
A MODEL FOR WIRELESS SENSOR NETWORKS SUPPORTED
COOPERATIVE WORK
Lina M. Pestana Leão de Brito
1
and Laura M. Rodríguez Peralta
1, 2
1
Mathematics and Engineering Department, University of Madeira (UMa)
Campus da Penteada, 9000-390 Funchal, Madeira, Portugal
2
Centre for Informatics and Systems of the University of Coimbra (CISUC), Pólo II, 3030-290 Coimbra, Portugal
Keywords: Cooperative Work, Collaboration, Graph-based Model, Sensor Nodes, Wireless Sensor Networks.
Abstract: Collaboration is essential to Wireless Sensor Networks due to the typical resource limitations of the sensor
nodes. In fact, the main functions of the network cannot be accomplished without collaboration among
sensor nodes. Most of the work found in literature only focuses a specific type of collaboration, associated
with the accomplishment of a certain task, such as signal processing, computing, routing, etc. In this paper,
we present a graph-based model of cooperative work for WSNS. This model is called Wireless Sensor
Networks Supported Cooperative Work (WSNSCW) and considers the specific requirements of the WSNS.
1 INTRODUCTION
Combining the advantages of wireless
communications with some computational
capability, Wireless Sensor Networks (WSNS) allow
for a wide range of applications: environmental
monitoring, health, surveillance, traffic monitoring,
security, military, industry, agriculture, etc.
Nowadays, wireless sensor nodes are intended to
be small and cheap. Consequently, these nodes are
typically resource limited (Akyildiz et al., 2002)
They have reduced memory and limited processing
capacity. Battery is, also, restricted. Moreover, due
to short transmission range (caused by restrained
transmission power), nodes can only communicate
locally, with a certain number of local neighbours.
For these reasons, it is perfectly natural that nodes
need to collaborate among themselves in order to
accomplish their tasks. Collaboration enhances the
scalability of the network and facilitates mission
completion (Gracanin et al., 2006).
It is also worth mentioning that, according to
(Ramanathan et al., 2002), WSNS originated a new
collaboration concept. In traditional networks,
collaboration exists within the same group of nodes,
even though they move (node-centric collaboration).
In WSNs, collaboration occurs among nodes located
in a certain region, which means that the group of
nodes may not be the same (location-centric
collaboration). For instance, if a node leaves a
predefined region, it stops collaborating with other
nodes. However, besides localization-based
collaboration, it is possible to identify other ways to
collaborate, based whether in monitoring a certain
phenomenon or in the hardware characteristics of the
nodes themselves (Ranjan et al., 2005),(Medidi et
al., 2006), (Hussain et al., 2004), (Zhou et al., 2006).
At the moment, there are several works
concerning collaboration in WSNS. However, most
of them only focus a specific type of collaboration,
associated with the accomplishment of a certain task
(signal processing, routing, task scheduling, etc.).
Usually, these collaborations simply intend to
improve some parameters of the network (energy
costs, coverage, transmission costs, processing costs,
delay, etc.).
Until now, the only work that presents a model
for cooperative work in sensor networks has been
proposed by Liu et al. (Liu et al., 2006). This model
was created for sensor networks; however, it does
not consider the specific requirements of the WSNS.
In this paper, we present a graph-based model of
cooperative work for the specific case of the WSNS,
named Wireless Sensor Networks Supported
Cooperative Work (WSNSCW), which considers the
specific requirements of the WSNS. Our model
allows for not only the modelling of the cooperative
work, but also for the modelling of the entire WSN
and all its components.
505
M. Pestana Leão de Brito L. and M. Rodríguez Peralta L. (2008).
A MODEL FOR WIRELESS SENSOR NETWORKS SUPPORTED COOPERATIVE WORK.
In Proceedings of the Third International Conference on Computer Graphics Theory and Applications, pages 505-511
DOI: 10.5220/0001098705050511
Copyright
c
SciTePress

This paper is organized as follows. In section 2,
we briefly describe the related work. In section 3,
the model for WSNSCW is presented and
exemplified. Section 4 provides some conclusions
and perspectives of future work.
