
MODIFIED LOCAL NAVIGATION STRATEGY FOR
UNKNOWN ENVIRONMENT EXPLORATION
Safaa Amin, Andry Tanoto, Ulf Witkowski, Ulrich Rückert
System and Circuit Technology, Heinz Nixdorf Institute, Paderborn University
Fuerstenallee 11, D-33102 Paderborn, Germany
Saied Abdel-Wahab
Faculty of Computer and Information Sciences, Ain Shams University, Cairo, Egypt
Keywords: Exploration, Mini-robot Khepera, Teleworkbench.
Abstract: This paper presents an algorithm for unknown environment exploration based on the local navigation
algorithm (LNA). The original LNA doesn’t take into account the case in which the robots are trapped and
stop exploring the environment. In this paper, we propose some modifications to overcome this problem and
demonstrate it by using real robots. For validation purpose, we ran several experiments using the mini-robot
Khepera II running on the Teleworkbench. The complete environment is divided into small quadratic
patches with some objects placed in it representing obstacles. With on-board infrared sensors and wheel
encoder, the robot can successfully explore the unknown environment. Moreover, by calculating the
distance to surrounding patches, the implemented algorithm will minimize the distance traveled, and in turn
of the consumed energy and time. This paper also shows the advantage of using the Teleworkbench for
performing experiments using real robots.
1 INTRODUCTION
Exploration of unknown environments is one of
important problems in robotics. The goal of the
exploration task is to cover the whole environment
in a minimum amount of time or with minimum
consumed energy depending on the application.
Exploration approaches focus on guiding the robot
efficiently through the environment in order to build
a map. Exploration algorithms using either a single
or a multi-robot system based on simulations have
been studied extensively in the past (Stachniss,
2006, Simmons, 2000, Manolov, 2003, and Burgard,
2000). In this paper we present the result of the
implementation of local navigation algorithm (LNA)
for environment exploration as introduced in
(Manolov, 2003, Amin, 2007). We also modify the
LNA to solve the problem of trapped robot so that it
can explore the whole environment successfully
independent of its shape and the position of the
obstacles. Moreover, we use the distance of the
neighbouring patches relative to the current robot
position to further improve the algorithm. We also
demonstrate the implementation of the modified
algorithm using the mini-robot Khepera II.
Furthermore, we demonstrate the advantage of using
the Teleworkbench (Tanoto, 2005) as a test bed for
performing and analysing experiments with real
robots. For experiment analysis, we have developed
a graphical analysis tool based on the MPEG-4
video standard (Tanoto, 2006). This tool allows us
to record a video of the experiments together with
experimental data and to visualize the internal and
external behaviour of robots.
The paper is organized as follows: after presenting
related work, Section 3 describes the LNA for
unknown environment exploration and its limitation.
Our modified algorithm (MLNA) is presented in
Section 4. After that we present a comparison result
between the two algorithms using the mini-robot
Khepera II on the Teleworkbench. Finally, Section 6
concludes the paper.
171
Amin S., Tanoto A., Witkowski U., Rückert U. and Abdel-Wahab S. (2008).
MODIFIED LOCAL NAVIGATION STRATEGY FOR UNKNOWN ENVIRONMENT EXPLORATION.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 171-176
DOI: 10.5220/0001481801710176
Copyright
c
SciTePress
2 RELATED WORK
Exploration is the task of guiding a vehicle in such a
way that it covers the environment with its sensors.
Efficient exploration strategies are also relevant for
surface inspection, mine sweeping, or surveillance
(Choset, 2001). In the past, several strategies for
exploration have been developed. One group of
approaches deals with the problem of simultaneous
localization and mapping (Bourgoult, 2002). A
common technique for exploration strategies is to
extract frontiers between known and unknown areas
(Edlinger, 1994, Yamauchi, 1999) and to visit the
nearest unexplored place. These approaches only
distinguish between scanned and un-scanned areas
and do not take into account the actual information
gathered at each view-point. To overcome this
limitation (Gonzales, 2001) determine the amount of
unseen area that might be visible to the robot from
possible view-points. To incorporate the uncertainty
of the robot about the state of the environment
(Moorehead, 2001) and (Bourgault, 2002) use
occupancy grids (Hans, 1985) and compute the
entropy of each cell in the grid to determine the
utility of scanning from a certain location. (Whaite,
1997) present an approach that also uses the entropy
to measure the uncertainty in the geometric structure
of objects that are scanned with a laser range sensor.
