
OFF-LINE ROBUSTIFICATION OF PREDICTIVE
CONTROL FOR UNCERTAIN SYSTEMS
A Sub-optimal Tractable Solution
Cristina Stoica, Pedro Rodríguez-Ayerbe and Didier Dumur
Department of Automatic Control, Supélec, 3 rue Joliot Curie, F91192 Gif-sur-Yvette, France
Keywords: Model predictive control, Multivariable systems, Polytopic uncertainties, Robust control, LMIs, BMIs.
Abstract: An off-line technique enabling to robustify an initial Model Predictive Control (MPC) for multivariable sys-
tems via the convex optimization of a Youla parameter is presented. Firstly, a multivariable predictive con-
troller is designed for a nominal system and then robustified towards unstructured uncertainties, while
guaranteeing stability properties over a specified polytopic domain of uncertainties. This condition leads to
verify a Bilinear Matrix Inequality (BMI) for each vertex of the polytopic domain. This BMI can be
mathematically relaxed to semi-definite programming (SDP) using a Sum of Squares (SOS) strategy, with a
significant increase of the number of scalar decision variables. To overcome this inconvenient, an
alternative tractable sub-optimal solution for the BMI is proposed, based on the elaboration of a stable
solution obtained by minimization of the complementary sensitivity function.
1 INTRODUCTION
During the latest years, the robustness aspect of Mo-
del Predictive Control (MPC) has been considered
both within online strategies (Kothare et al., 1996;
Goulart and Kerrigan, 2007; Camacho and Bordons,
2004) and off-line approaches (Wan and Kothare,
2003; Rossiter, 2003; Rodríguez and Dumur, 2005).
Mixed methods computing off-line a set of
controllers have been developed, leaving on-line
only the selection of the current controller (Olaru
and Dumur, 2004; Lee and Kouvaritakis, 2006).
This paper presents an off-line robustification
procedure for model predictive control applied to
multivariable (possibly non-square) uncertain
systems. It considers both unstructured and polyto-
pic uncertainties. Firstly, a predictive controller for a
nominal system is designed. Secondly, the robustifi-
cation problem under unstructured uncertainties is
considered. This leads to a convex optimization of a
multivariable Youla parameter solved with Linear
Matrix Inequalities (LMIs) techniques, as described
in (Stoica et al., 2007). Thirdly, the robust stability
of the controlled system towards system polytopic
uncertainties is considered. Since the polytopic
domain is chosen as a convex polytope, this implies
checking the stability only for the vertices of the
polytope (Kothare et al., 1996). This condition leads
to satisfy a Bilinear Matrix Inequality (BMI) for all
vertices of the polytopic domain. This problem can
be transformed into semi-definite programming
(SDP) using Sum of Squares (SOS) relaxations
described in (Scherer and Hol, 2006), with a
significant increase of the number of scalar decision
variables. To avoid this increase of the computing
time, this paper proposes a sub-optimal tractable
solution based on the minimization of the
complementary sensitivity function which permits to
enlarge the stability domain. A feasible solution for
each vertex can be found, the stability conditions for
all the vertices of the polytopic domain being then
explicitly integrated.
The most interesting result is that this
robustification technique permits to guarantee the
stability property on the entire polytopic uncertain
domain, even if the initial MPC controller may be
unstable for some regions of the polytopic domain.
This paper is organized as follows. The main
steps leading to a MIMO MPC and the related class
of stabilizing controllers are presented in Section 2.
The robustification procedure under unstructured
and polytopic uncertainties is detailed in Section 3.
Finally, some concluding remarks are given in
Section 4.
264
Stoica C., Rodríguez-Ayerbe P. and Dumur D. (2008).
OFF-LINE ROBUSTIFICATION OF PREDICTIVE CONTROL FOR UNCERTAIN SYSTEMS - A Sub-optimal Tractable Solution.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - SPSMC, pages 264-268
DOI: 10.5220/0001496302640268
Copyright
c
SciTePress
2 CLASS OF STABILIZING MPC
This section briefly presents the main steps leading
to an initial stabilizing multivariable MPC in state-
space formalism and the class of stabilizing
controllers obtained via the Youla parameter. More
details can be found in (Stoica et al., 2007). Let us
consider a discrete time MIMO LTI system with m
inputs and p outputs, characterized by the 4-uplet
),,,( 0CBA of the state-space representation.
