
A REAL TIME EXPERT SYSTEM FOR FAULTS
IDENTIFICATION IN ROTARY RAILCAR DUMPERS
Osevaldo S. Farias, Jorge H. M. Santos, João V. F. Neto, Sofiane Labidi, Thiago Drumond
Department of Electrical Engineering, Federal University of Maranhão
Av. dos Portugueses, s/n, São Luís, Brazil
José Pinheiro de Moura, Simone C. F. Neves
Companhia Vale do Rio Doce, Retorno do Itaqui, SN, São Luís, Ma, Brazil
Keywords: Expert System, Knowledge Base, Industrial Process, Rotary Railcar Dumper.
Abstract: This paper describes the development of a real-time Expert System applied to the ore extraction Industrial
branch, specifically used to assist the decision making and fault identification on rotary railcar dumpers of
the operational productive system located at Ponta da Madeira Dock Terminal, built and operated by
Companhia Vale do Rio Doce (now referred just as VALE) in São Luis-MA. The Expert System is built on
JESS (Java Expert System Shell) platform and provides support to engineers and operators during the ore
unloading as soon as supplying on-line information about faults triggered by device sensors of the rotary
railcar. The system’s conception involves the application of CommonKADS methodology, knowledge
engineering and artificial intelligence techniques at the symbolic level for representing and organizing the
knowledge domain in which the system is applied.
1 INTRODUCTION
In a great deal of industrial production mechanisms
approaches able to turn automatic a wide range of
processes have being used. Such applications
demand from high control pattern to decision taking,
where Artificial Intelligence (AI) presents wide
applicability of those approaches implementing their
concepts under the form of Expert Systems (Su et
al., 2005). Applications with this architecture allow
the machine to be structured into a model apt to
behave in the most similar way a human specialist
uses its reasoning when facing a decision taken
problem (Feigenbaum, 1992).
The VALE production system comprehends
several mining complexes, among which is
notorious the Ponta da Madeira Dock Terminal
(PMDT). In this complex, processes such as
Unloading, Storing and Minerals Shipping are
conducted, supervised by the Operational Control
Center (OCC). This article discusses the
development of a real time Expert System applied to
decision making when facing faults occurred in the
VV311-K01 rotary railcar dumper system used to
unload minerals at the VALE’s PMDT. Besides, we
apply some information technologies such as: the
JESS, the JAVA language and also XML
(eXtensible Markup Language) aiming the real time
running of the Expert System.
This paper is organized as follows: Section 2
describes the particularities and the operation of the
rotary railcar dumper system. In Section 3 are
detailed the Expert System Development steps, such
as knowledge acquisition, representation and
system’s implementation. Section 5 summarizes
some remarks and the conclusion.
2 THE ROTARY RAILCAR
DUMPER SYSTEM
The minerals unloading mechanism initiates at the
rotary railcar dumper with the arrival of the
locomotive pulling behind it 102 to 104 rail-wagons
that will be positioned in the dumper.
To attain the rotation a positioner car fixes the rail-
wagons in the rotary and this, consequently, unloads
347
S. Farias O., H. M. Santos J., V. F. Neto J., Labidi S., Drumond T., Pinheiro de Moura J. and C. F. Neves S. (2008).
A REAL TIME EXPERT SYSTEM FOR FAULTS IDENTIFICATION IN ROTARY RAILCAR DUMPERS.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - ICSO, pages 347-350
DOI: 10.5220/0001497603470350
Copyright
c
SciTePress

the material by performing a 160° rotation, in the
conveyor belts (Fonseca Neto et al., 2003). The
Operational Process is monitored by the Supervisory
Control and Data Acquisition (SCADA). This
supervision is also conducted by means of the
programmable logic controllers (PLCs) which
receive all the information from the dumper
hardware through input cards.
Thus, the rail-wagons dumper’s hardware is one
important middleware for the communication
between the Expert System and the VV311-K01
hydraulic and mechanical components at the
operation time.
