
DYNAMIC-BASED SIMULATION FOR HUMANOID ROBOT
WALKING USING WALKING SUPPORT SYSTEM
Aiman Musa M. Omer, Yu Ogura, Hideki Kondo
Graduate School of Science and Engineering, Waseda University, Tokyo, Japan
Hun-ok Lim
Department of Mechanical Engineering, Kanagawa University, Yokohama, Japan
Atsuo Takanishi
Department of Mechanical Engineering/ Humanoid Robotics Institute, Waseda University, Tokyo, Japan
Keywords: Dynamic Simulation, Humanoid Robot, Biped robot, Walking Assist Machine.
Abstract: A new humanoid bipedal robot WABIAN-2R was developed to simulate human motion. WABAIN-2R is
able to perform similar human-like walking motion. Moreover, the robot is able to perform walking motions
with a passive walk-assist machine. However, walking with an active walk-assist machine is expected to be
unstable. Conducting this experiment is highly risky and costly. Therefore, we had developed a dynamic
simulator in order to test walking robot with walk-assist machine before conducting it in real simulation.
1 INTRODUCTION
With the rapid aging of society in recent times, the
number of people with limb disabilities is increasing.
According to the research by the Health, Labour and
Welfare Ministry, Japan, there are around 1,749,000
people with limb disabilities; this accounts for more
than half of the total number of disabled people
(3,245,000 handicapped people) (Health). The
majority of these people suffer from lower-limb
disabilities. Therefore, the demands for establishing
a human walking model that can be adapted to
clinical medical treatment are increasing. Moreover,
this model is required for facilitating the
development of rehabilitation and medical welfare
instruments such as walking machines for assistance
or training (Figure 1(a)). However, experiments that
are carried out to estimate the effectiveness of such
machines by the elderly or handicapped could result
in serious bodily injury.
Many research groups have been studying biped
humanoid robots in order to realize the robots that
can coexist with humans and perform a variety of
tasks. For examples, a research group of HONDA
has developed the humanoid robots—P2, P3, and
ASIMO (Sakagami et. al, 2002).
(a) by human (b) by robot
Figure 1: Walk-assist machine.
The Japanese National Institute of Advanced
Industrial Science and Technology (AIST) and
Kawada Industries, Inc. have developed HRP-2P.
The University of Tokyo developed H6 and H7, and
the Technical University of Munich developed
Johnnie. Waseda University developed the
23
Musa M. Omer A., Ogura Y., Kondo H., Lim H. and Takanishi A. (2008).
DYNAMIC-BASED SIMULATION FOR HUMANOID ROBOT WALKING USING WALKING SUPPORT SYSTEM.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 23-28
DOI: 10.5220/0001482100230028
Copyright
c
SciTePress

WABIAN series that realized various walking
motions by using moment compensation. Korea
Advanced Institute of Science and Technology
(KAIST) also developed a 41-DOF humanoid
robot— KHR-2 (Omer et. al, 2005).
The above mentioned human-size biped robots
achieved dynamic walking. If these humanoid robots
can use rehabilitation or welfare instruments as
shown in Figure 1(b), they will be able to help in
testing such instruments quantitatively. The main
advantages of the human simulator can be
considered to be as follows: (1) The measurement of
the angle and the torque required at each joint can be
measured easily and quantitatively as compared to
the corresponding values in the case of a human
measurement. (2) Experiments using such robots can
help identify leg defects of a human from an
engineering point of view. (3) A robot can replace
humans as experimental subjects in various
dangerous situations: experiments involving the
possibility of falling, tests with incomplete prototype
instruments, simulations of paralytic walks with
temporarily locked joints.
Such experiments require a humanoid robot that
enables it to closely replicate a human. However,
humans have more redundant DOFs than
conventional biped humanoid robots; this feature
enables them to achieve various motions. Therefore,
a DOF configuration that is necessary to reproduce
such motions is one of the very important issues in
the development of a humanoid robot (Ogura et. al,
2006).
The Waseda Bipedal Humanoid Robot
WABIAN-2R has been developed to simulate
human motion. WABIAN-2R performed human-like
walking motions (Figure 2). Moreover, WABIAN-
2R achieved to perform walking motion using walk-
assist machine. However, the walk-assist machine
was freely rolling without activating its wheels
motors. In this case, the robot faced the minimum
resistance or disturbance case by the walk-assist
machine. On the other hand, activating the walk-
assist machine may create a large disturbance for
robot due to separate control for each of them.
Conducting this experiment may be highly risky.
