
DATA MINING AND KNOWLEDGE DISCOVERY FOR
MONITORING AND INTELLIGENT CONTROL OF A
WASTEWATER TREATMENT PLANT
S. Manesis, V. Deligiannis and M. Koutri
University of Patras,Electrical & Computer Engineering Department, Patras 26500, Greece
Keywords: Intelligent control, Knowledge-based systems, Data mining, Wastewater treatment, Expert-Fuzzy Logic.
Abstract: Intelligent control of medium-scale industrial processes has been applied with success but, as a method of
advanced control, can be further improved. Since intelligent control makes use of knowledge-based
techniques (such as expert systems, fuzzy logic, neural networks, etc.), a data mining and knowledge
discovery subsystem embedded in a control system can support an intelligent controller to achieve a more
reliable and robust operation of the controlled process. This paper proposes a combined intelligent control
and data mining scheme for monitoring and mainly for controlling a wastewater treatment plant. The
intelligent control system is implemented in a programmable logic controller, while the data mining and
knowledge discovery system in a personal computer. The entire control system is basically a knowledge-
based system which improves drastically the behavior of the wastewater treatment plant.
1 INTRODUCTION
Data mining is a fast growing research field aiming
at the extraction of valuable
knowledge from
massive databases. Due to the increasing use of
computing in the context of several applications,
data mining can actually be applied to various
problems related to the operation of man-made
systems and their interactions with other natural
ones. These interactions are becoming significantly
important as populations are growing and world’s
sensitivity for the environment is increasing. An
area of particular success has been in data mining
for wastewater treatment systems and surface water
systems (streams, lakes and rivers), where complex
problems can be solved that are unsolvable by any
other means (Condras et al. 2002; Condras and
Roehl 1999). Data mining tools have been adapted
for unsteady continuous systems, as wastewater
treatment plants where the hydro-dynamical,
biological and physical phenomena are highly
coupled, in order to monitor the wastewater quality
and detect dangerous faults of the process (Victor
Ramos et al. 2004).
On the other hand, intelligent control (DeSilva
1995; Harris et al. 1993), the discipline that
performs human-like tasks in environments of
uncertainty and vagueness with minimal interaction
with human operators, has had a significant impact
in the process industry. The cement industry was, in
fact, the first process industry to apply intelligent
control techniques in the late 1970s in the form of
fuzzy control, and today hundreds of industrial
plants worldwide are controlled by such controllers
(Boverie et al. 1991; Jamshidi et al. 1993; King
1992).
A fundamental attribute of intelligent control is
its ability to work with symbolic, inexact and vague
data which human operators comprehend best.
Indeed, its ability to deal with incomplete and ill-
defined information, an inherent characteristic of
wastewater treatment plants, permits implementation
of human-like control strategies which have hitherto
defied solution by any of the conventional hard
control techniques. Fuzzy logic and artificial neural
networks (Harris et al. 1993) are two examples of
soft computing which have migrated into the realm
of industrial control over the last two decades.
Chronologically, fuzzy control was the first and its
application in the process industry has led to
significant improvements in product quality,
productivity and energy consumption. Fuzzy control
is now firmly established as one of the leading
advanced control techniques in use in industry. Over
86
Manesis S., Deligiannis V. and Koutri M. (2008).
DATA MINING AND KNOWLEDGE DISCOVERY FOR MONITORING AND INTELLIGENT CONTROL OF A WASTEWATER TREATMENT PLANT.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - ICSO, pages 86-93
DOI: 10.5220/0001478400860093
Copyright
c
SciTePress
the last two decades or so wastewater engineering
has undergone significant advances in both theory
and practice. Experience gained from the operation
of numerous wastewater plants, coupled with the
results of recent research in the field, has led to
improved plant design and wastewater management.
Today, effective control of wastewater treatment
plants (Rodriguez-Roda et al. 2002; Manesis et al.
1998; Katebi et al. 2000) is of critical importance
not only for economic reasons but also to satisfy
stringent environmental constraints.
Expert fuzzy control systems have been
developed based on human operators’ experience,
the knowledge of which is acquired by way of
extensive interviews. However, the heuristic
knowledge of an operator, although it can contain
some important consequences about the operational
behavior of a plant, can not be based on a large
number of measurements and trend diagrams. A data
mining and knowledge discovery system can be
used to improve or optimize, as well as to evaluate
the behavior of the controller. Such a research and
development project, called TELEMAC (Lambert
2004; Dixon et al. 2007), within the European IST
program is now working on data mining which
opens up the prospect of learning from data in order
to manage wastewater treatment plants better.
Classification techniques for concept acquisition
have been also applied in order to build knowledge
bases that can help human experts to manage
wastewater treatment plants (Serra et al. 1994).
Usually, a Data Mining and Knowledge Discovery
(DMKD) system (Huang and Wang 1999; Sanguesa
et al. 1997; Dixon et al. 2004; Dixon et al. 2007) for
process monitoring and control is based on simple
measurements of the controlled variables from
which association rules may be found. As a valuable
addition, a DMKD system based on both
measurements and actions of a fuzzy controller is
the main idea presented in this work. Particularly,
the paper describes a new hybrid scheme in which
the induction rules are a priori given but modifiable
while the DMKD system searches on both inputs
and outputs of the fuzzy controller, records the
activity of rules and hence constitutes a part of the
overall controller. Experimental results from a four
months operation period of the treatment process are
presented in last section.
