
AUTOMATIC PARAMETERIZATION FOR EXPEDITIOUS
MODELLING OF VIRTUAL URBAN ENVIRONMENTS
A New Hybrid Metaheuristic
Filipe Cruz, Ant´onio Coelho and Luis Paulo Reis
Faculdade de Engenharia da Universidade do Porto, Rua Dr. Roberto Frias 4200-465, Portugal
Keywords:
Metaheuristics, optimization algorithms, optimization systems, expeditious modelling.
Abstract:
Expeditious modelling of virtual urban environments consists of generating realistic 3d models from limited
information. It has several practical applications but typically suffers from a lack of accuracy in the parameter
values that feed the modeller. By gathering small amounts of information about certain key urban areas, it
becomes possible to feed a system that automatically compares and adjusts the input parameter values to find
optimal solutions of parameter combinations that resemble the real life model. These correctly parameterized
rules can then be reapplied to generate virtual models of real areas with similar characteristics to the refer-
enced area. Based on several nature inspired metaheuristic algorithms such as genetic algorithms, simulated
annealing and harmony search, this paper presents a new hybrid metaheuristic algorithm capable of optimiz-
ing functions with both discrete and continuous parameters and offer competitive results in a highly neglected
field of application.
1 INTRODUCTION
There has been a growing need for expeditious mod-
elling systems for urban environments in recent years.
Applications include virtual city tours, georeferenced
services, urban planning.
Creating urban models that are accurate repre-
sentations of the real world can be extremely hard
in terms of information gathering and invested man
power. Close resemblances to the real world is often
an acceptable compromise for some applications. It
often occurs that it is quite impossible to gather in-
formation from the entire city you are trying to model
but it is somewhat easy to extract detailed information
from certain key-defining small areas from within the
city. Generating expeditious modelling rules that will
match such information is an important requirement.
The artificial intelligence field of optimum search in-
cludes meta heuristic algorithms that can determine
optimum parameter values.
The work described in this paper focuses on
solving this problem by creating a new hybrid
meta heuristic algorithm, competitive and capable of
handling both discrete and continuous parameters.
Adapting ideas from several other nature based meta
heuristic algorithms such as genetic algorithms, sim-
ulated annealing and harmony search.
This paper is divided into 5 sections: the first serv-
ing as the introduction, the second section referring to
related work, the third describing the developed sys-
tem, the fourth presenting and discussing the results
achieved, and the fifth presenting the conclusions and
future work.
2 RELATED WORK
2.1 Expeditious Modelling of Virtual
Urban Environments
The modelling of virtual urban environments has
many different applications including virtual city
tours (Schilling and Coors, 2003), georeferenced ser-
vices (Ito et al., 2005), cultural heritage preservation
(Hildebrand et al., 2000) (Zach et al., 2001) and urban
planning. Often there is a need for realistic or semi-
realistic models of cities, however, modelling accu-
334
Cruz F., Coelho A. and Paulo Reis L. (2008).
AUTOMATIC PARAMETERIZATION FOR EXPEDITIOUS MODELLING OF VIRTUAL URBAN ENVIRONMENTS - A New Hybrid Metaheuristic.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - ICSO, pages 334-337
DOI: 10.5220/0001495603340337
Copyright
c
SciTePress

rate realistic models grows problematic considering
increasing needs in size and complexity.
Using principles of l-system (Lindenmayer, 1968)
(Prusinkiewicz, 1986), it is possible to define sets of
production rules to model all kinds of urban environ-
ment elements (Parish and Muller, 2001) based on
limited georeferenced data (Muller et al., 2006). It’s
often difficult to acquire reliable data of an entire city
we are trying to model, however it is relatively easy
to gather information from certain key-defining sec-
tions of a city and assign the data to a georeferenced
database. The production rules with the data collected
will enable the creation of models resembling the area
of gathered information.