In contrast to the work described here they use a
parametric representation of the objects to be
scanned. (Edlinger, 1994) developed a hierarchical
exploration strategy for office environments. Their
approach first explores rooms and then traverses
through doorways to explore other parts of the
environment. (Tailor, 1993) describe a system for
visiting all landmarks in the environment of the
robot. Their robot maintains a list of unvisited
landmarks that are approached and mapped by the
robot. (Dudek, 1991) propose a strategy for
exploring an unknown graph-like environment.
Their algorithm does not consider distance metrics
and is designed for robots with very limited
perceptual capabilities. Recently, Koenig has shown,
that a strategy, which guides the vehicle to the
closest point that has not been covered yet, keeps the
travelled distance reasonably small (Koenig, 2001).
However, as experiments reported in this paper
illustrate, such techniques can lead to a serious
increase of measurements necessary to build an
accurate map if the robot is not able to incorporate
measurements on-the-fly while it is moving. This
might be the case, for example, for robots extracting
distance information from camera images.
3 LOCAL NAVIGATION
STRATEGY
FOR ENVIRONMENT
EXPLORATION
The exploration strategy has to ensure that the
complete area is explored. The LNA computes only
the next step for moving. The computation is
dependent on the area around the robot (Manolov,
2003).
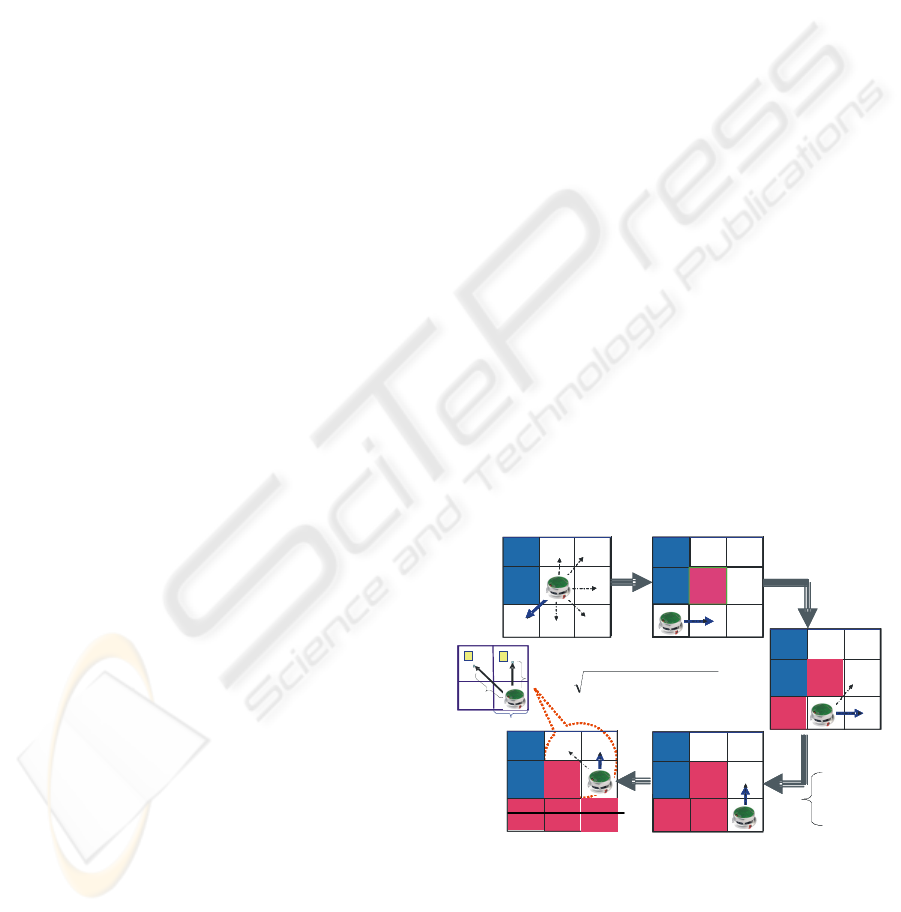
The exploration algorithm works as follows. The
complete environment is divided into small
quadratic patches. The robot starts the exploration
from any position in the environment. It can move
between patches in all directions (east, west, north,
south, and diagonal). When the robot visits a certain
patch, it is considered to be analyzed. For the
computation of the next movement, an algorithm is
used to determine the costs of reaching each free
patch around the robot. The cost function C for a
free patch P is given as:
C (P) =N (P) (1)
Where N (P) is a function that computes the number
of free neighbouring patches around patch P. A
visualization of the evaluation is given in Figure 1.
