
ANIMATING AND RENDERING VIRTUAL HUMANS
Extending X3D for Real Time Rendering and Animation of Virtual Characters
Yvonne Jung
Fraunhofer IGD, Darmstadt, Germany
Keywords:
Rendering, Virtual Characters, Animation, Simulation, Virtual Reality, X3D.
Abstract:
In this paper, we focus on the different aspects of real time visualization and animation of realistic virtual
characters. The common goal was to come up with solutions based on the concepts of the open ISO standard
X3D and if necessary to propose generalized extensions to the standard. First we describe the high level
control language PML and its implementation, which is also suitable for non-graphics experts. Then we focus
on realistic rendering, how X3D must be extended to allow special effects and realization of novel rendering
algorithms, including skin and emotion rendering. Next we explain the challenges of dynamics related to
virtual characters covering play-back and blending of pre-defined animations, online simulation of locomotion
and last but not least hair simulation.
1 INTRODUCTION
Virtual characters are well known from movies, ads
and computer games. While most of these movies
feature non-realistic characters, e.g. Toy Story, there
are already some showing virtual humans with very
high realism, e.g. Final Fantasy. In first person shoot-
ers like Half-Life 2 we often see realistic virtual char-
acters. But current solutions have major drawbacks
and research is still needed. Today, extreme real-
ism can only be achieved in movies, where real-time
is not an issue at all. Virtual characters in movies
and games are the result of many month of work of
artists. In computer games movements like mimic,
gestures, and locomotion are limited and do not allow
expressive, non repetitive behaviors. Controlling vir-
tual characters needs a lot of CG knowledge. Our vi-
sion is a widespread deployment of interactive and re-
active virtual characters, but today it needs expertise,
much time and effort to use them in an application.
As long as this does not change, we will see charac-
ters in movies and games only. Thus we are working
on solutions to overcome the major barriers concern-
ing rendering aspects. All the work described in this
paper was carried out in the project Virtual Human,
where we were responsible for the graphics output,
meaning the rendering of scenes and realistic virtual
characters as well as playing back animations.
An important topic was to provide an abstract layer
to the graphics environment, because controlling of
character behavior and emotional states was done by
researchers in the area of Artifical Intelligence and
Digital Storytelling. Understandably they did not
want to bother with low-level graphics and demanded
a high level control language where they could issue
commands like ”character one waves hand and simul-
taneously blinks with his eyes”. Therefore we devel-
oped the PML language corporately, and in chapter 2
we will focus on its design from a graphics perspec-
tive. Methods for realistic rendering will be described
in chapter 3. Since realistic characters move around,
gesture and show emotions, dynamics are also essen-
tial, see chapter 4 for further details. Lessons learned,
a summary and outlook for future work conclude this
paper. A common goal was not to develop methods
only suitable to use in our own specialized environ-
ment. We also thought about how virtual characters
could be realized effectively when using a common
standard for interactive 3D like the open ISO standard
X3D. In case it was necessary to extend the standard,
we did also provide appropriate X3D binding specifi-
cations.
2 CONTROLLING GRAPHICS
When visualizing virtual characters one also has to
think about interoperability aspects. PML (Player
Markup Language) is an XML-based Markup Lan-
guage which takes up concepts from RRL (Rich Rep-
387
Jung Y. (2008).
ANIMATING AND RENDERING VIRTUAL HUMANS - Extending X3D for Real Time Rendering and Animation of Virtual Characters.
In Proceedings of the Third International Conference on Computer Graphics Theory and Applications, pages 387-394
DOI: 10.5220/0001093503870394
Copyright
c
SciTePress

resentation Language) for the description of agent be-
havior in net environments (Piwek et al., 2002). It
is an abstract specification language which is inde-
pendent of the implementation of the player and the
virtual environment and is used as descriptive inter-
face markup language between a dialog engine and a
graphics engine. PML is a language for controlling
virtual environments with special regards to character
animation and user interaction, and therefore defines
a format for sending commands to a 3D virtual real-
ity system. Additionally it defines a message format
which can be sent to a player or received from it. At
the beginning of a new scene all objects and charac-
ters are defined by a ”definitions” script. In the course
of the story all runtime dependent actions like char-
acter animations are described by so-called ”actions”
scripts, whereas the temporal order is given by a spe-
cial schedule block. A basic principle in this architec-
ture is the fact that the player is assumed to be ”ig-
norant” without any autonomous behavior. Keeping
in mind, that all rendered geometry has to be created
in a pre-process, it seems to be logical that all objects
including the way they act have to be registered first,
before any action can be triggered. Therefore a PML
script can have the following distinct root elements:
definitions define all possible/ available animations
of a virtual character or an object;
actions contain the schedule of animations, ranging
from key-frame to IK, and similar actions like setting
visibility or starting the TTS system;
message is used for bidirectional communication;
query can be used for retrieving scene information.
