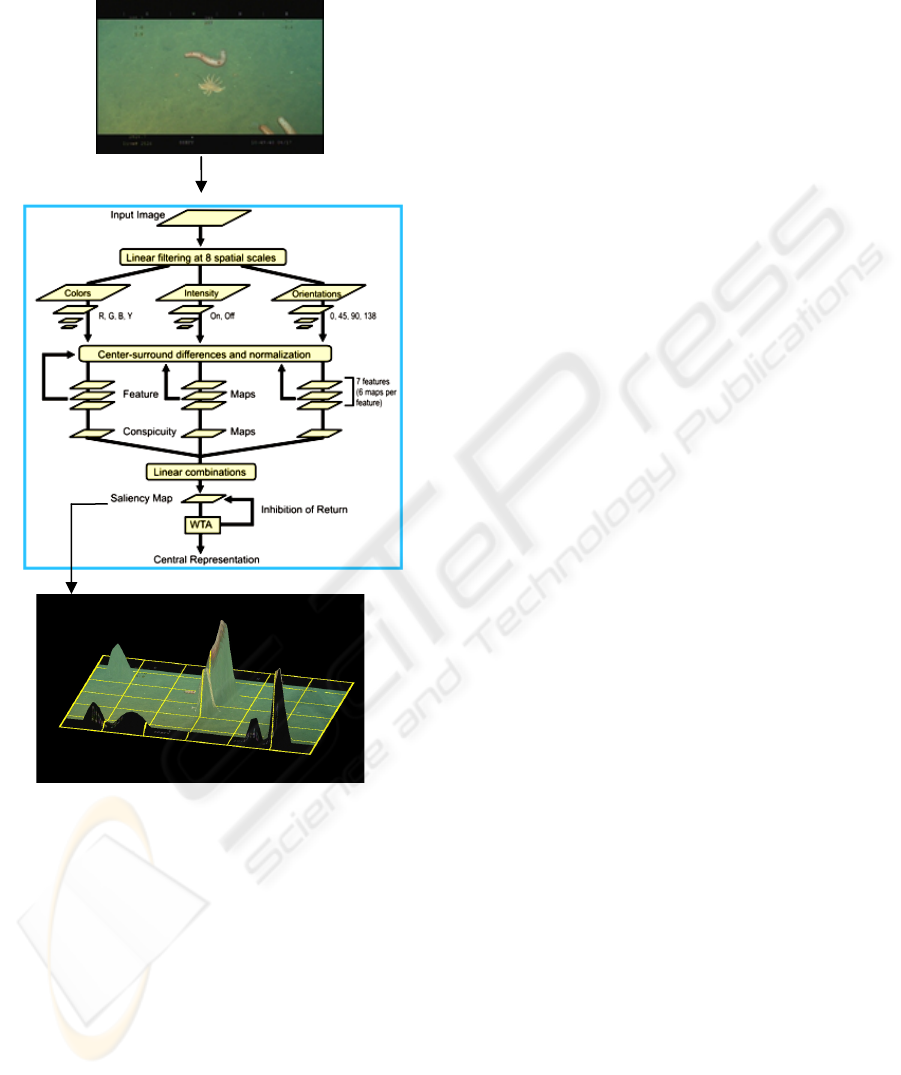
Figure 2: Saliency map from the iLab toolkit warped onto
a 3-D map. Peaks in the map show points of high visual
attention in the center of the image where the
Rathbunaster and Leukothele are.
2.1 Image Pre-processing
Underwater video often contains artifacts like lens
glare, visual obstructs such as instrumentation
equipment, or introduced artifacts such as time code
video overlays. Some simple algorithms are
employed to remove these artifacts. To remove the
lens glare and transient equipment, a simple
background subtraction scheme is used whereby the
average from a running image cache is subtracted
from the input image. To remove time code overlays
or stationary equipment in a scene, a simple mask is
applied that removes the areas before the detection
and tracking steps.
2.2 Detection and Tracking
2.2.1 Neuromorphic Event Detection
Central to the AVED software design is the
detection step, where candidate events are identified
using a neuromorphic vision algorithm developed by
the Itti and Koch (Itti, 1998). In the saliency model,
each input video frame is decomposed into seven
channels (intensity, contrast, red/green and
blue/yellow double color opponencies, and four
canonical, spatial orientations at six spatial scales,
yielding 42 feature maps. After iterative spatial
competition for saliency within each map, maps are
then combined to form a unique saliency map. This
saliency map is then scanned for the topmost salient
locations using a winner-take-all neural network.