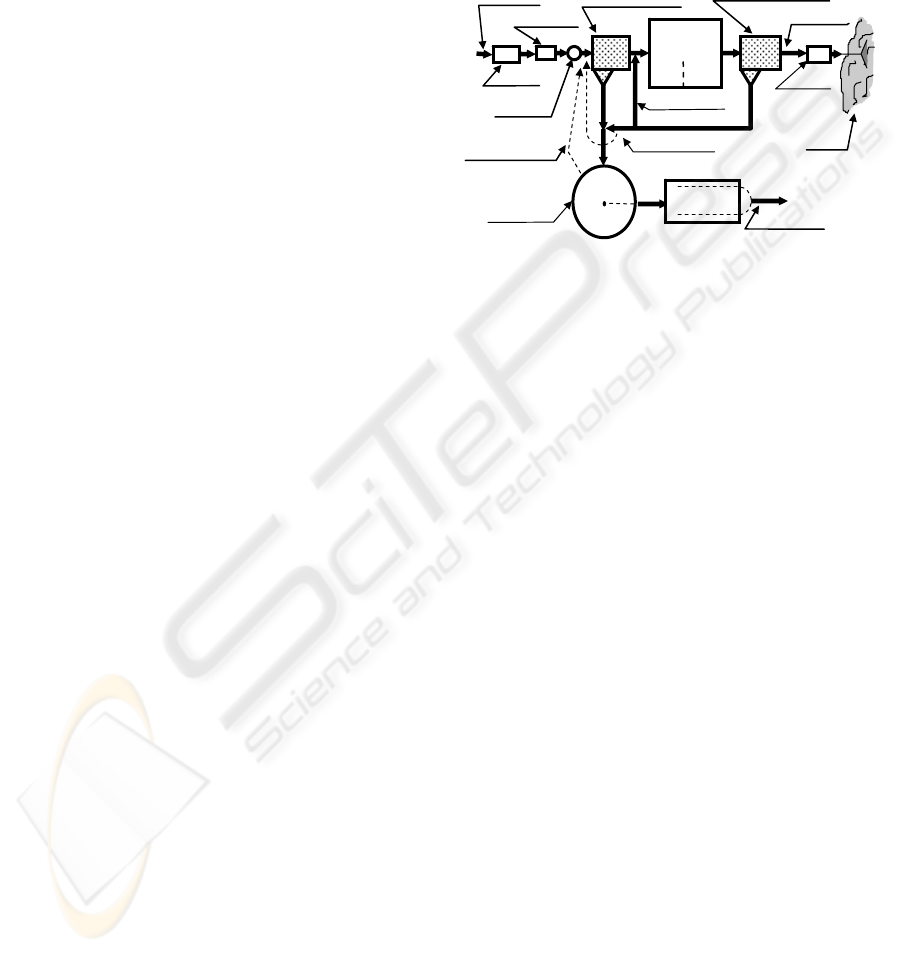
2 WASTEWATER TREATMENT
Wastewater treatment plants typically have two
principal stages as shown in Fig.1, the primary stage
which includes the bar racks, grit chamber and
primary settling tank whose objective is the removal
of the organic load and solids in the wastewater to a
degree of 30-50% and the secondary stage whose
objective is the biological treatment of the organic
load.
Figure 1: Schematic of a typical wastewater treatment
plant.
The removal of organic load (biochemical oxygen
demand or BOD, mixed liquid suspended solids or
MLSS) in conjunction with secondary treatment
performed in the final stage, leads to an overall
treatment level of the order of 80-90%. In all
wastewater treatment plants it is necessary the
oxygen content in the aerated zone to be also
subjected to close control. This is achieved by a
suitable control strategy involving the following
three manipulated variables:
(1) the oxygen supply to the aerated zone (O
2
Feed)
(2) the mixed liquid returns rate from aerated zone
to the anoxic one (R_ml)
(3) the sludge returns rate from settling tank to the
biological reactor (R_Sludge).
The quantities which are appropriately measured by
suitable instrumentation and constitute the
controlled variables of the plant are:
(1) the ammonia concentration in the reactor (N-
NH
3
)
(2) the nitrate concentration in the reactor (N-NO
3
)
(3) the dissolved oxygen in the reactor (DO)
(4) the temperature in the reactor (TEMP)
(5) the mixed liquid suspended solids concentration
in the reactor (MLSS)
(6) the difference in biochemical oxygen demand
between the entrance and exit of the secondary
settling tank (D(BOD))
These six variables constitute therefore the inputs to
Biological
treatment
Primar
y
settlin
g
Secondar
y
settlin
g
tank
Chloring
Sludge
Di
Sludge
Fusion
Sludge returns
Remaining
sludge
Slud
g
e
feed
Bar racks
Grit
Skimming
tank
Fields
Irrigation
Suspended liquids
Solids stora
g
e
Cl
DATA MINING AND KNOWLEDGE DISCOVERY FOR MONITORING AND INTELLIGENT CONTROL OF A
WASTEWATER TREATMENT PLANT
87

the intelligent controller. By the nature of the
process and the interaction of the controlled
variables it is obvious that effective control can only
be achieved by means of a multivariable controller
behind of which complex knowledge must exist.