After evaluating the cost for all free patches around
the robot, the robot moves to the patch with the
lowest cost that has the lowest number of neighbours
and which is therefore most unlikely to be reached
again in the future
(Manolov, 2003).
Obstacle
Obstacle
Wa ll
C(P)=2
C(P)=3C(P)=1
C(P)=2
C(P)=4
C(P)=2
C(P)=1
C(P)=3
C(P)=2
C(P)=1
C(P)=1
D2
2
S
D1
1
C(P)=2
()
2
2
)12(12
YYxxD
−+−=
Wall
Explored
Wa ll
Wa ll
Wa ll
Wa ll
Explored
Explored
Wall
Wa ll
Wa ll
Wa ll
Explored
ExploredExplored
Explored
Explored
Explored
Explored
Status=
Status=
0
0
Unexplored
Unexplored
11
ExploredExplored
22
WallWall
Obstacle
Obstacle
Obstacle
Obstacle
Wa ll
C(P)=2
C(P)=3C(P)=1
C(P)=2
C(P)=4
C(P)=2
C(P)=3C(P)=1
C(P)=2
C(P)=4
C(P)=2
C(P)=1
C(P)=3
C(P)=2
C(P)=1
C(P)=1
D2
2
S
D1
1
C(P)=2
()
2
2
)12(12
YYxxD
−+−=
Wall
Explored
Wa ll
Wa ll
Wa ll
Wa ll
Explored
Explored
Wall
Wa ll
Wa ll
Wa ll
Explored
ExploredExplored
Explored
Explored
Explored
Explored
Status=
Status=
0
0
Unexplored
Unexplored
11
ExploredExplored
22
WallWall
Status=
Status=
0
0
Unexplored
Unexplored
11
ExploredExplored
22
WallWall
Figure 1: The algorithm determines for each free patch
around the robot the costs C to reach it. The costs of all
neighboring patches are different. Two patches have the
same cost. The distance between the robot and the
neighboring patches which have the same minimum costs
(patch 1 and patch 2).
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
172
However, it is possible that there exist more than
one patch with the same minimum cost. To solve
this problem, we improve the algorithm by taking
also into consideration the distance between the
robot and each one of these patches, and then select
the patch with minimum distance. Figure 1
illustrates the aforementioned situation.
4 THE MODIFIED LOCAL
NAVIGATION ALGORITHM
(MLNA)
LNA has a draw back that it can’t ensure
completeness in the case of a robot being trapped,
e.g. when all of its neighbors are either obstacles or
explored, and there is no free cell around to compute
its cost. In this situation, it will simply stop and fails
to complete exploring the whole environment as
illustrated in Figure 2a.
