
THE GROUNDED HEIGHTMAP TREE
A New Data Structure for Terrain Representation
J. Alonso and R. Joan-Arinyo
Grup d’Inform`atica a l’Enginyeria
Escola T`ecnica Superior d’Enginyeria Industrial de Barcelona
Universitat Polit`ecnica de Catalunya, Av Diagonal 647, 8
a
, 08028 Barcelona, Spain
Keywords:
Digital terrain model, Terrain modelling, Heightmaps.
Abstract: Terrain modeling is a fast growing field with many applications such as computer graphics, resource man-
agement, Earth and environmental sciences, civil and military engineering, surveying and photogrammetry
and games programming. One of the most widely used terrain model is the Digital Elevation Model (DEM).
A DEM is a simple regularly spaced grid of elevation points that represent the continuous variation of relief
over space. DEMs require simple storage and are compatible with satellite data. However, they do not easily
account for overhangs.
In this work we report on the Grounded Heightmap Tree, a new data structure for terrain representation built
as a generalization of the DEM. The new data structure allows to naturally represent terrain overhangs. We
illustrate the performance of the Grounded Heightmap Tree when applied to represent terrains that undergo
big changes.
1 INTRODUCTION
Terrain modeling is a fast growing field with many ap-
plications such as computer graphics, resource man-
agement, Earth and environmental sciences, civil and
military engineering, surveying and photogrammetry
and games programming. Since, in general, terrain
models store huge amount of data, and applications
must be highly responsive, having a model that al-
lows quick answers to the queries on it would be para-
mount.
One of the terrain models most widely used is
the Digital Elevation Model (DEM), also known as
heightmap, that requires simple storage, is compatible
with satellite data and allows good and simple surface
analysis. On the other hand, they are slow to compute
and are severely limited by the need of the uniform
sampling and do not easily account for overhangs.
This work reports on the development of a new data
structure, called Grounded Heightmap Tree, to model
and deal with terrains that change at a high rate to
capture, for example, big changes resulting from geo-
tectonic events. It is a generalization of the heightmap
model and accounts for hangovers.
2 TERRAIN MODELS
Basically, terrain models belong to one one of three
categories: Digital Elevation Models (DEM), Trian-
gulated Irregular Networks (TIN) and Fractal Mod-
els. DEMs have been applied to represent terrains
over uniformly distributed sample points. TINs allow
representing real terrains with a high fidelity over ir-
regular networks of sample points. Fractal Models are
used to represent terrain models randomly generated.
2.1 Digital Elevation Model
DEMs are based on a simple structure named
heightmap also known as heightfield. A heightmap
is simply a 2D array of values which give the terrain
elevations for ground positions sampled at regularly
spaced horizontal intervals. Each value in the array
represents the height of the terrain at that value’s po-
sition. See Figure 1, (Robot-frog, ). For example, if
the cell at (2, 3) has a value of 2, then the terrain con-
tains the point (2, 3, 2).
On the one hand, DEMs require simple storage,
are compatible with satellite data and allow good and
simple surface analysis. On the other, they are slow
to compute and are severely limited by the need of
the uniform sampling and do not easily account for
80
Alonso J. and Joan-Arinyo R. (2008).
THE GROUNDED HEIGHTMAP TREE - A New Data Structure for Terrain Representation.