3 INTELLIGENT CONTROL
OF A WASTEWATER
TREATMENT PLANT
Having established the principal controlled and
manipulated variables, the next task in developing
an intelligent controller for a wastewater treatment
plant, using linguistic techniques, is to establish a set
of linguistic descriptors for each manipulated
variable. These are expressions of the type Very
high, High, Low, OK etc. which are commonly used
by plant operators. The integrity of an intelligent
controller is directly related to the number of such
descriptors, bur practical limitations place a limit on
this number. The granularity of the controller is
inversely proportional to the number of linguistic
descriptors. Three descriptors are generally
sufficient to describe the controller input variables,
the HI (High), OK and LO (Low) descriptors all
with trapezoidal membership functions. The
locations of the centroids of the membership
functions can be considered as the modal points of
the fuzzy resolution while the number of such modal
points corresponds to the number of fuzzy states of
the variable. Also, the intermodal spacing of the
membership functions is a measure of the resolution
of the variable. It is obvious that the overall
accuracy of the intelligent control system is directly
related to this resolution. In a similar manner, the
manipulated variables or controller outputs are
allocated by five descriptors VH (VeryHigh), HI
(High), OK, LO (Low) and VL (VeryLow) which
provide sufficient fineness of control. For
computational simplicity, singletons provide a
convenient way to describe the membership
functions of the controller outputs where high
accuracy is not of paramount importance and also
lead to a particularly simple arithmetic procedure for
defuzzification.
The inference engine of the intelligent controller
manipulates linguistic control rules of the form:
R: if ((D(BOD) is Y
1
) and (MLSS is
Y
2
) and (TEMP is Y
3
and (DO is
Y
4
) and (N-NH
3
is Y
5
) and (N-NO
3
is Y
6
)) then ((O
2
Feed is U
1
) and
(R_Sludge is U
2
) and (R_ml is
U
3
))
where Y
m
and U
n
are the linguistic descriptors of the
m controller inputs and n outputs respectively,
where m ∈ {1,2,3,4,5,6} and n ∈ {1, 2, 3}. For the
kth linguistic rule, the values of the membership
functions corresponding to the process outputs (i.e.
the controller inputs) are computed to form the array
)(...)()),((
3621
NONMLSSBODD
kkk
−
μμμ
the minimum element of which is the degree of
fulfillment of that rule and is a measure of the
contribution of that rule to the final control action,
i.e.
{
}
1263
min ( ( )), ( )... ( ) [0,1]
kkk
k
DBOD MLSS N NO
σμ μ μ
=−∈
The union of the weighted products of the
corresponding membership functions of the
controller output fuzzy sets
{}
)(⋅v is subsequently
computed to form the resultant output membership
functions. The membership function of the jth
controller output is thus the result of the max
operator:
{
}
11 2 2 2 33
max ( ), ( _ ), ( _ )
jj j
v O Feed v R Sludge v R ml
σσ σ
The engineering values of the controller outputs,
necessary to drive the actuators of the plant under
control are obtained following the defuzzification
controller outputs are described by p singletons the
centre of gravity (COG) of the jth controller output
is simply the inner product procedure. When the
membership functions of the:
jjj
zy ,
ϕ
=
where the coefficients
[]
1,0
1
∈=
∑
=
p
l
l
j
j
σ
σ
ϕ
are the fractional degrees of fulfillment while the
array
{
}
j
z
contains the locations of the singletons
of the membership functions of the outputs.
A fuzzy system shell (FuzzyControl++ S7 ® by
Siemens) was used to develop the intelligent
controller of the wastewater treatment plant for a
city of 120.000 PE in Greece. The shell uses
trapezoidal membership functions, Mamdani max-
min inference and COG defuzzification (Mamdani
1974; Patyra and Mylnak 1996). A Simatic S7-300
programmable logic controller equipped with digital
and analogue input-output cards, to which the plant
sensors and actuators are directly connected, has
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
88
been selected. This actual controller is linked to a
host computer necessary not only for the fuzzy
system shell implementation but also for the data
mining and knowledge discovery procedure which is
described in next section.
4 DATA MINING AND
KNOWLEDGE DISCOVERY
FOR INTELLIGENT CONTROL
With intelligent controller being operated as
described above, the controller accepts a stream of
data and decides about the actions on the
manipulated variables. The generated continuously
over time actions, together with the operational
conditions constitute a kind of knowledge,
remarkably accepted or not, which nobody exploits.
Hence, a DMKD system should be introduced in
order to acquire and evaluate this knowledge. It is
known that the operational data of any industrial
process are used by plant operators and supervisors
to develop an understanding of a plant operation
through interpretation and analysis. In a first level,
there are methodologies and tools that automate data
interpretation and analysis derived by a large
number of measurements. In industrial processes
which already operate with an expert-fuzzy rule-
based controller the requirements of this first level
have been realized. Human operators are more
concerned with the current status of the process and
possible future behavior rather than the current
values of individual variables. Apart from simple
measurements, we need in a second level a
furthermore analysis of the dataset consisting of the
combined output actions and input measurements,
which only the expert fuzzy controller can give us
during its operation. Therefore, we propose the
analysis of the set of the fuzzy control states with
the use of DMKD techniques. Data mining refers to
the extraction of interesting patterns from large
amounts of data, while involves the use of
techniques from multiple disciplines such as
database technology, statistics, machine learning,
neural networks, information retrieval, etc.
