
HYBRID MATCHING OF UNCALIBRATED OMNIDIRECTIONAL
AND PERSPECTIVE IMAGES
Luis Puig, J. J. Guerrero
DIIS-I3A, University of Zaragoza, Zaragoza, Spain
Peter Sturm
INRIA Rh
ˆ
one-Alpes, Montbonnot, France
Keywords:
Computer vision, matching omnidirectional images, hybrid epipolar geometry.
Abstract:
This work presents an automatic hybrid matching of central catadioptric and perspective images. It is based
on the hybrid epipolar geometry. The goal is to obtain correspondences between an omnidirectional image
and a conventional perspective image taken from different points of view. Mixing both kind of images has
multiple applications, since an omnidirectional image captures many information and perspective images are
the simplest way of acquisition. Scale invariant features with a simple unwrapping are considered to help
the initial putative matching. Then a robust technique gives an estimation of the hybrid fundamental matrix,
to avoid outliers. Experimental results with real image pairs show the feasibility of that hybrid and difficult
matching problem.
1 INTRODUCTION
Recently, a number of catadioptric camera designs
have appeared. The catadioptric cameras combine
lenses and mirrors to capture a wide, often panoramic
field of view. It is advantageous to capture a wide
field of view for the following reasons. First, a wide
field of view eases the search for correspondences as
the corresponding points do not disappear from the
images so often. Second, a wide field of view helps
to stabilize egomotion estimation algorithms, so that
the rotation of the camera can be easily distinguished
from its translation. Last but not least, almost com-
plete reconstructions of a surrounding scene can be
obtained from two panoramic images (Svoboda and
Pajdla, 2002).
A hybrid image matching is a system capable of
establish a relation between two or more images com-
ing from different camera types. The combination of
omnidirectional and perspective images is important
in the sense of that a single omnidirectional image
contains more complete description of the object or
place it represents than a perspective image thanks to
its wide field of view and its ability to unfold objects.
In general if we want to establish a relation be-
tween two or more views obtained from different
cameras, they must have a common representation
where they can be compared. We face this problem
when we want to match omnidirectional images with
perspective ones. Few authors have dealt with this
problem and they followed different strategies. In
(Menem and Pajdla, 2004) Pl
¨
ucker coordinates are
used to map ℘
2
into ℘
5
where lines and conics are
represented in 6-vectors and a geometrical relation
can be established. A change of feature space is in-
troduced in (Chen and Yang, 2005). The perspec-
tive image is partitioned into patches and then each
patch is registered in the Haar feature space. These
approaches have a major drawback, they require in-
formation about the geometry of the particular mirror
used to get the images, which in most cases is not
available. Besides they perform hard transformations
over the image.
Another approach to deal with this problem is to
establish a geometric relation between the images.
Sturm (Sturm, 2002) develops this type of relation be-
tween multiple views of a static scene, where these
views are obtained from para-catadioptric and per-
spective cameras.
We propose to explore a way to overcome these
drawbacks avoiding the use of the so complex geo-
metry of the mirror and the formulation of a geomet-
125
Puig L., J. Guerrero J. and Sturm P. (2008).
HYBRID MATCHING OF UNCALIBRATED OMNIDIRECTIONAL AND PERSPECTIVE IMAGES.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 125-128
DOI: 10.5220/0001494901250128
Copyright
c
SciTePress

ric model. We present an automatic hybrid matching
approach with uncalibrated images using the hybrid
epipolar geometry to establish a relation between om-
nidirectional and perspective images.
2 HYBRID IMAGE MATCHING
USING EPIPOLAR GEOMETRY
To deal with the problem of the robust hybrid match-
ing a common strategy is to establish a geometrical re-
lation between the views of the 3D scene. We have se-
lected a strategy that does not require any information
about the mirror. A geometrical approach which en-
capsulates the projective geometry between two views
is used. Epipolar geometry (EG) is the intrinsic pro-
jective geometry between two views. It is indepen-
dent of the scene structure, and only depends on the
cameras’ internal parameters and relative pose (Hart-
ley and Zisserman, 2000). This approach needs pairs
of putative corresponding points between the views.
In this work we use the SIFT descriptor (Lowe, 2004).
Sturm proposes a hybrid epipolar geometry, where
a point in the perspective image is mapped to its corre-
sponding epipolar conic in the omnidirectional image.
