
THE PARALLELIZATION OF MONTE-CARLO PLANNING
Parallelization of MC-Planning
S. Gelly, J. B. Hoock, A. Rimmel, O. Teytaud
TAO (Inria), Lri, UMR Cnrs 8623, Univ. Paris-Sud, France
Y. Kalemkarian
High Performance Calculus, Bull, Grenoble, France
Keywords:
Bandit-based Monte-Carlo planning, parallelization, multi-core machines, message-passing.
Abstract:
Since their impressive successes in various areas of large-scale parallelization, recent techniques like UCT and
other Monte-Carlo planning variants (Kocsis and Szepesvari, 2006a) have been extensively studied (Coquelin
and Munos, 2007; Wang and Gelly, 2007). We here propose and compare various forms of parallelization of
bandit-based tree-search, in particular for our computer-go algorithm XYZ.
1 INTRODUCTION
Dynamic programming (Bellman, 1957; Bertsekas,
1995) provides a robust and stable tool for dynamic
optimization. However, its application to large scale
problems is far from simple and involves approxima-
tions, as in approximate value functions in approxi-
mate dynamic programming (Powell, 2007). Some
alternate approaches, like using simulations for focus-
ing on more important areas of the state space as in
RTDP (Barto et al., 1993), have provided some im-
portant yet unstable tools for large scale approximate
dynamic programming. Monte-Carlo planning, ap-
plied to Go since (Bruegmann, 1993), and in partic-
ular Bandit-based Monte-Carlo planning (Kocsis and
Szepesvari, 2006a), provides an alternate solution, in-
creasing the importance of simulations. Bandit-based
Monte-Carlo planning features the construction of a
tree approximating incrementally the distribution of
possible futures. Tools from the bandit literature (see
(Lai and Robbins, 1985; Auer et al., 2001); adversar-
ial case in (Kocsis and Szepesvari, 2005); huge sets
of arms in (Banks and Sundaram, 1992; Agrawal,
1995; Dani and Hayes, 2006; Berry et al., 1997))
are used in order to bias the random development
of the tree in the direction of the most important
directions; the important paper (Kocsis and Szepes-
vari, 2006a) applies recursively bandits for the bi-
ased random development of a tree. The efficiency
of recursive bandits is also shown by some chal-
lenges won by such methods (Hussain et al., 2006).
Its application to computer-go has provided partic-
ularly impressive results (Coulom, 2006; Wang and
Gelly, 2007). The decision taking, at each step, is far
more expensive, but the overall cost is much lower
than the computational cost of one dynamic program-
ming loop when the branching factor (or the state
space) is large. The analysis of Monte-Carlo plan-
ning if far from being closed, as it is not clear that
upper-confidence bounds are the best tool for that,
in particular when heuristics like AMAF(Bruegmann,
1993) (also termed RAVE) are included. However, we
here consider a fixed empirically tuned algorithm, and
we focus on its parallelization, for various forms of
parallelization (multi-core machines, standard clus-
ters). The application to computer-go is one of the
most illustrative applications of bandit-based Monte-
Carlo planning methods. In particular, Go is still far
from being solved, as moderate human players are
still much better than the best computer-go programs.
Monte-Carlo planning is a revolution in computer-
go, in some cases combined with tactical knowledge
(Cazenave and Helmstetter, 2005; Coulom, 2007) but
also in some cases almost from scratch without any
specific knowledge (Wang and Gelly, 2007), except
some likelihood of random playouts. The paralleliza-
tion of Monte-Carlo planning is classical in the multi-
core case; we here provide an analysis of the speed-
up of this multi-core approach (shared memory). We
then move to the message-passing architecture, for
244
Gelly S., B. Hoock J., Rimmel A., Teytaud O. and Kalemkarian Y. (2008).