In Proceedings of the Third International Conference on Computer Graphics Theory and Applications, pages 80-85
DOI: 10.5220/0001094300800085
Copyright
c
SciTePress
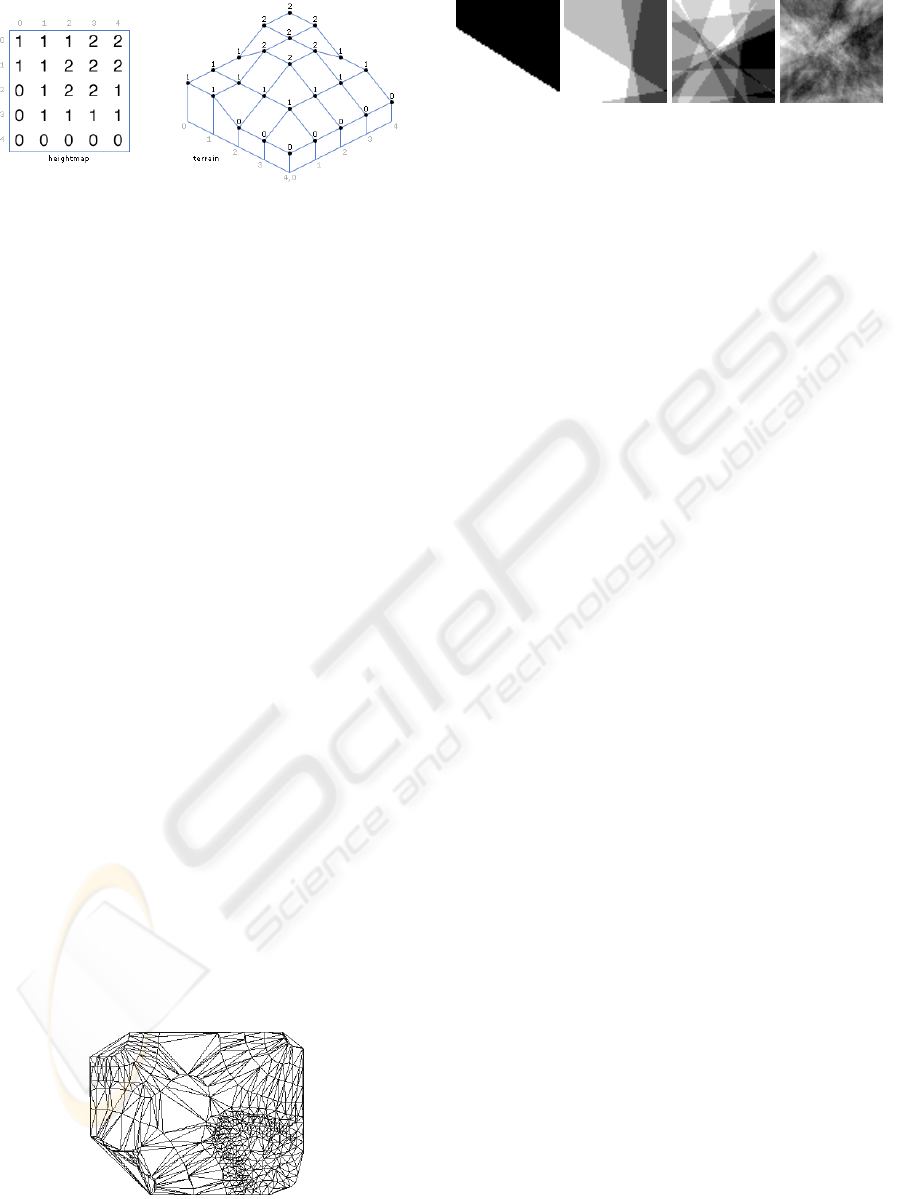
Figure 1: Digital Elevation Model. Left) Heightmap. Right)
3D terrain wireframe.
overhangs.
2.2 Triangulated Irregular Networks
A TIN is a DEM with a network of non-overlapping
triangles whose vertices are placed at randomly lo-
cated terrain points. These triangles are formed usu-
ally under Delaunay criterion. Irregular spaced sam-
ple points are measured with more points in areas of
rough terrain and fewer in smooth terrain which re-
sults in an accurate representation of the terrain. Fig-
ure 2 shows a TIN, (Klinkenberg, ).
Pros of the TINS are that they need fewer points
than DEMs for the same accuracy, their resolution
naturally adapts to terrain roughness. Among the
drawbacks we find that initial construction is time
consuming and some operations do not have efficient
algorithms.
2.3 Fractal Models
Historically, fractals have been one of the pioneering
technique representation chosen by terrain rendering
and visualization researchers. Examples of methods
to generate fractal terrain models are diamond-square
algorithm, fault algorithm and the hill algorithm.
These techniques take as input a 2D array whose cells
are properly initialized, and iteratively transform it
until a final terrain representation is reached.
The diamond-square algorithm is a method for
generating highly realistic heightmaps for computer
Figure 2: Triangulated Irregular Network.
Figure 3: Fault formation. Terrain height map evolution as
the number of iterations increases.
graphics, (Martz, ). The starting point for the itera-
tive technique sets the four corner points of an array
to the same height value. Notice that what we have
got is a square. Then there are two different possi-
ble steps: the diamond step or the square step. The
diamond step takes a square and generates a random
value at the square midpoint, where the two diagonals
meet. The midpoint value is calculated by averaging
the four corner values, plus a random amount. This
gives us diamonds when we have multiple squares
arranged in a grid. The square step takes a diamond
and generates a random value at the center of the dia-
mond. The midpoint value is calculated by averaging
the corner values, plus a random amount generated in
the same range as used for the diamond step. This
gives us squares again. Now the algorithm iterates
performing one diamond step, one square step and a
reduction of the random values range until the length
of the squares side is smaller than a given threshold.