Figure 2 illustrates and example saliency map
from the iLab toolkit warped onto a 3-D map for a
single underwater video frame. Peaks in the map
show points of high visual attention. Objects are
then segmented around these peak points and then
tracked frame-by-frame to form a visual event.
Events that can be tracked over several frames are
stored as “interesting”; otherwise they are
designated as “boring” and removed from tracking.
This AVED saliency-based detection algorithm
and many of the basic image processing algorithms
used in AVED are provided by the iLab
Neuromorphic Vision C++ from the University of
Southern California.
2.2.2 Fixed Camera Object Tracking
In the case of a fixed observatory camera with
minimum pan and tilt or zoom movement such as
the EITS camera, an average from a running image
cache is used with a graph cut-based (Howe, 2004)
algorithm to extract foreground objects from the
video. Only pixels determined to be background
versus detected foreground objects are included in
this image cache, thereby removing the objects
weight on the background computation. This
segmentation scheme results in better segmentation
of faint objects. To track visual events, a nearest
neighbor tracking algorithm is used.
AN AUTOMATED VISUAL EVENT DETECTION SYSTEM FOR CABLED OBSERVATORY VIDEO
197
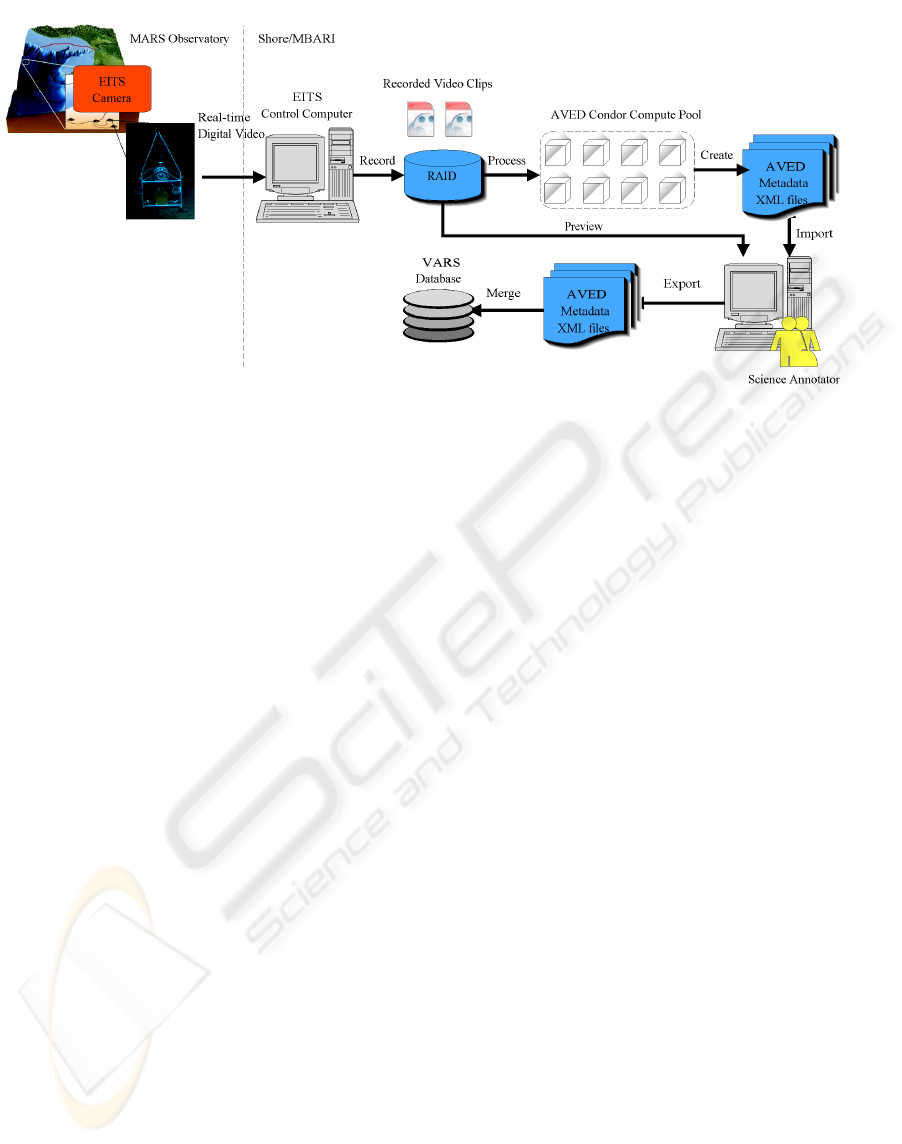
Figure 3: EITS-AVED Data Flow.
