
SINGLE-IMAGE 3D RECONSTRUCTION OF BALL VELOCITY
AND SPIN FROM MOTION BLUR
An Experiment in Motion-from-Blur
Giacomo Boracchi, Vincenzo Caglioti and Alessandro Giusti
Dipartimento di Elettronica e Informazione,
Politecnico di Milano, Via Ponzio, 34/5 20133 Milano, Italy
Keywords:
Motion Blur, 3D Motion Reconstruction, Single Image Analysis, Blur Analysis.
Abstract:
We present an algorithm for analyzing a single calibrated image of a ball and for reconstructing its instanta-
neous motion (3D velocity and spin) by exploiting motion blur. We use several state-of-the-art image process-
ing techniques for extracting information from the space-variant blurred image, then robustly integrate such
information in a geometrical model of the 3D motion. We initially handle the simpler case in which the ball
apparent translation is neglegible w.r.t. its spin, then extend the technique to handle the most general motion.
We show extensive experimental results both on synthetic and camera images.
In a broader scenario, we exploit this specific problem for discussing motivations, advantages and limits of
reconstructing motion from motion blur.
1 INTRODUCTION
In this paper we propose a technique for estimating
the motion of a ball from a single motion blurred
image. We consider the instantaneous ball motion,
which can be described as the composition of 3D
velocity and spin: the proposed technique estimates
both these components by analyzing motion blur.
A more traditional and intuitive method consists
in recovering motion by analyzing successive video
frames: the expected shortcomings of such modus
operandi in realistic operating conditions motivate
our unusual approach. In fact, depending on equip-
ment quality, lighting conditions and ball speed, a
moving ball often results in a blurred image. Fea-
ture matching in successive video frames becomes
very challenging because of motion blur and also be-
cause of repetitive features on the ball surface: this
prevents inter-frame ball spin recovery. Then, it is
worth considering intra-frame information carried by
the motion blur. Our single-image approach has the
further advantage of enabling the use of cheap, high-
resolution consumer digital cameras, which currently
provide a much higher resolution than much more ex-
pensive video cameras. High resolution images are
vital for performing accurate measurements as the
ball usually covers a small part of the image.
We use an alpha matting algorithm (see Sec-
tion 3.1), as a preliminary step before applying a
known technique for estimating the 3D position and
velocity of an uniformly colored ball from a single
blurred image (Boracchi et al., 2007). This allows
us to relax the uniform color assumption and con-
sider textured balls on known background. Once the
ball position and velocity are known, we analyze the
blurred image of the ball textured surface: in particu-
lar, blur is characterized by smears which have vary-
ing direction and extent, resulting from the 3D motion
of the ball surface. We estimate spin by analyzing
such smears within small image patches, and by inte-
grating them on a geometrical 3D model of the ball.
The blur model derived from the 3D ball motion is
presented in Section 2, while in Section 3 we briefly
recall the image analysis algorithms used. The pro-
posed technique is described in Section 4. Section 5
presents experimental results and Section 6 summa-
rizes the work and presents future research directions.
1.1 Related Works
Given a single blurred image, the most treated prob-
lem in literature is the estimation of the point spread
function (PSF) that corrupted the image (Fergus et al.,
2006; Levin, 2007; Jia, 2007), usually with the pur-
pose of image restoration (deblurring).
Our work, on the contrary, takes advantage of mo-
tion blur for performing measurements on the im-
aged scene. Several other works follow a similar ap-
proach, such as (Klein and Drummond, 2005), which
describes a visual gyroscope based on rotational blur
22
Boracchi G., Caglioti V. and Giusti A. (2008).