Knowledge Discovery in Databases (KDD) concerns
a systematic process consisting of a set of well-
defined steps. Data mining constitutes a step in the
whole knowledge discovery process (Comas et al.
2001; Gibert et al. 2005). The processes controlled
by expert-fuzzy controllers are usually slow
procedures and hence the DMKD process can
operate off-line allowing the human confirmation.
The data mining algorithmic procedure will operate
as a computational component at the control center
and will run periodically to discover knowledge and
update the knowledge base.
4.1 Problem Ddefinition and
Rrepresentation
Given a wastewater treatment plant along with the
corresponding intelligent controller, we define the
fuzzy control state as the vector
((m
1
, m
2
, m
3
, m
4
, m
5
, m
6
), (u
1
, u
2
, u
3
), t
k
)
where m
i
, i=1,…,6 are the measurements of the
inputs for which the fuzzy controller decides the
actions u
j
, j=1,…,3 for the corresponding outputs at
the time stamp t
k
, k= 1, 2 …,
∞
. According to this
description, a set of fuzzy control states could be
stored in a relational database on which data mining
could be performed. A relational database is a
collection of tables, each of which is properly
named. In our case there is one table representing
the set of fuzzy states (see Table 1). As an example,
the fuzzy state s
1
is defined as
s
1:
((HI, OK, OK, LO, OK, OK), (VH, OK, LO), 2)
The table of fuzzy control states results after
removing the erroneous data and integrating
information from various data sources, in particular
from the measurements and actions, as well as from
the set of fuzzy rules. Particularly, the rule activity
and the degree of rule fulfillment are also stored in
database. This process constitutes the first step of
the overall knowledge discovery process. The
second step concerns the data selection and
transformation into meaningful representations. In
our case, the time stamp may partially eliminated,
because we are interesting in the behavior of the
system during a period of time rather than a
particular time instance. For example, weather
conditions for certain periods of time may affect the
plant operation. Changes in rainfall, temperature and
humidity must be recorded with time stamp and
correlated with the rest of mined data.
Table 1: Fragment of records from the database for fuzzy
control states
m
1
m
2
m
3
m
4
m
5
m
6
u
1
u
2
u
3
t
s
1
HI
OK
OK
LO
OK
OK
VH
OK
LO
2
s
2
HI
OK
HI
LO
OK
LO
VH
LO
LO
3
s
3
…
DATA MINING AND KNOWLEDGE DISCOVERY FOR MONITORING AND INTELLIGENT CONTROL OF A
WASTEWATER TREATMENT PLANT
89

4.2 Mining Interesting Patterns
Data mining methods and techniques could be
applied into the set of cleaned records, in order to
discovering interesting patterns. Association rule
mining, clustering, and classification seem to better
serve the needs of the particular problem of
controlling a plant. Association rule mining aims at
finding frequent patterns, associations, correlations,
or causal structures among sets of items or objects in
transaction databases, relational databases, and other
information repositories (Vazirgiannis et al. 2000).
An association rule is a statement of the form A⇒B,
where A and B are disjoint subsets of a set of items.
The rule is accompanied by two meaningful
measures, confidence and support. Confidence
measures the percentage of transactions containing
A that also contain B (i.e. confidence (A⇒B) =
P(B\A)). Similarly, support measures the percentage
of transactions that contain A or B (i.e. support
(A⇒B) = P(B∪A)) (Han and Kamber 2001).
The application of association rule mining
algorithms in the relational database of the control
states of the wastewater treatment plant could
produce interesting results. If the derived set of
association rules contains some rules not already
encountered into the input data set, then these new
rules could be embedded into the inference
mechanism of the expert-fuzzy controller.
Techniques of rule induction are also being applied
to estimate values of sensors readings based on more
easily obtained values, and to determine how
reliable the models remain over time. Rules may be
generated in forms such as the following,
Variable (DO) falls in a
particular range of low values
if variable D(BOD) falls
within a particular range of
high values
accompanied by an indication of the degree of
satisfaction of the rule.
Subsequently, the clustering concerns the process
of grouping a set of physical or abstract objects into
classes of similar objects. So, a cluster is a collection
of data objects that are similar to one another within
the same cluster and are dissimilar to the objects in
other clusters (Han and Kamber 2001; Gibert et al.
2005). The application of clustering into a set of
data objects requires that the data objects are not
class-labeled. In our specific problem a state,
consider for example s
1
(see Table 1), constitutes a
data object. This data object is labeled by the values
of the three output variables, u
1
, u
2
, and u
3
. The
unlabeled data object corresponding to s
1
is:
s
1
: (HI, OK, OK, LO, OK, OK)
The application of clustering algorithms to the set of
unlabeled states could conduct to the identification
of states of similar behavior and, thus, to the
derivation of theoretical and more general rules.
Lastly, classification could be considered as a
function that maps (classifies) a data object into one
of the several predefined classes (Vazirgiannis et al.
2000). That means (i) a well-defined set of classes,
and (ii) a set of pre-classified data objects are
required. Consequently, classification is a two-step
process: learning and classification. During the
learning sub-process, the set of labeled data objects
is analyzed using a classification algorithm and a
classification model is derived. Next, during the
classification sub-process, the model can be applied
to the new unlabeled data objects for inferring their
classes. To be clearer, in our case, a classification
algorithm is firstly applied on the set of cleaned
control states in order to find a classification model.