The animation tags of a PML actions script re-
fer to preloaded animations, which are referenced by
their name. There are distinguished different kinds
of animations like morph targets for facial anima-
tion (”singlePose”) or key-frame animation for ges-
tures (”multiPoses”), because every animation type
must be handled different and has a varying set of
attributes. An example of a rather unusual anima-
tion which can be handled quite easily this way is
the change of the face complexion. Usually only the
changes in geometry by means of displacers or morph
targets are addressed in computer graphics. This is a
well known problem, and the classification usually is
based on Ekman’s Facial Action Coding System (Ek-
man, 1982), which identifies certain Action Units for
morphing. But with the help of moderngraphics hard-
ware the more subtle changes concerning face color-
ing can also be covered. For some emotions, changing
of skin color is essential for correct perception (e.g.
embarrassment and shock). It is caused by varying
blood circulation and results in pallor or blushing. As
the color variation can be limited to several face ar-
eas, a 3D texture map that denotes these areas can be
used. Just like a stack of plates the 2D images, one
for each complexion, are layered, starting with the
palest face image and ending with the reddest one.
Using this method not only prevents from setting in-
valid emotional stages but also leads to convincing
results by employing texture fetching hardware for
color interpolation by assigning each emotional im-
age a number between zero and one (the intensity),
which then is used for indexing into the 3D texture
image stack (Jung and Kn¨opfle, 2006). The following
actions script (which combines typical facial anima-
tions like blinking with blushing and crying) shows
how such an animation can look like.
<actions id="cde002" start="true">
<character refId="Lebacher">
<speak id="tx">
<text>I am so sorry about this.</text>
</speak>
<startIdleList id="idle1" refId="Blink" />
<complexion id="L1" refId="redHead" />
<complexion id="L2" refId="tears" />
</character>
<schedule>
<seq>
<action refId="idle1" begin="0" dur="0"/>
<par>
<action refId="L1" begin="0" dur="4000"/>
<action refId="L2" begin="0" dur="4000"/>
<action refId="tx" begin="1000" dur="0"/>
</par>
</seq>
</schedule>
</actions>
We used the InstantReality framework (Avalon, 2007)
as the basis for our developments. Here the graph-
ical properties and the behavior of the virtual world
are defined by a scene graph following and extend-
ing the concepts of X3D (Web3DConsortium, 2007).
For handling animations we added some additional
nodes. Below the X3D interfaces are shown. The
”TimelineComposer” is the PML interface and can
be seen as a bindable node. It handles all commu-
nication with the system and forwards PML com-
mands to the parser. During parsing, the schedul-
ing block is sequenced and single action and defini-
tion chunks are created and routed to the appropriate
disposer components. When receiving a start mes-
sage, the scheduler dispatches the action chunks to
the ”AnimationController” node of the correspond-
ing character or object. The ”TimelineComposer”
triggers and holds references to all ”AnimationCon-
troller” nodes, which in turn point to all ”Animation-
Container” node types; i.e. the ”InstantAnimation-
Container” for referring to transitions which are state
changes like toggling visibility or object reposition-
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
388

ing, and the ”TimedAnimationContainer” (including
two specialized subclasses for locomotion generation)
for storing all time based animations like key-frame
animations and inverse kinematics. Because a com-
plex story can lead to an arbitrary number of gestures
or respectively animations, the main job of the ”Ani-
mationController” is to blend and cross-fade all kinds
of animations. This was due to the requirement, that
for correct blending, cross-fading and generally up-
dating all animations of an object at a single time
step, the controlling unit needs knowledge of all ani-
mations, a task which could not be handled with the
simple routing mechanisms of VRML/ X3D.
TimedAnimationContainer : AnimationContainer {
SFString [] name ""
MFNode [] targets []
MFString [] fieldnames []
MFNode [] interpolators []
SFFloat [] duration 0
}
AnimationController : AnimationBase {
SFString [] name ""
MFNode [in, out] animationContainer []
}
TimelineComposer : X3DNode {
SFString [in,out] command ""
SFString [out] message
MFNode [in,out] animationController []
}
3 REALISTIC RENDERING
When looking at games or technical demonstrations,
one might think that most problems are solved and
generalized solutions are standardized and readily
available. But currently for instance the exchange
schema Collada or even X3D do not support ad-
vanced interaction and rendering methods. To over-
come these limitations we present various enhance-
ments to the present X3D standard, comprising nodes
for advanced rendering techniques as well as exten-
sions for animation of characters and implementa-
tion of storylines, allowing application developers to
create and author realistic VR environments easily.
Though, rendering virtual characters has a lot of chal-
lenges. First, the algorithms should be easy to use and
integrate into different applications. Second, to have
flexible control of the character requires a flexible an-
imation system including body movements (gestures,
walking) and speech (TTS, mimics). Then, visual re-
alism means to have realistic models, natural gestures
and a realistic simulation of materials. Finally every-
thing has to be done in real-time, because the interface
must react immediately to user input.