SINGLE-IMAGE 3D RECONSTRUCTION OF BALL VELOCITY AND SPIN FROM MOTION BLUR - An Experiment in Motion-from-Blur.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 22-29
DOI: 10.5220/0001088000220029
Copyright
c
SciTePress

Figure 1: Some blurred ball images. Leftmost images are textureless, so their spin can not be recovered. Central images show
textured balls whose spin component dominates the apparent translation. Rightmost images are the most complete case we
handle, showing a significant amount of apparent translation and spin; note that the ball contours also appear blurred in this
situation, whereas they are sharp in the spin-only case.
analysis, or (Levin et al., 2007), which estimates the
scene depth map from an image acquired with a coded
aperture camera. Also, (Rekleitis, 1996) proposes to
estimate the optical flow from a single blurred im-
age. A ball speed measurement method based on a
blurred image has been proposed in (Lin and Chang,
2005). This assumes a simplified geometrical model
that originates space-invariant blur and prevents the
estimation of 3D motions and spin.
On the other hand, the problem of estimating the
motion of a ball in the 3D space has been extensively
treated in video tracking literature (Gopal Pingali and
Jean, 2000; J Ren and Xu, 2004; Jonathan Rubin
and Stevens, 2005). These methods assume the ball
visible from multiple synchronized cameras, in order
to triangulate the ball position in the corresponding
frames. In (Reid and North, 1998) a method is pro-
posed for reconstructing the ball 3D position and mo-
tion from a video sequence by analyzing its shadow.
In (Kim et al., 1998; Ohno et al., 2000), a physics-
based approach is adopted, to estimate the parameters
of a parabolic trajectory.
Recently, some methods for estimating the 3D
ball trajectory from image blur have been pro-
posed (Caglioti and Giusti, 2006; Boracchi et al.,
2007). However, these methods assume an uniformly-
colored ball, and do not recover spin.
2 PROBLEM FORMULATION
Let S be a freely moving ball centered in C, whose
radius R is known
1
, imaged by a calibrated camera.
We assume that during the exposure time T the ball
1
if the radius is not known, the whole reconstruction can
be performed up to a scale factor
motion is defined by the composition of two factors:
• a linear translation with uniform velocity, u. The
translation distance during the exposure is there-
fore T · u.
• the spin around a rotation axis a passing through
C, with angular speed ω. The rotation angle which
occurs during the exposure is therefore T ·ω.
From the ball localization technique (Boracchi
et al., 2007) we inherit the constraint that the ball
projections at the beginning and at the end of the ex-
posure significantly overlap. Moreover, in order to
recover the rotation axis and speed, we also require
that spin is not too fast nor too slow w.r.t. the ex-
posure time: π/50 < ω · T < π/2. In practice, these
constraints allow us to use an exposure time 5 ÷ 10
times longer than the exposure time which would give
a sharp image.
Our goal is to estimate the ball spin (both a and ω),
velocity u, and initial position by analyzing a single
blurred image.
We assume that the blur on pixels depicting the
ball is only due to ball motion. In practice, this can be
achieved if the ball is in focus and the camera is still.
Therefore the image formation model, on which our
analysis is based, can be described as follows.
2.1 Blurred Image Formation
Let Z be the blurred image that depicts the mov-
ing ball and let [0,T ] be the exposure interval. The
blurred image Z can be modeled as the integration of
infinitely many (sharp) sub-images I
t
,t ∈ [0, T ], each
depicting the ball in a different 3D position and spin
angle (see Figure 2):
Z(x) =
Z
T
0
I
t
(x)dt + η(x), x ∈ X. (1)
SINGLE-IMAGE 3D RECONSTRUCTION OF BALL VELOCITY AND SPIN FROM MOTION BLUR - An Experiment
in Motion-from-Blur
23

Figure 2: Blurred image formation model. The blurred im-
age Z is obtained as the temporal integration of many still
images I
t
. The alpha map α of the blurred ball represents
the motion of the object’s contours and is used for recover-
ing the translational motion component.
Where x represents the 2D image coordinates, I
t
(x) is
the light intensity that reaches the pixel x at time t,
and η ∼ N(0,σ
2
) is white gaussian noise.