Next, whenever a new unlabeled state appears, the
model is applied for classifying this new state; in
other words for deciding the actions u
1
, u
2
, and u
3
.
Classification is, thus, another way for creating new
rules, for testing and modifying the existing ones.
4.3 Data Mining Tools
The selection of a commercial data mining tool
depends on various similar parameters, such as:
• system issues (like operating system, client-
server architecture, etc.)
• support of different types of data sources
(ASCII files, relational databases, ODBC
connections)
• support of various data mining algorithms
• visualization of the resulted patterns
• price
• ease of learning to use
For the wastewater treatment plant application
described above and particularly for a plant of
medium size we need a stand-alone PC architecture
with windows operating system, to support only flat
files with numerical data and various mining
algorithms while visualization in not necessary.
Some examples of data mining tools are IBM
Intelligent Miner, SGI MineSet, Clementine (SPSS)
and GESCONDA (Gibert et al. 2005), from which
the first one has been selected to implement the
current project.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
90
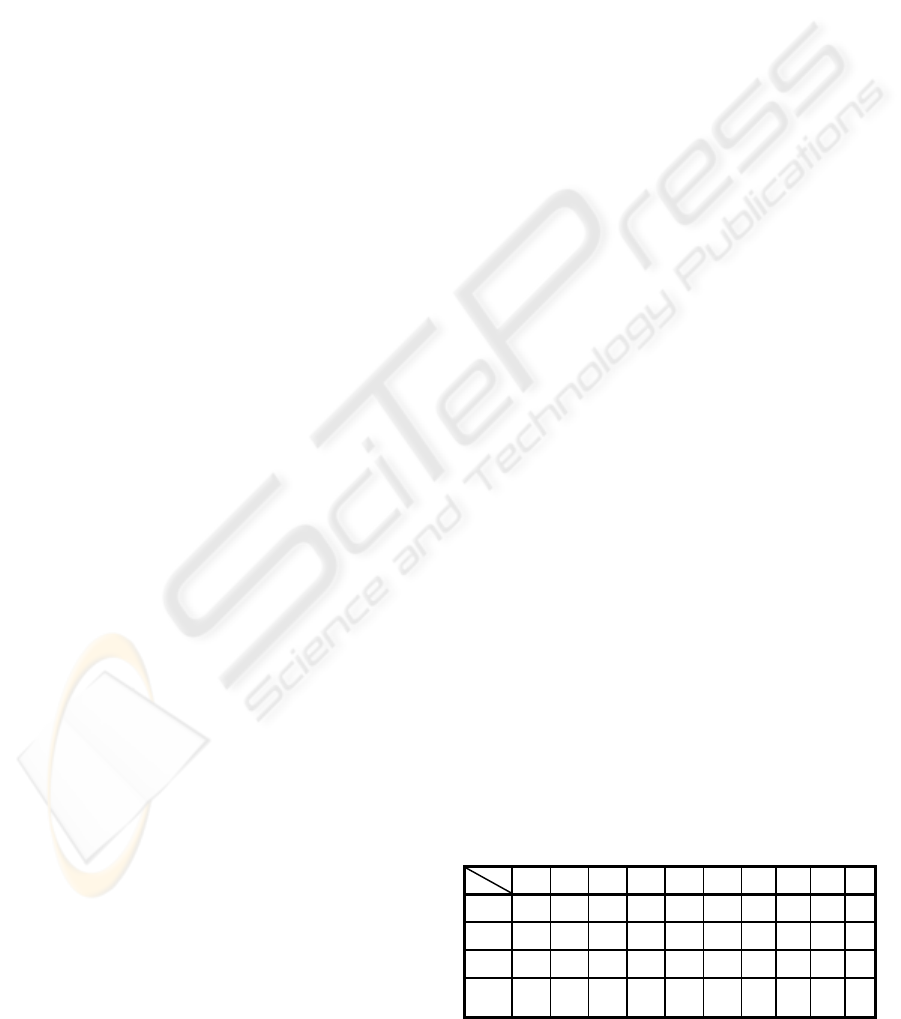
5 EXPERIMENTAL RESULTS
In this work, we used the time series data of four
months (April 2006 to July 2006) measured or
recorded at the medium-size wastewater treatment
plant mentioned above. As one example for all of
these data records the measurements in the influent
D(BOD), N-NO
3
and DO are shown in Fig.2.
