
SYNCHRONIZATION OF ARM AND HAND ASSISTIVE
ROBOTIC DEVICES TO IMPART ACTIVITIES OF DAILY
LIVING TASKS
Duygun Erol
1
and Nilanjan Sarkar
2
1
Department of Electrical & Electronics Engineering, Yeditepe University, Kayisdagi, Istanbul, Turkey
2
Department of Mechanical Engineering, Vanderbilt University, Nashville, TN, U.S.A.
Keywords: Robot-assisted rehabilitation, robot-assisted rehabilitation for activities of daily living tasks, coordination of
arm and hand assistive devices, hybrid system model.
Abstract: Recent research in rehabilitation indicates that tasks that focus on activities of daily living (ADL) is likely to
show significant increase in motor recovery after stroke. Most ADL tasks require patients to coordinate their
arm and hand movements to complete ADL tasks. This paper presents a new control approach for robot
assisted rehabilitation of stroke patients that enables them to perform ADL tasks by providing controlled
and coordinated assistance to both arm and hand movements. The control architecture uses hybrid system
modelling technique which consists of a high-level controller for decision-making and two low-level
assistive controllers (arm and hand controllers) for arm and hand motion assistance. The presented
controller is implemented on a test-bed and the results of this implementation are presented to demonstrate
the feasibility of the proposed control architecture.
1 INTRODUCTION
Stroke is leading cause a disability that results in
high costs to the individual and society (Matchar,
1994). Literature supports the idea of using intense
and task oriented stroke rehabilitation (Cauraugh,
2005) and creating highly functional and task-
oriented practice environments (Wood, 2003) that
increase task engagement to promote motor
learning, cerebral reorganization and recovery after
stroke. The task-oriented approaches assume that
control of movement is organized around goal-
directed functional tasks and demonstrated
promising results in producing a large transfer of
increased limb use to the activities of daily living
(ADL) (Ada, 1994). The availability of such training
techniques, however, is limited by the amount of
costly therapist’s time they involve and the ability of
the therapist to provide controlled, quantifiable and
repeatable assistance to movement. Consequently,
robot-assisted rehabilitation that can quantitatively
monitor and adapt to patient progress, and ensure
consistency during rehabilitation has become an
active research area to provide a solution to these
problems.
MIT-Manus (Krebs, 2004), MIME (Lum,
2006), ARM-Guide (Kahn, 2006) and the
GENTLE/s (Loureiro, 2003) are the devices
developed for arm rehabilitation, whereas Rutgers
Master II-ND (Jack, 2001), the CyberGrasp
(Immersion Corporation), a pneumatically
controlled glove (Kline, 2005) and HWARD
(Takahashi, 2005) are used for hand rehabilitation.
Even though existing arm and hand
rehabilitation systems have shown promise of
clinical utility, they are limited by their inability to
simultaneously assist both arm and hand
movements. This limitation is critical because the
stroke therapy literature supports the idea that the
ADL-focused tasks (emphasis on task-oriented
training), which engage patients to perform the tasks
in enriched environments have shown significant
increase in the motor recovery after stroke. Robots
that cannot simultaneously assist both arm and hand
movements are of limited value in the ADL-focused
task-oriented therapy approach. It is possible to
integrate an arm assistive device and a hand assistive
device to provide the necessary motion for ADL-
focused task-oriented therapy. However, none of the
existing controllers used for robot-assisted
rehabilitation can be directly used for this purpose
because they are not suited for controlling multiple
systems in a coordinated manner. In this work, we
address the controller design issue of a robot-
assisted rehabilitation system that can
simultaneously coordinate both arm and hand
5
Erol D. and Sarkar N. (2008).
SYNCHRONIZATION OF ARM AND HAND ASSISTIVE ROBOTIC DEVICES TO IMPART ACTIVITIES OF DAILY LIVING TASKS.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - ICSO, pages 5-12
DOI: 10.5220/0001476700050012
Copyright
c
SciTePress
motion to perform ADL tasks using an intelligent
control architecture. The proposed control
architecture uses hybrid system modeling technique
that consists of a high-level controller and two low-
level device controllers (e.g., arm and hand
controllers). The versatility of the proposed control
architecture is demonstrated on a test-bed consisting
of an upper arm assistive device and a hand assistive
device. Note that the presented control architecture
is not specific to a given arm and hand assistive
device but can be integrated with other previously
proposed assistive systems.
In this paper, we first present the intelligent
control architecture in Section 2, and then the
rehabilitation robotic system and design details of
the high-level controller are presented in Section 3.
Later, results of the experiments to demonstrate the
efficacy of the proposed controller architecture are
presented in Section 4. Finally, the contributions of
the work are presented in Section 5.