Recently Barreto and Daniliidis (Barreto and Dani-
ilidis, 2006) have exposed a more general scheme
where they compare the mixture of central cameras,
including pin-hole, hyperbolic and parabolic mirrors
in catadioptric systems and perspective cameras with
radial distortion.
The fundamental matrix F encapsulates the epipo-
lar geometry. The dimension of this matrix depends
on the image types we want to match. In the hybrid
case we have two options, a 4 × 3 matrix in the case of
para-catadioptric and perspective cameras or 6 × 3 in
the case of hyperbolic mirror and perspective cameras
in a catadioptric system. In (Barreto and Daniilidis,
2006) for this last case a 6 × 6 matrix is considered,
which can result in a very difficult corresponding es-
timation problem.
2.1 EG with Perspective and
Catadioptric Cameras
In general the relation between omnidirectional and
perspective images with the fundamental matrix can
be established by
ˆ
q
T
c
F
cp
q
p
= 0 (1)
subscripts p and c denote perspective and catadioptric
respectively.
From Eq.1 with known corresponding points bet-
ween the two images, we can derive the hybrid fun-
damental matrix. Points in the perspective image are
defined in common homogeneous coordinates. Points
in the omnidirectional image are defined depending
on the shape of the epipolar conic. The general repre-
sentation for any shape of epipolar conic is a 6-vector.
A special case where the shape of the conic is a circle
the coordinate vector has four elements. These repre-
sentations are called the “lifted coordinates” of a point
in the omnidirectional image.
In the hybrid epipolar geometry points in the
perspective image are mapped to its corresponding
epipolar conic in the omnidirectional image. Conics
can be represented in homogeneous coordinates as the
product
ˆ
q
T
c = 0, where
ˆ
q
T
represents the lifted coor-
dinates of the omnifirectional point q. In this work
we have two representations for this point, one of
them is the general homogeneus form of a conic, a
6-vector
ˆ
q = (q
2
1
, q
2
2
, q
2
3
, q
1
q
2
, q
1
q
3
, q
2
q
3
)
T
. The other
one constraints the shape of the conic to be a circle
ˆ
q = (q
2
1
+ q
2
2
, q
1
q
3
, q
2
q
3
, q
2
3
)
T
. These representations
are called the “lifted coordinates” of the omnidirec-
tional point q.
If the point in the omnidirectional image is repre-
sented with a 6-vector lifted coordinates
ˆ
q, the fun-
damental matrix is 6 × 3 (F63) in such a way that
c ∼ F
cp
q
p
. When the 4-vector lifted coordinates is
used the fundamental matrix is 4 × 3 and the conic
(circle) is obtained by the same product c ∼ F
cp
q
p
.
2.2 Computation of the Hybrid
Fundamental Matrix
The algorithm used to compute the fundamental ma-
trix is similar to the 8-point algorithm (Hartley and
Zisserman, 2000) for the purely perspective case, with
the difference that the points in the omnidirectional
images are given in lifted coordinates.
The automatic computation of the fundamental
matrix is summarized as follows:
1. Initial Matching. Scale invariant features are ex-
tracted in each image and matched based on their
intensity neighborhood.
2. RANSAC Robust Estimation. Repeat for n sam-
ples, where n is determined adaptively:
(a) Select a random sample of k corresponding
points, where k depends on what model we are
using (if F43, k = 11 or if F63, k = 17)
1
. Com-
pute the hybrid fundamental matrix F
cp
as de-
scribed above.
1
Matrices are up to scale, so we need the number of ele-
ments of the matrix minus one corresponding points.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
126

(b) Compute the distance d for each putative cor-
respondence, d is the geometric distance from
a point to its corresponding epipolar conic
(Sturm and Gargallo, 2007).
(c) Compute the number of inliers consistent with
F
cp
by the number of correspondences for
which d < t pixels.
Choose the F
cp
with the largest number of inliers.
The F
cp
is used to eliminate outliers which are
those point correspondences for which d > t.
3 HYBRID EG EXPERIMENTS
In this section we present experiments performed with
real images obtained from two different omnidirec-
tional cameras. The first one is a model composed by
an unknown shape mirror and a perspective camera.
The second one is composed by a hyperbolic mirror
and a perspective camera.