THE PARALLELIZATION OF MONTE-CARLO PLANNING - Parallelization of MC-Planning.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - ICSO, pages 244-249
DOI: 10.5220/0001502402440249
Copyright
c
SciTePress
a cluster-parallelization. We briefly introduce ban-
dits and bandit-based Monte-Carlo planning below,
for the sake of clarity of notations. We then present
the multi-core parallelization in section 2, and two
different approaches for the cluster parallelization in
section 3, 3.1. A bandit problem is typically defined
as follows: (1) A finite set A = {1, ...,N} of arms
is given. (2) Each arm a ∈ A is equipped with an un-
known probability of reward p
a
. (3) At each time step
t ∈ {1, 2,...}, the algorithm chooses a
t
∈ A depend-
ing on (a
1
,. .. ,a
t−1
) and (r
1
,. .. ,r
t−1
). (4) The ban-
dit gives a reward r
t
, with r
t
= 1 with probability p
a
t
(independently), and r
t
= 0 otherwise. A bandit al-
gorithm is an algorithm designed for minimizing the
so-called regret:
Regret = T inf
a∈A
p
a
−
T
∑
i=1
r
t
.
Important results, depending on assumptions on the
set of actions and their distributionof rewards, include
(Lai and Robbins, 1985; Auer et al., 2001; Banks and
Sundaram, 1992; Agrawal, 1995; Dani and Hayes,
2006; Berry et al., 1997; Hussain et al., 2006; Kocsis
and Szepesvari, 2005; Coquelin and Munos, 2007). A
bandit is said to have side information if some infor-
mation other than the reward is available to the algo-
rithm. We present various bandit algorithms in sec-
tion 1: these bandit algorithms usually work as fol-
lows for each time step:
- compute a score, for each possible arm, which
consists in (i) an exploitation term, larger for arms
for which the average rewards in the past is good;
(ii) an exploration term, larger for arms which
have not been tried often.
- choose the arm with maximum score.
Typical improvements are: (i) give heuristically a
score to arms which have not been visited yet (see e.g.
(Wang and Gelly, 2007; Coulom, 2007)); (ii) guess
some side information (see the AMAF heuristic e.g.
(Gelly and Silver, 2007)); (iii) restrict the sampling to
the k(t) first nodes for k(t) some non-decreasingmap-
ping (see progressive widening in (Coulom, 2007)).
In the case of Go and more generally bandit-based
Monte-Carlo planning, we use one bandit at each
node of the tree, as explained in section 1. The dif-
ficult elements are the anytime nature of the problem,
its non stationarity (Hussain et al., 2006; Kocsis and
Szepesvari, 2006b), its large number of arms (Banks
and Sundaram, 1992). The side information (usually
termed AMAF) is detailed below.
This section provides an overview of bandit-based
Monte-Carlo planning algorithms. It is presented in
the case of a game; the experiments are performed in
the case of Go. We point out that UCT can be applied
to trees far from minimax problems: max/max prob-
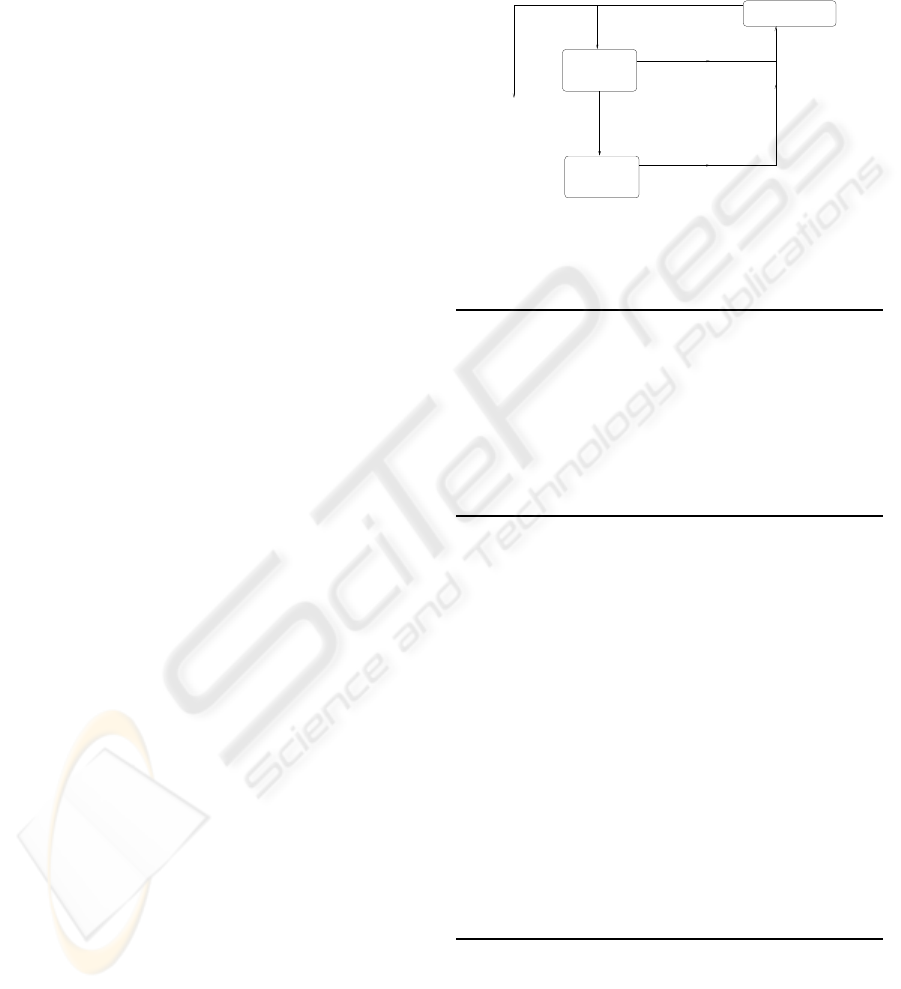
lems, or max/Expectation, etc. Algorithm 1 provides
an overview (see also flowchart in Fig. 1), and Algo-
rithm 3 provides a more detailed presentation. The
Choose a path