In order to cancel the steady-state errors, an
integral action on the control vector is added,
leading to an extended state-space description:
⎩
⎨
⎧
=
Δ+=+
)()(
)()()1(
kk
kkk
ee
eeee
xCy
uBxAx
(1)
Minimizing the quadratic objective function (2)
gives the expression of the control signal. The
following notations are used:
r
y - the setpoint;
J
Q
~
,
J
R
~
- the weighting matrices. The future control
increments
)( ik +Δu
are supposed to be 0 for
u
Ni ≥ . The same output prediction horizons (
1
N ,
2
N ) and the same control horizon
u
N are applied
for all input/output transfers.
∑
∑
−
=
=
+Δ+
++−+=
1
0
2
)(
~
2
)(
~
)(
)()(
ˆ
2
1
u
J
J
N
i
i
N
Ni
i
r
ik
ikikJ
R
Q
u
yy
(2)
The predicted output )(
ˆ
ky is derived from:
∑
−
=
−−
++=+
1
0
1
)()(
ˆ
)(
ˆ
i
j
jii
jkkik BuACxACy
(3)
with )(
ˆ
kx obtained from the following observer:
])(
ˆ
)([)()(
ˆ
)1(
ˆ
kkkkk
eeeeee
xCyKuBxAx −+Δ+=+
(4)
An analytical minimization of (3) rewritten in a
matrix form, as described in (Maciejowski, 2001),
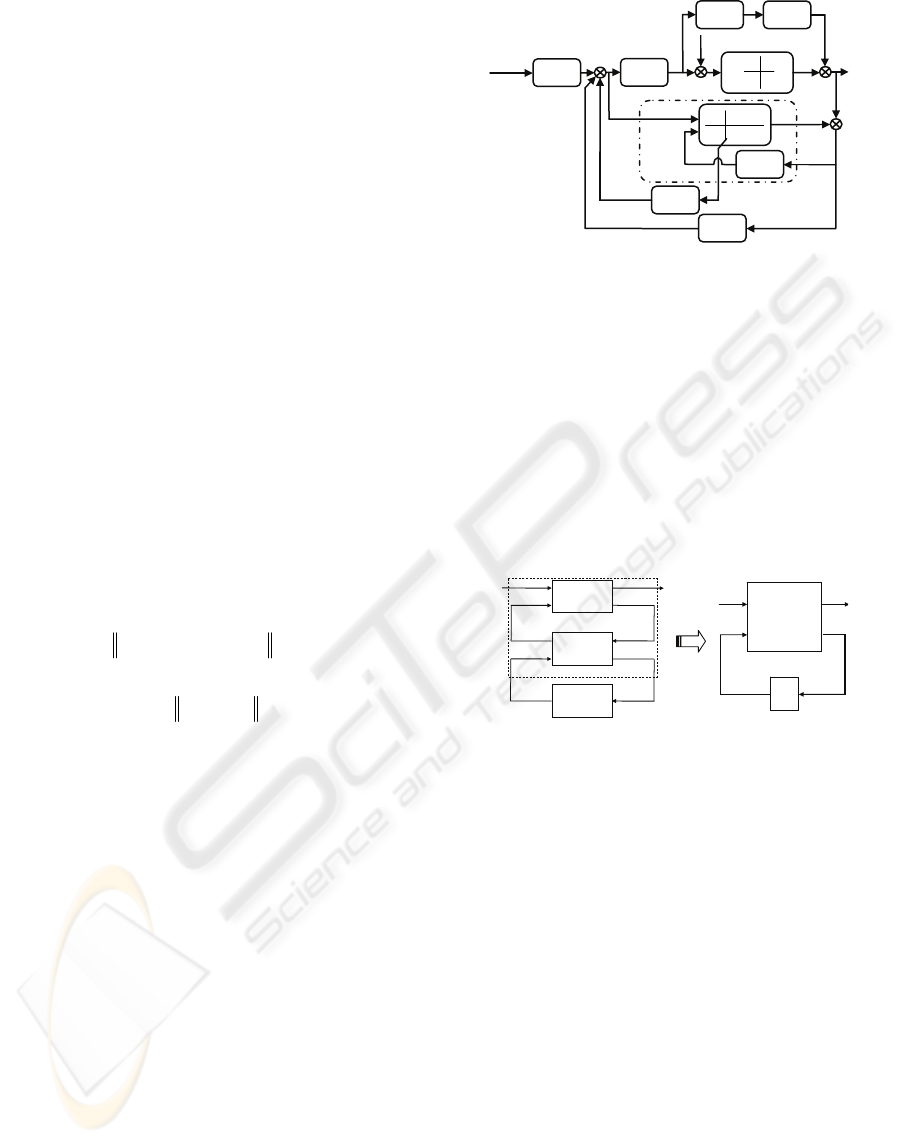
leads to the following control signal (Fig. 1):
)(
ˆ
)()( kkk
ew
xLwFu −=Δ
(5)
Figure 1: Robustified MIMO MPC via Q parametrization.