2 INTELLIGENT CONTROL
ARCHITECTURE
Let us first present the proposed intelligent control
architecture in the context of generic ADL tasks that
require coordination of both arm and hand
movement (e.g., eating, drinking, etc.). Stroke
patients may not be able to complete the ADL tasks
by themselves because of motor impairments. Thus,
low-level arm assistive controller and low-level
hand assistive controller may be used to provide
assistance to the subject’s arm and hand movement,
respectively. The nature of assistance given to the
patients and coordination of the assistive devices,
however, could be impacted by various events
during the ADL task (e.g., completion of a subtask,
safety related events etc.). A high-level controller
(HLC) may be used to allocate task responsibility
between the low-level assistive controllers (LLACs)
based on the task requirements and specific events
that may arise during the task performance. HLC
plays the role of a human supervisor (therapist) who
would otherwise monitor the task, assess whether
the task needs to be updated and determine the
activation of the assistive devices. However, in
general, the HLC and the LLACs may not
communicate directly because each may operate in
different domains. While the LLACs may operate in
a continuous way, the HLC may need to make
intermittent decisions in a discrete manner. Hybrid
system theory provides mathematical tools that can
accommodate both continuous and discrete systems
in a unified manner. Thus, we take advantage of
using a hybrid system model to design the proposed
intelligent control architecture (Koutsoukos, 2000).
In this architecture, the “Plant” represents both the
assistive devices and their low-level assistive
controllers and the Interface functions as analog-to-
digital/digital-to-analog (AD/DA) adaptor.
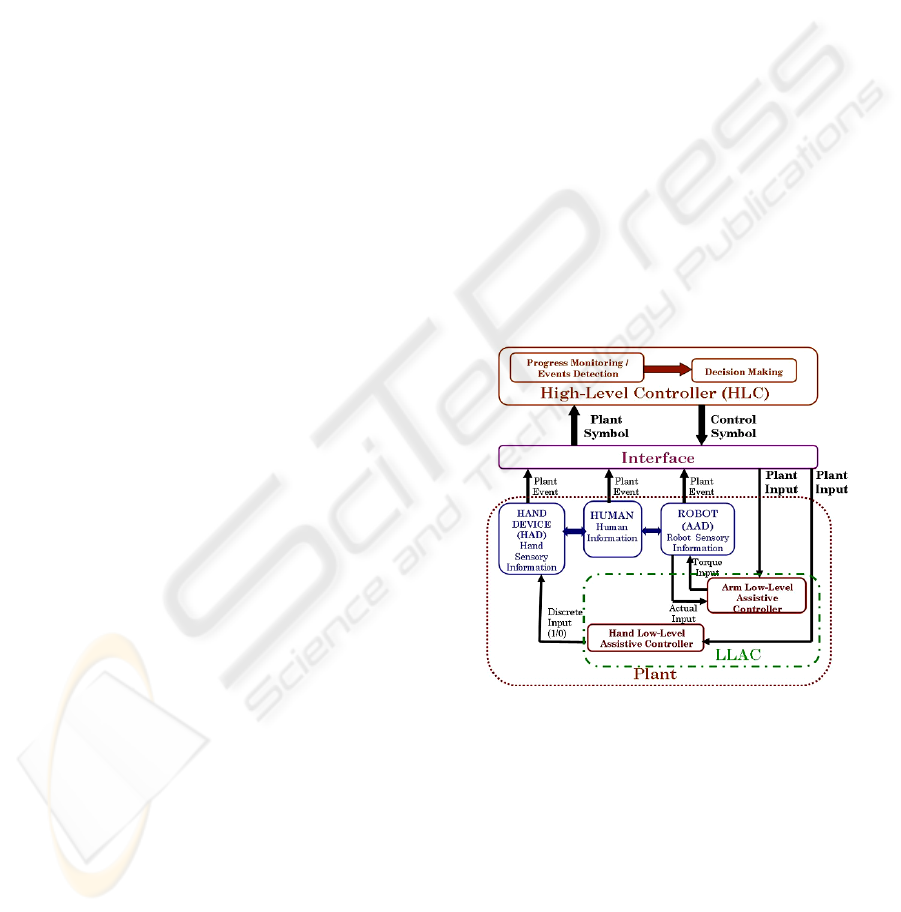
The proposed control architecture for robot-
assisted rehabilitation to be used to perform ADL
tasks is presented in Fig. 1. In this architecture, the
sensory information from the arm assistive device,
the hand assistive device and the feedback from the
human are monitored by the process-monitoring
module through the interface. The sensory
information (plant event) is converted to a plant
symbol so that the HLC can recognize the event.
Based on a plant symbol, the decision making
module of the HLC sends its decision to the LLACs
through the interface using the control symbols.
Interface converts the control symbols to the plant
inputs which are used to activate/deactivate the
LLACs to complete the ADL task. The proposed
control architecture is extendible in the sense that
new events can be included by simply monitoring
the new sensory information from the human and the
assistive devices, and accommodated by introducing
new decision rules.
Figure 1: Control Architecture.
3 METHODOLOGY
The primary focus of this paper is to demonstrate
how the assistive devices can be coordinated using
the proposed intelligent control framework for a
given ADL task. The intelligent control framework
consists of a HLC and two low-level arm and hand
assistive controllers. The focus of the paper is to
design of HLC that can coordinate a number of
given LLACs using the presented intelligent control
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
6

framework. First we briefly present the rehabilitation
system used as the test-bed to implement the
intelligent control framework. We then present a
detailed discussion on the design and
implementation of the HLC and its workings within
the presented control framework using an ADL task.