The ball apparent contours γ
t
,t ∈ [0,T ] vary de-
pending on translation only. Note that each apparent
contour γ
t
is an ellipse and that, in each sub-image
I
t
, γ
t
may have a different position and also a dif-
ferent shape because of perspective effects (Boracchi
et al., 2007). On the contrary, the spin does not affect
γ
t
,t ∈ [0,T ]. In our reconstruction procedure, we will
exploit the fact that the alpha map α of the blurred ball
only depends on variations in γ
t
, and is not affected
by spin. The ball spin, combined with the translation,
changes the depicted ball surface in each sub-image I
t
and obviously the appearance of the ball in Z.
2.2 Blur on the Ball Surface
We treat the blur on the ball surface as locally space
invariant (Bertero and Boccacci, 1998). In particular
we approximate the blur in a small image region as
the convolution of the sub-image I
0
with a PSF having
vectorial support and constant value on it. Hence for
any pixel x
i
belonging to the ball image, we consider
a neighborhood U
i
of x
i
and a PSF h
i
such that
Z(x) =
Z
X
h
i
(x − s)I
0
(s)ds + η(x) , ∀x ∈ U
i
(2)
The PSF h
i
is identified by two parameters, the direc-
tion θ
i
and the extent l
i
.
3 IMAGE ANALYSIS
The proposed algorithm exploits two blur analysis
techniques in order to separately handle the effects of
ball translation and ball spin. The ball position and
velocity u in 3D space are obtained by combining an
alpha matting technique with the method presented in
(Boracchi et al., 2007). The ball spin is computed by
estimating the blur parameters within small regions
on the ball image.
3.1 Alpha Matting
Alpha matting techniques have been recently applied
to motion blurred images with different purposes, in-
cluding PSF estimation (Jia, 2007) and blurred smear
interpretation (Caglioti and Giusti, 2007). As shown
in (Giusti and Caglioti, ), by applying alpha matting
to the motion-blurred image of an object we obtain a
meaningful separation between the motion of the ob-
ject’s boundaries (alpha map) and the actual blurred
image of the object (color map).
As we described in the previous section, in this
scenario the alpha map of a blurred ball is not in-
fluenced by the spin but only by the translation: in
practice, the alpha map is the image we would ob-
tain if the background was black and the ball had a
uniformly-white projection. Therefore the alpha map
of the blurred ball can be used to estimate the ball po-
sition and displacement vector T · u according to the
technique presented in (Boracchi et al., 2007), even
when the ball surface is textured.
On the contrary, the color map only shows the
blurred ball image, as if it was captured over a black
background. In the following sections, the color map
will be analyzed in order to recover the ball spin.
In the general case, the matting problem is under-
constrained, even if the background is known. Still, in
literature many algorithms have been proposed: some
of them (Smith and Blinn, 1996; Mishima, 1993)
require a specific background (blue screen matting),
whereas others, with minimal user assistance, handle
unknown backgrounds (natural image matting) and
large zones of mixed pixels (0 < α < 1). Although
none is explicitly designed for the interpretation of
motion blurred images, we can get satisfactory results
in our peculiar setting. In this context, however, we
adopted (Giusti and Caglioti, ), a fast and exact alpha
matting algorithm, very suited to sport environments
where its requirements on the background and fore-
ground colors are often met.
3.2 Blur Analysis
As mentioned in Section 2.2, we approximate the blur
as locally shift invariant, produced by a convolution
with a PSF having vector-like support. We estimate
the blur direction and extent separately on N image
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
24

Figure 3: A synthetic image of a spinning golf ball. U
i
neighborhoods and recovered blur directions and extents are
shown. Each segment b
i
e
i
represents the blur parameters θ
i
,
l
i
within the region.
regions U
i
i = 1,..,N containing pixels which have
been covered by the ball projection during the entire
exposure time, i.e. α(x) = 1 ∀x ∈ U
i
, i = 1, ..,N.
In particular we apply the method proposed in
(Yitzhaky and Kopeika, 1996) and we estimate the
blur direction as the direction having minimum
derivative energy. This is motivated by the fact that
most of image details along the blur direction are
smoothed by blur. After estimating the blur direc-
tion, the blur extent is obtained from the distance be-
tween two negative peaks in the autocorrelation of di-
rectional derivatives along the blur direction. Figure 3
shows some square regions used for blur analysis.