The structure of the control gain matrix
[]
21
LLL = and the setpoint pre-filter
w
F are the
same as in (Stoica et al., 2007). The expression (5)
provides an initial stabilizing controller. A possible
way leading to the class of all stabilizing controllers
is to use the Youla-Kučera parameter coupled with
this control law. It is well known from the literature
(Boyd and Barratt, 1991; Maciejowski, 1989) that
any stabilizing controller can be represented by a
state-space feedback controller coupled with an ob-
server and a Youla (also called Q) parameter.
Q
p
aramete
r
Initial
controller
System
w
y
u
’
y
’
u
z
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
zwzw
zwzw
TT
TT
2221
1211
Q
w
z
u
′
y
′
Figure 2: Class of stabilizing controllers with Q parameter.
The first step is to add supplementary inputs u
′
and outputs
y
′
with a zero transfer between them
(
0
22
=
zw
T in Fig. 2), which permits the connection
of the
Q parameter between y
′
and
u
′
without
restricting the closed-loop stability. As a result, the
closed-loop function between
w and z is linearly
parametrized by the
Q parameter, allowing convex
specification (Boyd and Barratt, 1991):
zwzwzw
TQTTT
zw 211211
+=
(6)
where
zw
zwzw
TTT
211211
,, depends on the considered
input/output (
w
/ z ) transfer.
Observe
r
−
)(ku
′
)(
ˆ
k
e
x
K
)(ky
′
L
Q
r
F
−
+
−
)(ku
)(kuΔ
∫
+
[]
⎥
⎦
⎤
⎢
⎣
⎡
0C
IBA
e
ee
+
+
u
Δ
u
W
)(kd
)(ky
⎥
⎦
⎤
⎢
⎣
⎡
0C
BA
)(
ˆ
ky
+
+
)(
2
Nk
r
+y
)(kb
)(kz
OFF-LINE ROBUSTIFICATION OF PREDICTIVE CONTROL FOR UNCERTAIN SYSTEMS - A Sub-optimal
Tractable Solution
265

3 ROBUSTNESS VIA THE
YOULA PARAMETRIZATION
A procedure enhancing robustness of the previous
multivariable MPC in terms of the Youla parameter
is presented in the particular case of the
maximization of the robust stability under additive
unstructured uncertainties, while guaranteeing
stability properties over a specified polytopic
domain of uncertainties. It will be shown that the
global robustification problem is a necessary trade-
off between both robustification aspects.
3.1 Robust Stability under
Unstructured Uncertainties
Along with the small gain theorem (Maciejowski,
1989; Zhou et al., 1996), a necessary and sufficient
condition for the robust stability under unstructured
uncertainties
u
Δ (Fig 3) is formulated as the
following
∞
H norm minimization:
∞
ℜ∈
∞
zw
Q
T
H
min
(7)
where
∞
ℜH is the space of stable transfers and
zw
T
also contains the weighting factors.
u
Δ
zw
zw
T
Figure 3: Unstructured uncertainty.
The minimization (7) may be more specifically
formulated using the following theorem.