2 RELATED WORK
Most of the works concerning collaboration in
WSNS only focus a specific type of collaboration,
which is associated with the accomplishment of a
certain task, such as: sensing (Gracanin et al., 2006),
(Krohn et al., 2005), (Wang and Ramanathan, 2005),
(Reich, 2002), signal processing (Sheng and Yu,
2003), (Ramanathan et al., 2002), (Bergamo et al.,
2004), (Li and Yu, 2003), (Broxton et al., 2005),
(Asis and Kai, 2006), (D’Costa and Saveed, 2003),
(Wang and Wang, 2007), computing (Al-Omari and
Weisong, 2006), (Iftode et al., 2004), (Singh and
Prasanna, 2003), transmission (Yang et al., 2006),
(Krohn et al., 2006), (Krohn et al., 2006), (Yang and
Tong, 2005), (Yang and Tong, 2005), routing (Chen
et al., 2006), (Yang and Tong, 2005),(Fang et al.,
2004) localization (Sheng and Hu, 2003), (Reghelin
and Fröhlich, 2006), (Bergamo et al., 2004),
(Dardari and Conti, 2004), (Li and Hu, 2003),
(Broxton et al., 2005), security (Chadha et al., 2005),
task scheduling (Sanli et al., 2005), calibration
(Reghelin and Fröhlich, 2006), (Bychkovskiy et al.,
2003), heuristics (Reghelin and Fröhlich, 2006),
target tracking (Onel et al., 2006), (Wang and Wang,
2007), resource allocation (Giannecchini et al.,
2004), time synchronization (Hu and Servetto,
2005), knowledge building (for smart sensors) (Bove
and Mallet, 2004), etc. There are also works
concerning the collaboration between wireless
sensor nodes and other kind of devices
(heterogeneous groupware collaboration) to support
some specific applications (eg. collaboration
between sensor nodes and PDAs, in a fire fighting
scenario) (Cheng et al., 2004), (Chassot et al., 2006),
(Chaczko et al., 2005).
Until now, the only work that presents a model for
cooperative work in sensor networks has been
proposed by Liu et al. (Liu et al., 2006). It is the
SNSCW (Sensor Networks Supported Cooperative
Work) model.
The hierarchical SNSCW model divides the
cooperation in a sensor networks in two layers. The
first one relates to the cooperation between humans
and sensor nodes (user-executor relationship, being
initiated either by the user or by the sensor node),
and the other layer relates to the cooperation
between the sensor nodes (represented by an
activity-task-cooperation layered abstract model;
considering two main subtypes of cooperation: peer-
to-peer and master-to-slave).
This model was designed for sensor networks.
However, it does not consider the specific
requirements of the WSNs, for instance, its scale, its
auto-configuration requirements, the resource
limitations of wireless sensor nodes, etc (Akyildiz
and Su, 2002). Also, it only allows for modelling of
collaboration itself.
3 WSNSCW MODEL
In this paper, we present a model of cooperative
work for the specific case of WSNS, named
Wireless Sensor Networks Supported Cooperative
Work (WSNSCW). As WSNSCW is a model of
cooperative work created specifically to WSNS, it
considers the particular requirements of WSNS. It is
a graph-based model; nevertheless, it includes other
objects in order to make possible the modelling of
all the components of a WSN.
The SNSCW model, proposed in (Liu et al.,
2006), only focuses cooperation in WSNs, more
precisely, the different types of cooperation that can
occur in a WSN. Our model not only allows for the
modelling of cooperation within the network, but
also for the modelling of the entire WSN and all its
components (different types of nodes, clusters, base
stations, etc.). In what concerns to collaboration,
both the model and the example presented in this
paper only include the concepts of session and
relationships among nodes. However, we intend to
improve our model, including other concepts related
to CSCW (Computer Supported Cooperative Work)
(Vin and Rangan, 1992), (Mills, 2003).
WSNSCW is also a heterogeneous model, in the
sense that it can be applied to any type of wireless
sensor regardless its size, its hardware
characteristics, types of signals it can measure, etc. It
can also be applied to any WSN despite of the
specific application. However, in this paper we are
going to illustrate the use of this model, applying it
to the case of an environmental monitoring
application.
3.1 Definitions
In this section, the entities of our model are defined.
The entities are all the components than might exist
in a WSN. Table 1 shows the symbol, the concept
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
506
and the description of all the entities included in the
model.
