MULTI-AGENT ARCHITECTURE FOR SIMULATION OF
TRAFFIC WITH COMMUNICATIONS
Pedro Fernandes and Urbano Nunes
Institute of Systems and Robotics, University of Coimbra, Polo II, Coimbra, Portugal
Keywords: Multi-agent systems, Traffic simulation, Network simulation, Intelligent Transportation Systems.
Abstract: Inter-vehicle communications, in the context of Intelligent Transportation Systems, will probably bring a
significant improvement in both traffic safety and efficiency. In order to evaluate in what measure this is
true, traffic simulations that take into account the communications between vehicles are needed.
In this paper, we propose an agent-based architecture, in which the simulation and management of the inter-
vehicle communications are integrated in the simulation of vehicles, in a hierarchical multi-agent environ-
ment. An overview of multi-agent methodologies, platforms, among other, is also presented.
1 INTRODUCTION
Human transport in urban spaces relies mostly on
individual vehicles, congesting the transportation
networks. Studies and simulations of traffic have
been made for decades, through macroscopic,
mesoscopic and microscopic traffic simulators.
Recently, in the context of Intelligent Transpor-
tation Systems (ITS), vehicle to-vehicle (V2V) and
vehicle to infrastructure communications (V2I) are
being developed, namely the DSRC (Dedicated
Short Range Communications), operating in 5.9
GHz band. The standardization process is almost
finished under IEEE 802.11p/IEEE 1609.x (also
designated by WAVE: Wireless Access in Vehicular
Environments) and IEEE 1556 standards. In EU, the
International Organization for Standardization
(ISO), under the Technical Committee TC204, is
working in similar standards – Communication Air
Interface Long and Medium Range (CALM) – to
ensure European-wide inter-vehicle communications
interoperability.
To study the impact that such systems may have
in the near future, efforts to integrate traffic and
network simulators have been pursued. However, a
useful solution has not been reached yet.
The integration of both traffic and network simu-
lations in a system may be considered a complex
task, due to a vast set of reasons, such as the intrinsic
complexity of traffic theory, the wireless network
transmissions involved, the real-time constraints and
the distributed nature of the system, among others.
At the present, traffic theory does not account to
driver behavior changes due to the existence of
communications. Therefore, equation-based model-
ing is not the most appropriate method to use in
simulation. Agent-based modeling allows the devel-
opment of a more adaptive system, and although
system validation may be more difficult, it can be
done at both system and individual levels.
2 RELATED WORK
The use of intelligent agents in traffic simulation is
an emergent area of research. Table 1 presents some
of the works in this area and simulators integration.
Table 1: Related work.
Vogel and
Nagel (2005)
Multi-agent simulation model with
application to Berlin traffic.
Hallé et al.,
(2004)
Agent-based architecture to develop
centralized and decentralized platoons.
Li et al.,
(2006)
Urban traffic control system using
multi-agent technology.
Dresner and
Stone (2005)
Agent-based simulation of a traffic
intersection.
Eichler et al.,
2005
Coupling traffic and network simula-
tors and a V2V messaging application.
Piorkowski
et al., 2006
Network- and application-centric
evaluation oriented architecture.
Avila et al.,
2005
Intersection warning system, coupling
traffic and network simulators.
215
Fernandes P. and Nunes U. (2008).
MULTI-AGENT ARCHITECTURE FOR SIMULATION OF TRAFFIC WITH COMMUNICATIONS.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 215-218
DOI: 10.5220/0001501202150218
Copyright
c
SciTePress
3 DEVELOPMENT ISSUES
According to Wooldridge (2002), “an agent is a
computer system that is situated in some environ-
ment, and that is capable of autonomous action in
this environment in order to meet its design objec-
tives”. Autonomy, situatedness, reactivity and proac-
tivity are some important characteristics of agents.
In a multi-agent architecture, issues like organiza-
tion, coordination and security are also relevant.
To develop a MAS system, a disciplined ap-
proach should be followed, and an appropriate plat-
form should be chosen, along with communication
standards between agents – preferably based on open
standards – and appropriate ontologies. The simula-
tion platform must also be selected or developed.
3.1 Methodologies
Several proposed methodologies to develop a MAS
may be considered. Prometheus, Gaia and Tropos
are some of the examples in the literature. However,
not all existing methodologies are appropriate for
every problem. Some of them aim at generality.
Others focus more on specific platforms and lan-
guages, gaining in detail and adaptability.
Prometheus methodology was proposed by
Padgham and Winikoff (2002). According to the
authors, the reason why they proposed a new meth-
odology was the methodology claimed detail, sup-
port of BDI (Beliefs, Desires and Intentions) agents,
scaling ability and tool support. To support design
and development of multi-agent systems using Pro-
metheus, Padgham and Winikoff developed the
Prometheus Design Tool, that implements the three
phases of Prometheus and process some consistency
checking.