Theorem
(Clement and Duc, 2000; Boyd et al.,
1994): A discrete time system given by the state-
space representation
),,,(
clclclcl
DCBA
is stable
and admits a
∞
H norm lower than
γ
if and only if:
0/0
TT
T
1
T
1
1
T
11
pf
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
=∃
−
IDC0
DI0B
C0XA
0BAX
XX
γ
γ
clcl
clcl
clcl
clcl
(8)
where the notation “ 0f ”/“ 0p ” refers to a strictly
positive/negative definite matrix. There exist
appropriate techniques to transform the expression
(8) into a LMI (Clement and Duc, 2000; Scherer,
2000). The decision variables should be
1
X ,
γ
and
the
Q parameter included in the closed-loop matrices
(Stoica et al., 2007). As a result, the optimization
problem is formulated as the minimization of
γ
subject to this first LMI constraint:
γ
0
min
LMI
(9)
To restrict the search of the Q parameter which
initially varies in the infinite-dimensional space
∞
ℜH , a sub-optimal solution is to consider for each
input/output pairs
),( ji a finite-dimensional
subspace generated by an orthonormal base of
discrete stable transfer functions (such as a
polynomial or FIR filter). This MIMO Youla
parameter can be obtained in the state-space
formalism using a fixed pair
),(
QQ
BA and
searching only for the variable pair
),(
QQ
DC .
3.2 Robust Stability under Polytopic
Uncertainties
The main result is the robustification procedure
under polytopic uncertainties. Consider the
following time-varying system, as a generalization
of the polytopic system (Kothare
et al., 1996):
⎩
⎨
⎧
=
+=+
)()()(
)()()()()1(
kkk
kkkkk
xCy
uBxAx
(10)
where
[]
ΩCBA ∈)()()( kkk and the polytope Ω
(Fig. 4) represents the convex hull
Co defined by the
l vertices
[]
iii
CBA .
[]
555
CBA
(nominal system)
[]
000
CBA
[]
333
CBA
[]
111
CBA
[]
222
CBA
[]
444
CBA
Figure 4: Polytopic uncertainty representation (
5=l
).
As
Ω
is a polytope (convex set), guaranteeing
the stability of (10) on the entire space
Ω means to
guarantee the stability for all the vertices of the
polytope (Kothare
et al., 1996). This is equivalent to
satisfy the following condition (Boyd
et al., 1994)
for each vertex
li ,1=
of the domain Ω :
0,0
T
22
22
T
,
,22
fp XX
XXA
AXX
=
⎥
⎦
⎤
⎢
⎣
⎡
−
−
icl
icl
(11)
This expression is bilinear in its decision
variables
2
X and the Q parameter included in
icl,
A .
The global robustification problem towards both
unstructured and polytopic uncertainties is achieved
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
266

by minimizing
γ
subject to the constraints LMI
0
and
BMI
i
(11):
γ
liBMILMI
i
,1,,
0
min
=
(12)
But this is a difficult problem since it involves
BMI expressions, in addition containing decision
variables (the Q parameter) jointly with a LMI. The
challenge is to try to find a sub-optimal solution.
A first mathematical approach based on Sum of
Squares (SOS) for relaxing the BMIs (12) is
developed in the literature by (Scherer and Hol,
2006). But this relaxation technique leads to a huge
number of scalar decision variables (that Matlab
TM
cannot deal with it for the moment) due to the size of
SOS matrices. Hence it cannot be used within the
presented robustification procedure.
For this reason, a second sub-optimal tractable
solution (in three steps) of solving these BMIs is
proposed. Firstly, in order to enlarge the polytopic
domain around the nominal system, the
minimization of the complementary sensitivity
function is added to (9). This is equivalent to add the
minimization of the transfer between b and y
(Fig. 1) to (9). This minimization is then trans-
formed into a LMI added to the first one (9):
CS
LMILMI
cc
CS
γ
γ
21
,
0
min +
(13)
choosing appropriate coefficients
1
c ,
2
c . Solving the
optimization problem (13) leads to a Q parameter
that will be used in the second step of the robustifi-
cation procedure. In fact, the minimization (13) is
recomputed until the resulting stability domain
includes at least the polytopic domain of
uncertainties, by selecting appropriate weightings
21
, cc . The expression (13) offers the possibility to
increase the stability domain, but does not offer any
information about the limits of this domain. To
explicitly include the considered polytopic domain,
the second and third steps must be followed.