A WSN can be composed by different types of
nodes: ordinary wireless sensor nodes (which can be
in one of two possible states, in order to save energy:
active or inactive – sleep mode), anchor nodes
(which support the other sensor nodes in the
localization process), one or more sink nodes (also
known by base stations, which are responsible for
sending data to the gateway) and a gateway
(responsible to send data to the user, through the
Internet). If nodes are grouped in clusters, one of the
cluster members become the cluster head; and all the
wireless sensor nodes have to send data to the cluster
head (usually, the more powerful node of the cluster,
responsible for sensing data to the sink node).
There is a relationship between nodes that
collaborate with each other. A relationship can be
established based on: localization of the nodes,
existence of clusters, phenomenon to monitor,
hardware characteristics of the sensor node, etc.
Associated with this relationship there is always an
exchange of data (data flow entity), which may be of
several different types (light, sound, temperature,
image, acceleration, etc.). It is also relevant to
identify the type of signal that was used by the
sensor node to collect this data (radio frequency,
ultrasound, acoustical or light).
There can be established several collaborative
sessions when monitoring a WSN, and they can exist
simultaneously or not. A session may be established
based on the objective of the WSN (type of
phenomenon to monitor, geographical area to
monitor, on monitoring time, etc.)
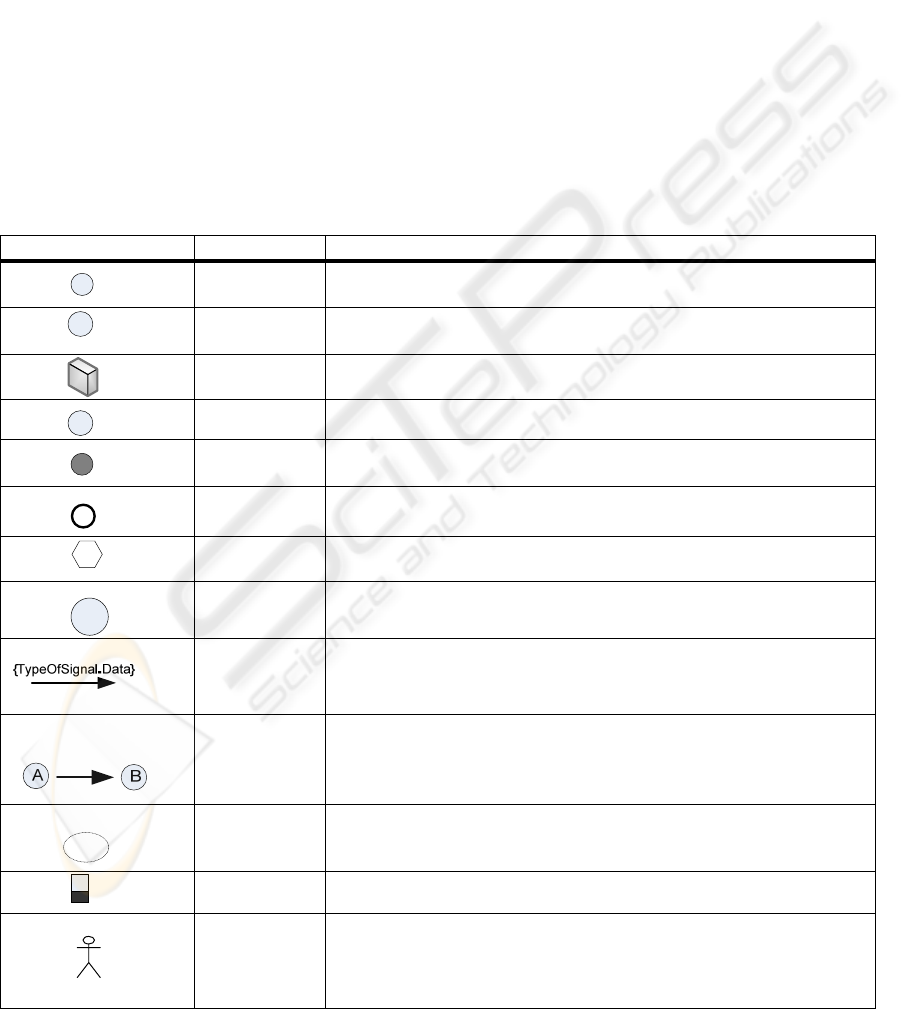
Table 1: Definition of the entities that can constitute a Wireless Sensor Network.