Gaia methodology presents a general approach, to
allow its use for a broad type of agent-based sys-
tems. However, this characteristic, which is one of
its strengths, is also its most pointed weakness, since
the detailed design phase and implementation have
intentionally been left out.
Other methodologies appear in literature, namely
ROADMAP, Tropos, SODA, MESSAGE, MaSE,
MAS-CommonKADS, AOR, OPM/MAS, MAS-
SIVE, Ingenias, DESIRE, PASSI and AgilePASSI.
In Table 2, the phases of some methodologies are
presented.
Prometheus seems an appropriate methodology
for initial system development. All the relevant
phases are covered conveniently, and PDT tool al-
lows consistency and completeness checking
through the steps of each of the phases.
3.2 Platforms
Choosing the right platform for the problem domain
at hand is not a trivial task. The choice is closely
connected with the methodology adopted.
Follows a short description of some platforms:
Jade framework is probably the most used agent-
oriented middleware. Is an open source distributed
middleware system, compliant with FIPA specifica-
tions, that implements both white and yellow pages,
agent mobility, ontologies and content languages,
among other features. JADE does not provide, how-
ever, direct support to the development of BDI agent
architectures.
Jadex is a software framework for the development
of goal-oriented agents following the BDI model.
Since JADE platform does not allow direct imple-
mentation of this model, Jadex, using JADE, allows
the creation of rational agents. Jadex agents have
two main components: an agent definition file
(ADF), coded in XML, and Java code. Jadex BDI
metamodel is specified in XML Schema.
Jason is an interpreter of the an extended version of
AgentSpeak(L), allowing agents to be distributed
over the net using Simple Agent Communication
Infrastructure (SACI). Jason is available as open
source and uses jEdit (http://www.jedit.org) as IDE.
JACK
TM
is a commercial agent platform, which uses
syntactic and semantic extensions of Java that allows
the implementation of BDI agents.
The use of an open source platform is preferable.
Moreover, the compliance with FIPA specifications
is important to allow interoperability of the systems.
JADE platform provides those and other features.
Table 3 presents some platform characteristics.
Table 2: Methodology phases.
Method-
ology
Phases
Prome-
theus
1-specifications; 2-architectural design;
3-detailed design; 4-implementation.
Gaia 1-requirements; 2-analysis; 3-design.
Road-
map
1-requirements; 2-analysis; 3-design.
OPM/
MAS
1-requirements; 2-analysis; 3-design;
4-deployment.
Table 3: Platform classification.
Platform
Open
source
BDI
Com-
pliance
White &
yellow pages
JADE Yes No FIPA Yes
Jadex Yes Yes FIPA* Yes*
Jason Yes Yes KQML No
JACK
TM
No Yes FIPA Yes
* with JADE
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
216
3.3 Ontologies and Languages
Communication is a valuable tool for agents to in-
teract, exchange information and request services.
At the present, Ontology Web Language (OWL) is
the language of the Semantic Web that is being stan-
dardized by the World Wide Web Consortium.
An agent platform must allow the use of content
language (e.g. FIPA-SL Content Language Specifi-
cation), and communication languages (e.g. FIPA-
ACL Agent Communication Language).
3.4 Simulation
Multi-Agent Based Simulation is considered the
support of choice for the simulation of complex sys-
tems, replacing or integrating with other micro-
simulation techniques, most of them object-oriented.
4 THE MODEL
The model proposed consists of a novel multi-agent
system that manages the communications inside
each vehicle and simulates the communications be-
tween each of them and the infrastructure. Inter-
vehicle communications are managed by an agent-
based module that simulates real wireless communi-
cations between vehicles, using the appropriate stan-
dards. To allow interoperability, the platform sup-
porting the development of the proposed multi-agent
system complies with FIPA specifications.
The architecture will be tested in the context of
an intersection, where the management of communi-
cations and localization of the vehicles will have
both a distributed and a centralized component. This
option aims to provide simulation functionalities at
the communication level that, in the reality, would
be provided by the transmission media. Moreover,
localization of hazardous situations (vehicles with-
out communications, pedestrians) is better provided
by centralized facilities.