As we develop humanoid robot to coexist in the
human environment, we need to conduct many
experiments such as robot walking on uneven
surface, climbing the stairs, and robot interact with
other machine and instruments. Doing any new type
of experiment using WABIAN-2 might be risky.
Figure 2: WABIAN-2R.
Therefore, we need find a safer method for initial
experimental testing. Using a dynamic simulation is
useful method due to some reasons such as: (1) It is
safer in terms of cost and risk. (2) It is easy to
monitor and view motion outputs. (3) It can show
the variation cased by any external disturbances. In
this paper, a dynamic simulator is described, which
is able to easily simulate any new type of walking.
Using the dynamic simulator, we can monitor the
motion performance and output all needed data that
is useful for further development. This paper is
aimed to simulate the walking motions of
WABIAN-2 using walk-assist machine.
2 DYNAMIC SIMULATION
Dynamic simulation could be used to simulate the
dynamic motion of a mechanical structured model. It
can analyze the effects of the surrounding
environment on the mechanisms and objects. In
robotics researches, simulation software are used for
robotic simulation. There are many software used
for robotics simulation in different applications.
Most of those software are for industrial robot
applications. However, there are some software used
for mobile robot simulation. For examples,
RoboWorks, SD/FAST, OpenHRP, and Yobotics are
used for mobile and legged robot simulation.
Webots is high and advanced simulation software
used in Robotics simulation. It is use for prototyping
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
24

and simulation of mobile robots. It has many
advanced functions and techniques. Webots is very
easy to use and implement. Therefore, we choose it
as simulation software (Webots).
2.1 Modeling
In order to develop a dynamic simulation, we need
to go through several steps. First is modeling where
we set up the simulation environment and initial
parameters. We set up a full structure of WABIAN-2,
based on the specifications (size, shape, mass
distribution, friction, .etc) of components of
WABIAN-2 (Figure 3).
Figure 3: Modeled WABIAN-2R in the simulation world.
2.2 Controlling
Second is controlling, which identifies simulation
objects and controls the simulation procedures. The
controller is some how similar to the WABIAN-2R
control. It gets the input data from the CSV pattern
file, and sets the position angle of each joint through
inverse kinematics techniques. Moreover, the
controller sets the simulate time step and the
measurement of data.
2.3 Running
Lastly is the running of the simulation and checking
the dynamic motion. We can view the simulation
from different view sides which gives us a clear idea
about the simulation performance. Moreover, most
of the needed data could be measured through
several functions.
3 WALKING WITH WALKING
ASSIST MACHINE
WABIAN-2 performed some walking experiments
using walking assist machine. The performance was
conducted by leaning its arms on the walking assist
machine holder. The walking assist machine moves
passively without generating its own motion. The
robot was able to walk and push the walking assist
machine forward. The experiments were conducted
with different walking styles and different heights of
arm rest.
The walking performance of WABIAN-2 using
an active walking assist machine, expected to be
unstable. The walk-assist machine has its own
control system, not connected to WABIAN-2 control
system. The walking assist machine moves with
constant velocity in a forward direction, while the
robot moves by setting its position. The robot arms
may displace from its position on the arm rest of the
machine which will case external forces on
WABIAN-2. In order to stabilize the walking, the
external force has to be minimized.
Figure 4: WABIAN-2 with Walking Assist Machine.