Other techniques for estimating the local blur di-
rections may be used: for example, when the ball tex-
ture contains corners (like in most football balls), the
method presented in (Boracchi and Caglioti, 2007)
can be applied. Alternatively, blurred smears of
strong features can be highlighted by applying the fil-
tering techniques in (Caglioti and Giusti, 2007).
4 RECONSTRUCTION
TECHNIQUE
For clarity purposes we illustrate the proposed tech-
nique first in the simpler case, where blur is due to
ball spin only. Then, in Section 4.2.1 we cope with
the most general case where the ball simultaneously
translates and spins.
4.1 Null Translation
Let assume that during the exposure the ball does not
translate, i.e. u = 0, so that in the blurred image the
ball apparent contour is sharp. The ball apparent con-
tour γ is an ellipse and it allows us to localize the ball
in the 3D space by means of the camera calibration
parameters and knowledge of the ball radius. Points
belonging to γ are easily found in the image either by
ordinary background subtraction or using edge points
in the alpha matte. We extract γ by fitting an ellipse to
such points, enforcing the projective constraint of be-
ing the image of a sphere captured from the calibrated
camera.
Then, the blur is analyzed within N regions
U
i
, i = 1,.., N contained inside γ. In order to avoid
uniform-color areas, we select such regions around
local maxima x
i
,i = 1,..,N of the Harris corner mea-
sure (Harris and Stephens, 1988). For each of these
points, a local blur direction θ
i
is obtained using
method presented in (Yitzhaky and Kopeika, 1996).
Such directions are now exploited in order to re-
cover the 3D motions v
i
of the ball surface at points
corresponding to each of the regions. Since the cam-
era is calibrated and we know the 3D position of the
sphere S, we can backproject each pixel x
i
on the
sphere surface. Let X
i
be the intersection point, clos-
est to the camera, between the viewing ray of x
i
and
sphere S: the 3D motion direction of the ball surface
at X
i
is described by an unit vector v
i
(see Figure 4
left). More precisely, let π
i
be the plane tangent to S
at X
i
: then, v
i
is found as the direction of the intersec-
tion between π
i
and the viewing plane of the image
line passing through x
i
and having direction θ
i
.
As shown in Figure 4 (left), all the vectors
v
i
i = 1,..,N must lie on the same plane, orthogo-
nal to the rotation axis a. Then, let W = [v
1
|v
2
|..|v
N
],
be the matrix having vectors v
i
as columns. The direc-
tion of a is found as the direction of the eigenvector
associated to the smallest of W ’s eigenvalues. This
estimate is refined by iterating the procedure after re-
moving the v
i
vectors that deviate too much from the
plane orthogonal to a (outliers).
Note that, when the ball is not translating, the ball
apparent contour γ is sharp and in this case it is eas-
ily localized by fitting an ellipse to image edge points
(possily after background subtraction) or by using a
generalized Hough transform, without need of alpha
matting.
Although the rotation axis can be recovered ex-
ploiting θ
i
directions only, in order to estimate the an-
gular speed we need to consider also the blur length
l
i
estimated within regions U
i
. Each of these extents
represents the length of the trajectory (assumed rec-
tilinear) that the feature traveled in the image during
the exposure. For each feature, a starting point b
i
and
ending point e
i
are determined in the image as
b
i
= x
i
−
l
2
·
cosθ
sinθ
e
i
= x
i
+
l
2
·
cosθ
sinθ
(3)
and backprojected on the sphere surface S to points
B
i
and E
i
, respectively. We then compute the dihe-
SINGLE-IMAGE 3D RECONSTRUCTION OF BALL VELOCITY AND SPIN FROM MOTION BLUR - An Experiment
in Motion-from-Blur
25

Figure 4: Left: reconstruction geometry for zero translation. Right: reconstruction for full motion case.
dral angle β
i
between two planes, one containing a
and B
i
, the other containing a and E
i
. Such angles
are computed only for those estimates not previously
discarded as outliers. The spin angle is estimated as
the median of the β
i
angles. If the exposure time T
is known, the spin angular speed ω immediately fol-
lows.