Symbol Concept Description
Sensor node
Wireless sensor nodes, typically with limited resources. They can be stationary or
mobile.
Sink node/
Base Station
Node to which data collected by ordinary nodes is sent; being responsible to send
data to the gateway.
Gateway
Node responsible to send the data to the user, through the Internet.
Anchor node
Node with known localization.
Active sensor
node
Node which is in the active state.
Inactive sensor
node
Node which is in the sleep mode, in order to save energy.
Cluster
Group of nodes, created according to: geographical area, type of sensor, type of
phenomenon, task, etc.
Cluster Head
Sensor node to whom all sensor nodes in the cluster send the collected data; it is
responsible for sending the received data to the Sink node.
Data flow
This label identifies both the type of signal being used (radio frequency,
ultrasound, acoustical or light) and the type of data being transmitted between
nodes (temperature, humidity, light, sound, video, internal voltage, etc.).
Relationship
The arrow represents a relationship between nodes A and B. Node A transmits
data to node B; so, node B consumes information from node A.
A relationship can be established based on: localization, phenomenon, type of
sensor node, etc.
Session
In a certain moment, there may be several collaborative sessions in a WSN. A
session can be established based on the objective (type of phenomenon to
monitor, geographical area to monitor) of the WSN.
Battery
It represents the remaining battery of the sensor node.
User
Person that interacts with the WSN, querying the network, visualizing data, etc.
The user customizes the work of the sensor nodes; the data collected by sensor
nodes is used by the users’ application.
A
S
CH
A MODEL FOR WIRELESS SENSOR NETWORKS SUPPORTED COOPERATIVE WORK
507

As the battery is the most critical resource of a
sensor node, it is really important that the user
knows the state of the battery of each sensor. That is
why the battery is also an entity of our model.
Finally, the user is the entity who interacts with the
WSN, defining the application, querying the
network, visualizing data, customizing the work of
the sensor nodes, etc.
3.2 Example Scenario
In this section, we exemplify the use of our model,
by applying it to the specific case of an
environmental monitoring application.
Let’s consider a forest monitoring WSN with a
total of 45 nodes. Among these nodes there are 3
sink nodes, 5 anchor nodes and 37 wireless sensor
nodes. The nodes were deployed in an ad hoc
manner, in two different geographical areas of a
forest.
The user works in a place, which is far away
from the forest being monitored. So, he monitors the
WSN through the Internet. As shown in Fig. 1, in
this example there are three simultaneous
collaborative sessions. These sessions where
initiated by the user, after he defined three different
objectives: to monitor the temperature of area A1
(session CS1), to monitor the humidity of area A2
(session CS2), and to monitor the light of the same
area (session CS3).
Within each area, clusters have been created
according to the geographical localization of sensor
nodes, being based in the proximity between nodes.
The cluster head was chosen, among nodes in the
cluster, as the node with more battery. In this case, 5
clusters have been created and, hence, there are 5
cluster heads. The nodes in the cluster automatically
start to collaborate to collect data and send it to the
cluster head. Also, the cluster head starts sending
data to the sink node, which, in turn, send it to the
user, through the gateway. Only the nodes of the
cluster need to be in the active state, as they need to
monitor the phenomenon and also need to send the
data to the cluster head. The remaining nodes are in
the sleep mode, in order to save energy. Nodes can
also become inactive if their batteries end.
As this scenario relates to an environmental
monitoring application, it is very important to be
able to correlate collected data in time. So, anchor
nodes had to be deployed in the WSN. As the
localization of anchor nodes is known, they can help
the cluster heads (as well as the remaining nodes of
the cluster, if needed) in determining their own
position.
As the battery is the most critical resource of a
sensor node, it is really important that the user
knows the state of the battery of each node. This
way, the user gets to know when he has to go to the
field in order to change the batteries of the sensor
nodes.
Any changes that might occur on this scenario
(new collaborative sessions, new clusters, nodes
changing from sleep mode to the active state or vice
versa, etc.) can be represented by a succession of
figures analogous to Fig. 1.
Figure 1: Applying the WSNSCW model to a WSN,
considering the specific case of forest environmental
monitoring.
Figure 2: Screenshots of the implementation of the web-
based 2D visualization tool.