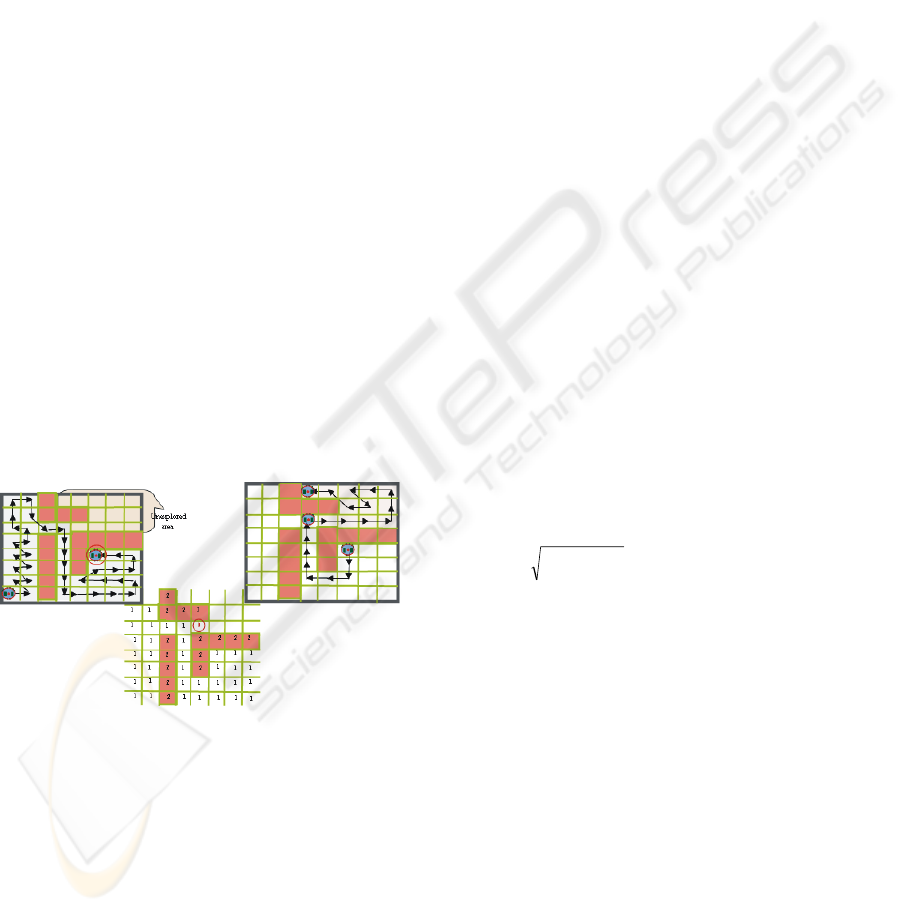
We modified the algorithm to overcome this
problem by calculating the shortest path to reach the
unexplored area and continue exploring the
environment. Our modified algorithm will determine
the cost for reaching all the un-explored cells. We
use the occupancy grid map in our algorithm to
describe the environment. As illustrated in Figure 2b
a cell can be in one of the following states which are
represented by an integer number:
(a) (b) (c)
Figure 2: (a) the trapped robots Problem in LNA. (b) The
map associated to the environment. (c) The shortest path
that the robot follows to reach to the unexplored area and
complete the exploration task.
Unexplored (0). No robot has been in the cell yet.
As shown in Figure 2b, the cell with state 0 is
detected by Khepera sensors as an unexplored free
cell.
Explored (1). The cell has been traversed at least
once by the robot, but it might need to go through it
again in order to reach unexplored regions. It also
means that the cell is free.
Wall (2). The cell cannot be traversed by the robot
because it is blocked by an obstacle or a wall.
We had to differentiate between the explored cells
that contain an obstacle and the explored cells that
are empty, in order to be able to identify the back
path of the robot successfully if required.
4.1 Cost of Reaching a Target Location
To determine the cost of reaching the Frontier cells,
which are the cells between known and unknown
areas, we compute the optimal path from the current
position of the robot to these cells based on a
deterministic variant of the value iteration (Eq. (3)).
In the following, c
x,y
corresponds to the x-th cell in
the direction of the x-axis and the y-th cell in
direction of the y-axis of the two-dimensional
occupancy grid map. In our approach, the cost for
traversing a grid cell c
x,y
is proportional to its
occupancy value p(c
x,y
). The minimum cost path is
computed using the following two steps:
1. Initialization. The grid cell that contains the
robot location is initialized with 0, all others
with∞.