3.1 Rehabilitation Robotic System -
a Test Bed
The rehabilitation robotic system used in this work
consists of an arm assistive device, hand assistive
device and two sensory systems (contact detection
and proximity detection systems) (Fig. 2A). We
have modified a Power Grip Assisted Grasp Wrist-
Hand Orthosis (Broadened Horizons) as a hand
assistive device (Fig. 2B). A computer control
capability in a Matlab/Realtime Windows Target
environment is added in order to integrate the hand
device in the proposed control architecture. The
subject is asked to follow the opening/closing speed
of the hand device and if the subject cannot follow
the hand device movement, then the hand device
provides assistance to complement subject’s effort to
open/close his/her hand. The PUMA 560 robotic
manipulator is augmented with a force-torque sensor
and a hand attachment device (Fig.2A) to provide
assistance to the upper arm movement (Erol, 2007).
A proportional-integral-derivative (PID) position
control is used as a low-level arm assistive controller
for providing robotic assistance to a subject. The
subject is asked to pay attention to tracking the
desired position trajectory (visually monitoring
his/her actual and desired position trajectories on a
computer screen) as accurately as possible. If the
subject deviates from the desired motion, then the
low-level arm assistive controller provides robotic
assistance to complement the subject’s effort to
complete the task as required. We have designed a
contact detection system to provide sensory
information about grasping activity that may be a
part of an ADL task of interest. The force-sensitive
resistors (FSR) (Interlink Electronics, Inc.) are
placed on the fingertip to estimate the forces applied
on the object during the grasping task (Fig. 2C).
When the subject starts grasping an object, then the
voltage across the FSR changes as a function of the
applied force. Additionally, a proximity detection
system (PDS) is designed in order to detect the
closeness of the subject’s hand relative to the object
to be grasped. The PDS contains a phototransistor
(sensitive to infrared light) and an infrared emitter,
which are mounted onto two slender posts close to
the object facing each other. When the subject
approaches to the object by moving his/her hand
between these posts, the continuity of the receiving
signal (infrared beam) is broken and the
corresponding voltage change is used to generate an
event to inform the HLC that the subject is close to
the object.
Figure 2A: Rehabilitation Robotic System, Figure 2B:
Hand Assistive Device and Figure 2C: Force Sensor
Resistors Placement on the Fingers.
3.2 Task Description
The main focus of this work is to present how a
HLC is designed and how it functions within the
proposed intelligent control architecture. The ADL
tasks consist of several primitive movements such as
reaching towards an object, grasping the object,
lifting the object from the table, using the object for
eating/drinking, and placing the object back on the
table (Murphy, 2006) and they all require
coordination between arm and hand movements. In
here, we choose one of the ADL tasks, called
drinking from a bottle (DFB) task to explain the
HLC. We decompose the DFB task into the
following primitive movements: i) reach towards the
bottle while opening the hand, ii) reach the bottle,
iii) close the hand to grasp the bottle, iv) move the
bottle towards the mouth, v) drink from a bottle
using a straw, vi) place the bottle back on the table,
vii) open the hand to leave the bottle back on the
table and viii) go back to the starting position. Note
that similar task decomposition could be defined for
other ADL tasks.
3.3 Design Details of the High-Level
Controller
3.3.1 Theory of Hybrid Control Systems
The hybrid control systems consist of a plant which
is generally a continuous system to be controlled by
a discrete event controller (DES) connected to the
plant via an interface in a feedback configuration
(Koutsoukos, 2000). If the plant is taken together
with the interface, then it is called a DES plant
SYNCHRONIZATION OF ARM AND HAND ASSISTIVE ROBOTIC DEVICES TO IMPART ACTIVITIES OF DAILY
LIVING TASKS
7

model. The DES plant model is is a nondeterministic
automaton which is represented by
G ( P,X ,R, , )
ψ
λ
=
. Here
P
is the set of discrete
states;
X
is the set of plant symbols generated
based on the events; and
R
is the set of control
symbols.
P
:P R 2
ψ
×→
is the state transition
function. For a given DES plant state and a given
control symbol, state transition function is defined as
the mapping from
P
R×
to the power set
P
2
, since
for a given plant state and a control symbol the next
state is not uniquely defined. The output
function,
X
:P P 2
λ
×→
, maps the previous and
current plant states to a set of plant symbols. The
DES controller, which is called the HLC in this
work, controls the DES plant. The HLC is
responsible to coordinate the assistive devices based
on both task and the safety requirements. The HLC
is modeled as a discrete-event system (DES)
deterministic finite automaton, which is specified
by
D
(S,X,R, , )
δ
φ
=
. Here
S
is the set of control
states. Each event is converted to a plant symbol,
where
X
is the set of such symbols, for all discrete
states. The next discrete state is activated based on
the current discrete state and the associated plant
symbol using the following transition
function:
:S X S
δ
×→
. In order to notify the LLACs
the next course of action in the new discrete state,
the HLC generates a set of symbols, called control
symbols, denoted by
R
, using an output
function:
:S R
φ
→
.