Fig. 2 shows a prototype of a web-based
visualization tool. This tool was created to visualize
some of the components of a forest environmental
monitoring WSN. At the moment, it only shows one
type of nodes and one of the parameters they can
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
508

measure (temperature, noise, acceleration,
magnetism, light and the battery level), at a time
(according to the user selection). However, this tool
should be based in the WSNSCW model.
Consequently, it should show all the entities defined
in the model: different types of nodes, relationships
between them, different clusters, data flows, etc.
In this initial phase, it is still a 2D visualization
tool. However, we intend to develop it into a 3D
visualization tool, since it is more appropriated for
representing a WSN deployed in different types of
terrains. In the specific a forest environment, for
instance, we can have different types of terrains
(flat, mountainous, etc.), which might interfere with
the collaboration established between nodes.
4 CONCLUSIONS
AND FUTURE WORK
WSNSCW is a model of cooperative work
specifically designed to WSNs. It is a graph-based
model that can be applied to a heterogeneous
network, in the sense that it can be applied to any
type of sensors and any type of application. The
great advantage of this model lies in the fact that,
besides modelling the cooperation of the network, it
also allows for modelling the whole network and all
its components. In this paper, we applied this model
to the specific case of a forest environmental
monitoring application.
In the near future, we intend to include more
concepts of CSCW in the WSNSCW model. We
also intend to formalize this model using graph
theory as well as to use the model to create a web-
based visualization tool for WSNs in a 3D
environment. As in a forest environment, we can
have different types of terrains (flat, mountainous,
etc.), it is important that the visualization tool allows
for the 3D visualisation of the whole network,
including all its components, as they are the
deployed in the forest terrain. For instance, it will be
possible to visualize all the nodes in their real
position, and also where they are deployed
considering all the terrain irregularities and obstacles
that might exist. This will lead to a more realistic
view of the network.
REFERENCES
Akyildiz, I., Su, W., Sankarasubramaniam, Y., Cayirci, E.,
“A Survey on Sensor Networks”, IEEE
Communications Magazine, Aug. 2002, pp. 102-109.
Ranjan, G., Kumar, A., Rammurthy, G., Srinivas, M., “A
Natural Disasters Management System Based on
Location Aware Distributed Sensor Networks”, IEEE
International Conference on Mobile Ad hoc and
Sensor Systems (MASS 2005), 2005.
Medidi, M., Slaaen, R., Zhou, Y., Mallery, C., Medidi, S.,
“Cluster-based Localization in Wireless Sensor
Networks”, in Proc. of the SPIE, Wireless Sensing and
Processing, Raghuveer M. Rao, Sohail A. Dianat,
Michael D. Zoltowski., Editors, Volume 6248,
62480J, May 2006.
Liu, L., Ma, H., Tao, D., Zhang, D., “A Hierarchical
Cooperation Model for Sensor Networks Supported
Cooperative Work”, in Proc. of 10th International
Conference on Computer Supported Cooperative
Work in Design (CSCWD’06), May 2006, pp. 1-6.
Hussain, S., Farooq, U., Zia, K., Akhlaq, M., “An
Extended Topology for Zone-Based Location Aware
Dynamic Sensor Networks”, in Proc. of National
Conference on Emerging Technologies (NCET 2004),
Szabist Karachi, Pakistan, Dec 18-19, 2004.
Cheng, L., Lian, T., Zhang, Y., Ye, Q., “Monitoring
Wireless Sensor Networks by Heterogeneous
Collaborative Groupware”, Sensors for Industry
Conference (Sicon/04), New Orleans, Louisiana, USA,
27-29 January 2004.
Chassot, C., Drira, K., Armando, F., Exposito, E., Lozes,
A., “A Model-Based Coordinated Adaptability
Framework for QoS Management in Cooperative
Mobile and Wireless Applications”, in Proc. of 9th
ACM International Workshop on Modeling Analysis
and Simulation of Wireless and Mobile Systems and
Simulation of Wireless and Mobile Systems
MSWiM’06, Torremolinos, Malaga, Spain, Portugal,
Oct. 2006, pp. 118 – 125.
Sheng, X., Hu, Y., “Collaborative Source Localization in
Wireless Sensor Network System”, IEEE Globecom,
2003.
Ramanathan, P., Saluja, k., Hu, Y., “Collaborative Sensor
Signal Processing for Target Detection, Localization
and Tracking”, in Proc. of 23rd Army Science
Conference, Dec. 2002.