2.2 Meta Heuristic Algorithms for
Solving Optimization Problems
The field of artificial intelligence branchesmany areas
(Russel and Norvig, 2003), one of the most relevant
ones is the field of optimum search. Meta heuristic
algorithms play an important role in this field. Dif-
ferent meta heuristic variants and hybrid versions re-
fer to evolutionary computation or nature inspired be-
haviors: genetic algorithms (Holland, 1992) (Gold-
berg, 2002), simulated annealing (Kirkpatrick et al.,
1983) (Aarts et al., 2005) and harmony search (Lee
and Geem, 2005) (Mahdavi et al., 2007).
The common principle is to find the best combi-
nation of parameters of a given vector function such
that a related objective function is maximized or min-
imized. This process is iterated through educated ran-
dom guesses following the heuristic logic of the algo-
rithm. There is no best heuristic, performance varies
according to the constraints of problem. A big num-
ber of proposals for hybrid or customized adaptations
is found in recent literature (Deep and Thakur, 2007)
(Arumugama et al., 2005) (Kumar et al., 2007) (Lee
and Geem, 2005) (Mishra et al., 2005).
3 IMPLEMENTATION
3.1 Problem Statement
An l-systems based expeditious modeler for the gen-
eration of realistic urban environments becomes more
valuable with an optimum parameterization system.
The system must handle the input of boolean, in-
teger and real based parameters. The system must
allow a configuration easily adaptable to the prob-
lem. When solving linear constrained problems the
system must out-perform simple random based algo-
rithms such as hill climber and random search. When
solving problems with multiple local maximums the
system is required to perform above par of classic
meta heuristic algorithms such as simulated anneal-
ing, genetic algorithm and harmony search.
3.2 Hybrid Optimizer Meta Heuristic
Algorithm
The hybrid meta heuristic is inspired by basic prin-
ciples of real based genetic algorithms and concepts
from simulated annealing and harmony search.
There are two families of populations resident in
memory at all times, the original parent family and
the top list family. Their dimensions can be config-
ured by XML. Each iteration step of the meta heuris-
tic algorithm consists on creating a new original par-
ent family generation. The top list family maintains
in memory the best solutions ever found so far, sorted
by quality.
Each solution stores values for all parameters be-
ing calibrated. Each parameter has information re-
garding its type (integer, boolean, real) and scope
(minimum and maximum values). The type and scope
for each parameter are pre-configured by XML. The
values for the first generation of the original par-
ent family are calculated randomly within its scope
boundaries. The first generation of the top list family
is obtained by sorting the first generation of original
parent family. These values can also be loaded from
disk to test scenarios in same starting terms.
Each following original parent generation is ob-
tained by cross-breeding the original parent family
with a chosen member of the top list family. Ensur-
ing an elitist selection behavior inspired by genetic
engineering. Several threshold variables further in-
fluence the selection of the new solution to ensure a
wider search space scope not limited to the first gener-
ation. These variables incorporate monte carlo meth-
ods (Metropolis and Ulam, 1949) using probability
thresholds inspired by simulated annealing and har-
mony search. Some are, or can be, affected by what
is referred to as globalentropy, an internal value in-
creasing by each passing iteration as described in (1).
There are a total of five threshold parameters which
must be calibrated considering the problem.
Random New Struct Threshold (trns), affects the
probability of choosing a completely random new so-
lution. The higher this value the more probable it be-
comes to occur a total random creation of a new solu-
tion as seen in formula (3).
globalentropy = iterationstep/maxsteps (1)
trns = thresholdRandomNewStruct (2)
randSol = rand() ∗ globalentropy < trns (3)
AUTOMATIC PARAMETERIZATION FOR EXPEDITIOUS MODELLING OF VIRTUAL URBAN ENVIRONMENTS
- A New Hybrid Metaheuristic
335
Random New Type Threshold (trnt), affects the prob-
ability of choosing a completely random new value
for each of the solution parameter types. The higher
this value is the more probable it is to occur a totally
random new value for the current parameter type of
the solution as seen in formula (5).