4.2 Combining Ball Spin and Ball
Translation
If the ball contour changes during the exposure, the
procedure is modified as follows (see Figure 4 right).
At first, the image is decomposed in an alpha map
and a color map, as described in Section 3.1. The
alpha map is used to recover the ball apparent con-
tours at the beginning (γ
b
) and end (γ
e
) of the expo-
sure. These are determined using the method pre-
sented in (Boracchi et al., 2007), which returns two
spheres S
b
and S
e
having centers C
b
and C
e
respec-
tively. This reconstructs the ball position and transla-
tion during the exposure and, when the exposure time
T is known, also the ball velocity. Blur is then ana-
lyzed within regions U
i
, i = 1,..,N of the color map
whose pixels x satisfy the condition α(x) = 1, i.e. pix-
els which have been covered by the ball during the
whole exposure. For each U
i
, image points b
i
and e
i
are returned, as described in Section 4.1.
In this case, backprojecting the blur direction on
the sphere is meaningless, since blur is caused by si-
multaneous translation and spin. Therefore, the view-
ing ray of b
i
is intersected with S
b
, which identifies a
3D point B
i
and similarly, e
i
is backprojected on S
e
to
find E
i
(see Figure 4 (right)).
For each region, the 3D vector
v
i
= (E
i
− B
i
) − (C
e
−C
b
) (4)
represents the 3D motion of the ball surface at the
corresponding point, due to the spin component only.
The spin axis a and angular velocity ω are now esti-
mated as in the previous case.
4.2.1 The Orientation Problem
Each motion recovered from blur analysis has an ori-
entation ambiguity. This holds for the ball motion,
and also for the blur directions estimates θ
i
. The
ambiguity is explained by Equation (1) where the
blurred image is given by an integration of several
sub-images: obviously, information about the order
of sub-images is lost.
In the ball localization step we arbitrarily choose
which of the two found ellipses is γ
b
, representing the
ball at the beginning of the exposure, and which is
γ
e
. But when each blurred feature x
i
is considered
and its endpoints b
i
, e
i
identified, there is no way to
determine which corresponds to the feature location
at the beginning of the exposure. Now the choice is
not arbitrary since each must be backprojected to the
correct sphere (S
b
and S
e
, respectively).
We propose the following possible criteria for
solving the problem:
• if translation dominates spin, blurred features
should be oriented in the direction of the trans-
lational motion;
• blur orientations in nearby regions should be sim-
ilar;
• for features having one endpoint outside the inter-
section area between γ
b
and γ
e
only one orienta-
tion is consistent.
Another solution is computing the two possible vec-
tors v
0
i
and v
00
i
for each feature, then using a RANSAC-
like technique to discard the wrong ones as outliers.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
26

Figure 5: Reconstruction results on two synthetic images
(spin only).
Table 1: Mean relative error in ω estimation, expressed as a
percentage w.r.t the true value of ω. Columns where σ > 0
shows the average over ten noise realizations. Image data is
in the 0 ÷ 255 range.
ω · T \ σ 0 1 2 3
5.00 4.31 4.6222 5.0641 3.9401
6.25 2.26 2.5562 4.7898 4.3915
7.50 2.40 3.1353 2.7236 2.0544
8.75 0.75 1.5163 2.9408 5.0431
10.00 2.15 3.3975 5.3916 11.3800
5 EXPERIMENTS
We validated our technique on both synthetic and
camera images.