Human skin can be classified according to spatial
scale. The micro scale is defined by cellular elements
whose dominant effects are scattering and absorption.
For approximating subsurface scattering effects, the
distance light travels through skin is measured with
the same technique as is used for shadow mapping
(Green, 2004). Hence we need to introduce multi pass
rendering in the context of X3D, which can be under-
stood in two ways. First, multi pass means the ability
to dynamically render to an off-screen buffer. In the
Xj3D extension (Xj3D, 2004) a simplified possibility
for creating off-screen images was proposed with the
”RenderedTexture” node. Second, multi pass denotes
the ability to render geometry in an ordered sequence,
usually with different drawing operations like blend-
ing enabled, which is currently not possible in X3D.
We are using an extended ”RenderedTexture” to pro-
vide the ability for off-screen rendering including as-
sociated buffers like the depth buffer. It has an addi-
tional field called ”depthMap”, which allows the au-
tomatic generation of depth maps for e.g. additional
user created shadows as needed for the light pass of
the skin shader (Fig. 1). Because this is only useful
in combination with appropriate transformation ma-
trices, the ”projection” (model view projection matrix
of camera space) and ”viewing” fields (model matrix
of parent node) are added.
Figure 1: Light pass - Blur pass - Final render pass.
A person usually has more than 100,000 hairs, which
cannot be simulated in real-time. In order to re-
duce geometric complexity and to avoid rendering
problems we model hair wisps as small quad strips.
For creating an impression of thin, semi-transparent
hair, textures with hair like transparent patterns are
mapped onto the hair patches. To provide an impres-
sion of hair volume, alpha blending is used, which re-
quires correct back-to-front sorting of the hair wisps.
Therefore we propose the ”SortedPrimitiveSet” node
(chapter 4.2). However, for simulated quad strips no
unique sorting order can be determined and therefore
severe sorting artifacts may result. As proposed in
(Scheuermann, 2004), most artifacts can be alleviated
by a multi-pass approach. Although this is only suit-
able for presorted hair without animation, in combina-
tion with our method for rendering human hair (Jung
et al., 2005) it leads to good results. After rendering
all back-facing polygons with depth writes disabled
and depth test set to ”less”, the front-facing polygons
ANIMATING AND RENDERING VIRTUAL HUMANS - Extending X3D for Real Time Rendering and Animation of
Virtual Characters
389
are rendered. This is accomplished by means of our
”MultiPassAppearance” node and the additional use
of special render mode nodes like the ”FaceMode”
and the ”DepthMode” for fine grained render state
control. Multi pass rendering in X3D is thus pretty
easy by using the proposed node extensions.
This shows that for complex rendering tasks con-
trol over the rendering order as well as over low level
rendering modes is needed. Therefore we extended
the X3D Shape component with nodes for setting dif-
ferent render states and therewith the ”Appearance”
node with the appropriate fields. First we introduce
the SFInt32 ”sortKey” field for defining the render-
ing order, what is essential in combination with e.g.
alpha blending or depth writing. For rendering oper-
ations that belong closely together as it is the case for
the two pass hair shader, we also introduce the ”Mul-
tiPassAppearance”. The ”appearance” field simply
contains an ordered sequence of ”Appearance” nodes.
Additionally we propose an ”AppearanceGroup” that
extends the ”Group” node with an ”appearance” field.
This is useful if a whole group of nodes, like head
and hair, share the same material properties as is the
case for the light pass, where the fragment’s distance
to the light source is written and fragments with al-
pha values smaller a certain threshold are discarded.
Besides ”FaceMode” and ”DepthMode” some more
nodes for allowing finer control over rendering states
are also introduced: The ”BlendMode” allows access
to blending and alpha test; ”StencilMode” and ”Col-
orMaskMode” should likewise be self-explanatory. If
the corresponding fields in the ”Appearance” node are
not set, standard settings are used.