DYNAMIC-BASED SIMULATION FOR HUMANOID ROBOT WALKING USING WALKING SUPPORT SYSTEM
25
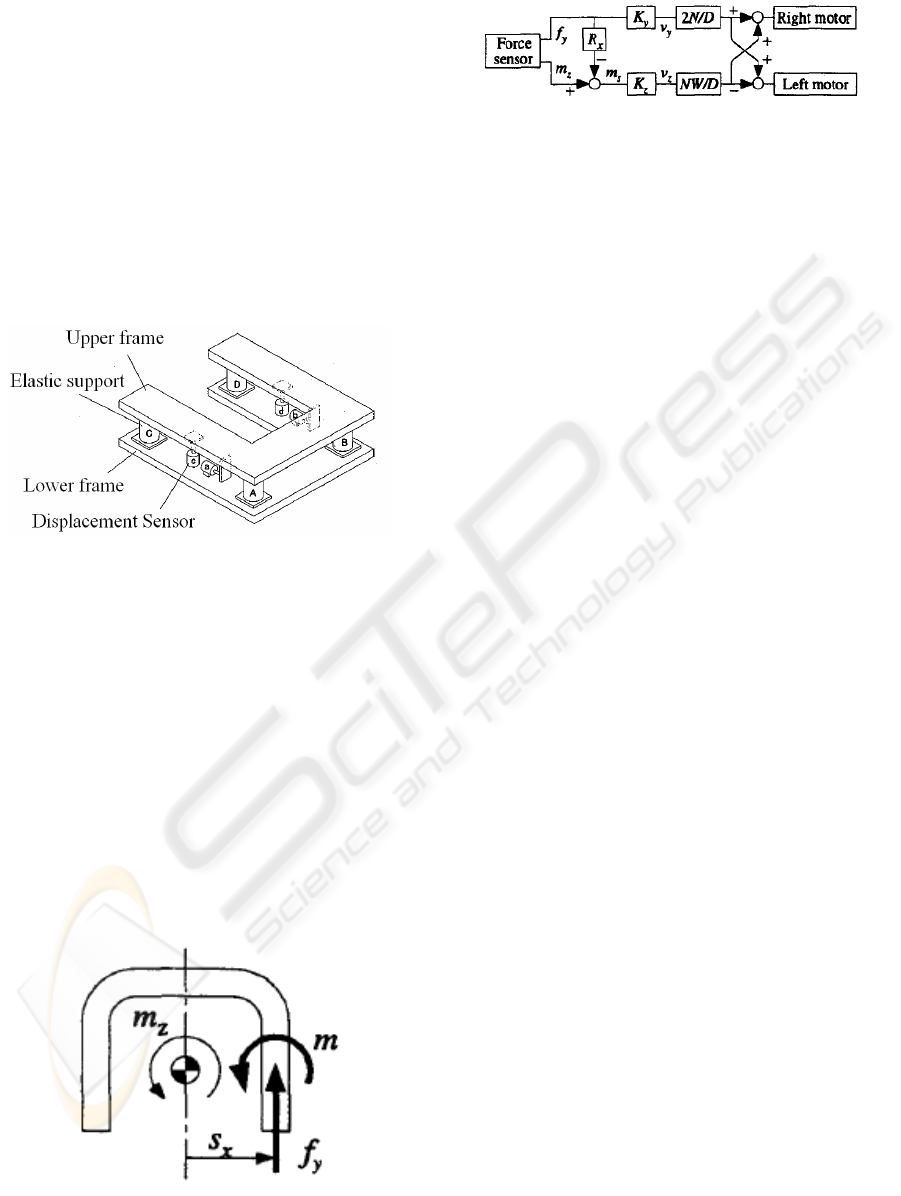
3.1 Force Sensor
The real walking assist machine is developed to
sense the force applied by the load on the arm rest.
A force sensor is attached on the top of the arm rest
consisting of four displacement sensors. The
displacement sensor is simply a spring mechanism.
It senses forward and vertical forces and turns toque
by determining relative displacements between the
upper frame and the lower one (Figure 5). We can
develop the system that can adjust the velocity of the
walking assist machine in order to minimize the
displacement.
Figure 5: Force Sensor.
3.2 Velocity Control
There were some developments made on the
walking assist machine control system to adjust its
speed according to the force applied on the arm rest
(Egawa et. al, 1999). The arm rest is designed to
measure the force and torques applied by the user of
the machine (Figure 6). The controller uses those
measure data as an input data to set the velocity of
each motor of the machine (Figure 7). The force f
y
and the turning moment m which applied by the arm
of the user is calculated in the sensor by the
following equations:
m
z
= m + s
x
f
y
(1)
Figure 6: Force and Moment Applied to Arm rest.
Figure 7: Block Diagram for Control System.
where m
z
is the moment measured by the sensor, s
x
the distance shifted from the arm position to the
sensor position. The values for m
z
and f
y
are the
input data for the controller that set the velocity of
each wheel motor (Egawa et. al, 1999).
In this study, we have introduced a new control
system model that controls the velocity of the
walking assist machine. The system adjusts the
velocity according to the force measured by the
force sensor. The new adjusted velocity is based on
current velocity and the displacement with
WABIAN-2.
Developing the equations of the modeled system, we
can have the following equation:
F
y
= ma (2)
where m is the total mass of the walking assist
machine, a is the acceleration, and F
y
is the force
measured by the spring. The force is the result of
displacement of the spring mechanism, which can be
expressed as
F
y
= Cx (3)
where C is the spring constant and x is the amount of
displacement. Substitute equation (3) in (2), we will
have
a = (C/m) x (4)
the acceleration is the derivative of velocity.