trnt = thresholdRandomNewType (4)
randType = rand() ∗ globalentropy < trnt (5)
Toplist Dispersion Threshold (ttld), affects the prob-
ability of choosing lower ranking toplist parents to
cross the solution with. The higher this value the
wider the scope of choice as seen in formula (8).
ttld = thresholdToplistDispersion (6)
ttld > 1.0 : ttld = 1 − globalentropy (7)
victim = (rand() ∗ ttld ∗ maxFamilySize) (8)
Typevalue Dispersion Threshold (ttvd), affects the
parental gene influence for each value of the parame-
ter types of the solution as seen in formula (13).
tlv = topslistParentValue (9)
orv = originalParentValue (10)
ttvd = thresholdTypevalueDispersion (11)
ttvd > 1.0 : ttvd = 1− globalentropy (12)
newvalue = (ttvd ∗ orv) + ((1− ttvd) ∗tlv) (13)
Typevalue Entropy Threshold (ttve), affects the prob-
ability of scope jitter for each value of the parameter
types of the solutionas can be seen in formula (17).
ttve = thresholdTypevalueEntropy (14)
ttve > 1.0 : ttve = 1 − globalentropy (15)
scope = k(OParentValue− TLParentValue)k (16)
igl = (1.0F − globalentropy) (17)
ttvss = igl ∗ igl ∗ igl (18)
range = MaxParamValue− MinParamValue (19)
scope < ttvss∗ range : maxscope = range∗ igl (20)
scope > ttvss∗ range : maxscope = scope∗ ttve (21)
maxscope = scope∗ rand() (22)
newvalue = newvalue+ scope− (maxscope/2) (23)
4 RESULTS
A test-case was prepared involving the parameteriza-
tion of a set of production rules which would model
several buildings with certain height values missing.
The known information from all of the buildings in-
cluded georeferenced location and the values of the
buildings perimeter, area and bottomzvalue. The un-
known information from some of the buildings com-
prised solely the topzvalue.
The production rule used to estimate the unknown
topzvalue from the buildings is described mathemati-
cally in formula (27).
av = (cra − 1) ∗ fca∗ area (24)
ab = (crb− 1) ∗ fcb ∗ bottomzvalue (25)
ap = (crp− 1) ∗ f cp∗ perimeter (26)
topzvalue = avgz+ disp∗ (av+ ab+ ap) (27)
The formula implies a relation between the building’s
area (24), perimeter (26) and bottomzvalue (25) with
the building’s height to estimate a realistic topzvalue
for input to the expedite modeler.
Our formula has a total of 8 unknown fields to
be parametrized: avgz [100.0 .. 120.0], the average
height for all the buildings. disp [0.0 .. 1.0], the dis-
persion rate from the average height. cra [0 .. 3], area
correlation. crb [0 .. 3], bottomzvalue correlation. crp
[0 .. 3], perimeter correlation. fra [0.0 .. 1.0], the area
value correlation factor. frb [0.0 .. 1.0], the bottomz-
value correlation factor. frp [0.0 .. 1.0], the factor of
the perimeter correlation.
Different configurations of the meta heuristic al-
gorithm were tested with a fixed toplist family size of
20. The different tested configurations include the be-
haviorof some classic algorithms: random search, hill
climber and simulated annealing. A few additional
configurations were also tested for comparative per-
formance results. Each test iterated 50 generations
with a family size of 8 and were labeled as follows:
h1r8, hybrid random search. h1n8, hybrid new con-
figuration. h2n8, hybrid second new configuration.
h3n8, hybrid third new configuration. hhc8, hybrid
hill climber. hsa8, hybrid simulated annealing.
The calibration parameters of each configuration
tested can be consulted in Table 1.