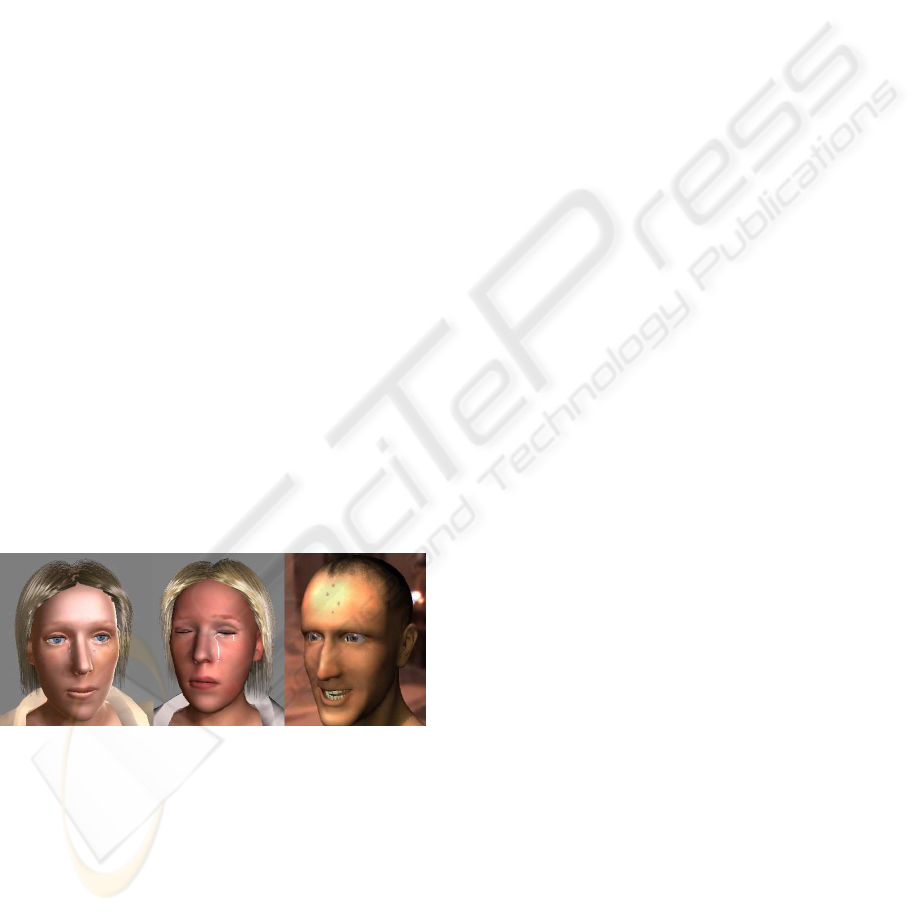
Figure 2: Left: Weeping woman (see ch. 2). Right: Sweat.
The human face communicates with various types
of signals like muscular activity, but it also exhibits
other signals, which are often caused by strong emo-
tions (Kalra and Magnenat-Thalmann,1994). Usually
only the changes in geometry are addressed, but real-
istic skin rendering also requires displaying changes
of skin color dependent on physical conditioning and
emotional state - people always communicate. Some
emotions are also accompanied by other phenomena,
sadness often comes along with tears and sweat can
be a sign of fear. Mostly sweat can be regarded as be-
ing static, but tears have to run down the face. Here
we use the same animation technique as before, but
now with a stack of normal and gloss maps.
4 DYNAMICS
4.1 Playback of Predefined Animations
Dynamics occur in different ways. The most obvious
are the movements of the character, including loco-
motion and gestures. But also human hair is not static
and must be simulated to achieve high visual realism.
Generally spoken two types of approaches can be dis-
tinguished, the play back of predefinedanimation data
on the one hand, and the online computation of ani-
mation data on the other hand. The X3D H-ANIM
component provides support for character animation
based on predefined animations (Web3DConsortium,
2006). It is based on a Skins and Bones model and
defines a common skeletal model including locations
and names of specific bones. Different levels of qual-
ity are defined. The animation data itself is stored in
X3D interpolators; one interpolator per joint, and the
data flow is defined via X3D routes. For simple sce-
narios, like a single animation to be played, H-ANIM
works well, but it is hard to use in cases where multi-
ple animation sets are available, which are combined
and concatenated dynamically during run-time. The
overall structure of such an application gets unman-
ageable and confusing because of the vast amount of
nodes, routes and missing informationabout member-
ship to specific information. Tracing and debugging is
almost impossible, especially when routes are created
and deleted during run-time to blend animations to-
gether in scripts. As already explained, an X3D com-
patible binding is proposed, which introduces several
nodes that primarily act as data containers.
For efficientcombination and concatenation of an-
imations we also need additional information about
the animations, e.g. data look ahead and a list of ac-
tive animations and animations that will be activated
within the next time-frame, which the humanoid an-
imation component does not provide. To solve these
problems we have designed animation storage nodes,
which provide a consistent view on an animation set,
including membership information of nodes to a spe-
cific animation. Furthermore we developed a cen-
tralized control engine for animations, overcoming
the problems mentioned above, which is explained in
chapter 2. For doing convincing character animation
in complex and responsive environments, H-ANIM
needs to be extended for incorporating blending of
different animations like waving and turning around
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
390

at one single time step, which cannot be accomplished
with current X3D concepts. The same goes for cross-
fading different succeeding animations in order to al-
leviate jerky leaps between e.g. an idle motion and
a subsequent gesture. By using our previously ex-
plained animation controlling extension, mixing of
animations can be easily done in X3D. This is concep-
tually the same for facial animation based on morph
targets (Alexa et al., 2000) or the H-ANIM displacer
nodes. Both above mentioned types of mixing ani-
mations are realized with geometric algebra (Hilden-
brand, 2005) which especially for rotations is superior
to simple linear interpolation schemes. But there are
still some issues, mainly due to unsuitable animation
data. If the spatial distances between the first and the
last animation frame are too big, this either leads to
jerks or to sliding effects, depending on the blending
parameters, which in the latter case introduce damp-
ing effects if too many time steps are averaged.