(2)
2. Update Loop. For all grid cells C
x,y
do:
(3)
Where occ
max
is the maximum occupancy
probability value of a grid cell the robot is allowed
to traverse. This technique updates the value of all
grid cells by the value of their best neighbours, plus
the cost of moving to this neighbour. Here, cost is
equivalent to the probability p(c
x,y
) that a grid cell
c
x,y
is occupied times the distance to the cell. The
update rule is repeated until convergence. Then each
value T
x,y
corresponds to the cumulative cost of
moving from the current position of the robot to c
x,y
.
The convergence of the algorithm is guaranteed as
long as the cost for traversing a cell is not negative
and the environment is bounded. Both criteria are
fulfilled in our approach.
robottheofpositiontheisyxif
otherwiseyx
T
),(,0
,,
{
∞
=
]
max
,0[)
,
(}1,0,1{,|
)
,
(.
22
,
{min
,
occ
yyxx
CPyx
yyxx
CPyx
yyxx
T
yx
T
∈
Δ+Δ+
∧−∈ΔΔ
Δ+Δ+
Δ+Δ
+
Δ+Δ+
=
MODIFIED LOCAL NAVIGATION STRATEGY FOR UNKNOWN ENVIRONMENT EXPLORATION
173

The resulting cost function T can also be used to
efficiently derive the minimum cost path from the
current location of the robot to arbitrary goal
positions c
x,y
. This can be done by steepest descent
in T, starting at c
x,y.
As shown in Figure 2c the
algorithm will calculate the shortest path to the
unexplored cell. As soon as the robot reaches this
cell, it will complete exploring the environment
using the cost equation (1).
5 EXPERIMENT USING THE
MINI-ROBOT KHEPERA
To test the implemented exploration algorithm with
real robot, we use the Teleworkbench. We built the
environment on one small field (1 meter x 1 meter).
We use Lego bricks to form the environment. As the
robot platform we use mini-robot Khepera II
http://www.k-team.com. Its dimension is 5 cm in
diameter with one on-board microcontroller. The
robot’s base module is equipped with eight infrared
sensors. The maximum detection range using the
Khepera II basic setting. Up to 7cm distance. One of
the advantages of this robot is that it is extensible,
which means that diverse auxiliary modules can be
added on top of it. To allow longer runtime and
wireless communication, we extend the robot with
our extension module consisting of an additional,
battery and a Bluetooth chip. With this module, the
robot can operate up to 3 hours continuously.
5.1 Teleworkbench
The Teleworkbench is a teleoperated platform and
test bed for managing experiments using mini-robots
(Tanoto, 2005). The system is accessible via the
Internet. Through the web-based user interface, local
or remote users can schedule experiments and set
programs to be downloaded to each individual robot.
Via a Bluetooth module, robots can exchange
messages to each other or to the Teleworkbench
Server wirelessly. During experiments, the video
server tracks the robots on the field to provide
position and orientation of the robots. In parallel,
this data will be stored locally and streamed
simultaneously as live-video via the Internet.
For experiment analysis purpose, we developed a
graphical analysis tool based on the MPEG-4 video
standard (Tanoto, 2006). This tool allows us to
visualize the internal and external behaviour of
robots. With this tool, the recorded video of the
experiment can be displayed together with some
computer-generated objects representing important
information, e.g. robot path, sensors’ value, or
exchanged messages. Moreover, users can
interactively control the appearance of those objects
during runtime. The Teleworkbench can use
different types of mini-robots, such as Khepera II, as
its robotic platform.
5.2 Algorithm Implementation
Based on the aforementioned algorithm, we develop
the robot program in C language. The goal of the
experiment is to explore an unknown bounded-
environment of size 1 meter square. We divided the
environment into 8 x 8 patches, each of which has a
dimension of 0.125 x 0.125 m
2
as shown in Figure
3c. To detect obstacles or walls and their distance
relative to the robot, we use robot’s on-board
infrared sensors. Thus, if an object is detected, the
robot marks the patch with the object as occupied.