in the tree
(using statistics)
Node L’ out
of the tree
Simulation
over
Simulation S’
out of the tree
Complete
Game
Update the
and reward
and its reward
tree and its statistics
Time left > 0 ?
Yes
No
Decision
(most simulated
move from the root)
from L’ to game
Simulation
S in the tree
of the tree
and node L’ out
S,L,L’,S’
Figure 1: Flow chart of UCT. The bandit algorithm is ap-
plied in the simulation part in the tree.
Algorithm1: Monte-Carlo planning algorithm. The final
line chooses the decision with the conservative rule that the
most simulated decision should be chosen. Other solutions,
such as taking the decision with the higher ratio ”number
of winning simulations divided by the number of simula-
tions”, are too much dangerous because a decision might
be very poor due to a small number of simulations. Some
other robust and elegant techniques include the use of lower
confidence bounds. Here, rewards are binary (win or loss),
but arbitrary distributions of rewards can be used.
Initialize T to the root, representing the current state. T is
a tree of positions, with each node equipped with statis-
tics.
while Time left > 0 do
Simulate one game until a leaf (a position) L of T
(thanks to bandit algorithms). Then, choose one son
(a successor) L
′
of L.
Simulate one game from position L
′
until the game is
over.
Add L
′
as a son of L in T.
Update statistics in all the tree. In UCT, each node
knows how many winning simulations (from this
node) have been performed and how many simula-
tions (from this node) have been performed. In other
forms of tree-search, other informations are neces-
sary (heuristic information in AMAF, total number
of nodes in the tree in BAST(Coquelin and Munos,
2007)).
end while
Pick up the decision which has been simulated most often
from the root.
main point in Algorithm 1 is that the tree is unbal-
anced, with a strong bias in favor of important parts
of the tree. The function used for taking decisions out
of the tree (i.e. the so-called Monte-Carlo part) is de-
fined in (Wang and Gelly, 2007) The function used
for simulating in the tree is presented in Algorithm
THE PARALLELIZATION OF MONTE-CARLO PLANNING - Parallelization of MC-Planning
245
2. This function is a main part of the code: it de-
cides in which direction the tree should be extended.
There are variousformulas, all of them being based on
the idea of a compromise between exploitation (fur-
ther simulating the seemingly good moves) and ex-
ploration (further simulating the moves which have
not been explored a lot). The empirically best tool in
Algorithm 2: Taking a decision in the tree. The total
number of simulations at situation s is Simulations(s) =
∑
d
Simulations(s,d). We present here various formulas for
computing the score (see (Lai and Robbins, 1985; Auer
et al., 2001; Gelly and Silver, 2007) for UCB1, UCB-
Tuned and AMAF respectively); other very important vari-
ants (for infinite domains, larger number of arms, of spe-
cific assumptions) can be found in (Banks and Sundaram,
1992; Agrawal, 1995; Dani and Hayes, 2006; Coquelin and
Munos, 2007).