Figure 3: Unit hemisphere with reference quaternion q
∗
.
Rotations internally are represented as unit quater-
nions. Because the same rotation can be described by
the quaternions q and −q, care must be taken when
blending quaternions. In order to get a unique de-
scription of a rotation, we first define a 4d unit hemi-
sphere, on whose surface S the unit quaternionsare lo-
cated. Following (Park et al., 2002), the initial choice
of the hemisphere is based on an arbitrarily chosen
reference quaternion (e.g. the first one, depicted as
q
∗
in Fig. 3). Our simplified method is based on
the observation that the reference quaternion q
∗
, any
other quaternion q and the origin of the 4d unit sphere
are always coplanar. With the additional constraint,
that all unit quaternions are located on the same hemi-
sphere S, the maximum angular separation between q
and q
∗
is 90
◦
. The maximum distance directly results
from Pythagoras:
√
1
2
+ 1
2
=
√
2. By calculating the
Euclidian distance d between q
∗
and any quaternion
q, we can check, if q lies on the reference hemisphere
by comparing d with
√
2. If d >
√
2, then q doesn’t
lie on S. By simply negating q the given rotation is
represented by a quaternion being located on S. In
the last step all quaternions are multiplied with their
weights, summed together and finally normalized for
obtaining the interpolation result.
4.2 Realistic Simulation of Hair
The renderingof long, light colored hair is much more
complex than that of short, dark hair. Thus due to
the translucent characteristics of hair fibers the addi-
tional consideration of transmission, dispersion and
self shadowing is required. In case of direct lighting,
there are two different specular highlights (Scheuer-
mann, 2004). The first one results from direct reflec-
tion at the surface of a hair fiber. The second highlight
results from internal reflection. The incident light
passes through the interior of the fiber and is reflected
at the opposite side of the cylindrical shape. Because
of refraction the light’s direction changes, so the sec-
ondary peak appears shifted towards the hair tip. The
highlight is weaker and gets colored by the pigments
of the hair. In order to calculate the different peaks
described above, two tangents T’ and T” are needed,
which are shifted in opposite directions. This can be
achieved by adding a scaled normal onto the original
tangent T, given by the hair’s direction, which is up-
dated during the simulation anyway.
Figure 4: Left: Man with a beard. Right: Hair simulation.
Deformable materials like hair or cloth are often sim-
ulated by using mass spring systems. They can be
calculated with the help of differential equations by
equating Newton’s second law of motion (F = ma =
m¨s) and Hook’s law (F = ks), which relates the force
F exerted by a spring with spring constant k and rest
length l to its deflection s = l
′
−l. But explicit numer-
ical methods for solving these equations do not nec-
essarily converge if forces are too strong and the size
of the time step lies above a certain threshold. Our
hair simulation is derived from the cantilever beam
method (Anjyo et al., 1992), which originally was in-
tended for hair modeling. Compared to mass spring
approaches, it provides a numerically simpler and vi-
sually more convincing way to simulate hair. The
most important difference of kinematic models com-
pared to mass spring systems is that the initial dis-
ANIMATING AND RENDERING VIRTUAL HUMANS - Extending X3D for Real Time Rendering and Animation of
Virtual Characters
391
tance l can be fully conserved. Because neighbor-