In order to find a sub-optimal solution of (11),
the second step is to search
2
X using the Q para-
meter obtained with (13). This can be achieved for
instance by minimizing the trace of
2
X subject to
the
LMI
i
(
li ,1=
) derived from the BMIs (11), which
permits to choose
2
X in order to enlarge the
stability domain:
)(min
2
,1,
Xtr
liLMI
i
=
(14)
Thirdly, the value obtained for
i,2
X is used in
the final step of the optimization problem which
decision variables are
1
X ,
γ
and the Q parameter
included in the closed-loop matrices from
LMI
0
and
LMI
i
:
γ
liLMILMI
i
,1,,
0
min
=
(15)
where LMI
i
are the relaxations of the BMIs (11) for
the vertices
i
A , while fixing the variable
2
X . The
optimization (15) gives a Youla parameter that will
guarantee the stability of the controlled system for
all the vertices of the polytopic domain.
4 CONCLUSIONS
This paper has proposed an off-line methodology
which improves the robustness of an initial
stabilizing predictive controller via the convex
optimization of the Youla parameter. This procedure
deals with the stability robustness aspect of the
nominal system towards unstructured uncertainties
(solved with LMI tools), while guaranteeing the
stability under a considered polytopic uncertain
domain (leading to BMIs). In order to find a sub-
optimal solution for these BMIs, a new method
presenting a sub-optimal technique of solving this
non-convex problem is proposed: one matrix
variable is fixed using the minimization of the
complementary sensitivity function, while looking
for the other matrix variable. This provides
computationally tractable solutions.
The main advantage of this robustification
technique under polytopic uncertainties is that
guaranteeing the BMI stability condition robustly
stabilizes the controlled system for the entire
polytopic domain, even if the system coupled with
the initial predictive controller is unstable in some
points of the polytopic domain. This offers a
possible way of increasing the polytopic domain for
which the stability is guaranteed.
REFERENCES
Boyd, S., Barratt, C., 1991. Linear controller design.
Limits of performance, Prentice Hall.
Boyd, S., Ghaoui, L.El., Feron, E., Balakrishnan, V., 1994.
Linear matrix inequalities in system and control
theory, SIAM Publications, Philadelphia.
Camacho, E.F., Bordons, C., 2004. Model predictive
control, Springer-Verlag. London, 2
nd
edition.
Clement, B., Duc, G., 2000. A multiobjective control via
Youla parameterization and LMI optimization:
OFF-LINE ROBUSTIFICATION OF PREDICTIVE CONTROL FOR UNCERTAIN SYSTEMS - A Sub-optimal
Tractable Solution
267

application to a flexible arm, IFAC Symposium on
Robust Control and Design, Prague.
Goulart, P.J., Kerrigan E.C., 2007. Output feedback
receding horizon control of constrained systems.
International Journal of Control, 80(1), pp. 8-20.
Kothare, M.V., Balakrishnan, V., Morari, M., 1996.
Robust constrained model predictive control using
linear matrix inequalities. Automatica, 32(10),
pp. 1361-1379.
Lee, Y.I., Kouvaritakis, B., 2006. Constrained robust
model predictive control based on periodic invariance.
Automatica, 42, pp. 2175-2181.
Maciejowski, J.M., 1989. Multivariable feedback design,
Addison-Wesley Publishing Company, Wokingham.
Maciejowski, J.M., 2001. Predictive control with
constrains, Prentice Hall.
Olaru, S., Dumur, D., 2004. A parameterized polyhedra
approach for explicit constrained predictive control.
43
rd
IEEE CDC, The Bahamas.
Rodríguez, P., Dumur, D., 2005. Generalized predictive
control robustification under frequency and time-
domain constraints. IEEE Transactions on Control
Systems Technology, 13(4), pp. 577-587.
Rossiter, J.A., 2003. Model-based predictive Control. A
practical approach. CRC Press LLC.
Scherer, C.W., 2000. An efficient solution to multi-
objective control problem with LMI objectives.
Systems and Control Letters, 40, pp 43-57.
Scherer, C.W., Hol C.W.J., 2006. Matrix sum-of-square
relaxations for robust semi-definite programs. Math.
Program., Ser. B 107, pp 189-211.
Stoica, C., Rodríguez-Ayerbe, P., Dumur, D., 2007.
Improved robustness of multivariable model predictive
control under model uncertainties. 4
th
ICINCO,
Angers.
Wan, Z., Kothare, M., 2003. An efficient off-line formu-
lation of robust model predictive control using linear
matrix inequalities. Automatica, 39(5), pp 837-846.
Zhou, K., Doyle, J.C., Glover, K. 1996. Robust and
optimal control. Prentice Hall.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
268