Zooming into this plant’s monitoring in order to
achieve better resolution the corresponding
measurements are shown in Fig.3 and Fig.4 in a
two-day and one-day section for D(BOD) and N-
NO
3
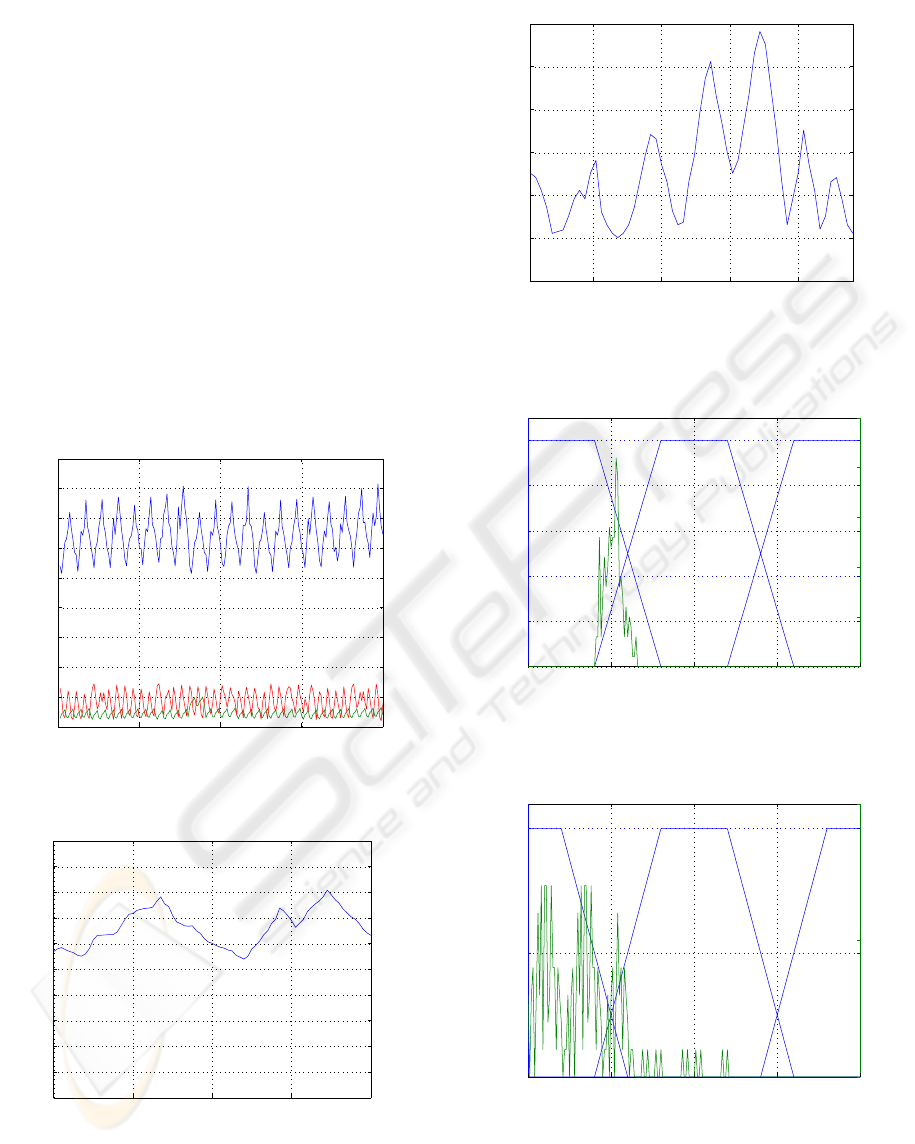
concentrations respectively. The set of acquired
data includes also the actions of the fuzzy controller
which are recorded in the database by means of
rules activity. Figs.5, 6, 7 show the membership
functions and the input value appearance frequency
for the D(BOD), N-NO
3
and DO respectively. The
10 15 20 25 30
0
2
4
6
8
10
12
14
16
18
Time [days]
[mg/l]
D(BOD) (blue), N−NO3 (red), DO (green)
Figure 2: Measured D(BOD), N-NO3 and DO
concentrations during the period 10/6 – 30/6 2006.
16 16.5 17 17.5 18
0
2
4
6
8
10
12
14
16
18
20
Time [days]
D(BOD) [mg/l]
Figure 3: Two-day section of D(BOD) concentration from
the four months data (16/6-18/6 2006).
5 10 15 20
0
0.5
1
1.5
2
2.5
3
Time [hours]
N−NO3 [mg/l]
Figure 4: One-day section of N-NO
3
concentration from
the four months data.
−100 −50 0 50 100
0
0.2
0.4
0.6
0.8
1
Normalised values
ì[D(BOD)]
−100 −50 0 50 100
0
5
10
15
20
25
Input value appearance frequence
Figure 5: Membership functions and sampled
measurements for D(BOD).
−100 −50 0 50 100
0
0.5
1
Normalised values
ì[DO]
−100 −50 0 50 100
0
5
10
Input value appearance frequence
Figure 6: Membership functions and sampled
measurements for DO.
DATA MINING AND KNOWLEDGE DISCOVERY FOR MONITORING AND INTELLIGENT CONTROL OF A
WASTEWATER TREATMENT PLANT
91
−100 −50 0 50 100
0
0.5
1
Normalised values
ì[N−NO3]
−100 −50 0 50 100
0
5
10
Input value appearance frequence
Figure 7: Membership functions and sampled
measurements for N-NO
3
.
The values in these three figures are normalized into
the domain [-100, 100] since the six inputs variables
get values in different domains and hence
uniformity is needed. By inspection of Fig.5 one can
deduce that the most of the reformatted
measurements belong partially in both LO and OK
membership functions. This means that a
reconfiguration of the defined membership
functions is required in order to have a set of
membership functions which will cover effectively
the actual values of D(BOD) in the real process. The
narrow distribution of the sampled measurements
into the heuristically predefined membership
functions indicates furthermore that reconfiguration
is necessary. Another conclusion concerns the small
variation of D(BOD) measurements in comparison
to the corresponding predefined range of D(BOD)
values and therefore has to be reconsidered. Fig.6
shows a more uniform distribution of the sampled
measurements of DO, while the best distribution of
the obtained measurements is depicted in Fig.7
concerning the N-NO
3
variation.