Approximately, it is equal to the difference in
velocity over step, which could be express as
a(t) = (v (t + ∆t) – v (t)) / ∆t (5)
since we are dealing with discrete time, we can
rearrange equation (5) to
a(k) = (v(k+1) – v(k)) / T (6)
where v(k) is the current velocity, v(k+1) is the next
velocity, and T is the step time. Substitute equation
(4) in (6), we will have
v (k+1) = (C T /m) x(k) + v(k) (7)
where x(k) refer to the displacement measured by
the spring of the sensor. This equation represents the
velocity control process in the system.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
26
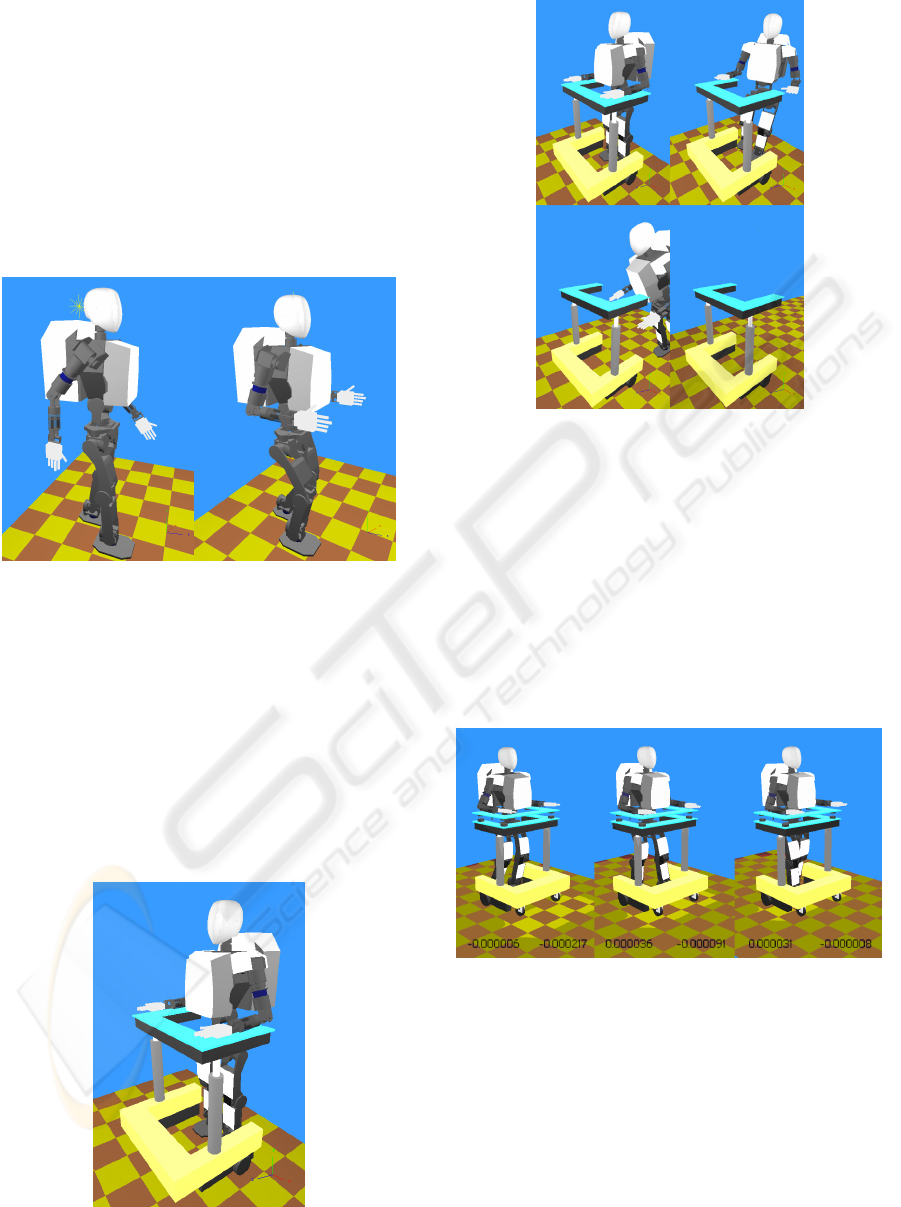
4 SIMULATION RESULT
We test several types of motions performed by
WABIAN-2. The simulator simulates the walking
performance of conventional walking and stretch
walking (Figure 8). Moreover, it simulates some
other motions as the input pattern. The dynamic
simulation has given us a simulation motion just like
the real simulation. We monitor the simulation from
different viewpoints. Moreover, we could measure
some output data.
Figure 8: Simulation of different type of walking.