Reghelin, R., Fröhlich, A., “A Decentralized Location
System for Sensor Networks Using Cooperative
Calibration and Heuristics”, in Proc. of 9th ACM
international symposium on Modelling Analysis and
Simulation of Wireless and Mobile Systems
(MSWiM’06), Torremolinos, Spain, 2006, pp. 139-146.
Bergamo, P., Asgari, S., Wang, H., Maniezzo, D., Yip, L.,
Hudson, R., Yao, K., Estrin, D., “Collaborative Sensor
Networking Towards Real-Time Acoustical
Beamforming in Free-Space and Limited
Reverberance”, IEEE Transactions on Mobile
Computing, vol. 3, no. 3, July-Sept. 2004.
Gracanin, D., Adams, K., Eltoweissy, M., “Data
Replication in Collaborative Sensor Network
Systems”, in Proc. 25th IEEE International
Performance, Computing, and Communications
Conference (IPCCC 2006), 10-12 April 2006, pp. 389-396.
A MODEL FOR WIRELESS SENSOR NETWORKS SUPPORTED COOPERATIVE WORK
509

Yang, S., Cardei, M., Wu, J., “Topology Control in Ad
Hoc Wireless Networks using Cooperative
Communication”, IEEE Transactions on Mobile
Computing, Vol. 5, No. 6, June 2006, pp. 711-724.
Chen, G., Guo, T.-D., Yang, W.-G., Zhao, T., “An
improved ant-based routing protocol in Wireless
Sensor Networks”, International Conference on
Collaborative Computing: Networking, Applications
and Worksharing (CollaborateCom 2006), Nov. 2006,
pp. 1-7.
Al-Omari, S., Weisong, S., “Redundancy-Aware
Topology Management in Wireless Sensor Networks”,
International Conference on Collaborative Computing:
Networking, Applications and Worksharing
(CollaborateCom 2006), Nov. 2006, pp. 1-10.
Krohn, A., Beigl, M., Decker, C., Riedel, T., Zimmer, T.,
Varona, D., “Increasing Connectivity in Wireless
Sensor Network using Cooperative Transmission”, 3rd
International Conference on Networked Sensing
Systems (INSS), Chicago, USA, May 31 – June 2,
2006.
Bove, V., Mallet, J., “Collaborative Knowledge Building
by Smart Sensors”, BT Technology Journal, Vol. 22,
No. 4, October 2004, pp. 45-51.
Dardari, D., Conti, A., “A Sub-Optimal Hierarchical
Maximum Likelihood Algorithm for Collaborative
Localization in Ad-Hoc Networks”, 1st Annual IEEE
Communications Society Conference on Sensor and
Ad Hoc Communications and Networks (IEEE
SECON 2004), Oct. 2004, pp. 425- 429.
Iftode, L., Borcea, C., Kang, P., Cooperative Computing
in Sensor Networks, Handbook of Sensor Networks:
Compact Wireless and Wired Sensing Systems,
Mohammad Ilyas (ed.), CRC Press, July 2004.
Krohn, A., Zimmer, T., Beigl, M., Decker, C.,
“Collaborative Sensing in a Retail Store Using
Synchronous Jam Signalling”, 3rd International
Conference on Pervasive Computing, Munich,
Germany, May 2005.
Wang, K.-C., Ramanathan, P., “Collaborative Sensing
Using Sensors of Uncoordinated Mobility”,
International Conference on Distributed Computing in
Sensor Systems (Lecture Notes in Computer Science),
Marina del Rey, USA, June 2005, pp. 293-306.
Onel, T., Ersoy, C., Deliç, H., “Information Content-Based
Sensor Selection for Collaborative Target Tracking”,
in Proc. of the 14th European Signal Processing
Conference, Florence, Italy, September 2006.
Li, D., Hu, Y., “Energy Based Collaborative Source
Localization Using Acoustic Micro-Sensor Array”, in
J. EUROSIP Applied Signal Processing, vol. 2003, no.
4, 2003, pp. 321-337.
Krohn, A., Beigl, M., Decker, C., Riedel, T., Zimmer, T.,
“The implementation of Non-Coherent Cooperative
Transmission for Wireless Sensor Networks”,
Pervasive 2006, February, Dublin, Ireland.