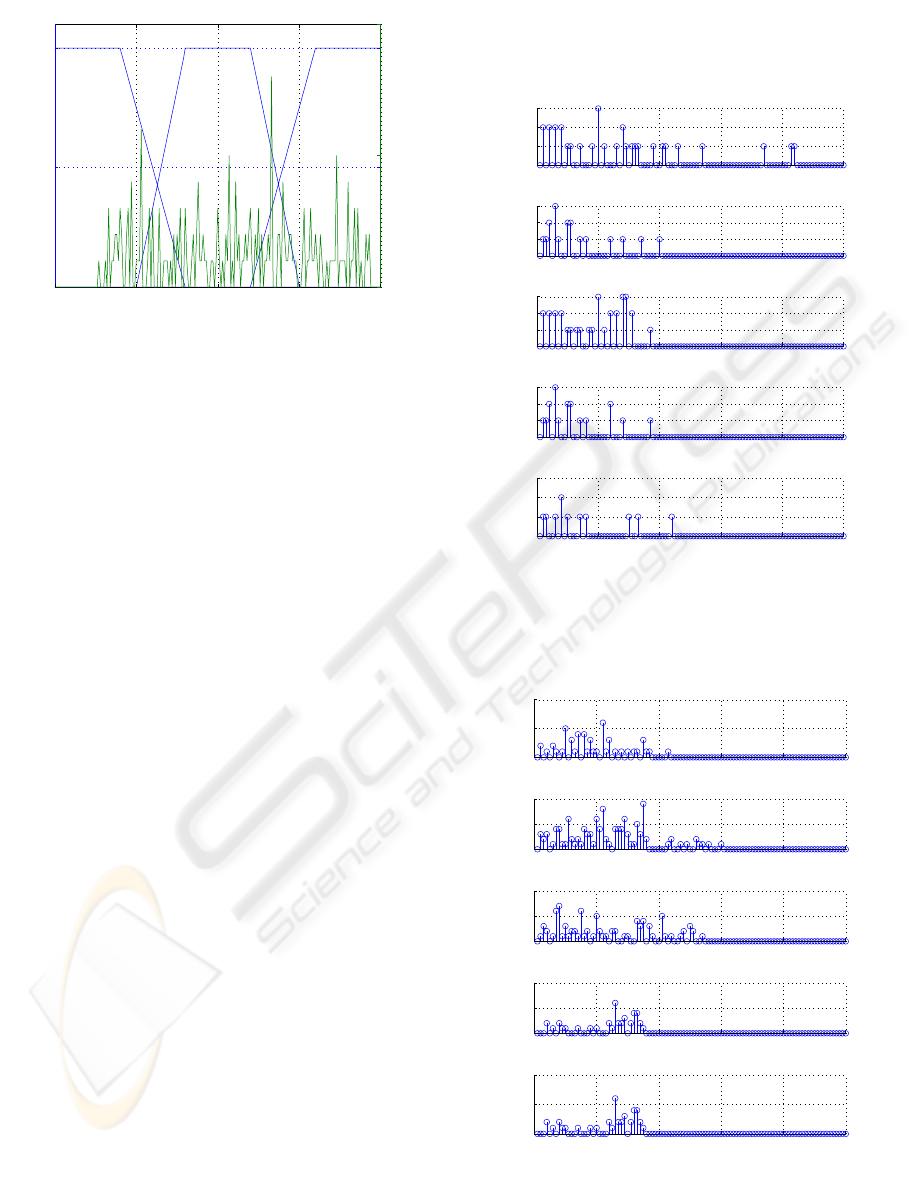
5.1 Rule Activity-Modification
As mentioned above, the second step of the overall
knowledge discovery process concerns the data
selection based on statistical criteria and the
transformation of them into meaningful
representations. As a first approach to obtain
cleaned data for knowledge creation, the rule
activity has been recorded in DMKD off-line
module and some results are shown in Fig.8 and
Fig.9. Each figure has five subplots for equal
number of rules. For each rule, the number of
appearances is shown as a function of the degree
fulfillment. For example, rule No.5 was satisfied
three times with a 20% degree of fulfillment. Fig.8
indicates the least active rules while Fig.9 shows the
corresponding most active ones.
0 20 40 60 80 100
0
1
2
3
Rule 5
Degree of fulfilment
# of appear.
0 20 40 60 80 100
0
1
2
3
Rule 6
Degree of fulfilment
# of appear.
0 20 40 60 80 100
0
1
2
3
Rule 14
Degree of fulfilment
# of appear.
0 20 40 60 80 100
0
1
2
3
Rule 15
Degree of fulfilment
# of appear.
0 20 40 60 80 100
0
1
2
3
Rule 41
Degree of fulfilment
# of appear.
Figure 8: Statistical analysis of the least-active rules
behavior.
0 20 40 60 80 100
0
5
10
Rule 31
Degree of fulfilment
# of appear.
0 20 40 60 80 100
0
5
10
Rule 32
Degree of fulfilment
# of appear.
0 20 40 60 80 100
0
5
10
Rule 33
Degree of fulfilment
# of appear.
0 20 40 60 80 100
0
5
10
Rule 40
Degree of fulfilment
# of appear.
0 20 40 60 80 100
0
5
10
Rule 42
Degree of fulfilment
# of appear.
Figure 9: Statistical analysis of the most-active rules
behavior.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
92

6 CONCLUSIONS
Although wastewater treatment plants are
implemented with properly functioning control
loops concerning the biological process, in practice,
this type of plant requires a major time investment
on the side of the operator, involving many manual
operations. These difficulties can be overcome by an
intelligent controller which incorporates the human
experience. The mined data, characterized as
multivariate and interrelated, constitutes a
combination of measurements of the process’s
variables and actions of the controller. The
consequences of the mining and knowledge
discovery procedure are used to adapt the soft
structure of the intelligent controller through a semi-
automatic scheme that provides deeper
understanding and better operation of the controlled
plant. The experimental results give us basic
directions to improve the operation of the control
system but it is obvious that a longer validation
period of data monitoring and processing is needed.