Each synthetic image has been generated accord-
ing to (1), by using the Blender 3D modeler for ren-
dering hundreds of sharp frames each depicting the
moving ball at a different t belonging to the expo-
sure interval [0,T ]. Each frame corresponds to a sub-
image I
t
, and all these sub-images are averaged to-
gether. We generated images with varying, known
spin amount ω · T in the 1
◦
÷ 20
◦
range, both in the
spin-only and in the spin plus translation cases. Sev-
eral scenarios (some are shown in Figures 5 and 7)
have been rendered with different spin axes w.r.t to the
camera. Some of our test cases use a plain texture for
the ball, whereas others feature a realistic ball surface
with 3D details such as bumps and seams, and spec-
ular shading; this simulates difficult operating condi-
tions, in which the ball appearance under motion is
not easily defined.
Table 1 shows algorithm performance for ω es-
timation in an 800x600 image also accounting for
noise. Figure 7 shows some of the synthetic images
we used. The algorithm accuracy is reduced when the
ball spin is too low as the small ball resolution does
not allow reliable estimates in small regions U
i
. Con-
sidered regions are disk shaped, having radius varying
between 30-45 pixels according to the noise standard
deviation σ, estimated using (Donoho and Johnstone,
Figure 6: A real image (tennis ball) spinning and translat-
ing, and reconstructed motion (right). Note complex motion
of points on the ball surface due to simultanous spin and
translation: red stripes show reconstructed motion, and cor-
rectly interpret the observed blur. Since the ball was rolling
on a table (bottom of the image), features on the bottom of
the ball are correctly estimated as still, and the rotation axis
as coplanar with the table.
1994).
Both in synthetic and camera images, the blur es-
timates show a variable percentage of outliers (5% ÷
50%), which are correctly discarded in most cases.
Outliers are more frequent in noisy images, with
smaller spin amounts and where the ball texture
shows strong, straight edges.
We found that, in general, the estimation of blur
extents l
i
is much more error-prone than the estima-
tion of blur angles θ
i
, without significant differences
between real and synthetic images. Together with the
orientation problem (see Section 4.2.1), this makes
the analysis of the general motion case much more
challenging than the spin-only case (where the extents
are only used to estimate ω · T ).
6 DISCUSSION, CONCLUSIONS
AND ONGOING WORKS
We propose a technique for reconstructing the veloc-
ity and spin of a moving ball from a single motion-