Fault formation is a very simple one, yet its re-
sults, although not the best, are pretty good, (Fault
algorithm, ). The technique is not limited to pla-
nar height fields, being also applicable to spheres to
generate artificial planets. Hugo Elias (Elias, ), has
posted tutorials on the application of this algorithm to
spheres. To start with we have a planar height field,
where all points have zero height. Then we select
a random line which divides the terrain in two parts
(in general these parts will be different in size). The
points to one side of the line will have their height
displaced upwards, whereas the points on the other
side will have their heights displaced downwards. So
now we have a terrain with two distinct heights. If
we keep dividing the terrain like this then we will get
something that has valleys, mountains and so on. Fig-
ure 3 illustrates the process where the 2D array is re-
cursively split.
The hill technique can be seen as a kind of fault
formation where the straight line used to divide the
terrain is replaced with an sphere. The basic idea is
simple, (Robot-frog, ). Start with a flat terrain (ini-
tialize all height values to zero). Pick a random point
on or near the terrain, and a random radius between
some predetermined minimum and maximum. Care-
fully choosing these values will make a terrain rough
and rocky or smooth and rolling. Raise a hill on the
THE GROUNDED HEIGHTMAP TREE - A New Data Structure for Terrain Representation
81

Figure 4: Left: Isolated hill. Right: The model after several
iterations.
terrain centered at the point, having the given radius.
Repeat the two previous steps as many times as neces-
sary. Notice that the number of iterations chosen will
affect the appearance of the terrain. Figure 4 depicts
on the left an isolated hill and on the right the model
after performing several iterations.
3 THE GHT MODEL
As presented in Section 2, heightmaps offer a good
balance between complexity and performance. How-
ever, this balance is broken when trying to capture
terrains with overhangs. The GHT model presented
in this work is a generalization of the heightmaps that
easily accounts for both overhangs and tunnels while
basically keeping the simplicity of heightmaps. It is
specially well suited to capture terrains built through
a sculpting process from an initial 2D grid of terrain
elevations.
3.1 Definitions
The model definition is rather simple. The grounded
heightmap tree is a tree where the nodes are grounded
heightmaps and the edges are pointers to other
grounded heightmaps.
A grounded heightmap is a ground plane along
with an axis aligned 2D array of data cells. The
ground plane is defined by a point and the direction
vector. Each data cell contains a height measured
with respect to the ground plane along its direction
vector, and a pointer to some data cell in a different
grounded heightmap. To properly manage carvings
and hangovers, the GHT model includes the
type
tag
which distinguishes whether a grounded heightmap is
an outdoor area, is an indoor area (carving or hang-
over) or is a heightmap which defines the transition
between indoor and outdoor areas. Figure 5 shows
the GHT data type definition using C-like notation.
3.2 Model Construction
Constructing a GHT model starts with just one
grounded heightmap whose ground plane is the XZ
typedef struct{
DataArray data;
GroundPlane gplane;
GroundedHeightmap *child;
TerrainType type;
} GroundedHeightmap;
typedef DataArray DataCell [1..N][1..N];
typedef struct{
int height;
LinkGHM link;
} DataCell;
typedef struct{
CellIndex index;
GroundedHeightmap *gh;
} LinkGHM;
typedef struct{
int i;
int j;
} CellIndex;
typedef struct{
Point3D point;
Vector3D normal;
} GroundPlane;
typedef struct{
float x, y, z;
} Point3D;
typedef struct{
float x, y, z;
} Vector3D;
typedef enum {
OUTDOOR, INDOOR, BORDER
} TerrainType;
Figure 5: Grounded Heightmap datatype.
plane with the Y axis as direction vector, and whose
2D array of values gives the terrain elevations with
respect the ground plane. No overhangs are included.
The height data can be defined, for example, by hand
or captured from satellite data. The links to grounded
heightmaps are all null.