3.3.2 Modelling of an ADL Task using
Hybrid Control System
Now we discuss how the above theory could be used
to model and control an ADL task (e.g., the DFB
task) for rehabilitation therapy. The first step is to
design the DES plant and define the hypersurfaces
that separates different discrete states. The
hypersurfaces are used to detect the events and are
decided considering the capabilities of the
rehabilitation robotic systems and the requirements
of the task. The following hypersurfaces are defined:
hvir0,h xx
t
12
−∈=> =≥
,
(
)
(
)
h vfsr vth hcb 0
3
=<∧==
,
()
hxx (hob0),
t
4
−∈=≤ ∧ ==
(
)
htt
5
hand
===
,
h,
u
6
l
θ
θθ
=<<
h
r
7
rth
ττ
=≥
,
h
8
hhth
ττ
=≥
,
()
heb1
9
===
,
(
)
hpb1
10
===
(
)
(
)
hpb0eb0
11
===∧==
, where vir is the voltage in
the PDS system.
x
and
x
t
are the hand actual
position and the object’s position, respectively.
∈
is
a value used to determine if the subject is close
enough to the object’s position.
vfsr and vth are the
voltage across the FSRs and the threshold voltage,
respectively. The values of
hob and hcb are binary
values, which could be 1 when it is pressed and 0
when it is released.
t and
t
hand
are the current time
and the final time to complete hand opening,
respectively.
l
θ
and
u
θ
represent the set of lower and
upper limits of the joint angles, respectively and
θ
is
the set of the actual joint angles.
r
τ
and
rth
τ
are the
torque applied to the motor of the arm assistive
device and the torque threshold value, respectively.
The torque applied to the motor of the hand assistive
device and its threshold value is defined as
h
τ
and
hth
τ
, respectively. The values of eb and
p
b are
binary values, which could be 1 when it is pressed
and 0 when it is released. The above hypersurfaces
can be classified into two groups: i) the
hypersurfaces that are defined considering the
requirements of the tasks (i.e.,
h
1
-
5
h
), and ii) the
hypersurfaces that are defined considering the
capabilities of the rehabilitation robotic system (i.e.,
6
h
-
h
11
). The hypersurfaces provide information to
the HLC in order to make decisions for execution of
the task in a safe manner. The set of DES plant
states
P
is based upon the set of hypersurfaces
realized in the interface. Each region in the state
space of the plant, bounded by the hypersurfaces, is
associated with a state of the DES plant. During the
execution of the task, the state evolves over time and
the state trajectory enters a different region of the
state space by crossing the hypersurfaces and a plant
event, occurs when a hypersurface is crossed. A
plant event generates a plant symbol to be used by
the HLC. The plant symbols
X
in the DES plant
model
G ( P, X ,R, , )
ψ
λ
=
are defined as follows:
x
[n] ( p[n 1],p[n])
λ
=
−
(1)
where
x
X∈
,
pP
∈
,
λ
is the output function and n
is the time index that specifies the order of the
symbols in the sequence. In (1) the plant symbol,
x
,
is generated as an output function of the current and
the previous plant state. We define the following
plant symbols considering the hypersurfaces
discussed before: i)
x
1
, the arm approaches to the
bottle with the desired grip aperture, which is
generated when
h
1
is crossed, ii)
x
2
, the arm reaches
to the bottle, which is generated when
h
2
is crossed,
iii)
x
3
, the hand reaches desired grip closure to
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
8

grasp the bottle, which is generated when
3
h
is
crossed, iv)
x
4
, the arm leaves the bottle on the table,
which is generated when
h
4
is crossed, v)
5
x
, the
hand reaches desired grip aperture, which is
generated when
5
h
is crossed, vi)
x
6
, safety related
issues happened such as the robot joint angles are
out of limits (when
h
6
is crossed), or the robot
applied torque is above its threshold (when
h
7
is
crossed), or hand device applied torque is above its
threshold (when
h
8
is crossed) or emergency button
is pressed (when
h
9
is crossed), vii)
x
7
, the subject
presses the pause button, which is generated when
h
10
is crossed, and viii)
x
8
, the subject releases the
pause button which is generated when
h
11
is crossed.
X
=
{
}
x
,x ,x ,x ,x ,x ,x ,x
45 7
123 6 8
is the set of plant
symbols.
In this work, the purpose of the DES controller
(HLC) is to activate/deactivate the assistive devices
in a coordinated manner to complete the DFB task.
In order to perform this coordination, the following
control states are defined:
s
1
: both the hand device
and arm device are active, ii)
s
2
: the arm device
alone is active, iii)
s
3
: the hand device alone is
active to close the hand, iv)
s
4
: the hand device
alone is active to open the hand, v)
s
5
: both the arm
and hand devices are idle. Additionally, a memory
control state (
s
6
) is defined to detect the previous
control actions when the subject wants to continue
with the task after he/she presses pause button.
{
}
S s ,s ,s ,s ,s ,s
123456
=
is the set of control states in
this application. When new control actions are
required for an ADL task, new control states can be
included in the set of the states,
S
. The transition
function
:S X S
δ
×→
uses the current control state
and the plant symbol to determine the next control
action that is required to update the ADL task, where
s
S∈
,
x
X∈
,
rR∈
, and n is the time index that
specifies the order of the symbols in the sequence.
s
[n] (s[n 1],x[n])
δ
=−
(2)
The HLC generates a control symbol
r
, which is
unique for each state,
s
as given in (3). In here, the
following control symbols are defined: i)
r
1
: drive
arm device towards the object while driving hand
device to open the hand, ii)
r
2
: drive arm device to
perform various primitive arm motion such as move
the bottle towards the mouth etc., iii)
r
3
: drive hand
device to close the hand to grasp the bottle, iv)
r
4
:
drive hand device to open the hand to leave the
bottle, and v)
r
5
: make arm and hand devices idle.