blurred image, highlighting advantages and disadvan-
tages of the approach. Our tests show very promising
results, both in synthetic and real images, especially
if the ball’s apparent translation during the exposure
is negligible (i.e. the ball contours are sharp). This
scenario, which is not unusual in practice, has several
important practical advantages such as no need of al-
pha matting, limited reliance on the estimation of blur
lengths – which we have found to be quite unreliable
– and irrelevance of the orientation problem.
In a broader view, our technique solves a nontriv-
ial motion estimation problem from the motion blur
in a single image. Although unusual, this approach
may result successful in situations where traditional
SINGLE-IMAGE 3D RECONSTRUCTION OF BALL VELOCITY AND SPIN FROM MOTION BLUR - An Experiment
in Motion-from-Blur
27
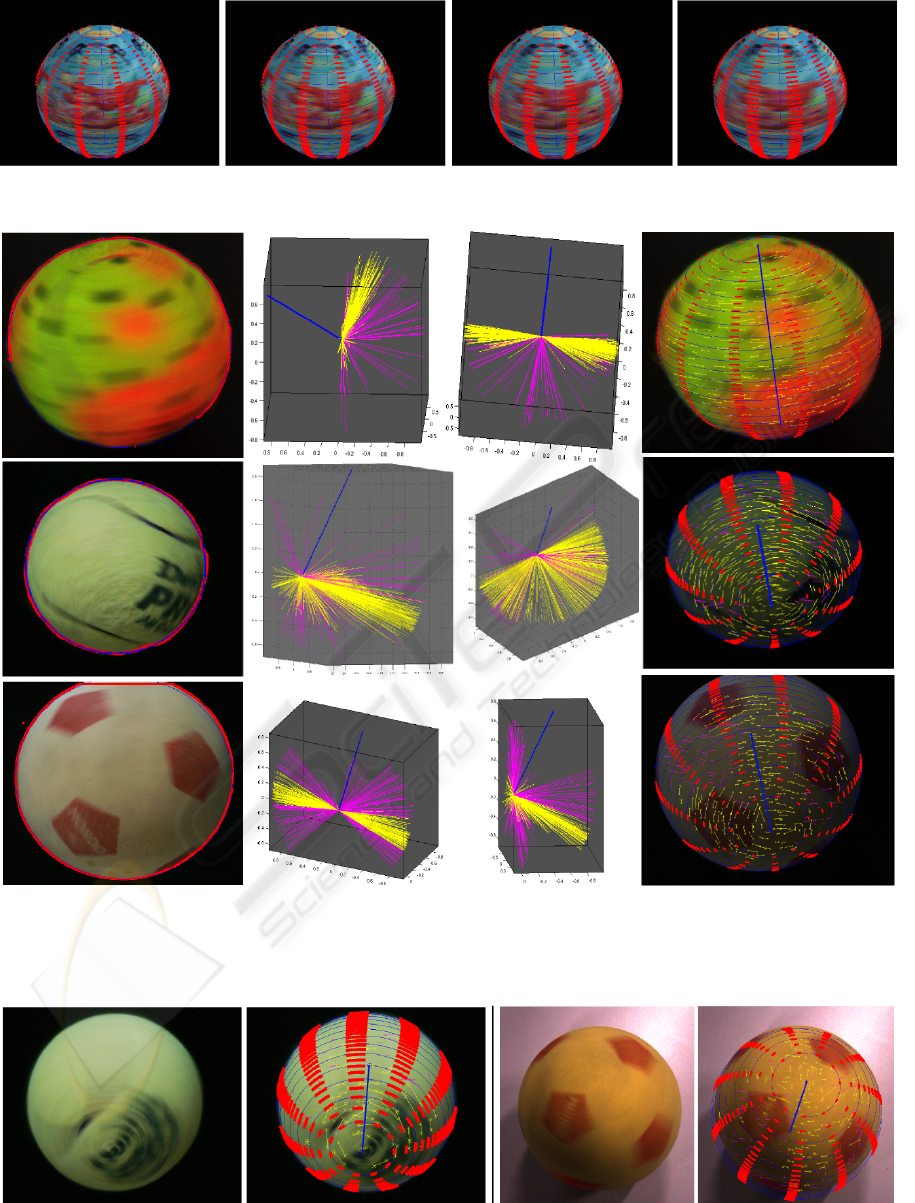
Figure 7: Synthetic image of textured ball at different ω values. From left to right ω · T = 5
◦
;6.875
◦
;8.125
◦
;10
◦
.
Figure 8: Real images (spin only). Central columns shows axis (blue) and v
i
directions from different viewpoints: yellow
ones are inliers, magenta are outliers. Corresponding blur estimates are shown in the rightmost image as yellow segments.
Reconstructed spin axes and speeds correctly explain the blurred image: for example, the spin axis passes through the sharpest
parts of the ball image.
Figure 9: Other real images, and reconstructed motions (spin only). Display colors are the same as in previous figures.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
28

video-based methods fail; target applications include
training support and match analysis in sport environ-
ments.
Other than further improving our software toward
a more robust implementation, we are currently in-
vestigating the practical possibility of estimating spin
axis and velocity without the need of blur extents.
Moreover, we are testing other techniques for blur es-
timation and alpha matting.
REFERENCES
Bertero, M. and Boccacci, P. (1998). Introduction to Inverse
Problems in Imaging. Institute of Physics Publishing.
Boracchi, G. and Caglioti, V. (2007). Corner displacement
from motion blur. In proc. of ICIAP 2007 Conference.
Boracchi, G., Caglioti, V., and Giusti, A. (2007). Ball po-
sition and motion reconstruction from blur in a sin-
gle perspective image. In Inproceedings of ICIAP
2007,Modena.
Caglioti, V. and Giusti, A. (2006). Ball trajectory recon-
struction from a single long-exposure perspective im-
age. In Proc. of Workshop on Computer Vision Based
Analysis in Sport Environments (CVBASE).