ing elements don’t interact by means of spring forces,
oscillations can’t occur. Thus a kinematic simula-
tion system keeps stable even with much bigger time
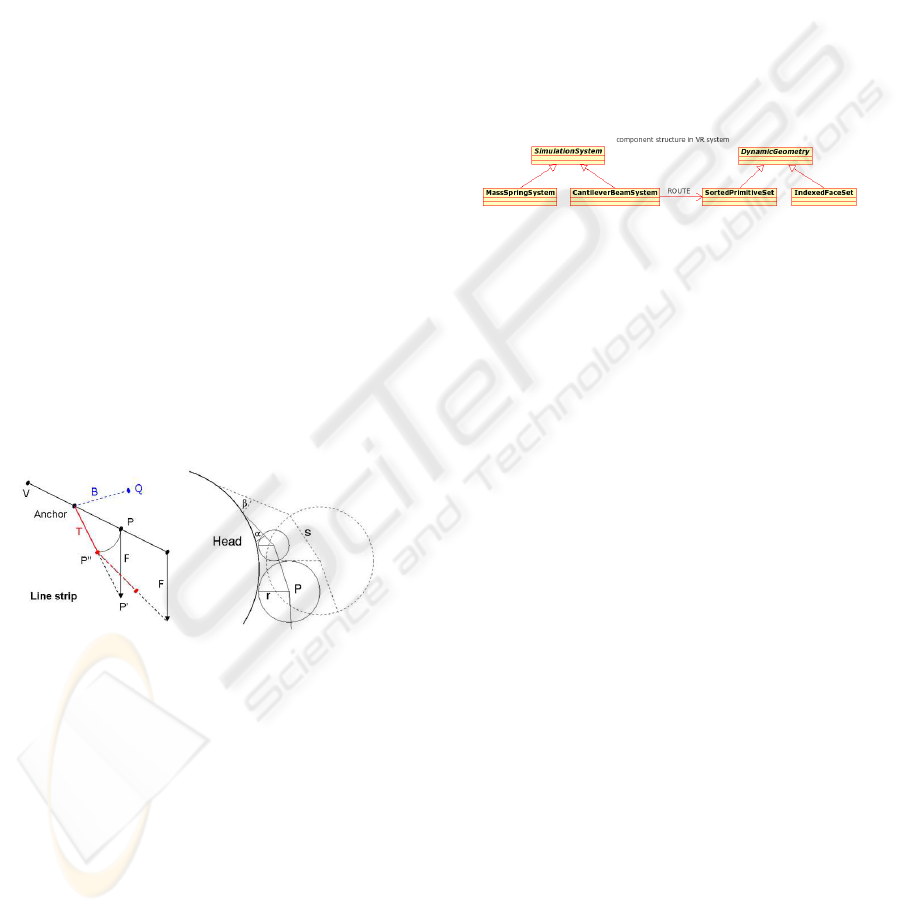
steps. Our modified cantilever beam algorithm inter-
nally works on a kinematic multi-body chain, as il-
lustrated in Fig. 5, left. The nodes of the multi-body
chain are defined by the vertices of the original geom-
etry. Two types are distinguished, anchors and free
moving vertices. Anchors are connected to the scalp,
whereas all other vertices in the chain are free mov-
ing, due to external forces like gravity, and by apply-
ing the length conservation constraint.
Besides a convincing simulation a natural behav-
ior in case of collisions is also required. Collisions
with the body are a hard constraint and must be treated
explicitly. Thus for approximation we use objects like
spheres, ellipsoids and planes, for which intersection
tests can be handled efficiently. Hair-hair collision
can’t be handled easily in real-time. Thus the inter-
penetration of hair wisps is avoided by using a slightly
different bending factor for every chain, based on the
position of its respectiveanchor, and by arranginghair
strips on top of the scalp in different layers within a
different distance to the head. For keeping this up
during dynamics, each vertex, depending on its posi-
tion, is assigned a virtual collision sphere with a dif-
ferent radius, in order to parameterize the distance to
the head individually (Fig. 5, right).
Figure 5: Simulation step; T and B resemble a quad strip.
SortedPrimitiveSet : X3DComposedGeometryNode {
SFString [in,out] mode "QuadSet"
SFString [in,out] drawOrder "BackToFront"
SFNode [in,out] refPoint NULL
SFNode [in,out] coord NULL
SFNode [in,out] color NULL
SFNode [in,out] normal NULL
SFNode [in,out] texCoord NULL
SFNode [in,out] tangent NULL
MFInt32 [in,out] index []
SFFloat [in,out] lowerBound 0.25
SFVec4f [in,out] upThreshold 0 1 0 0.85
}
All special simulation and rendering components are
implemented as scene graph nodes in Avalon. The
rendering component consists of the hair appearance
and the ”SortedPrimitiveSet” node. It holds all geo-
metric properties like positions, indices and tangents
and is responsible for the CPU based part of the sort-
ing algorithm. The latter can be parameterized by the
”drawOrder” field, the ”upTheshold” field for defin-
ing the threshold for a second sorting step, and the
”lowerBound” field for determining the percentage of
quad strips which can be omitted after sorting during
rendering due to occlusion. Because of its generic
design our proposed ”SortedPrimitiveSet” node like-
wise is useful for similar usages like rendering grass.
It is updated via the X3D routing mechanism by the
simulation component. This way the shaders only be-
long to the appearance nodes and are therefore inter-
changeable and easily to parameterize.
Figure 6: Component structure in VR system.
As shown in Fig. 6 we also propose some simula-
tion system nodes. The ”MassSpringSystem” is suit-
able for applications like cloth simulations. It inher-
its from our abstract ”SimulationSystem” base node
and is strictly separated from geometry and appear-
ance components for maximum flexibility. The al-
ready described ”CantileverBeamSystem” for simu-
lating hair also inherits from the ”SimulationSystem”.
With the ”collisionDomainType” and ”collisionDo-
mainParam” fields collision objects can be specified,
and because full triangle tests would be too expen-
sive, the ”massRadius” field can be used for setting
the distance between connected vertices.
