
MULTI-LEVEL CONTROL OF AN INTELLIGENT
WHEELCHAIR IN A HOSPITAL ENVIRONMENT USING A
CYBER-MOUSE SIMULATION SYSTEM
Rodrigo A. M. Braga, Marcelo Petry, Eugenio Oliveira and Luis Paulo Reis
Artificial Intelligence and Computer Science Lab-LIACC, Faculty of Engineering of University of Porto
Rua Dr. Roberto Frias, s/n 4200-465, Porto, Portugal
Keywords: Intelligent Wheelchair, Intelligent Robotics, Strips Planning, Path Planning, A* Algorithm.
Abstract: The development of intelligent wheelchairs is a very good solution to assist severely handicapped people
who are unable to operate classical electrical wheelchair by themselves in their daily activities. This paper
describes the integration of a robotic simulator with our intelligent wheelchair shared control and planning
modules. An adapted version of the free Cyber-Mouse robotic simulator was used to simulate the movement
of the intelligent wheelchair in a hospital environment. Adaptations of the subsumption architecture, Strips
Planning and A* Algorithms were employed and integrated to allow wheelchair intelligent behavior. The
experimental results have demonstrated the success of the integration of these algorithms in our simulator
allowing very safe motion of the intelligent wheelchair in the simulated hospital environment. Also, the
adapted Cyber-Mouse simulator proved its capability and robustness in simulating the hospital environment
and wheelchair physic characteristics.
1 INTRODUCTION
Wheelchairs are important locomotion devices for
handicapped and senior people. With the increase in
the number of senior citizens and the increment of
people bearing physical deficiencies in the social
activities, there is a growing demand for safety and
comfortable Intelligent Wheelchairs (IW) to
practical uses. The main functions of IWs are (Faria,
2007a)(Faria, 2007b)(Jia, 2005):
•Interaction with the user, including hand based
control, such as, joystick, keyboard, mouse, touch
screen; voice based control, such as audio; vision
based control, such as camera; and other sensor
based control, such as pressure sensors.
•Afford Services, for instance autonomous
navigation (with safety, flexibility and robust
obstacle avoidance), communication with other
devices (like automatic doors).
This paper discusses the application of a Cyber-
Mouse simulator, developed at the Univ.Aveiro in
Portugal (Lau, 2002) in the study, development and
test of shared control and high-level planning
algorithms applied in an IW operating in a hospital
environment.
A shared control algorithm was tested, allowing
IW automatically avoids danger situations. Also,
typical algorithms used in most intelligent robotics
applications were applied in the control of the IW
and simulated in the hospital scenery. Blended with
the control, a motion planner was developed capable
of generating the behavior/path commands
according to an a-priori map of the world. This
motion planner is capable of instructing the low-
level motion controller module to achieve the high-
level commands desired by the user (Luo, 1999).
Cyber-Mouse is a competition among virtual
robots, which takes place in a simulated
environment running in a computer network. The
simulation system creates a virtual arena with a
starting grid, a target area, signalled by a beacon,
and populated with obstacles. It also creates the
virtual bodies of the robots. The simulator estimates
sensor measures which are sent to the agents.
Reversely, receives and apply actuating orders
coming from agents (Lau, 2002).
The paper is subdivided in 5 different sections:
section 2 presents some brief definitions of the
control algorithms applied in this research; section 3
contains a description of the system developed;
section 4 provides experimental tests and result
discussion and section 5 presents the final
conclusions and points out some future research
topics.
179
A. M. Braga R., Petry M., Oliveira E. and Paulo Reis L. (2008).
MULTI-LEVEL CONTROL OF AN INTELLIGENT WHEELCHAIR IN A HOSPITAL ENVIRONMENT USING A CYBER-MOUSE SIMULATION SYSTEM.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 179-182
DOI: 10.5220/0001498801790182
Copyright
c
SciTePress
2 INTELLIGENT WHEELCHAIR
CONTROL ALGORITHMS
To test the simulator, the algorithms used to
implement the control system and algorithms used
for the high-level planning system were:
- Adapted Subsumption Architecture. (Brooks,
1991) (Russell, 2002)(Ferber, 1991) for basic
moving;
- Knowledge Representation using Grids.
Spatial knowledge for robotic movement,
navigation and planning (Borenstein,
1991)(Thrun, 1996).
- A* Search Algorithm for Trajectory
Generation. used to find a path from a given
initial node to a given goal node (Shapiro, 2000)
(Hart, 1968) (Barr, 1986).
- Adapted Strips Planning Algorithm. Planning
is the task of searching for an action sequence to
achieve a given goal (Russell, 2002)(Weld,
1999)(Fikes, 1971) (Bonet, 2001).