Caglioti, V. and Giusti, A. (2007). On the apparent trans-
parency of a motion blurred object. In Proc. of ICCV
workshop on Photometric Analysis in Computer Vi-
sion (PACV) 2007.
Donoho, D. L. and Johnstone, I. M. (1994). Ideal spa-
tial adaptation by wavelet shrinkage. Biometrika,
81(3):425–455.
Fergus, R., Singh, B., Hertzmann, A., Roweis, S. T., and
Freeman, W. T. (2006). Removing camera shake from
a single photograph. In ACM SIGGRAPH 2006 Pa-
pers.
Giusti, A. and Caglioti, V. Isolating motion and color in a
motion blurred image. In Proc. of BMVC 2007.
Gopal Pingali, A. O. and Jean, Y. (2000). Ball tracking
and virtual replays for innovative tennis broadcasts.
In proc. of ICPR 2000 Conference, page 4152, Wash-
ington, DC, USA. IEEE Computer Society.
Harris, C. and Stephens, M. (1988). A combined corner and
edge detector. In Proceedings of the 4th Alvey Vision
Conference,, pages 147–151.
J Ren, J. Orwell, G. J. and Xu, M. (2004). A general frame-
work for 3d soccer ball estimation and tracking. In
Proc. of ICIP 2004 Conference.
Jia, J. (2007). Single image motion deblurring using trans-
parency. In Inproceedings of CVPR 2007, Minneapo-
lis.
Jonathan Rubin, Burkhard C. Wuensche, L. C. and Stevens,
C. (2005). Computer vision for low cost 3-d golf ball
and club tracking. In Proc. of Image and Vision Com-
puting New Zealand.
Kim, T., Seo, Y., and Hong, K.-S. (1998). Physics-based
3d position analysis of a soccer ball from monocular
image sequences. In proc of ICCV 1998 Conference,
pages 721–726.
Klein, G. and Drummond, T. (2005). A single-frame visual
gyroscope. In Proc. British Machine Vision Confer-
ence (BMVC’05), volume 2, pages 529–538, Oxford.
BMVA.
Levin, A. (2007). Blind motion deblurring using image
statistics. In Sch
¨
olkopf, B., Platt, J., and Hoffman,
T., editors, Advances in Neural Information Process-
ing Systems 19. MIT Press, Cambridge, MA.
Levin, A., Fergus, R., Durand, F., and Freeman, W. T.
(2007). Image and depth from a conventional camera
with a coded aperture. ACM Trans. Graph., 26(3):70.
Lin, H.-Y. and Chang, C.-H. (2005). Automatic speed mea-
surements of spherical objects using an off-the-shelf
digital camera. In Mechatronics, 2005. ICM ’05. IEEE
International Conference on, pages 66–71.
Mishima, Y. (1993). Soft edge chroma-key generation
based upon hexoctahedral color space. U.S. Patent
5,355,174.
Ohno, Y., Miura, J., and Shirai, Y. (2000). Tracking players
and estimation of the 3d position of a ball in soccer
games. In ICPR, pages 1145–1148.
Reid, I. D. and North, A. (1998). 3d trajectories from a
single viewpoint using shadows. In proc. of BMVC
1998 Conference.
Rekleitis, I. M. (1996). Steerable filters and cepstral anal-
ysis for optical flow calculation from a single blurred
image. In Vision Interface, pages 159–166, Toronto.
Smith, A. R. and Blinn, J. F. (1996). Blue screen matting.
In SIGGRAPH ’96: Proc. of the 23rd annual con-
ference on Computer graphics and interactive tech-
niques, pages 259–268.
Yitzhaky, Y. and Kopeika, N. S. (1996). Identification of
blur parameters from motion-blurred images. In Proc.
SPIE Vol. 2847, pages 270–280.
SINGLE-IMAGE 3D RECONSTRUCTION OF BALL VELOCITY AND SPIN FROM MOTION BLUR - An Experiment
in Motion-from-Blur
29