SimulationSystem : X3DNode {
SFBool [in,out] enabled TRUE
SFTime [in,out] time 0
SFInt32 [in,out] minStepsPerFrame -1
SFInt32 [in,out] maxStepsPerFrame -1
SFTime [in,out] maxStepTime -1
SFBool [in,out] localCoordSystem TRUE
MFInt32 [in,out] index []
MFInt32 [in,out] anchorIndex []
MFVec3f [in,out] coord []
MFVec3f [in,out] normal []
MFString [in,out] collisionDomainType []
MFFloat [in,out] collisionDomainParam []
SFVec3f [in,out] gravity 0 -9.81 0
SFVec3f [in,out] externalForce 0 0 0
SFFloat [in,out] massRadius 1.0
SFFloat [in,out] staticFriction 0.5
SFFloat [in,out] slidingFriction 0.5
SFFloat [in,out] airFriction 1.0
}
CantileverBeamSystem : SimulationSystem {
MFVec3f [in,out] tangent []
MFColor [in,out] color []
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
392

MFVec2f [in,out] texCoord []
MFVec3f [in,out] refPoint []
SFFloat [in,out] minBend 0.05
SFFloat [in,out] maxBend 0.1
}
4.3 Simulation of Locomotion
Capturing and processing motion data is a tedious and
time consuming task. Thus a better solution would be
to automatically generate them. Furthermore there are
animations whose appearance is not known upfront
because they depend on external parameters. Exam-
ples are pointing gestures, where the direction is cal-
culated during run-time, e.g. pointing towards a mov-
ing object, and character locomotion, where the target
is defined during runtime (”go to the red cube”). In
the following we will focus on locomotion, i.e. walk-
ing. Basically there exist two types of approaches for
automatic generation of walking animations (Multon
et al., 1999). The first one tries to simulate the phys-
iology of the human body using kinematics or dy-
namic constraints. The flexibility is very high, be-
cause theoretically any kind of human motion can be
calculated, but for decent results the complexity of
such simulations is very high, too. The second type
adapts captured animation data according to exter-
nal parameters, e.g. ”interpolation” between walking
and running to attain jogging. Here the complexity is
lower, because originalities of human walking are al-
ready defined in the animation sets. The drawback of
these approaches is the need for motion data upfront.
The most promising approach we found was the
one described by (Park et al., 2002; Park et al., 2004),
which synthesis animation data from previously cap-
tured animation data according to different parame-
ters, e.g. mood of character and style of walking.
In a first step one has to preprocess the motion data
and create animation sequences. Each sequence com-
prises of one walking cycle with fixed speed, angle
and mood. To walk on a given path or towards a
specified target the sequences are automatically con-
catenated during runtime. The values itself are inter-
polated according to the input values defined by the
application. We integrated the algorithm into Avalon
and generated the necessary motion data with a spe-
cially written exporter. The calculation of the anima-
tion data (56 joints, 27 example motions, 3 parameter
dimensions) took approx. 30 ms on a Pentium 4 with
2.4 GHz, thus it was real-time capable. The visual
results were very convincing; especially the concate-
nated walking cycles looked very lifelike.
Figure 7: Different walking styles.
4.4 Content Creation
Content creation embraces the creation of the charac-
ters geometry including materials as well as anima-
tions, the scene, the behavior and the overall ”story”.
For the creation of the digital story several methods
can be used. Advanced ones provide non-linear sto-
rytelling and adaptive dialogues. But there are many
applications where this complexity is not necessary.
For such cases we developed simpler tools allowing
us to put together story-lines in an easy and intuitive
way. As described earlier, a story can be described
with PML. It allows defining when and what a char-
acter or object in the scene is doing and how/when the
user can interact with the virtual environment. To al-
low interactions by the user and to change the flow of
the story, we define short acts and transform them into
PML scripts. A short act could be a dialogue between
two characters on a given topic. Such PML scripts
will be stored in special ”SceneAct” nodes which are
connected by routes. The routes define the flow of the
story. As soon as such a node gets a trigger on its in-
put field, its PML script will be executed. The ”url”
field holds the corresponding PML script, whereas the
”run” and ”finished” SFBool fields are used for the
story graph composition. By adding other nodes in
the route graph, we easily can add some non-linearity
and possibilities for user interaction to the story.
5 RESULTS AND CONCLUSIONS
In this paper we described results we achieved in the
Virtual Human project concerning rendering and an-
imation of virtual characters. First extrinsic factors
like properties of human skin and hair were incor-
porated. For modeling behavioral aspects intrinsic
factors were also considered, including control lan-
guages, emotions, and animations in general. Though
the rendering of scene and virtual characters was not
only aimed for photorealism but also the behavior
had to be modeled as realistic as possible. During
the project we realized that realistic real-time ren-
dering techniques well-known from modern computer
games, such as image-based rendering as well as tech-
niques requiring fine grained render state access were
mostly ignored in the field of MR/ VR. The same goes
ANIMATING AND RENDERING VIRTUAL HUMANS - Extending X3D for Real Time Rendering and Animation of
Virtual Characters
393

for the real-time simulation of deformableobjects like
cloth and hair. Although a lot of work already is done
towards realistic rendering and simulation, research
usually is conducted in a standalone application with-
out embedding the algorithms into a wider field of
applications as is needed for e.g. X3D, which is not
only an open standard for interactive 3D graphics but
is also easy to learn for non-programmers. Thus we
proposed extensions of the standard, which were eval-
uated in two different scenarios.