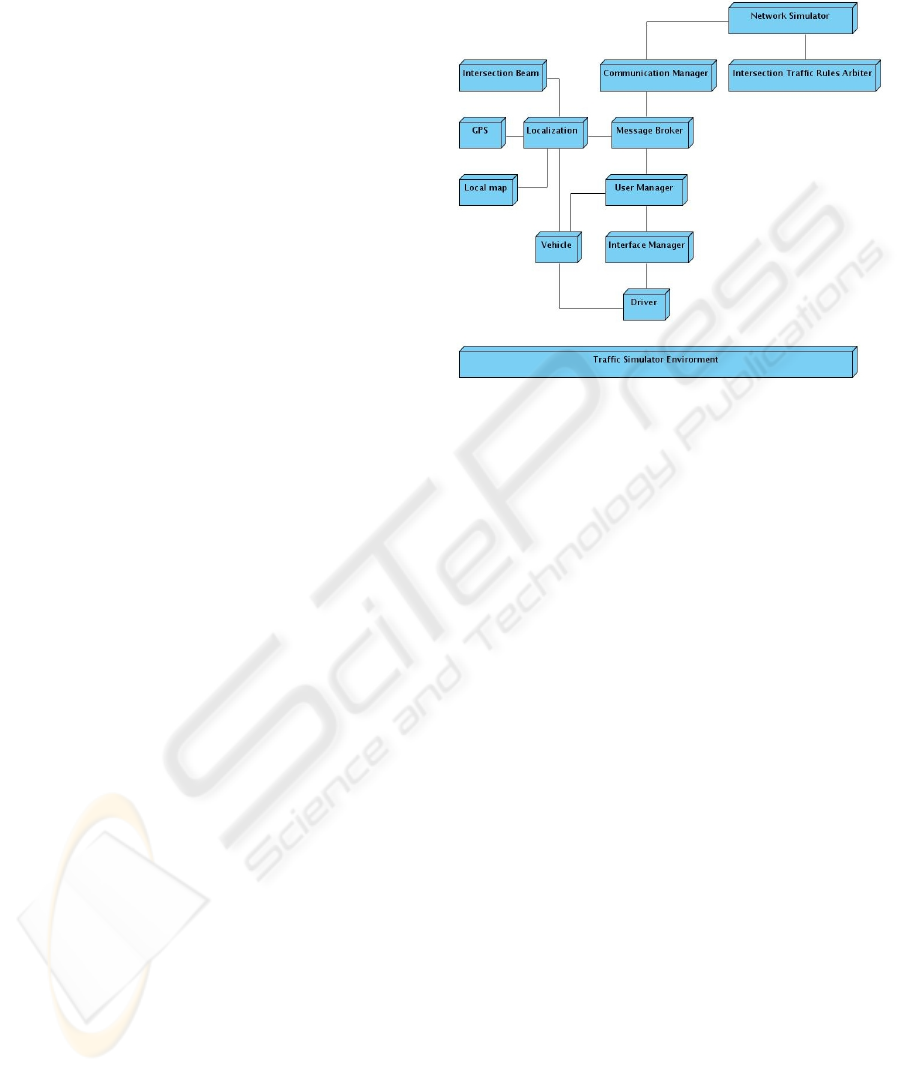
The architecture proposed to the multi-agent sys-
tem is depicted in Figure 1.
4.1 Multi-agent Architecture
A brief description of the main agents involved in
the proposed architecture follows:
Network Simulator: The main function of the Net-
work Simulator (NS) is to receive all communica-
tions between Communication Manager agents, and
simulate the network transmission between them,
considering the environment and the location of each
one. Appropriate communication standards must be
used by this agent, namely DSRC and CALM.
Figure 1: Multi-agent architecture.
Intersection Traffic Rules Arbiter (ITRA) must deal
with intersection control of traffic, recording all traf-
fic events and dealing with resolution of conflicts
between User Managers (UM). With low traffic
throughput, we may have a distributed control of
traffic, where UM may agree with the priority of
each other, always under ITRA supervision. As traf-
fic flow grows, ITRA will have to validate all UM
decisions, eventually overcoming some of them. In a
high traffic flow scenario, all traffic rules decisions
must be taken by ITRA, and vehicles become “data
probes” of the centralized traffic rule management.
Although this might seems contradictory with the
choice of an agent-based system, real-time con-
straints impose the option presented above.
Communication Manager (CM) manages commu-
nications between the vehicle and external systems,
such as the infrastructure and other vehicles. In both
cases, NS is used as an intermediary, to simulate
wireless network transmissions. Each vehicle com-
municates through its own CM.
Message Broker (MB) must manage all internal
messages, and has the incumbency of filtering and
its prioritization, ensuring that critical messages are
dealt first by the appropriate agents. In this scheme,
MB may delay low priority messages or, in some
cases, even discard such messages.
User Manager (UM) main function has to do with
decisions about the priority of the vehicle, with the
agreement of all vehicles in its direct neighborhood,
always under ITRA supervision. As stated before, as
traffic flow grows, the decisions are taken by ITRA,
MULTI-AGENT ARCHITECTURE FOR SIMULATION OF TRAFFIC WITH COMMUNICATIONS
217

in a centralized manner. To avoid deadlocks, all the
decisions must be taken with anticipation, allowing
the forecast of possible deadlocks and its resolution
before they actually occur.