3 THE EXPERT SYSTEM
DEVELOPMENT
In order to develop the Expert System we
highlighted its stages based on JESS and
CommonKADS methodologies.
The JESS architecture involves cognition
components defined as: Inference Engine, Agenda
and Execution Engine. All these structures catch
assertions or domain facts and also create new
assertions. The inference JESS engine (based on the
Rete algorithm) is constituted by the Pattern-
Matching mechanism that decides which rules will
be activated. The Agenda programs the order in
which the activated rules will be fired, and the
Execution Engine is in charge of the triggering shot
(Friedman-Hill, 2003). In JESS the reasoning
formalism presents rules composed by if...then
patterns, represented by the LHS (Left-Hand Side)
and RHS (Right-Hand Side), respectively.
CommonKADS is a methodology for building
knowledge based systems (Labidi, 1997). Products
arisen from Expert Systems development that use
this methodology are the result of the performed
phases modelling activities, and characterize the
input artefacts for the successive refinements
undergone in the next steps of the CommonKADS
life cycling.
The steps of the system with actions such as
Acquisition and Knowledge representation are
summarized– also including the Analysis phase–
Rules representation– attending the Design phase –
and the System’s codification – satisfying the phase
Implementation.
3.1 Acquisition and Knowledge
Representation
All the knowledge acquisition was done by means of
interviews with the expert through information kept
in the operational reports. The knowledge
representation was built based upon production rules
that map the knowledge of the VV311-K01
operation expert.
There were observed the main concepts related
with the dumper’s positioner car along activities in
the operational productive system, aiming at getting
knowledge elements description to elaborate the
organizational model that complements the
CommonKADS.
The domain facts deal with the equipment
situation and the potential causes that promote the
main system stopping or the reduction of its
productivity. Thus, by correlating problems and
opportunities that can be solved or enhanced by the
Expert System from which there were extracted the
identified slots for building the VV311-K01
templates, it was elaborated the organizational
model presented in Table 1.
Table 1: Organization Model.
The slot called ‘Situation’ is one of the units for
representing the knowledge in the JESS inference
engine. The causes that lead the dumper to reach
certain circumstances are pointers for guiding what
must be done as to specify derivations that constitute
a method for the positioner car problem resolution,
and the strategies to attain this solution. These
efforts are described through the knowledge model
shown in Table 2.
Table 2: Knowledge Model.
SLOT OPPORTUNITIES PROBLEMS
Vibration
Broken Rollers
Spin
Lack of voltage
Short-circuit
Broken fixing
screws
Situation
Positioner car
Broken Counter-
bolts
SLOT INFERENCE
LEVEL
TASK LEVEL
Motor basement snap
Resonance
Vibration
Bend axle
Terminal out of order
Low isolation
Cause
Short-circuit
Falling’s wire material
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
348
According to Labidi (1997), the inference and task
levels are layers that describe the expert Knowledge;
thus, the model in Table 2 constitutes a set of
knowledge instances on the VV311-K01 positioner
car component. In Table 2, in order to better
characterize the system’s knowledge mechanism in
agreement with the CommonKADS methodology,
the activities organized in the inference model
presented in Figures 1, were decomposed.
COMPARE
situation
rules
decision
rules
current
result
situation
COVER
hypothesis
(probable)
PREDICT
expected
result
result
dumper brake
module do not work
Causal Model
Manifestation Model
command=not acted
different results
command=acted
lack voltage
Data flux and
Knowledge
Knowledge
role
Static role Inference
Legend
Figure 1: Inference Model.
The knowledge’s roles, described in Figure 1, are
functional names that capture the elements
participant in the reasoning process. Inference
actions assume as inputs static roles, represented by
the manifestation and causal models. Within the
causal model, the rules relate the positioner car fault
modes taking into account their attribute’s values,
while in the manifestation model are reunited the
production rules that express their responsibilities
through the attributes’ values, which satisfy some
given conditions. The inference concepts represent
reasoning axioms that will be mapped by the JESS
inference engine used in the Expert System.