One major goal was visual realism, where we face
the same problems as research on humanoid robots:
the ”uncanny valley”, a hypothesis introduced by M.
Mori in 1970. He states that as a robot is made more
human-like, the emotional response from a human be-
ing to the robot will become increasingly positive and
empathic, until a point is reached beyond which it
becomes strongly repulsive. But as appearance and
motion continue to become less distinguishable from
a human being’s, the emotional response becomes
positive again and approaches human-human empa-
thy levels. This also holds for virtual characters, and
for convincing results we have to come very close to
human-like appearance and behavior. We have devel-
oped powerful algorithms to improve rendering, even
taken care of dynamics. But by simply applying them
to a character model leaves us deeply stuck inside the
uncanny valley without attaining convincing results,
because parameter optimization is still tedious and
has to be done by experts. An example is the forth-
coming game from Crytek, which was postponed sev-
eral times although lots of people are working on it.
So, automatic generation of realistic virtual humans is
not possible without human intervention. One solu-
tion could be to setup libraries a user can choose from
and to have authoring tools, which guide through the
creation process, starting at a very coarse level, and
refining the choices step by step.
Concerning recorded motion capturing data the
biggest problem was the data quality. Without heavy
manual work one will face ”floating” characters or
strange artifacts when blending between two very dif-
ferent poses. Since any kind of blending does ”inter-
polation” in some way there will be always cases were
blending will fail and deliver unsatisfactory results.
Without model knowledge or very accurate animation
data we will not be able to blend animations convinc-
ingly. So, prerecorded animation must be planned ac-
curately. It should be defined which is the starting
and which is the ending pose as well as which joints
are involved. Blending between very different poses
therefore should be avoided. To increase flexibility
research should focus on automatic real-time capable
methods for the creation of animation data.
ACKNOWLEDGEMENTS
This work was part of the project Virtual Human
funded by the German ministry for edu. and research.
REFERENCES
Alexa, M., Behr, J., and M¨uller, W. (2000). The morph
node. Web3D - VRML 2000 Proc., pages 29–34.
Anjyo, K.-I., Usami, Y., and Kurihara, T. (1992). A simple
method for extracting the natural beauty of hair. In
SIGGRAPH ’92, pages 111–120. ACM Press.
Avalon (2007). Avalon. http://www.instantreality.org/.
Ekman, P. (1982). Emotion in the human face. Cambridge
University Press.
Green, S. (2004). Real-Time Approximations to Subsurface
Scattering, pages 263–278. Add. Wes.
Hildenbrand, D. (2005). Geometric computing in computer
graphics using conformal geometric algebra. In CG
2005, volume 29, pages 802–810.
Jung, Y. and Kn¨opfle, C. (2006). Dynamic aspects of real-
time face-rendering. In VRST 2006, pages 193–196,
New York. ACM: VRST Cyprus 2006.
Jung, Y., Rettig, A., Klar, O., and Lehr, T. (2005). Realistic
real-time hair simulation and rendering. In VVG 05,
pages 229–236, Aire-la-Ville. Eurographics Assoc.
Kalra, P. and Magnenat-Thalmann, N. (1994). Modeling
of vascular expressions. In Computer Animation ’94,
pages 50–58, Geneva.
Multon, F., France, L., Cani-Gascuel, M.-P., and Debunne,
G. (1999). Computer animation of human walking:
a survey. The Journal of Visualization and Computer
Animation, 10(1):39–54.
Park, S., Shin, H., Kim, T., and Shin, S. (2002). Online
locomotion generation based on motion blending. In
ACM Symposium on Computer Animation.
Park, S., Shin, H., Kim, T., and Shin, S. (2004). Online
motion blending for real-time locomotion generation.
In Comp. Anim. and Virt. Worlds. John Wiley a. sons.
Piwek, P., Krenn, B., Schr¨oder, M., Grice, M., Baumann, S.,
and Pirker, H. (2002). Rrl: A rich repr. lang. for the
desc. of agent behaviour in neca. In Proc. of WS ”Em-
bodied convers. agents, let’s spec. and eval. them”.
Scheuermann, T. (2004). Practical real-time hair rendering
and shading. Siggraph 04 Sketches.
Web3DConsortium (2006). H-Anim.
http://www.web3d.org/x3d/specifications/ISO-
IEC-19774-HumanoidAnimation/.
Web3DConsortium (2007). Extensible 3D (X3D).
http://www.web3d.org/x3d/specifications/ISO-IEC-
19775-X3DAbstractSpecification
Revision1 to Part1/.
Xj3D (2004). Xj3d dynamic texture rendering ext.
http://www.xj3d.org/extensions/render
texture.html.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
394