Moreover, the robot gets its position by using
odometry.
5.3 Experiment Setup and Execution
After code compilation, we download the program
remotely via the Teleworkbench web-based user
interface. During testing, we ran several experiments
with different parameters, such as varying the
threshold for the infrared sensors, etc. this is needed
due to hardware unideality that is not taken into
account during simulation. We did each experiment
as follows: select a robot, download the program,
turn on the webcam in record mode, free the robot
after the experiment is over, and save the video data
and the log files to be used for analysis. After each
experiment, we ran the post experiment analysis tool
which will generate an MPEG-4 video with the
video of the experiment and the robot path as well as
some colour tiles representing the patches.
5.4 Experimental Result
Experiments had been executed with the same
environment setting and initial position. The result
shows that by using the LNA the robot could explore
all the free patches in the environment as shown in
Figure 3a. But if the environment appears as shown
in Figure 3b, the robot stops when it finds that all its
neighbours are either explored or wall. But when
applying the MLNA the robot could successfully
explore all the free patches in the environment.
Moreover, it could detect obstacles and walls
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
174
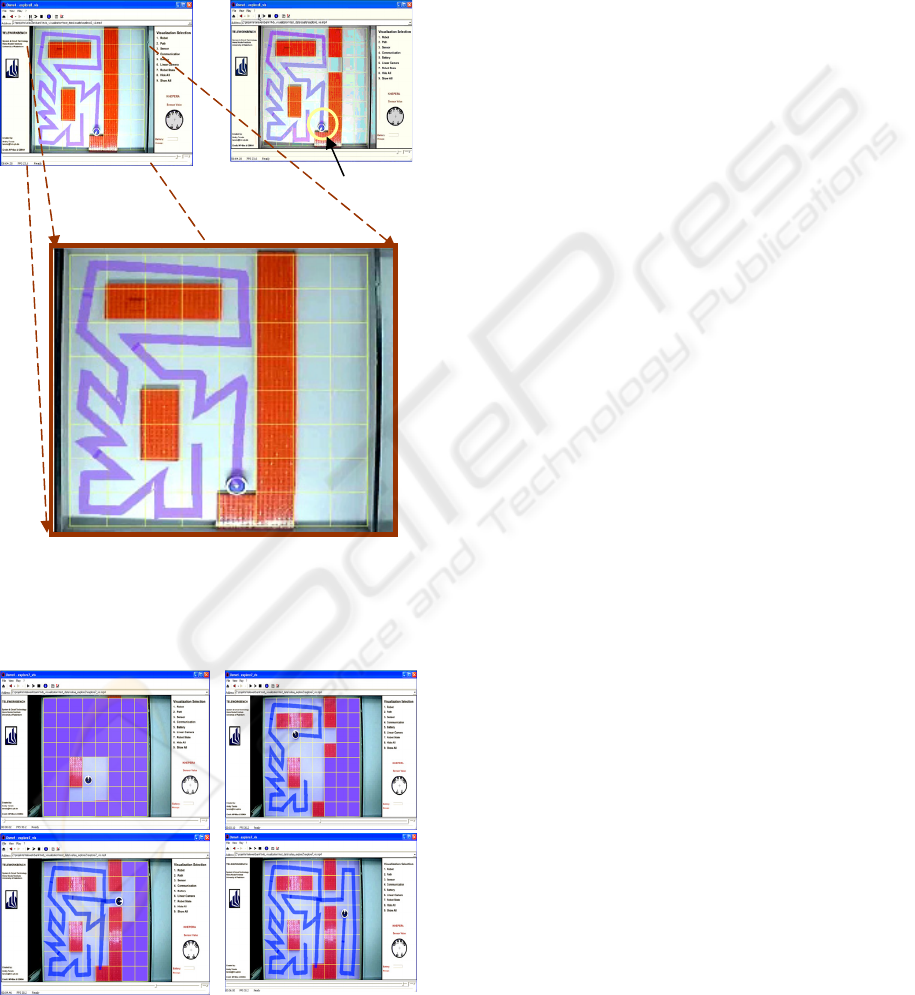
robustly by using only its on-board infrared sensors
as shown in right image in Figure 4.