3.2 System Implementation
The Expert System decision module performs a
scanning on the faults detected by the sensors
present in the VV311-K01 instrumentation.
Through the checking of these faults addresses,
which are generated by the PLCs and mapped into
faults tagnames stored in the relational database, the
Expert System rules are activated or not in the
working memory of the JESS inference engine.
Tagnames (e.g.
AFF_CEP_F01@VV311K01) are
part of historical registry from PIMS (Plant
Information Management System). In the Expert
System they play the role of input data for the rules
that deduce the situation the VV311-K01
components pass through, that is why they form the
LHS rules pattern in the JESS language syntax, as
can be seeing in the excerpt bellow:
(defrule rule198
(test(eq TRUE(actedTag
"AFF_CEP_F01@VV311K01")))
=>
(store RESULT198 "Loose-Wire-
Connection")
(assert (decision(decCausa Loose-Wire-
Connection))))
The ‘actedTag’ function returns true for 1 and false
for 0, according to the result read in the XML file
generated by the stored procedure into the PIMS
oracle database server (see Figure 2). The function
‘test’ is a conditional JESS instruction responsible
for determining that this pattern will only be unified
if the result of the ‘actedTag’ function returns true.
The part of XML document is shown as the
following structure:
<?xml version="1.0" encoding="UTF-8" ?>
- <tags>
- <tagname id="ASC_B11@VV311K01">
<value>0</value>
</tagname>
- <tagname id="AIN_ALI_001@VV311K01">
<value>1</value>
</tagname>
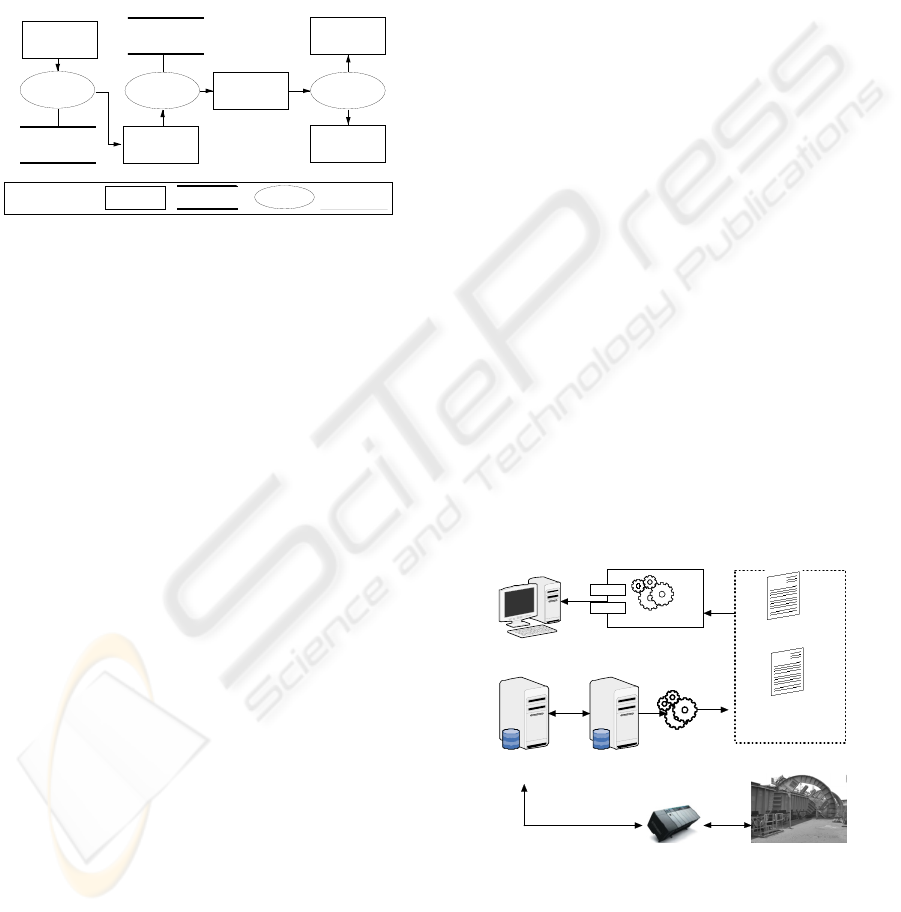
Aiming at present the system’s global solution,
Figure 2 describes the Expert System architecture
and the nodes distribution that form its structure in
order to summarize the Expert System solution.