Table 1: Threshold parameters of the different configura-
tions.
config trns trnt ttld ttvd ttve
h1r8 1.0 1.0 0.0 0.5 0.5
h1n8 0.01 0.01 0.1 1.1 1.1
h2n8 0.001 0.001 0.4 0.15 1.1
h3n8 0.001 0.001 0.1 0.1 1.1
hhc8 0.01 0.01 0.0 1.0 0.1
hsa8 0.01 0.01 0.0 1.0 1.1
The quality function for the test case is calculated as
a weighted sum of the height from the involved build-
ings. All simulations were performed three times to
present some insight on how deeply the performance
of the meta heuristics algorithm stochastic nature is
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
336
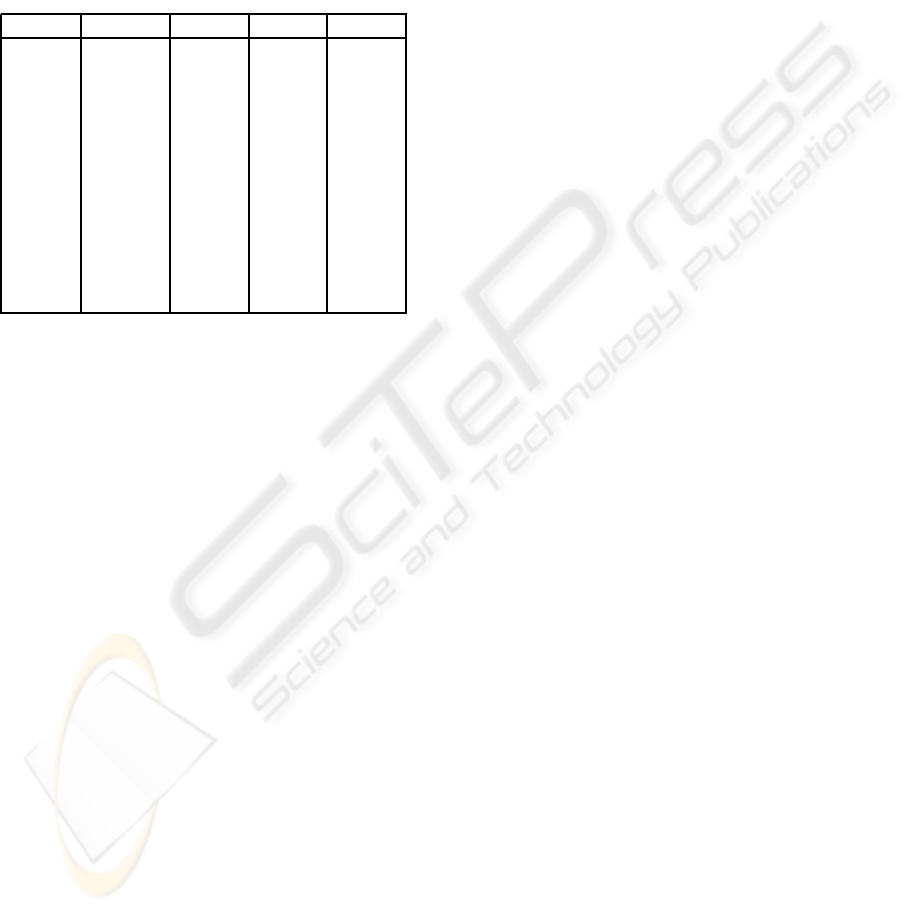
affected. Table 2 displays the progressive results ob-
tained from our test case. It shows the quality value
of the best solution found at 2%, 40%, 80% and at the
end of the iteration process and allow us to speculate
on how each configuration depend on the initial state
and perform comparatively to known random search,
hillclimber and simulated annealing algorithms.
Table 2: Progressive solution quality results from the differ-
ent configurations.
config 2% 40% 80% final
h1r8-1 163.95 54.254 44.854 44.854
h1r8-2 373.90 98.338 14.557 14.557
h1n8-1 272.53 9.319 9.319 9.319
h1n8-2 29.479 10.910 8.972 8.972
h2n8-1 438.53 24.047 14.425 14.425
h2n8-2 1038.61 1.758 1.758 1.758
h3n8-1 22.164 6.418 0.175 0.175
h3n8-2 288.56 3.934 0.798 0.798
hhc8-1 117.35 47.728 47.728 32.145
hhc8-2 1069.77 427.75 232.77 104.08
hsa8-1 1207.92 75.354 40.354 40.354
hsa8-2 315.95 137.05 42.689 9.804
5 CONCLUSIONS AND FUTURE
WORK
An automatic parameterization system for expedi-
tious modelling of virtual urban environments has
been developed with a successful field application.