The MPEG-4 video played-back on OSMO4
video player shows the path of the robot during the
experiment. If needed and available, other
information, such as sensors, internal state, etc, can
also be displayed.
Figure 3: (a) Snapshots of the video visualizing the
exploration experiment using LNA. (b) The trapped robot
problem in LNA. (c) Zooming on the environment
Figure 4: Snapshots of the video visualizing a step by step
exploration experiment of an unknown environment using
the MLNA.
However, we can see that the robot path deviates
when it travelled from one patch to the other, as
shown in Figure 3 and Figure 4. This is mainly due
to the error generated by odometry. As a result, in
some occasions the robot collided with obstacles or
walls during its movement. Another interesting point
from the experiment is that there is one occasion in
which the robot had to select one of two patches
with the same minimum cost (top-left image in
Figure 4). By using the distance calculation
(sec.4.1), the robot chose the patch exactly below it
because of its shorter relative distance to the current
robot position compared to the one of other cells.
6 CONCLUSIONS
In this work the modified local navigation strategy
for static unknown environment exploration has
been implemented and tested using the mini-robot
Khepera running on the Teleworkbench.
Experiments presented in this paper demonstrate that
the modified exploration algorithm is able to cover
successfully the whole unknown environment and
overcome the draw back in LNA. Moreover, by
taking into consideration the distance of
neighbouring cells to the current robot position, the
robot always select the cells with minimum distance,
thus less energy and time. We notice also the
weakness of odometry to provide the robot’s
position. To improve it, we plan to get more robust
position information from the Teleworkbench.
Moreover, varying environment setups and initial
locations are necessary to prove the robustness of
the algorithm.
ACKNOWLEDGEMENTS
This work is a result of common research between
the System and Circuit Technology, Heinz Nixdorf
Institute, University of Paderborn and Scientific
Computing Department, Faculty of Computer and
Information Sciences, Ain Shams University.
cultural department and study mission. This work
was partly supported by the Sixth Framework
Programme of the European Union as part of the
GUARDIANS project (no. 045269).
The robot stops here
(a)
(b)
(c)
MODIFIED LOCAL NAVIGATION STRATEGY FOR UNKNOWN ENVIRONMENT EXPLORATION
175

REFERENCES
Stachniss, C., 2006. Exploration and Mapping with
Mobile Robots. PhD Thesis, Albert-Ludwigs-
University, Freiburg, Germany.
Simmons, R., Apfelbaum, D., Burgard, W., Fox, D.,
Moors, M., Thrun, S., and ounes, H., 2000.
Coordination for multi-robot exploration and mapping.
In AAAINational Conference on Artificial Intelligence,
Austin, TX, USA.
Manolov, Ognyan; Iske, Burkhard; Noykov, Sv.; Klahold,
Jürgen; Georgiev, G.; Witkowski, Ulf; Rückert, Ulrich
. 2003. Gard - An Intelligent System for Distributed
Exploration of Landmine Fields Simulated by a Team
of Khepera Robots. In Proceedings of the
International Conference Automatics and Informatics,
Sofia, Bulgaria.
S. Amin, A.Tanoto, U. Witkowski, U. Rückert, M. S.
Abdel-Wahab, 2007. Environment Exploration Using
Mini-Robot Khepera, In Proceedings of the, 4
th
International Symposium on Autonomous Mini-robots
for Research and Edutainmen (AMiRE 2007), Buenos
Aires, Argentina.
Burgard, W., Fox, D., Moors, M., R. Simmons and Thrun.,
S., 2000. Collaborative Multi-Robot Exploration, In
Proc. Intl. Conf.on Robotics and Automation, San
Francisco.