Once the architecture is formulated, in the
following parcel of the system’s decision rule, it is
possible to observe that the cause ‘Loose-Wire-
Connection’ deduces that the ultrasound on VV311-
K01 must be made.
PIMS
Relational Database Server
PLC Historical
Database Server
PLC
VV311-K01
Knowledge Base
ExpertSystem.jar
Rules File
(vv311-01.clp)
XML File
(tagNam es.xml)
Client
engine JESS
Figure 2: Expert System Architecture.
The RHS pattern of the rule’s parcel below stores
the result through the command store, and next
inserts in the ‘decision’ template, the action to be
done.
A REAL TIME EXPERT SYSTEM FOR FAULTS IDENTIFICATION IN ROTARY RAILCAR DUMPERS
349

(defrule rule204
(decision (decCause Loose-Wire-
Connection))
=>
(store RESULT204 "Do ultrasound on
VV311-K01")
(assert (decision
(decDecision Do-ultrasound-on-
VV311-K01))))
At the end of the performed deductions, in the shell
JESS working memory is shown a window with the
recommendations that were stored by the command
store, based in the causes that led to the inference
process pointed out by the system, along the
responses given by the user. Figure 3 shows the
decision taking delivered by the system.
Figure 3: Expert System Recommendations.
The recommendations viewed in Figure 5, represent
the rules that were activated in the working memory
of the JESS engine and were triggered (shot) only
because they got the unification of patterns present
in its structure, deduced by the Rete algorithm. The
control structure used for the Expert System rules
chaining was based on backward chaining
(Friedman-Hill, 2003).
4 CONCLUSIONS
The system developed in this work presented the
conception and automation of the strategic
knowledge required by VALE’s mineral unloading
system activities. The building of the Expert System
in JESS, turned available the use of existing and
well succeeded methods for the developing of
systems based on knowledge, like the
CommonKADS, and the direct handling of JAVA
technology objects.
The system’s performance while processing
information in the JESS inference engine was
considered satisfactory once the search frequency of
such information elements was tested at 5 s. interval
for the deduction of 250 rules, in order to update the
expert system the events triggered by the PIMS
server. The speed and proper timing obtained in
terms of the updating processes of the expert system
rules base was due to the use of the XML
technology as to feed the system’s knowledge base.
Finally, this system furnished enhancement and
relative readiness to the knowledge processing, as a
guide for the decision taking of the VALE’s rail-
wagon unloading system experts.
ACKNOWLEDGEMENTS
The authors express their thanks to
FAPEMA/CAPES, Intelligent Systems
Laboratory/UFMA, Automation and Control
Laboratory/UFMA and VALE.
REFERENCES
Feigenbaum, A.E. Expert Systems: principles and practice.
In: Encyclopedia of computer science and engineering,
1992.
Friedman-Hill, E. J. Jess in Action: Rule-based systems in
java. USA: Manning Press, 2003.
Su, K.W. Hwang, S.L. Chou Y.F. Applying knowledge to
the usable fault diagnosis assistance system: A case
study of motorcycle maintenance in Taiwan. Elsevier
Science Ltd, 2005.
Fonseca Neto, J. V. da., Moura, J.P. de. Um Sistema
Especialista para Identificação de Falhas e Tomada de
Decisão em Correias Transportadoras de Minério, VI
SBAI, 2003.
Labidi, S. CommonKADS Extension for Supporting
Multi-Expertise. In: The 17th International Conference
of the British Computer Society on Expert Systems,
(ES'97), 1997, Cambridge. Proceedings of the 17
th
,
International Conference of the British Computer
Society on Expert Systems, (ES'97), 1997.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
350