We conducted some simulation experiments of
walking using the walking assist machine. The robot
is able to walk stably with a passive walking assist
machine just like the real experiment (Figure 9). But
it was not possible to achieve the same result when
we conducted the experiment using an active
walking assist. As expected, the robot was affected
by the external force produced by its contact with
the walking assist machine. The robot became
unstable during its walking, and in some
experiments it fell down (Figure 10).
Figure 9: Simulation of walking with walk-assist machine.
Figure 10: Simulation of walking with active walking
machine.
By adding the force sensor to the simulated
walking assist machine, we were able to measure the
amount of external force acting on the robot. Using
these measurements with the velocity control we had
developed, the robot could walk with the active
walking assist machine. The amount of holding
torque we set to the walking assist machine wheels
could increase from 0.5 N.m to 0.75 N.m by using
this new velocity control in the control system of the
dynamic simulator we had developed (Figure 11).
Figure 11: Simulation of walking with the walking
machine using velocity control.
5 CONCLUSIONS AND FUTURE
WORK
This paper describes the simulation of walking by
WABIAN-2R with the walking assist machine. The
dynamic simulation is very important to check the
motion of any new pattern generated. Using the
dynamic simulation we can see the effect of the
DYNAMIC-BASED SIMULATION FOR HUMANOID ROBOT WALKING USING WALKING SUPPORT SYSTEM
27

walking assist on WABIAN-2R. As expected, the
walking was unstable due to the effect of external
forces created from the arm rest. By using the
velocity control in the control system of the
simulation, the robot is able to walk stably with the
walking assist machine.
In the near future, it is important to develop
WABIAN-2R system to be stabilized during
walking. The stabilization control will be based on
Zero Moment Point. Moreover, it is necessary to
develop the robot to interact with other objects and
equipments. This will make the robot can interact
with its surrounding environment.
REFERENCES
Health, Labour and Welfare Ministry of Japan. http://
www.mhlw.go.jp/english/wp/wphw/vol1/p2c4s2.h-tml.
The current situation of people with disabilities.
Y. Sakagami, R. Watanabe, C. Aoyama, S. Matsunaga, N.
Higaki, and K.Fujimura, “The intelligent ASIMO:
System overview and integration,” Proc. IEEE/RSJ Int.
Conference on Intelligent Robots and Systems,
pp.2478-2483, 2002.
Aiman Musa M. Omer, Yu Ogura, Hideki Kondo,
Akitoshi Morishima, Giuseppe Carbone, Marco
Ceccarelli, Hun-ok Lim, and Atsuo Takanishi.
Development of a Humanoid Robot Having 2-DOF
Waist and 2-DOF Trunk. Humanoid2005 Conference,
Tsukuba- December 2005.
Yu Ogura, Hiroyuki Aikawa, Kazushi Shimomura, Hideki
Kondo, Akitoshi Morishima, Hun-ok Lim, and Atsuo
Takanishi. Development of a New Humanoid Robot
WABIAN-2. Proceedings of the 2006 IEEE
International Conference on Robotics and Automation
Orlando, Florida - May 2006.
Webots. http://www.cyberbotics.com. Commercial Mobile
Robot Simulation Software.
S. Mojon. Realization of a Physic Simulation for a Biped
Robot. Semester Project at BIRG laboratory Swiss
Federal Institute of Technology, Summer 2003.
S. Egawa, Y. Nemoto, M. G. Fujie, A. Koseki, S. Hattori,
T. Ishii S. Egawa, Y. Nemoto, M. G. Fujie. Power-
Assisted Walking Support System with Imbalance
Compensation Control for Hemiplegics. Proceedings
of the Rrst Joint BMES/EMBS Conference Serving
Humanity, Advancing Technology o& 1&16, 99,
Athn$, GA, USA.
Saku Egawa, Ikuo Takeuchi, Atsushi Koseki, Takeshi
ISHI. Force-sensing Device for Power-assisted
Walking Support System. System Integration
Conference, December 2002.
P. E. Klopsteg and P. D. Wilson et al., Human Limbs and
Their Substitutes, New York Hafner, 1963.
F. Kanehiro, K. Fujiwara, S. Kajita, K. Yokoi, K. Kaneko,
H. Hirukawa, Y. Nakamura, K. Yamane. Open
Architecture Humanoid Robotics Platform. ICRA ’02.
IEEE International Conference on, Volume: 1, 11-15
May 2002 Robotics and Automation, 2002.
Proceedings.
Philippe Sardain and Guy Bessonnet. Force Acting on a
Biped Robot Center of Pressure-Zero Moment Point.
IEEE Transactions on Systrems, Man, and
Cybernetics-Part A: Systems and Humans, Vol. 34,
NO. 5, September 2004.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
28