3 SYSTEM DESCRIPTION
The hospital environment was created modifying the
Cyber-Mouse labyrinth definition XML file that
contains positions of a set of walls of arbitrary shape
and beacons that emit signals. Figure 1 shows our
hospital modified floor plan.
Figure 1: Hospital environment represented using the
Cyber-Mouse simulator.
The hospital representation is composed of five
rooms: bathroom, kitchen, hall and garden and a set
of walls of different shapes. IWs are represented by
modified robotic agents. UDP Sockets are used for
communication between the robotics agents and the
simulator. The communication is based in
dispatching XML messages of five types: request
register; refuse reply; acceptation reply; sensor data,
action order.
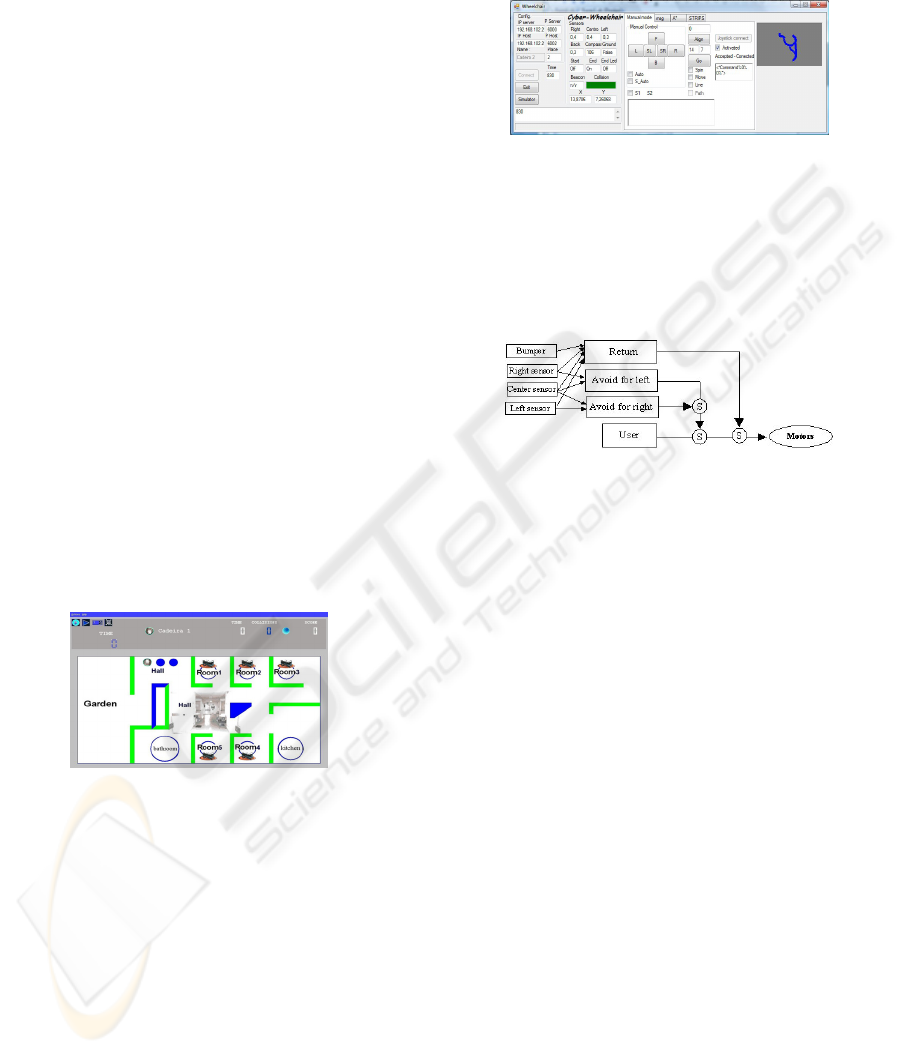
Figure 2 presents the developed agent control
software interface. A communication configuration
panel can be seen in left side of the interface, the
sensor values are depicted in the middle of the
interface. In the right side, there are three function
modules. The first module has the following
functions: semi-automatic control, revolve in a point
direction, move to a point, move through planning
path.
Figure 2: Intelligent Wheelchair software interface.
The semi-automatic control, also denoted shared
control, was constructed with fusion between user
command and subsumption architecture. This way it
achieves safe movement allowing automatic obstacle
avoidance. Figure 3 presents the implemented
architecture.
Figure 3: Subsumption architecture used in shared control.
Figure 4 shows the path generation interface
module. The path generation was implemented using
the A* algorithm. The state world information is
loaded into the system using a XML file. A grid of
56x28 cells representing the world- state, for this
development, was considered as the world state
environment. Also, object extension techniques were
used, in such manner that a robot may be
represented as a point in the system without the risk
of collision with the walls.