The set of control symbols are defined as
{
}
R r ,r ,r ,r ,r
12345
=
.
r[n] (s[n])
φ
=
(3)
The LLACs cannot interpret the control symbols
directly. Thus the interface converts the control
symbols into continuous outputs, which are called
plant inputs. The plant inputs are then sent to the
LLACs to modify the ADL task. We define the
following plant inputs: i) if
rr
1
=
then provide 1 to
activate both arm and hand devices, ii) if
rr
2
=
, then
provide 2 to activate only the arm device, iii) if
rr
3
=
, then provide 3 to activate only the hand
device to close hand, iv) if
rr
4
=
, then provide 4 to
activate only the hand device to open hand, v) if
rr
5
=
, then provide 0 to keep both arm and hand
devices idle. Note that the design of the elements of
the DES plant and the DES controller is not unique
and is dependent on the task and the sensory
information available from the robotic system.
4 RESULTS
In this section we present two experiments that were
conducted to demonstrate the feasibility and
usefulness of the proposed control architecture.
Since we experiment with an unimpaired subject
who could ideally do the DFB task by himself
(unlike a real stroke patient) we instructed him to be
passive so that we can demonstrate that the proposed
control architecture was solely responsible for the
coordinated arm and hand movements (which is the
main objective of this work) as needed to complete
the DFB task. Such an experimental condition is not
only helpful to demonstrate the efficacy of the
proposed control architecture but also could occur
when a low functioning stroke survivor participates
in a task-oriented therapy who will initially need
continuous robotic assistance to perform an ADL
.
The subject was asked to wear the hand device
and then place his forearm on the hand attachment
(Fig. 2A). In the first experiment (E1), we asked the
subject to perform the DFB task, where the task
proceeded as planned (i.e., there was no event
SYNCHRONIZATION OF ARM AND HAND ASSISTIVE ROBOTIC DEVICES TO IMPART ACTIVITIES OF DAILY
LIVING TASKS
9
occurred during the task that would require dynamic
modification of the execution of the task; however, it
still needed the necessary coordination between
hand and arm motion). We designed a DFB task
trajectory in consultation with a physical therapist as
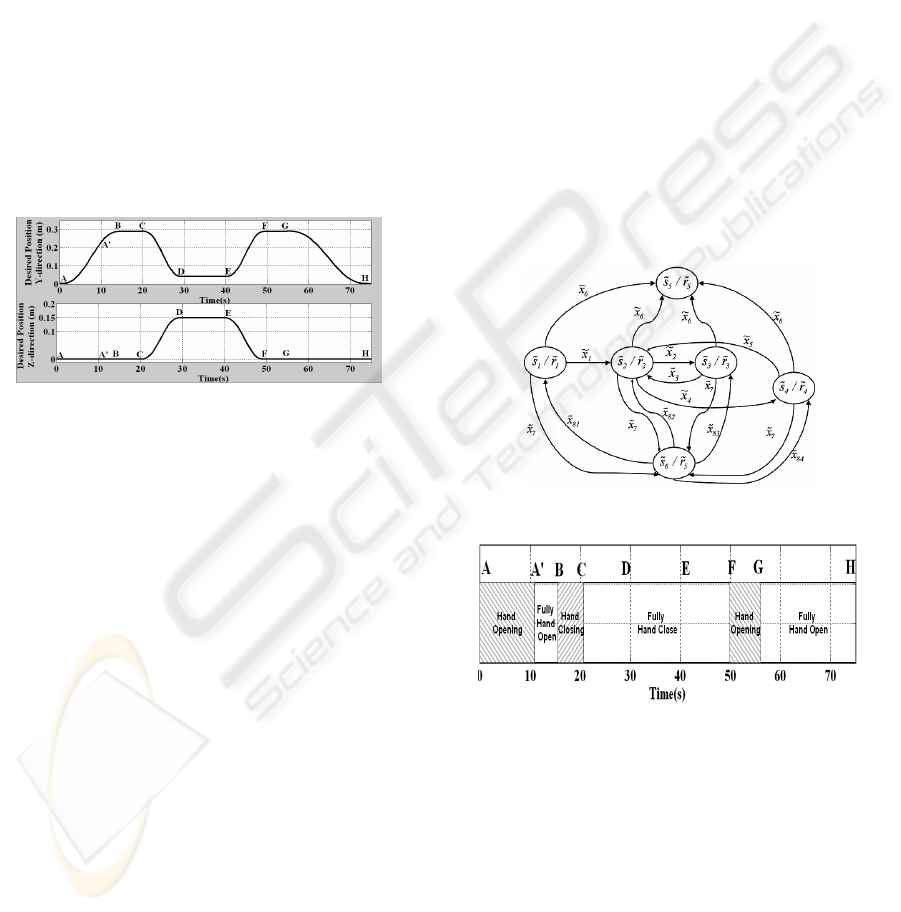
shown in Fig. 3. Fig. 3 shows how the DFB task was
supposed to proceed: the subject was required to
reach the bottle (A-B), grasp the bottle by applying a
certain amount of force (B-C), bring the bottle to the
mouth (C-D), drink water (D-E), bring back the
bottle from where he picked it up (E-F), open hand
to release the bottle (F-G), and then go back to the
starting position (G-H). Furthermore, the desired
trajectory from A-B into A-A’ and A’-B trajectories
have been decomposed because in naturalistic
movement it has been shown that a subject reached
his/her maximum aperture approximately two-third
of the way through the duration of the reaching
movement (Jeannerod, 1981).