3 AVED DATA FLOW FOR EITS
Figure 3 shows the end-to-end data flow for the
EITS camera system on MARS. The MARS high
bandwidth network enables digital video to be
transmitted to shore. This digital video stream is
then captured on shore into individual clips. To
execute and manage this workflow, we use Condor,
a specialized workload management system for
compute and data intensive jobs developed by the
University of Wisconsin Madison. <http://
www.cs.wisc.edu/condor/>. Condor provides
scheduling queuing and resource management.
Video clips are then submitted for processing in a
pool of Condor-enabled compute resources,
including an 8-node, 16 CPU Beowulf cluster. The
AVED software finds interesting events, saves these
events to a metadata XML file. A science annotator
then edits events in the AVED user interface for
false detections or other non-interesting events. The
edited XML metadata are then imported into a
database for use with the Video Annotation and
Reference System (VARS) that forms a catalogue of
the clips as well as the annotations of interesting
events by AVED.
4 RESULTS
Figure 4 shows the comparison of EITS video
processed by AVED with professional annotation
for 172 previously recorded video clips of varying
lengths from 1 to 20 minutes. A high rate of
detection and a low rate of false detection and of
misses are evident. The automated system correctly
identified video containing interesting events
(Correct Positive) 81% as well as video not
containing events (Correct Negative) 6% with few
false alarms (False Positive) 12% and very few
misses of video clips with one or more interesting
events (False Negative) 1%.
5 CONCLUSIONS
A system for detecting and visual events in an
observatory using the AVED software is in
development and planned for deployment on the
MARS observatory in 2008. This automated system
for detecting visual events includes customized
tracking and detection algorithms tuned for
underwater still cameras. Analysis of video clips
from previous deployments of the Eye-in-the-Sea
camera system processed by AVED demonstrate its
potential to correctly identify events of interest, as
well as clips of low interest that can be skipped .
6 FUTURE WORK
Preliminary work has been done on a computer
classification program used in conjunction with
AVED to classify benthic species (Edgington,
2006). Future work includes further improvements
to this classification software and full integration
with the AVED software.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