The purpose of this experiment is to show the
performance of this approach to compute the hybrid
epipolar geometry in real images. We use 40 manu-
ally selected corresponding points to compute it. In
order to measure the performance of F we calculate
the geometric error from each point to its correspond-
ing epipolar conic. Fig.1(a) shows the epipolar con-
ics computed with the F43 matrix using the unknown
shape mirror. Fig. 1(b) shows the epipolar conics
computed with the F63 matrix using the hyperbolic
mirror. The mean of distances from the points to
their corresponding epipolar conics are 2.07 pixels
and 0.95 pixels respectively.
(a) Experiment with the unknown shape mirror using F43.
(b) Experiment with the hyperbolic using F63.
Figure 1: Experiments with real images using both mirrors
and both hybrid fundamental matrices.
(a) (b)
(c) (d)
Figure 2: Set of images used to test the automatic approach.
(a) Omnidirectional image. (b) An image cut from (a). (c)
Perspective1 image. (d) Perspective2 image.
4 AUTOMATIC MATCHING
In this section we present some experiments perform-
ing automatically the matching between an omnidi-
rectional and a perspective image. There exist ap-
proaches matching automatically omnidirectional im-
ages using scale invariant features (Murillo et al.,
2007) which demonstrate a good performance, but it
does not work with hybrid matching. An easy way to
transform an omnidirectional image into a common
environment with the perspective one is to unwrap the
omnidirectional image, which consists in a mapping
from Cartesian to polar coordinates.
The initial matching between the perspective and
the unwrapped omnidirectional image has a consid-
erable amount of inliers but also a majority of out-
liers. This scenario is ideal to use a technique like
RANSAC where we have a set of possible correspon-
dences of points useful to compute the hybrid epipolar
geometry.
One omnidirectional image, a part of it and two
perspective images, all of them uncalibrated, are used
to perform the following experiment. We use the al-
gorithm explained in section 2.2. Table 1 summarizes
the results of this experiments giving the quantity of
inliers and outliers in the initial and the robust match-
ing. For example, in Experiment 1 we use images
Fig.2(a) and Fig.2(c). The initial matching gives a
35% of inliers. After applying the robust estimation
we obtain a 80% of inliers. Notice that just 2 inliers
have been eliminated. Fig. 3 shows the final matches.
The results show that the epipolar geometry elim-
inates most of the outliers. For practical reasons in
the estimation problem, we use the F43, the simplest
model of the hybrid epipolar fundamental matrix.
HYBRID MATCHING OF UNCALIBRATED OMNIDIRECTIONAL AND PERSPECTIVE IMAGES
127
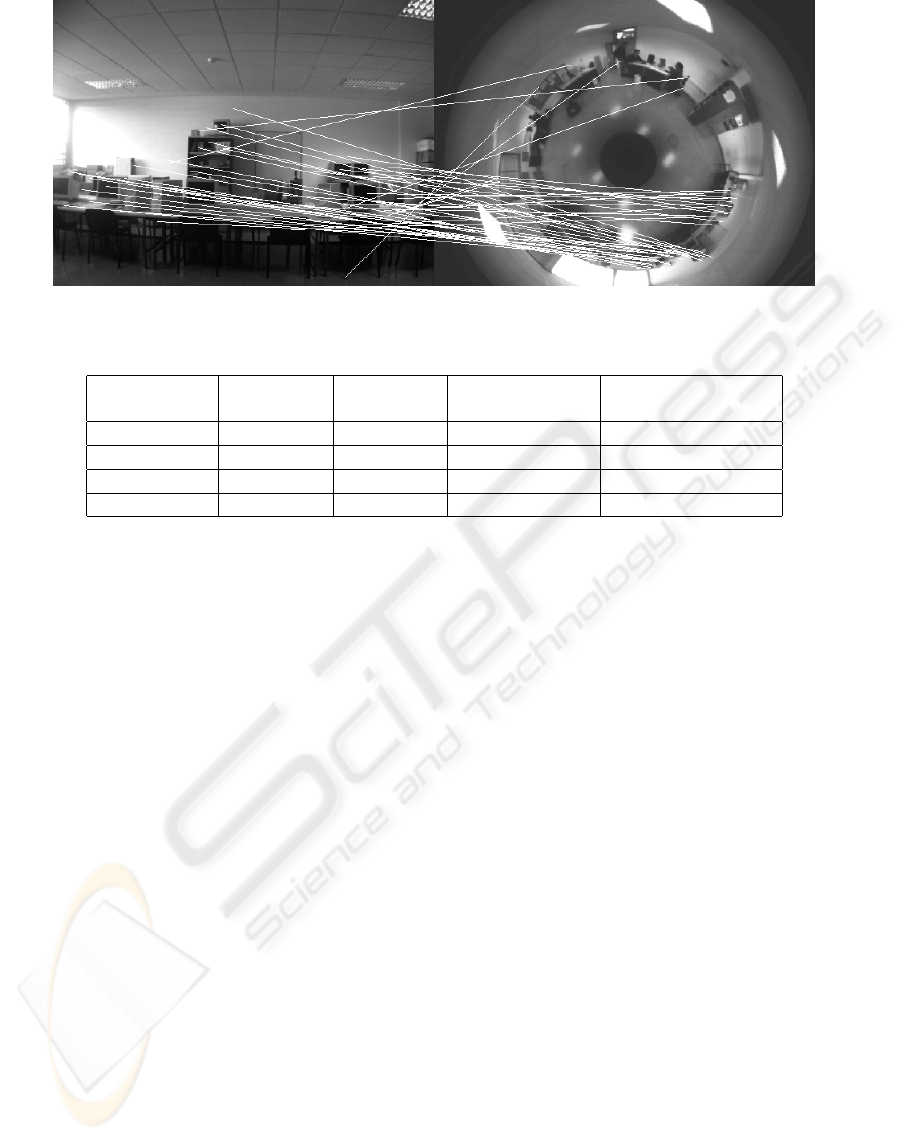