REFERENCES
Boverie, S, Demaya, B and Titli, A, 1991, Fuzzy logic
control compared with other automatic control
approaches, Proceedings of 30
th
CDC Conference,
Brighton.
Comas, J., Dzeroski, S., Gibert, K., Roda, I.R. and
Sanchez-Marre M., 2001. Knowledge discovery by
means of inductive methods in wastewater treatment
plant data”, AI Communications, Vol.14(1), pp.45-62.
Condras, P, Cook, J and Roehl E, 2002, “Estimation of
Tidal Marsh Loading Effects in a Complex Estuary”
American Water Resources Association Annual
Conference, New Orleans.
Condras, P and Roehl, E, 1999, Real-time control for
matching wastewater discharges to the assimilative
capacity of a complex tidally affected river basin
South Carolina Environmental Conference, Myrtle
Beach.
DeSilva, C W, 1995, Intelligent Control, Fuzzy Logic
Applications, CRC Press, Boca Raton.
Dixon, M., Gallop, J.R., Lambert, S.C., Lardon L., Steyer
P. and Healy J.V., 2004. Data mining to support
anaerobic WWT plant monitoring and control,
Proceedings of the IFAC Workshop on Modelling and
Control for Participatory Planning and Managing
Water Systems, Venice Italy,.
Dixon, M., Gallop, J.R., Lambert S.C. and Healy, J.V.,
2007. Experience with data mining for the anaerobic
wastewater treatment process, Environmental
Modelling & Software, Elsevier, , vl.22, pp.315-322.
Gibert, K., Sanchez-Marre, M. and Flores X., 2005.
Cluster discovery in environmental databases using
GESCONDA: The added value of comparisons, AI
Communications, Vol.18(4), pp.319-331.
Han, J and Kamber, M, 2001, Data Mining: Concepts and
Techniques, San Francisco, Morgan Kaufmann.
Harris, CJ, Moore, CG and Brown, M, 1993, Intelligent
control-aspects of fuzzy logic and neural nets, NJ,
World Scientific Publishers.
Huang, YC and Wang, XZ, 1999, Application of fuzzy
causal networks to wastewater treatment plants,
Chemical Engineering Science 54:2731-2738.
Jamshidi, M, Vadiee, N and Ross, TJ, 1993, Fuzzy Logic
and Control–Intelligentware and Hardware Applicati-
ons, NJ, Prentice Hall.
Katebi, R, Johnson, M and Wilkie, J, 2000, The future of
Advanced Control in Wastewater Treatment Plants,
Proceedings of the CIWEM Millennium Conference
Leeds UK.
King, R, 1992, Expert supervision and control of a large-
scale plant, Journal Intelligent and Robotic Systems,
2(3).
Lambert, S, 2004, (CCLRC-Data mining Resp.)
Telemonitoring and advanced tele-control of high
yield wastewater treatment plants, TELEMAC, R&D
project, No. IST-28156.
Mamdani, EH, 1974, An application of fuzzy algorithms
for the control of a dynamic plant, Proceedings IEE ,
121(12).
Manesis, S, Sapidis DJ and King RE, 1998, Intelligent
Control of Wastewater treatment Plants, Journal
Artificial Intelligence in Engineering (12):275-281.
Patyra, MJ and Mylnak, DM, 1996, Fuzzy Logic
Implementation and Application, NJ, J. Wiley-
Teubner.
Rodriguez-Roda, I, Sanchez-Marre, M, Comas, J, Baeza,
J, Colprim, J, Lafuente, J, Cortes, U and Poch M,
2002, A Hybrid Supervisory System to Support
WWTP Operation: Implementation and Validation,
Water Science and Technology Journal (45): 289-297.
Sanguesa, R, Cortés, U and Béjar, J, 1997, Causal
dependency discovery with posscause: an application
to wastewater treatment plants, Proceedings of the 1
st
International Conference on the practical application
of knowledge discovery and data mining, London.
Serra, P, Sànchez, M, Lafuente, J, Cortès, U and Poch, M,
1994, DEPUR: a knowledge-based tool for wastewater
treatment plants, Engineering Applications of
Artificial Intelligence, 7(1):23-30.
Vazirgiannis, M and Halkidi, M, 2000, Data Mining:
Concepts and Techniques, Athens University of
Economics and Business, TR HELDiNET 10.
Victor Ramos, J, Goncalves, C and Durado, A, 2004, On-
line Extraction of Fuzzy Rules in a Wastewater
Treatment Plant, Proceedings of the 1
st
International
Conference on Artificial Intelligence Applications and
Innovations, 1:87-102.
DATA MINING AND KNOWLEDGE DISCOVERY FOR MONITORING AND INTELLIGENT CONTROL OF A
WASTEWATER TREATMENT PLANT
93