Broxton, M., Lifton, J., Paradiso, J., “Localizing a Sensor
Network via Collaborative Processing of Global
Stimuli”, in Proc. of the 2nd European Workshop on
Wireless Sensor Networks, 31 Jan.- 2 Feb. 2005, pp.
321-332.
Yang, Z., Tong, L., “Cooperative sensor networks with
misinformed nodes”, IEEE Transactions on
Information Theory, vol. 51, no. 12, Dec. 2005, pp.
4118 – 4133.
Yang, Z., Tong, L., “Capacity of cooperative sensor
networks with sensor errors”, IEEE International
Conference on Communications (ICC 2005), vol. 2,
May 2005, pp. 742 – 746.
Hu, A., Servetto, S., “Algorithmic Aspects of the Time
Synchronization Problem in Large-Scale Sensor
Networks", Mobile Networks and Applications, 10,
2005 Springer Science + Business Media Inc., 2005,
pp. 491-503.
Reich, J., “Collaborative sensing and in-network
processing of sensor network data”, IEEE CAS
Wireless Networking Workshop, September 2002,
Pasadena, CA, USA.
Vin, H., Rangan, P., “System Support for Computer
Mediated Multimedia Collaborations”, in Proc. ACM
Conference on Computer Supported Cooperative
Work (CSCW’92), Toronto, Canada, pp. 203-209,
Nov. 1992.
Mills, K., “Computer-Supported Cooperative Work
Challenges“, Encyclopedia of Library and Information
Science, 2003.
Chadha, A., Liu, Y., Das, S., “Group Key Distribution via
Local Collaboration in Wireless Sensor Networks”,
2nd Annual IEEE Communications Society
Conference on Sensor and Ad Hoc Communications
and Networks (SECON 2005), Santa Clara, California,
USA, September 2005.
Bychkovskiy, V., Megerian, S., Estrin, D., Potkonjak, M.,
“A Collaborative Approach to In-Place Sensor
Calibration”, 2nd International Workshop on
Information Processing in Sensor Networks
(IPSN’03), April 2003.
Sanli, H., Poornachandran, R., Cam, H., “Collaborative
Two-Level Task Schedulling for Wireless Sensor
Nodes”, in Proc. of IEEE Communications Society
Conference on Sensor and Ad Hoc Communications
and Networks (SECON 2005), Santa Clara, USA,
September 2005.
Asis Nasipuri, Kai Li, “Multisensor Collaboration in
Wireless Sensor Networks for Detection of Spatially
Correlated Signals”, International Journal of Mobile
Network Design and Innovation (IJMNDI), vol. 1, no.
3/4, 2006, pp. 215-223.
D’Costa, A., Sayeed, A., “Collaborative Signal Processing
for Distributed Classification in Sensor Networks”,
2nd International Workshop on Information
Processing in Sensor Networks (IPSN’03), April 2003.
Wang, X., Wang, S., “Collaborative signal processing for
target tracking in distributed wireless sensor
networks”, Journal of Parallel and Distributed
Computing, vol. 67, no. 5, May 2007, pp. 501-515.
Singh, M., Prasanna, V., “A Hierarchical Model for
Distributed Collaborative Computation in Wireless
Sensor Networks”, International Parallel and
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
510

Distributed Processing Symposium (IPDPS’03), April
2003.
Chaczko, Z., Ahmad, F., Mahadevan, V., “Wireless
Sensors in Network Based Collaborative
Environments”, 6th International Conference on
Information Technology Based Higher Education and
Training (ITHET 2005), July 2005, pp. F3A-7- F3A-13.
Giannecchini, S., Caccamo, M., Shih, C.-S.,
“Collaborative resource allocation in wireless sensor
networks”, in Proc. of Euromicro Conference on Real-
Time Systems (ECRTS’04), June/July 2004, pp. 35–44.
Fang, Q., Liu, J., Guibas, L., Zhao, F., “RoamHBA:
Maintaining Group Connectivity in Sensor Networks”,
3rd International Conference on Information
Processing in Sensor Networks (IPSN’04), Berkeley,
CA, USA, April, 2004.
Zhou, Z., Cui, J.-H., Zhou, S., “Localization for Large-
Scale Underwater Sensor Networks”, UCONN CSE
Technical Report: UbiNet-TR06-04, December 2006.
A MODEL FOR WIRELESS SENSOR NETWORKS SUPPORTED COOPERATIVE WORK
511