Figure 3: Desired Motion Trajectories for a DFB task.
The overall mechanism for the high-level control,
which is used to activate/deactivate the LLACs, is
shown in Fig. 4. When a device is active, we mean it
tracks a non-zero trajectory and when the device is
idle, we mean the device remains in its previous
position set points.
Let us now explain how the HLC accomplished
the DFB task using the control mechanism given in
Fig. 4. When the DFB task started,
s
1
became active
where both arm and hand devices remained active
till point A’ to help the subject to open his hand
while moving towards the bottle. Then at point A’,
the
vir crosses a predefined threshold value, which
confirmed that the subject reached close to the bottle
(
x
1
was generated) and
s
2
state became active. The
arm device remained active to help the subject to
reach the bottle and the hand device was idle from
A’ to B. After that at point B, when the subject’s
position,
x
, was close to the bottle position,
x
t
, and
then
x
2
was generated and
s
3
state became active. If
s
3
was active, then the hand device remained active
to assist the subject to grasp the bottle. Then, at
point C, the
vfsr value was dropped below the
threshold (
x
3
was generated) and
s
2
state became
active again. The arm device remained active to
assist the subject to move the bottle to his mouth, to
drink water using a straw and at the end to leave the
bottle on the table. When the subject brought the
bottle back on the table at point F,
x
4
was generated
and
s
4
state became active and the hand device
remained active to help the subject to open his hand
till G. Then the subject reached the desired grip
aperture
(
)
tt
hand
==
,
x
5
was generated and
s
2
state
became active. The arm device remained active to
help the subject to go back to the starting position.
The actual trajectory of the subject was exactly same
as the desired trajectory given in Fig. 3. The
subject’s hand configuration diagram was given in
Fig. 5. It could be seen from the figures that the
subject was able to track the desired trajectories
while opening/closing his hand at desired times.
Figure 4: Control Mechanism for the HLC.
Figure 5: Hand Configuration Diagram for E1.
In the second experiment (E2), we demonstrated that
if an event takes place at some point of time during
the task execution that requires modification of the
desired task trajectory such as a stroke patient wants
to pause for a while due to some discomfort, then the
HLC has the ability to dynamically modify the
desired trajectory using the control mechanism given
in Fig. 4. In this case, the subject started the
execution of the task with the same desired
trajectory as shown in Fig. 3 (which is the dotted
trajectory in Fig. 6). During the execution of the task
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
10
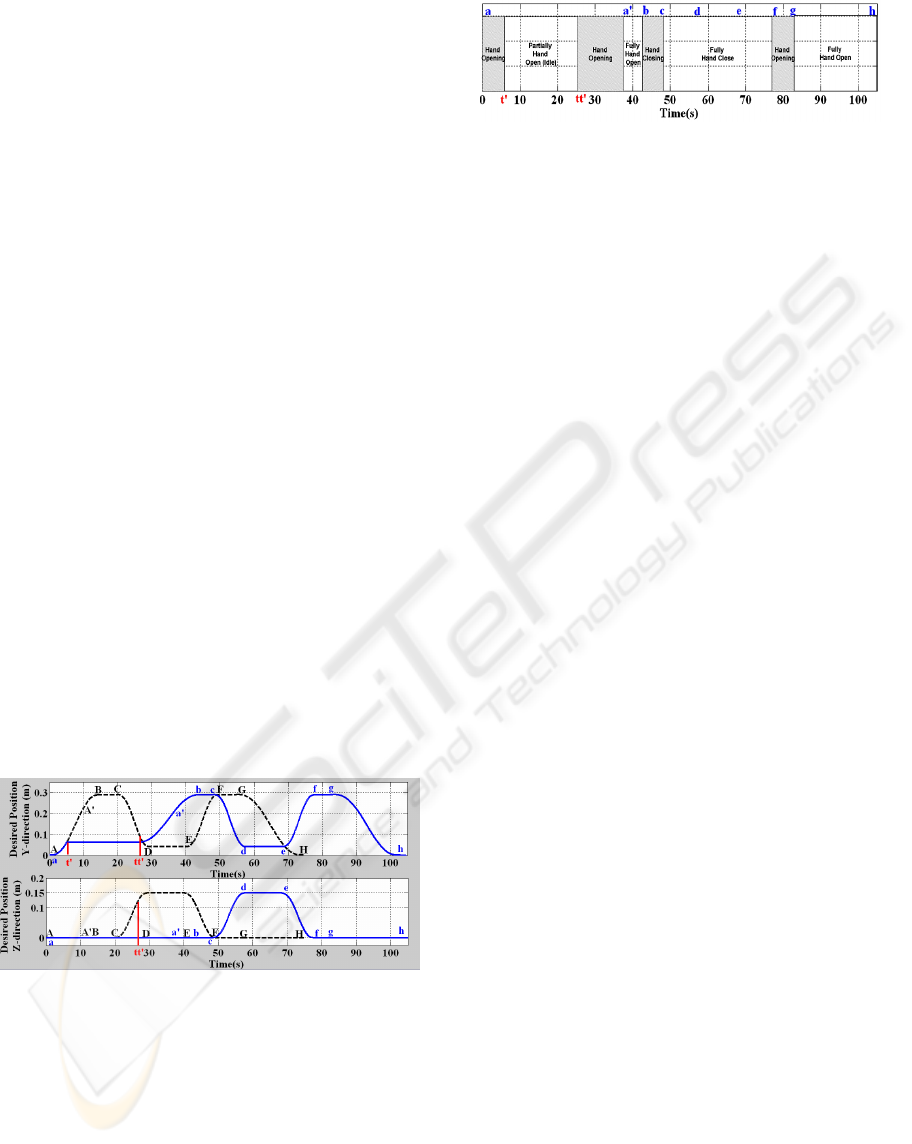
at time t’, the subject pressed the pause button at
time t’ (when
s
1
was active), the plant symbol
7
x
was generated and
s
6
state became active and both
the arm and hand devices became idle.