The initial GHT model is edited by applying a se-
ries of basic operations or events. The algorithm in
Figure 6 illustrates this process. If ght is a properly
initialized GHT model and e is the event to be ap-
plied, first the heightmap,
hmap
, on which the edit-
ing will take place is identified.
hmap
is the deepest
heightmap in the GHT model such that includes the
terrain region affected by the event and whose cells
contain either a height or a valid link to a grounded
heightmap. Then a set of new heightmaps configured
according to the type of event, that we will define later
on, is created. These heightmaps contain also infor-
mation needed to place them with respect to the
hmap
heightmap. To apply the event means to assign to
the new nodes the information that locally describes
the terrain according to the event considered. Finally
the new heightmaps are attached to the GHT model
through the
hmap
.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
82

procedure DispatchEvent (ght, e)
hmap := IdentifyHmap (ght, e)
newheightmaps := CreateHeightmaps (hmap, e)
ApplyEvent (hmap, e, newheightmaps)
AttachNewHeightmaps (hmap, newheightmaps)
endprocedure
Figure 6: Editing the GHT.
Procedure
ApplyEvent()
considers two families of
events: geotectonic and carvings. Geotectonic events
include linear and radial erosion and, normal, inverse
and lateral faults. Carvings include tunnels and caves.
Each basic operation is defined by a set of parameters
and the effect on the terrain will depend on the spe-
cific values assigned to them when the operation is
triggered. Next we detail how each family of events
is applied.
Figure 7 illustrates the geometry generated by the
geotectonic events we consider. Linear erosion needs
four grounded heightmaps and is defined by two
points and an scalar. Points fix the position and length
of the erosion, the scalar fixes the erosion depth. Ra-
dial erosion needs one grounded heightmap and is de-
fined as an ellipsoid given by the radii and center. Pa-
rameters in faults are defined by two points that define
position and length, plus an scalar that fixes the terrain
surface area affected by the event. Normal and in-
verse faults need three grounded heightmaps and lat-
eral faults need two grounded heightmaps.
The algorithm in Figure 8 describes how geo-
tectonic events are dealt with. First for each new
heightmap in the event, the boundaries of the af-
fected local terrain region are projected onto the XZ
plane. Then for each cell in the 2D array of the new
heightmap within the projected boundaries of the af-
fected region, we apply the following process. If the
current new heightmap and
hmap
have the same orien-
tation and the
hmap
cell is a height, the newheightmap
cell value is the height in
hmap
. If the
hmap
cell is a
link, the newheightmap cell is a link to the considered
hmap
cell.
When the new heightmap and
hmap
have different
orientations the situation is a little bit more complex.
We have to assign to the cells in the new heightmap
values taken from
hmap
. Since the ground plane
of the new heightmap is at an angle with the
hmap
ground plane, in general, the 2D cell array of the new
heightmap has more cells than that of
hmap
. Height
values for the extra cells in the new heightmap are
computed applying a simple linear interpolation.
After defining a new heightmap, those cells in
hmap
whose values have been transferred to the new
heightmap no longer represent a valid height. There-
fore the links in
hmap
point to the corresponding cells
procedure GeotectonicEvent (hmap, e, newheightmaps)
for hm in newheightmaps do
bound := ComputeBoundary (hm, e)
if SameOrientation(hmap, hm) then
FillData(hmap, hm, e, bound)
else
FillInterpolatedData(hmap, hm, e, bound)
endif
UpdateHmap(hmap, hm)
PreserveGHTContinuity(hmap, hm, e, bound)
endfor
endprocedure
Figure 8: Geotectonic event algorithm.
in the new heightmap. Finally to preserve GHT con-
tinuity each cell in the boundary of a new heightmap
is linked to the neighbor cell in another heightmap.
Carving events are defined in two steps. First a
protovolume is defined by sweeping a cross section
along a rectilinear axis. Then the carving is gener-
ated by subtracting the protovolume from the terrain
model.
The protovolume is characterized by two points,
a polygonal cross section, and two scalars. The two
points define both the axis and span of the protovol-
ume. The polygonal cross section defines the carv-
ing cross shape. Each scalar is used to scale respec-
tively the cross section to its actual size at the begin-
ning and at the end of the protovolume. The num-
ber of grounded heightmaps in a carving tunnel is the
number of sides in the polygonal cross section plus
two heightmaps that define the indoor-outdoor bor-
ders. The ground planes of these heightmaps are co-
incident with the XZ plane. In the carving cave, we
have one heightmap that defines the cave entry and
another one that defines the cave end. Carving events
can be applied only on the GHT root node since so
far we only support them on the XZ plane. Figure 9
left illustrates the shape generated by tunnel carving.
Figure 9 right depicts the shape generated by carving
a cave.
The carving process algorithm its outlined in Fig-
ure 10. First the algorithm extracts from the event
Figure 9: Carving events.