198
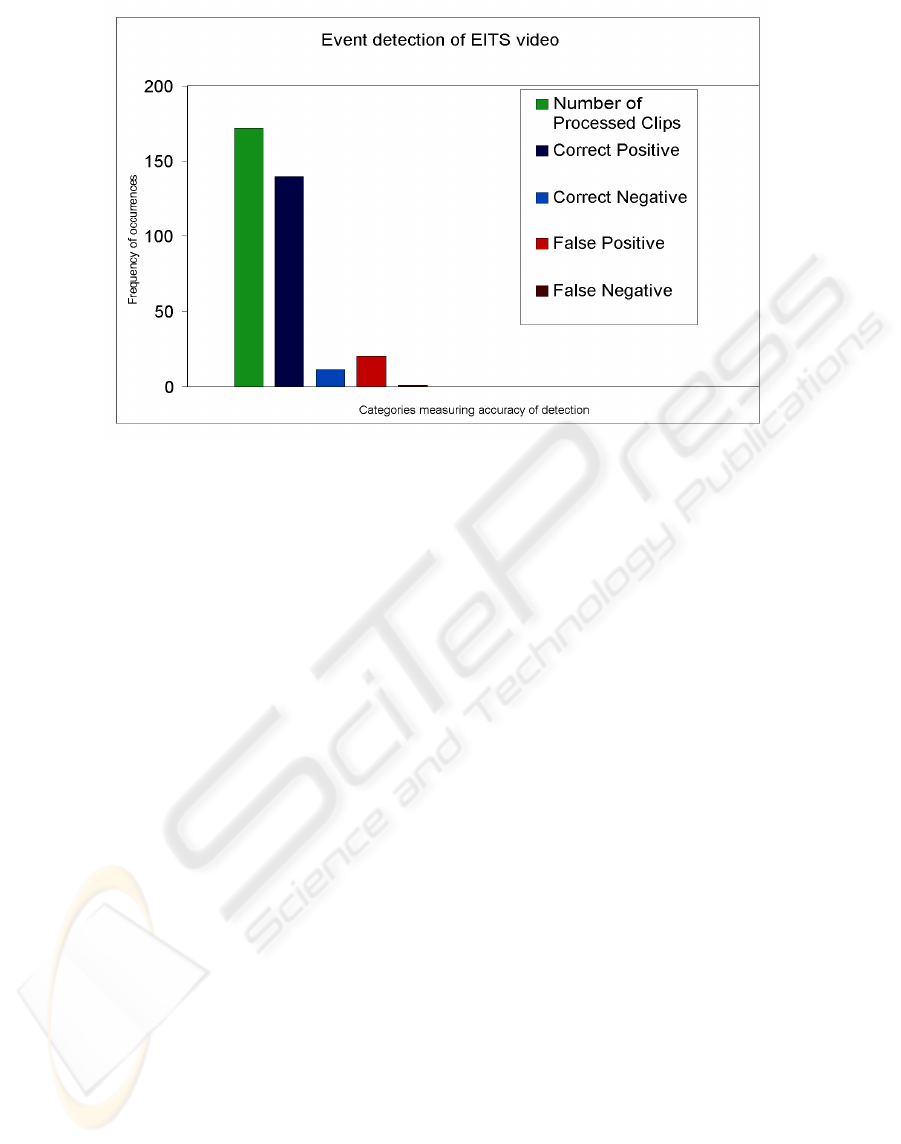
Figure 4: The EITS AVED detection results compared with professional annotators.
ACKNOWLEDGEMENTS
We thank the David and Lucile Packard Foundation
for their continued generous support. This project
originated at the 2002 Workshop for Neuromorphic
Engineering in Telluride, Colorado, USA in
collaboration with Dirk Walther, California Institute
of Technology, Pasadena, California, USA. We
thank Karen Salamy for her technical assistance and
the MBARI video lab staff for their interest and
input on the AVED user interface. We thank Edith
Widder, Erika Raymond, and Lee Frey for their
support and interest in using AVED for the EITS
instrument.
REFERENCES
Condor High Throughput Computing, The University of
Wisconsin, Madison, viewed 10 August, 2007,
<http://www.cs.wisc.edu/condor/ >.
Edgington, D.R., Cline, D.E., Davis, D., Kerkez, I., and
Mariette, J. 2006, ‘Detecting, Tracking and
Classifying Animals in Underwater Video’, in
MTS/IEEE Oceans 2006 Conference Proceedings,
Boston, MA, September, IEEE Press.
Howe, N. & A. Deschamps, 2004, ‘Better Foreground
Segmentation Through Graph Cuts’, technical report,
viewed 18 September, 2007,
<http://arxiv.org/abs/cs.CV/0401017>.
iLab Neuromorphic Vision C++ Toolkit at the University
of Southern California, viewed 18 September, 2007,
<http://ilab.usc.edu/toolkit/>.
Itti, L., C. Koch, and E. Niebur, 1998. ‘A model of
saliency-based event visual attention for rapid scene
analyses. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 20(22): p 1254-1259.
Otsu, N. 1979, ‘A Threshold Selection Method from
Gray-Level Histograms’, IEEE Transactions on
Systems, Man, and Cybernetics, Vol. 9, No. 1, pp. 62-
66.
Video Annotation and Reference System (VARS), viewed
12 November, 2007, <http://www.mbari.org/vars/>.
Walther, D., D.R. Edgington, K A. Salamy, M. Risi, R.E.
Sherlock, and Christof Koch, 2003, ‘Automated Video
Analysis for Oceanographic Research’, IEEE
International Conference on Computer Vision and
Pattern Recognition (CVPR), demonstration, Madison,
WI.
Walther, D, D.R. Edgington, C. Koch, Detection and
Tracking of Objects in Underwater Video, 2004, IEEE
International Conference on Computer Vision and
Pattern Recognition (CVPR), Washington, D.C.
Widder, E.A., B.H.Robison, K.R.Reisenbichler,
S.H.D.Haddock, 2005, ‘Using red light for in situ
observations of deep-sea fishes’, Deep-Sea Research, I
52:2077-2085.
AN AUTOMATED VISUAL EVENT DETECTION SYSTEM FOR CABLED OBSERVATORY VIDEO
199