Interface Manager (IM) agent deals with the selec-
tion of the most appropriate message interface to the
driver, taken in account the type of message.
Localization agent determines the localization of the
vehicle in the intersection map, using GPS data and
an intersection beam signal, and compares its posi-
tion with neighbor vehicles positions, periodically
transmitted through wireless communications. This
agent must decide whether the situation is critical,
based on position and vehicle data, and warn UM in
case of imminent danger.
Vehicle agent gathers vehicle data (e.g. speed, ac-
celeration, brakes, steering) and feeds Localization
agent with that information. UM receives also simi-
lar feedback. Moreover, this agent gets commands
issued by Driver agent.
Driver agent deals with the control of the whole ve-
hicle. It receives information, whether critical or not,
via IM agent and responds accordingly to that in-
formation and the type of driver modeled. For that
purpose, Driver agent maintains a driver type data-
base. This agent issues commands to Vehicle agent
directly and indirectly through IM.
Traffic Simulation Environment represents the en-
vironment where the agents evolve. One of its main
functions is to provide communications between
agents, in the platform level, allowing appropriate
management of agents’ percepts and actions.
Graphical presentation of simulation results will also
be directly connected with this component.
5 CONCLUSIONS AND FUTURE
WORK
In this paper we propose an architecture in which the
simulation and management of the inter-vehicle
communications are integrated in the simulation of
vehicles, in a hierarchical multi-agent environment.
We also present a short survey of existing method-
ologies, platforms, ontologies and languages, and
suggest some possible choices to allow appropriate
system implementation.
MAS development using the appropriate meth-
odology, the implementation of the solution in the
selected platform, the validation of the process and
final deployment will follow.
ACKNOWLEDGEMENTS
This work was supported by Institute of Systems and
Robotics and Fundação para a Ciência e Tecnologia
under contract NCT04:POSC/EEA/SRI/
58016/2004.
REFERENCES
Avila, A. et al., (2005). A complete Simulator Architec-
ture for Inter-vehicle Communication Based Intersec-
tion Warning Systems. In Proc. 8
th
Int. IEEE Conf. In-
telligent Transportation Systems, Vienna, Austria.
Braubach, L. Pokahr, A., & Lamersdorf W. (2006). Tools
and Standards, Chapter of Multi-agent Engineering -
Theory and Applications in Enterprises. Springer Se-
ries: Int. Handbooks on Information Systems, Editors:
S. Kirn, O. Herzog, P. Lockemann, O. Spaniol.
Dresner, K. and Stone, P., 2005. Multiagent Traffic Man-
agement: An Improved Intersection Control Mecha-
nism. In The Forth International Joint Conference on
Autonomous Agents and Multiagent Systems (AAMAS
05), pp. 471-477, Utrecht, The Netherlands.
Eichler, S et al. (2005). Simulation of Car-to-Car Messag-
ing: Analyzing the Impact on Road Traffic. In Proc. of
the 13th IEEE Int. Symposium on Modeling, Analysis,
and Simulation of Computer and Telecommunication
Systems, vol. 00, pp. 507 – 510.
Hallé, S., Laumonier, J., & Chaib-draa, B. (2004). A De-
centralized Approach to Collaborative Driving Coor-
dination. In IEEE Intelligent Transportation Systems
Conference, Washington, D.C., USA.
Li, Z., Wang, F., Miao, Q., & He, F. (2006). An Urban
Traffic Control System Based on Mobile Multi-
Agents. In Proc. of IEEE Int. Conference on Vehicular
Electronics and Safety, Shanghai, China.
Padgham, L., & Winikoff, M. (2002). Prometheus: A
Methodology for Developing Intelligent Agents. In
proceedings of the Third International Workshop on
Agent-Oriented Software Engineering, at AAMAS'02.
Piorkowski, M. et. al. (2006). Joint Traffic and Network
Simulator for VANETs. Poster Session, MICS 2006,
Zurich, Switzerland.
Sturm, A., & Shehory, Onn. (2003). A Framework for
Evaluating Agent-Oriented Methodologies. In M.
Winikoff P. Giorgini, B. Henderson-Sellers, editor,
Proc. of the Int. Bi-Conference Workshop on Agent-
Oriented Information Systems, AOIS.
Vogel, A., & Nagel, K. (2005). Multi-agent based simula-
tion on individual traffic in Berlin, In Proc. of the Int.
Conference on Computers in Urban Planning and Ur-
ban Management (CUPUM’05), London.
Wooldridge, M. (2002). An Introduction to multi-agent
Systems. John Wiley & Sons, Chichster, U.K.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
218