The path generation module searches for a path,
starting in the actual point and finishing in the user
selected point. The path generated can be seen in the
interface provided.
The last module (see Figure 5) is an automatic
planning module developed based in Strips Planning
Algorithm with inverse chaining. Initially, we
developed five general high-level objectives: “go-
bathroom”, “go-garden”, “go-room”, “go-
kitchen”, “go-consulting_room”. These general
objectives generate different final objectives,
depending on the patient, wheelchair and location
set for the actions. For example, the action patient 1
with wheelchair 2 go-room for Room 1 results in the
objective: patient 1 in Room 1, patient 1 without
wheelchair, wheelchair 2 free and situated in hall.
In this way, it is allowed to set many different final
objectives and since the plan depends on the initial
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
180

state, it will have different sequences and number of
actions for arriving the final objective.
Figure 4: Path generation module interface.
After plan generation, we can execute it in the
simulated environment. Now, the system uses the
path generation module for the generation the paths
for movement actions and automatic move control
module to execute the movement through the path
generated with collision avoidance. This module
executes step by step the actions of the plan using
the other modules whenever it is necessary.
Figure 5: Planning module interface.
4 EXPERIMENTS AND RESULTS
This section presents a simple operation example of
our robotic agent and results gathered in this
experiment. After initiating the simulator, the
configuration, map and grid file are loaded in the
simulator, through a XML file.
As focus is primarily testing the simulation
system and the implementation of an ordinary multi
level control, sensor and motor noise were disable.
Another simplification is the robot data position,
which is provided by the simulator GPS system that
represents a robust odometry system.
The simulator configuration is presented in
Table 1. The simulator allows inserting noise in the
robots sensors and actuators. However in this stage
of development, the sensor and actuators noise was
not used.
The first test was the use of the A* algorithm for
searching the path from point (x=9,5 and y=13,2) to
point (x=14 and y=7). The plan devised is presented
in Table 3. The plan is presented in inverse order,
i.e., the first point is in the table bottom and last
point is in the table top.
Table 1: XML file to configure simulator.
<Parameters SimTime="18000" CycleTime="80" CompassNoise="0"
BeaconNoise="0" ObstacleNoise="0" MotorsNoise="0"
RunningTimeout="1350" GPS="On" ShowActions="False" Nbeacons="5"
Lab="C:/CiberToolsWindows-1.2.0/Labs/My2Lab.xml"
Grid="C:/CiberToolsWindows1.2.0/Labs/MyGrid.xml" />
The resulting movements are shown in Figure 6.
The black letters represent before of move, the blue
line represent plan path and the red line represent the
path travelled. The number ‘0’ represents free space,
‘1’ represents the expanded wall. In this test, the
move was free collision and with minimum
trajectory error.
Figure 6: Movement result.
Next step was to generate a comprehensive plan
using the implemented path generator. The goal in
this case was to pick up patient 1 in bedroom 1;
carry him to bedroom 5, to make company to patient
5; and finally go back to the lobby. In this example
we had as objective: “Go to the bedroom”, as Place:
5 and Patient: 1. This parameters result as final
objective:
On(P1,R5) ^ WithoutC(P1) ^ On(C2,H). The
world state before the action, the resulting plan and
the following state are represented in Figure 7.
Figure 7: World state s, plan and world state s'.
The grid containing the final state and the
travelled path, based on the plan mentioned before,
can be observed in Figure 8. This grid contains the
four basic movements that the IW needed to perform
to achieve the final objective: from the initial point
until the lobby, from lobby to bedroom 1 (to pick up
patient 1), then to the bedroom 5 and after leave
patient 1 going back (empty) to the lobby. The time
to conclude movement in automatic control was 982
second and for manual control was 870 seconds.
Figure 8: Final movement result.
MULTI-LEVEL CONTROL OF AN INTELLIGENT WHEELCHAIR IN A HOSPITAL ENVIRONMENT USING A
CYBER-MOUSE SIMULATION SYSTEM
181

5 CONCLUSIONS
This paper presented the implementation of a robotic
Intelligent Wheelchair, simulating its behavior in an
adapted Cyber-Mouse simulator. This agent resulted
of a modular system composed of three modules.
The first one is a shared control that merges user
commands with the information received by the IW
sensors. This advantage prevents the collision with
objects in its way becoming movement system more
reliable and safe. The algorithms developed use a
subsumption architecture: once there are objects
close to the wheelchair, the user commands are
disabled and deflect commands are sent to the
motors, ensuring a safe motion.