THE GROUNDED HEIGHTMAP TREE - A New Data Structure for Terrain Representation
83

Figure 7: Geotectonic operations on GHT models.
procedure CarvingEvent(ght, e, newheightmaps)
BorderInnerNodes (newheightmaps, iheightmaps,
bheightmaps)
for hm in bheightmaps do
bound := ComputeBorderBoundary (ght, hm, e)
FillBorderData(ght, hm, e, bound)
LinkRootToBorder(ght, hm, e, bound)
UpdateHmap(ght, hm)
endfor
for hm in iheightmaps do
bound := ComputeInnerBoundary (ght, hm, e)
FillNoiseData(hm, bound)
endfor
LinkBorderToInner(bheightmaps, iheightmaps)
LinkRingInner(iheightmaps)
endprocedure
Figure 10: Carving process algorithm.
heightmaps,
newheightmaps
, those that define the
carving walls,
iheightmaps
, and the heightmaps of
the indoor-outdoor borders,
bheightmaps
.
For each indoor-outdoor border heightmap, first
the set of cells that define the heights for the carving
cross section,
bound
, is computed. To preserve model
continuity, bound cells are linked to their neighbor
cells in
hm
. Heightmap cells where the cross section is
projected are assigned as empty cells. After defining a
border heightmap, those cells in
hm
corresponding to
empty cells in the border heightmap must be labeled
as null links.
For each wall heightmap first the set of cells that
defines the height values is computed. Then the
heights are defined as a smooth noise.
Finally, to preserve continuity, border-inner and
inner-inner heightmaps links are established.
4 IMPLEMENTATION AND
RESULTS
The algorithms have been implemented on a Pen-
tium M 1.73 GHz, with 1GB RAM, nVidia Geforce
Go 6600 with 256 MB. The graphics API used was
OpenGL and the GLUT library was used for events
and window management. Digital elevation models
consisted of heightfields with 128x128 cells.
To test the model performance, we haveconducted
two sets of experiments that we briefly describe in
what follows. Related pictures and videos are avail-
able at (bib, ). The first set of experiments consisted
in applying a number of single events, erosion and
faults, on a given terrain. Each event was applied on
a fresh terrain. Figure 11 illustrates the results gener-
ated by a linear erosion.
The second set of experiments included a number
of overlapping events applied in sequence to a given
terrain yielding a complex model. Figure 12 shows
on the top the set of ground planes on which the ter-
rain is built and, on the bottom the resulting terrain as
wireframe.
As a proof of concept, we have developed a small
application to edit a fresh terrain by applying radial
erosion. Each erosion is defined as the result of crash-
ing a material particle on the terrain surface according
to a fixed erosion law. A movie can be downloaded
from (bib, ).
5 CONCLUSIONS
In this work we have proposed the Grounded
Heightmaps Tree (GHT) as a new terrain model
which is a generalization of heightmaps that over-
comes limitations inherent to them like capturing ter-
rain overhangs and carvings.
Besides, we have defined a set of operations to allow
editing the terrain. There are two families of opera-
tions: geotectonic events and carvings. The first fam-
ily has been designed to mimic geotectonic eventslike
linear and radial erosion; normal, inverse and lateral
faults. The second family includes carving tunnels
and caves.
We have conducted a series of experiments to test the
model and associated operations performance. Pre-
liminary results show that they are both effective and
efficient.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
84

Figure 11: Linear erosion. Left) Ground heightmap planes. Middle) 3D wireframe view. Right) 3D solid view.
Figure 12: Complex model. Top) Set of ground planes
in the final GHT. Bottom) Wire frame view after applying
some events.
ACKNOWLEDGEMENTS
This work has been partially funded by Ministerio
de Educaci´on y Ciencia and by FEDER under grant
TIN2004-06326-C03-01.
REFERENCES
The Grounded Heightmap Tree.
http://www.lsi.upc.edu/˜ jalonso/GHT.
Elias, H. http://freespace.virgin.net/hugo.elias.
Fault algorithm, T. http://www.lighthoused3d.com/opengl/terrain.
Klinkenberg, B. Digital elevation modeling.
http://www.geog.buffalo.edu/arcinfo/aiwwwtut/step3.html.
Martz, P. Generating random fractal terrain.
http://www.gameprogrammer.com/fractal.html.
Robot-frog. Terrain generation tutorial. http://www.robot-
frog.com/3d.
THE GROUNDED HEIGHTMAP TREE - A New Data Structure for Terrain Representation
85