s
6
state
stored the previous active state. When the subject
released the pause button at time
tt’ to continue the
task execution,
x
81
was generated and
s
1
became
active again to activate both the arm and hand
devices to resume the task execution. The rest of the
desired trajectory had been generated in the same
way as it was described in E1 (Fig. 6-solid lines). It
could be noticed from Fig. 6-solid lines that at time
of
t’, the assistive devices remained in their previous
set points. Additionally, the subject’s position at
time of the
tt’ was automatically detected and taken
as an initial position to continue the task where it
was resumed with zero initial velocity (Fig. 6-solid
lines). If the HLC did not modify the desired
trajectories to register the intention of the subject to
pause the task, then i) the desired motion trajectories
would start at point
tt’ with a different starting
position and a non-zero velocity (Fig. 6 -dotted
lines), which could create unsafe operating
conditions, and ii) the subject would close/open his
hand at undesirable times. We had also noticed that
the subject’s actual trajectory was same as given in
Fig. 6-solid line. Fig. 7 demonstrated the subject’s
hand configuration diagram for E2. It can be noticed
that the subject was able to track the modified
desired trajectory and he was able to coordinate his
arm and hand motions in a safe and desired manner.
Figure 6: Desired Trajectory for the DFB task when an
Unplanned Event Happened.
It is conceivable that one could pre-program all
types of desired trajectories beforehand such that
they could address all types of unplanned events,
and retrieve them as needed. However, for non-
trivial tasks, designing such a mechanism might be
too difficult to manage and extend as needed
.
Figure 7: Hand Configuration Diagram for E2.
5 DISCUSSION/ CONCLUSIONS
The purpose of this work is to design a versatile
control mechanism to enable robot-assisted
rehabilitation in a task-oriented therapy that involves
tasks requiring coordination of motion between arm
and hand. In order to achieve this goal we design a
new intelligent control architecture that is capable of
coordinating both the arm and the hand assistive
devices in a systematic manner. This control
architecture exploits hybrid system modeling
technique to provide the robotic assistance to enable
a subject to perform ADL tasks that may be needed
in a task-oriented therapy and has not been explored
before for rehabilitation purpose. Hybrid system
modeling technique offers systematic control design
tools that provide design flexibility and extendibility
of the controller, which gives ability to integrate
multiple assistive devices and to add/modify various
ADL task requirements in the intelligent control
architecture. The control architecture combines a
high-level controller and low-level assistive
controllers (arm and hand). In here, the high-level
controller is designed to coordinate with the low-
level assistive controllers to improve the robotic
assistance with the following objectives: 1) to
supervise the assistive devices to produce necessary
coordinated motion to complete a given ADL task,
and 2) to monitor the progress and the safety of the
ADL task such that necessary dynamic
modifications of the task execution can be made to
complete the given task in a safe manner.
Although the focus of the current work is to
present a new high-level control methodology for
rehabilitation that is independent of the low-level
controllers, we want to mention the limitations of the
hand and arm assistive devices used in the presented
work. The hand device used in this paper does not
allow independent control of fingers in performing
various hand rehabilitation tasks. As discussed
earlier, the focus of the paper is to present how arm
and hand motion can be dynamically coordinated to
accomplish ADL tasks. In that respect, the current
hand device allowed us to perform an ADL task that
showed the efficacy of the presented high-level
controller. A more functional hand device would
SYNCHRONIZATION OF ARM AND HAND ASSISTIVE ROBOTIC DEVICES TO IMPART ACTIVITIES OF DAILY
LIVING TASKS
11

allow the patients to perform more complex ADL
tasks. Note that this current hand device is being
used with C5 quadriplegic patients to complete their
ADL tasks such as picking up bottle etc. (Broadened
Horizons). We are also aware that a PUMA 560
robotic manipulator might not be ideal for
rehabilitation applications. However the use of
safety mechanisms, both in hardware (e.g.,
emergency button, quick arm release mechanism
etc.) and in software (e.g., within the design of the
high-level controller) will minimize the scope of
injuries. Note that the proposed control architecture
is not specific to the presented assistive devices but
can also be integrated with other assistive devices.