Tanoto, A., Witkowski, U., Rueckert, U. (2005)
Teleworkbench: A Teleoperated Platform for Multi-
Robot Experiments, In Proceedings of the 3rd
International Symposium on Autonomous Mini-robots
for Research and Edutainment (AMiRE 2005), Fukui,
Japan.
Tanoto, A., Du, J., Kaulmann, L., Witkowski, U., 2006.
MPEG-4-Based Interactive Visualization as an
Analysis Tool for Experiments in Robotics, In
Proceeding of the 2006 International Conference on
Modeling, Simulation and Visualization Methods, Las
Vegas, USA.
Choset, H. Coverage for robitics - a survey of recent
results. 2001. Annals of Mathematics and Artifical
Intelligence.
Bourgoult, F, Makarenko, A, Williams, B, Grocholsky, B.,
and DurrantWhyte, F., 2002. Information based
adaptive robotic exploration. In Proc. of the IEEE/RSJ
Int. Conf. on Intelligent Robots and Systems (IROS).
Edlinger, T, and Puttkamer, E., 1994. Exploration of an
indoor-environment by an autonomous mobile robot.
In Proc. of the IEEE/RSJ Int. Conf. on Intelligent
Robots and Systems (IROS).
Yamauchi, B., Schultz, A. and Adams, W., 1999.
Integrating exploration and localization for mobile
robots. Adaptive Systems, 7(2).
Gonz´alez, H. Ba˜nos, H, and Latombe, J, 2001.
Navigation strategies for exploring indoor
environments. International Journal of Robotics
Research.
Moorehead, S, Simmons, R, and Whittaker, W., 2001.
Autonomous exploration using multiple sources of
information. In Proc. of the IEEE Int. Conf. on
Robotic.
Hans P. Moravec and Elfes, A., 1985. High resolution
maps from wide angle sonar. In Proc. IEEE Int. Conf.
Robotics and Automation.
Whaite, P and Ferri, F., 1997.Autonomous exploration:
Driven by uncertainty. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 19(3):193– 205
Tailor, C and Kriegman, D., 1993. Exloration strategies
for mobile robots. In Proc. of the IEEE Int. Conf. on
Robotics & Automation (ICRA), pages 248–253.
Dudek, G, Jenkin, M, Milios, E and Wilkes, D., 1991.
Robotic exploration as graph construction. IEEE
Transactions on Robotics and Automation, 7(6):859–865.
Koenig, S., Tovey, C., and Halliburton., W., 2001. Greedy
mapping of terrain. In Proc. Of the IEEE Int. Conf. on
Robotics & Automation (ICRA).
Makarenko, A., Williams, B., Bourgoult, ,F., and Durrant-
Whyte, F., 2002. An experiment in integrated
exploration. In Proc. of the IEEE/RSJ Int. Conf. on
Intelligent Robots and Systems (IROS), Lausanne,
Switzerland.
Stachniss, C., Hähnel, D., Burgard, W., and Grisetti, G.,
2005. On actively closing loops in grid-based
FastSLAM. Advanced Robotics.
Stachniss, C., and Burgard, W., 2005. Mobile robot
mapping and localization in nonstatic environments, In
Proc. of the National Conference on Artificial
Intelligence (AAAI),Pittsburgh, PA, USA.
Dissanayake, G., Newman,P., Clark, S., Durrant-Whyte,
F., and Csobra, M., 2001. A solution to the
simultaneous localization and map building (SLAM)
problem, IEEE Trans. on Robotics and Automation..
Choset, H., 2001. Topological simultaneous localization
and mapping (SLAM): Toward exact localization
without explicit localization. IEEE Transactionson
Robotics and Automation.
Moorehead, S., Simmons, R., and Whittaker,L., 2001.
Autonomous exploration using multiple sources of
information, In IEEE International Conference on
Robotics and Automation (ICRA ’01).
Stachniss, C, Burgard, W., 2003. Exploring unknown
environments with mobile robots using coverage
maps. In Proc. of the Int. Conf. on Artificial
Intelligence (IJCAI).
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
176