A module was develop using the A* algorithm as
path generator to calculate the shortest path from the
robot’s actual position to the objective point. The
third module was implemented to plan some usual
tasks in a hospital environment, using Strips
planning to solve these interactions. In most of the
cases Strips proved to be efficient, delivering
complete plans, with exceptions presented under
Sussman anomaly effects, where one operation
cancels other in the plan.
It was also demonstrated that Cyber-Mouse is a
friendly tool to test control algorithms, IW
navigation and its interaction with hospital
environment.
Future research directions include the
improvement to non-linear planning and upgrade
from A* to D* algorithm, once it’s preferable in
such a dynamic environment. To be fully intelligent,
it’s not enough the wheelchair to plan its own path
or share its control. It is also necessary to
communicate with other intelligent wheelchairs and
devices like doors activation systems, elevators and
lights. Due to this, it is intended to perform an in
depth study in proper methodologies to implement
these capacities in the wheelchair, and this way,
implement some functions as cooperative behavior
among a group of IW and collaboration among the
user and the system. In Cyber-Mouse it is necessary
to increase its present simulation capacities, from its
actual three IW, enabling hybrid systems test, where
real and virtual IW interact with each other. These
interactions make possible high complexity tests
with a substantial number of devices and
wheelchairs, representing a reduction in the project
costs, once there wouldn’t be necessary a large
number of real IW. Still, in Cyber-Mouse, it is
necessary to implement noise treatment in the
motors and sensors to have actions in the simulated
wheelchair closer to those of real wheelchairs.
REFERENCES
Barr, A. Cohen, P. Feigenbaum, E., 1986. Handbook of
Artificial Intelligence. Addison Wesley. Vol. 1.
Bonet, B. and Geffner, H., 2001. Heuristic search planner
2.0. The AI Magazine, 22(1), pp.77–80.
Borenstein, J., Koren, Y., 1991. The Vector Field
Histogram - Fast Obstacle Avoidance for Mobile
Robots, IEEE Journal of Robotic and Automation, v.
7, n. 3, pp. 278-288.
Brooks, R. A., 1991. Intelligence Without Reason. Proc.
12th Int. Joint Conference on Artificial Intelligence -
IJCAI-91, Sydney, Australia. pp.569-595.
Faria, P. M., Braga, R A. M., Valgôde, E., Reis L. P.,
2007a. Platform to Drive an IW using Facial
Expressions. Proc. 9th Int. Conf. on Enterprise
Information Systems, HCI, ICEIS’2007. pp.164-169.
Funchal, Portugal. June 12–16.
Faria, P. M., Braga, R. A. M., Valgôde, E., Reis, L. P.,
2007b. Interface Framework to Drive an Intelligent
Wheelchair Using Facial Expressions. IEEE Int.
Symp. on Industrial Electronics, pp. 1791-1796, June
4-7.
Ferber, J.; Gasser, L., 1991. Intelligence artificielle
distribuée. In: Int. WorkShop on Expert Systems &
Their Applications, 10., Avignon. Cours n. 9. France.
Fikes, R., Nilsson, N. J., 1971. STRIPS: A New Approach
to the Application of Theorem Proving to Problem
Solving. IJCAI 1971. pp.608-620.
Hart, P. E., Nilsson, N. J. and Bertram R., 1968, A formal
basis for the heuristic determination of minimum cost
paths. IEEE Transactions on Systems Science and
Cybernetics, 4(2):pp.100–107.
Jia, P. and Hu, H., 2005. Head Gesture based Control of
an Intelligent Wheelchair. CACSUK-11
th
Ann. Conf.
Chinese Aut. Comp. Society in the UK, Sheffield, UK.
Lau, N., Pereira, A., Melo, A., Neves, A. and Figueiredo,
J., 2002. Ciber-Rato: Um Ambiente de Simulação de
Robots Móveis e Autónomos. Rev. DETUA, Vol. 3,
Nr. 7, pp.647-650, Sept.
Luo, R. C., Chen, T. M. and Lin, M. H., 1999. Automatic
Guided IW System Using Hierarchical Grey-Fuzzy
Motion Decision-Making Algorithms, Proc. IEEVRSJ
1999 Int. Conf. on Intelligent Robots and Systems.
Russell, S. and Norvig, P., 2002. Artificial Intelligence: A
Modern Approach. Prentice Hall, E.Cliffs, NJ, 2
nd
ed.
Shapiro S.C., 2000. Encyclopedia of Artificial
Intelligence. Wiley-Interscience. May.
Thrun, S. and Bücken, A., 1996. Integrating Grid-Based
and Topological Maps for Mobile Robot Navigation,
In: Proc. 13th National Conference on Artificial
Intelligence AAAI, Portland, Oregon, pp.944-950.
Weld, D. S., 1999. Recent advances in AI planning. AI
Magazine, pp.93–123
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
182