We believe that such a robot-assisted
rehabilitation system with capabilities of
coordination of both arm and hand movement is
likely to combine the advantages of robot-assisted
rehabilitation systems with the task-oriented therapy.
In this paper, the efficacy of the proposed intelligent
controller is demonstrated with healthy human
subject. We are aware that a stroke patient with a
spastic arm is much more different from a healthy
subject following the robotic moves. In that respect,
more functional assistive devices and their
corresponding low-level controllers can be
integrated inside the proposed intelligent controller
to allow stroke patients to take part in task-oriented
therapy. As a future work, it is possible to use
intelligent robot-assisted rehabilitation systems in
clinical trials to understand on how impairment
changes carryover of gained functional abilities to
real living environments and how robot-assisted
environments influence these changes.
ACKNOWLEDGEMENTS
We gratefully acknowledge the help of Dr. Thomas
E. Groomes and Sheila Davy of Vanderbilt
University's Stallworth Rehabilitation Hospital for
their feedback about task design and Mark Felling
who is C5 quadriplegic patient for his feedback
about the hand assistive device.
REFERENCES
Ada, L., Canning, C. G., Carr, J. H., Kilbreath, S. L. &
Shepherd, R. B. (1994). Task-specific training of
reaching and manipulation. In Insights into Reach to
Grasp movement, 105, 239-265.
Broadened Horizons, http://www.broadenedhorizons.com/
Cauraugh J. H., Summers, J.J. (2005). Neural plasticity
and bilateral movements: A rehabilitation approach for
chronic stroke. Prog Neurobiol., 75, 309-320.
Erol, D. & Sarkar, N. (2007), Design and Implementation
of an Assistive Controller for Rehabilitation Robotic
Systems. Inter. J. of Adv. Rob. Sys, 4(3), 271-278.
Immersion Corporation, http://www.immersion.com/.
Jack, D., Boian, R., Merians, A. S., Tremaine, M., Burdea,
G. C., Adamovich, S. V., Recce, M. & Poizner, H.
(2001). Virtual reality-enhanced stroke rehabilitation.
IEEE Transactions on Neural Systems and
Rehabilitation Engineering, 9, 308–318.
Jeannerod, M., (1981). ‘Intersegmental coordination
during reaching at natural visual objects’. In
Attention and performance IX, J. L. a. A. Baddeley,
Ed. New Jersey, (pp. 153-168).
Kahn, L. E., Zygman, M. L., Rymer, W. Z. &
Reinkensmeyer, D. J. (2006). Robot-assisted reaching
exercise promotes arm movement recovery in chronic
hemiparetic stroke: a randomized controlled pilot
study. J. Neuroengineering Rehabil, 3,1-13.
Kline, T., Kamper, D. & Schmit, B. (2005). Control
system for pneumatically controlled glove to assist in
grasp activities. IEEE 9th International Conference on
Rehabilitation Robotics, pp. 78 - 81.
Krebs, H. I., Ferraro, M., Buerger, S. P., Newbery, M. J.,
Makiyama, A., Sandmann, M., Lynch, D., Volpe, B.
T. & Hogan, N. (2004). Rehabilitation robotics: pilot
trial of a spatial extension for MIT-Manus. J
Neuroengineering Rehabil, 1, 1-15.
Koutsoukos, X. D., Antsaklis, P. J., Stiver, J. A. &
Lemmon, M.D. (2000). Supervisory control of hybrid
systems. IEEE on Special Issue on Hybrid Systems:
Theory and Applications, 88, 1026-1049.
Matchar D. B., Duncan, P. W. (1994). Cost of Stroke,
Stroke Clin. Updates. 5, 9-12.
Murphy, M. A., Sunnerhagen, K. S., Johnels, B. & Willen,
C. (2006). Three-dimensional kinematic motion
analysis of a daily activity drinking from a glass: a
pilot study. J. Neuroengineering Rehabil., 16, 3-18.
Loureiro, R., Amirabdollahian, F., Topping, M., Driessen,
B. & Harwin, W. (2003). ‘Upper limb mediated stroke
therapy - GENTLE/s approach. Autonomous Robots,
15, 35-51.
Lum, P. S., Burgar, C. G., Van der Loos, H. F. M., Shor,
P. C., Majmundar, M. & Yap, R. (2006). MIME
robotic device for upper-limb neurorehabilitation in
subacute stroke subjects: A follow-up study. J. of
Rehab. Res. & Dev., 43, 631-642.
Takahashi, C. D., Der-Yeghiaian, L., Le, V. H. & Cramer,
S. C. (2005). A robotic device for hand motor therapy
after stroke. IEEE 9th International Conference on
Rehabilitation Robotics, pp. 17 – 20.
Wood, S. R., Murillo, N., Bach-y-Rita, P., Leder, R. S.,
Marks, J. T. & Page, S. J. (2003).Motivating, game-
based stroke rehabilitation: a brief report. Top Stroke
Rehabil, 10, 134-140.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
12