Figure 3: Matching between omnidirectional and perspective image using the unwrapping and the hybrid EG as a tool.
Table 1: Numerical results of the matches using the set of images.
Omni SIFT Persp SIFT
Initial Matches Robust EG matches
(inliers/outliers) (inliers/outliers)
Experiment 1 636 941 37/70 35/9
Experiment 2 636 1229 19/36 16/11
Experiment 3 246 941 36/11 34/4
Experiment 4 246 1229 20/14 16/6
5 CONCLUSIONS
In this work we have presented an automatic wide-
baseline hybrid matching system using uncalibrated
cameras. We have performed experiments using real
images with different mirrors and two different ways
to compute the hybrid fundamental matrix, a 6-vector
generic model and a reduced 4-vector model. The
last one has demonstrated be useful in order to require
fewer iterations to compute a robust fundamental ma-
trix and having equal or even better performance than
the 6-vector approach. We also prove that an easy
polar transformation can be a useful tool to perform a
basic matching between omnidirectional and perspec-
tive images. Finally the robust automatic matching
proved its efficiency to match an omnidirectional im-
age and a perspective image, both uncalibrated.
ACKNOWLEDGEMENTS
This work was supported by project NERO DPI2006
07928 and DGA(CONSI+D)/CAI.
REFERENCES
Barreto, J. P. and Daniilidis, K. (2006). Epipolar geome-
try of central projection systems using veronese maps.
In CVPR ’06: Proceedings of the 2006 IEEE Com-
puter Society Conference on Computer Vision and
Pattern Recognition, pages 1258–1265, Washington,
DC, USA. IEEE Computer Society.
Chen, D. and Yang, J. (2005). Image registration with
uncalibrated cameras in hybrid vision systems. In
WACV/MOTION, pages 427–432.
Hartley, R. I. and Zisserman, A. (2000). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, ISBN: 0521623049.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. In International Journal of Com-
puter Vision, volume 20, pages 91–110.
Menem, M. and Pajdla, T. (2004). Constraints on perspec-
tive images and circular panoramas. In Andreas, H.,
Barman, S., and Ellis, T., editors, BMVC 2004: Pro-
ceedings of the 15th British Machine Vision Confer-
ence, London, UK. BMVA, British Machine Vision
Association.
Murillo, A. C., Guerrero, J. J., and Sag
¨
ues, C. (2007). Surf
features for efficient robot localization with omnidi-
rectional images. In 2007 IEEE International Confer-
ence on Robotics and Automatio, Roma.
Sturm, P. (2002). Mixing catadioptric and perspective cam-
eras. In Workshop on Omnidirectional Vision, Copen-
hagen, Denmark, pages 37–44.
Sturm, P. and Gargallo, P. (2007). Conic fitting using the
geometric distance. In Proceedings of the Asian Con-
ference on Computer Vision, Tokyo, Japan. Springer.
Svoboda, T. and Pajdla, T. (2002). Epipolar geometry for
central catadioptric cameras. Int. J. Comput. Vision,
49(1):23–37.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
128