Our test case, despite its relatively low complexity
and linear constraints, demonstrates the potential of
our new hybrid meta heuristic algorithm in finding
optimum parameters for rule sets of expeditious mod-
elling competitively to common optimum search al-
gorithms. Further test results are required to statis-
tically compare the performance of the new hybrid
meta heuristic algorithm with other meta heuristic al-
gorithms and parameter optimization problems.
An envisioned improvement to the system in-
volves applying principles of nested partition and lin-
ear regression to strengthen performance.
REFERENCES
Aarts, E., Korst, J., and Michiels, W. (2005). Simulated
annealing. pages 187–210. Springer.
Arumugama, M., Raoa, M., and Palaniappanb, R. (2005).
New hybrid genetic operators for real coded genetic
algorithm to compute optimal control of a class of hy-
brid systems. pages 38–52.
Deep, K. and Thakur, M. (2007). A new mutation operator
for real coded genetic algorithms.
Goldberg, D. (2002). The Design of Innovation:
Lessons from and for Competent Genetic Algorithms.
Addison-Wesley, Reading, MA.
Hildebrand, A., Dahne, P., Seibert, F., Christou, I., Demiris,
A., Diorinos, M., Ioannidis, N., Almeida, L., Diogo,
A., and Weidenhausen, J. (2000). Augmented reality
based system for personalized tours in cultural her-
itage sites.
Holland, J. H. (1992). Adaptation in Natural and Artificial
Systems: An Introductory Analysis with Applications
to Biology, Control and Artificial Intelligence. MIT
Press, Cambridge, MA, USA.
Ito, H., Teh, S., Nakanishi, H., and Tagawa, T. (2005). De-
sign and implementation of 3d interface for digital
city. volume 88, pages 60–68.
Kirkpatrick, S., Gelatt, C., and Vecchi, M. (1983). Optimiz-
ing by simulated annealing. volume 220.
Kumar, A., Sharma, D., and Kalyanmoy, D. (2007). A hy-
brid multi-objective optimization procedure using pcx
based nsga-ii and sequential quadratic programming.
Lee, K. and Geem, Z. (2005). A new meta-heuristic al-
gorithm for continuous engineering optimization har-
mony search theory and practice. volume 194, pages
3902–3933.
Lindenmayer, A. (1968). Mathematical models for cellular
interaction in development, parts i and ii. volume 18,
pages 280–315.
Mahdavi, M., Fesanghary, M., and Damangir, E. (2007).
An improved harmony search algorithm for solving
optimization problems. pages 1567–1579.
Metropolis, N. and Ulam, S. (1949). The monte carlo
method. volume 44, pages 335–341.
Mishra, N., Prakash, M., Tiwari, R., Shankar, F., and Chan,
T. (2005). Hybrid tabusimulated annealing based ap-
proach to solve multi-constraint product mix decision
problem.
Muller, P., Wonka, P., Haegler, S., Ulmer, A., and Gool, L.
(2006). Procedural modeling of buildings.
Parish, Y. and Muller, P. (2001). Procedural modeling of
buildings.
Prusinkiewicz, P. (1986). Graphical applications of l-
systems. pages 247–253.
Russel, S. and Norvig, P. (2003). Artificial Intelligence: A
modern approach. Prentice-Hall, 2 edition.
Schilling, A. and Coors, V. (2003). Generation of vrml city
models for focus based tour animations. pages 39–48.
Zach, C., Klaus, A., Bauer, J., Konrad, K., and Grabner, M.
(2001). Modeling and visualizing the cultural heritage
data set of graz. pages 219–226.
AUTOMATIC PARAMETERIZATION FOR EXPEDITIOUS MODELLING OF VIRTUAL URBAN ENVIRONMENTS
- A New Hybrid Metaheuristic
337