Function decision = Bandit(situation s in the tree).
for d in the set of possible decisions do
Let ˆp(d) = Wins(s,d)/Simulations(s,d).
SWITCH (bandit formula):
- UCB1: compute score(d) = ˆp(d) +
p
2log(Simulations(s))/Simulations(s,d).
- UCB-Tuned.1: compute score(d) = ˆp(d) +
q
ˆ
V log(Simulations(s))/Simulations(s,d) with
ˆ
V = max(0.001, ˆp(d)(1− ˆp(d))).
- UCB-Tuned.2: compute score(d) = ˆp(d) +
q
ˆ
V log(Simulations(s))/Simulations(s,d) +
log(Simulations(s))/Simulations(s,d) with
ˆ
V = max(0.001, ˆp(d)(1− ˆp(d))).
- AMAF-guided exploration: Compute
score(d) = α(d) ˆp(d) + (1−α(d))
ˆ
ˆp(d) with:
-
ˆ
ˆp(d) the AMAF-estimate of the asymptotic
value of score(d).
- α(d) a coefficient depending on
Simulations(s,d) and the AMAF-confidence
in
ˆ
ˆp(d) (see (Gelly and Silver, 2007)).
END SWITCH
end for
Return argmax
d
score(d).
Algorithm 2 is the AMAF-guided exploration. In that
case, in the classical formalism of bandits, each time
one arm is played, we get: (i) a positive or null reward
for the chosen arm (0 or 1); (ii) a list of arms, consist-
ing in half of the arms roughly, positively correlated
with the list of arms for which the rewards would
have been positive if these arms have been played.
The bandit algorithm for this bandit problem has been
empirically derived in (Gelly and Silver, 2007). To
the best of our knowledge, there’s no mathematically
grounded bandit algorithm in that case. An important
improvement (termed progressive widening(Coulom,
2007)) of Algorithm 2 consists in considering only
the K(n) ”best” moves (the best according to some
heuristic), at the n
th
simulation in a given node, with
K(n) is an non-decreasing mapping from N to N.
Algorithm 3: More detailed Monte-Carlo planning algo-
rithm.
Initialize T to the root, representing the current state. T
is a tree of positions.
while Time left > 0 do
Simulate one game until a leaf (a position) L of T
(thanks to bandit algorithms applied until a leaf is met,
see Algorithm 2).
Choose one son (a successor) L
′
of L, possibly with
some offline learning (Gelly and Silver, 2007).
Simulate one game from position L
′
until the game is
over.
Add L
′
as a son of L in T.
Update statistics in all the tree. In UCT, each node
knows how many winning simulations (from this
node) have been performed and how many simula-
tions (from this node) have been performed. In other
forms of tree-search, other informations are neces-
sary (heuristic information in AMAF, total number
of nodes in the tree in BAST(Coquelin and Munos,
2007)).
end while
Pick up the decision which has been simulated most often
from the root.
2 MULTI-CORE
PARALLELIZATION
The multi-core parallelization is intuitively the most
natural one: the memory is shared. We just have
to distribute the loop on various threads (each thread
performs simulations independently of other threads,
with just mutexes protecting the updates in memory),
leading to algorithm 4. Consider N the number of
Algorithm 4: Multi-core Monte-Carlo planning algorithm.
Initialize T to the root, representing the current state. T
is a tree of positions.
For each thread simultaneously:
while Time left > 0 do
Simulate one game until a node (=position) L of T
(thanks to bandit algorithms); put this simulation S in
memory. Choose a successor L
′
of L.
Simulate one game from position L
′
until the game is
over; put this simulation S
′
in memory.
Add L
′
as a son of L in T.
Update statistics in all the tree thanks to S and S
′
.
end while
Pick up the decision which has been simulated most of-
ten.
threads. The number of simulations per second is
typically almost multiplied by N. However, this algo-
rithm is not equivalent to the sequential one: possibly,
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
246
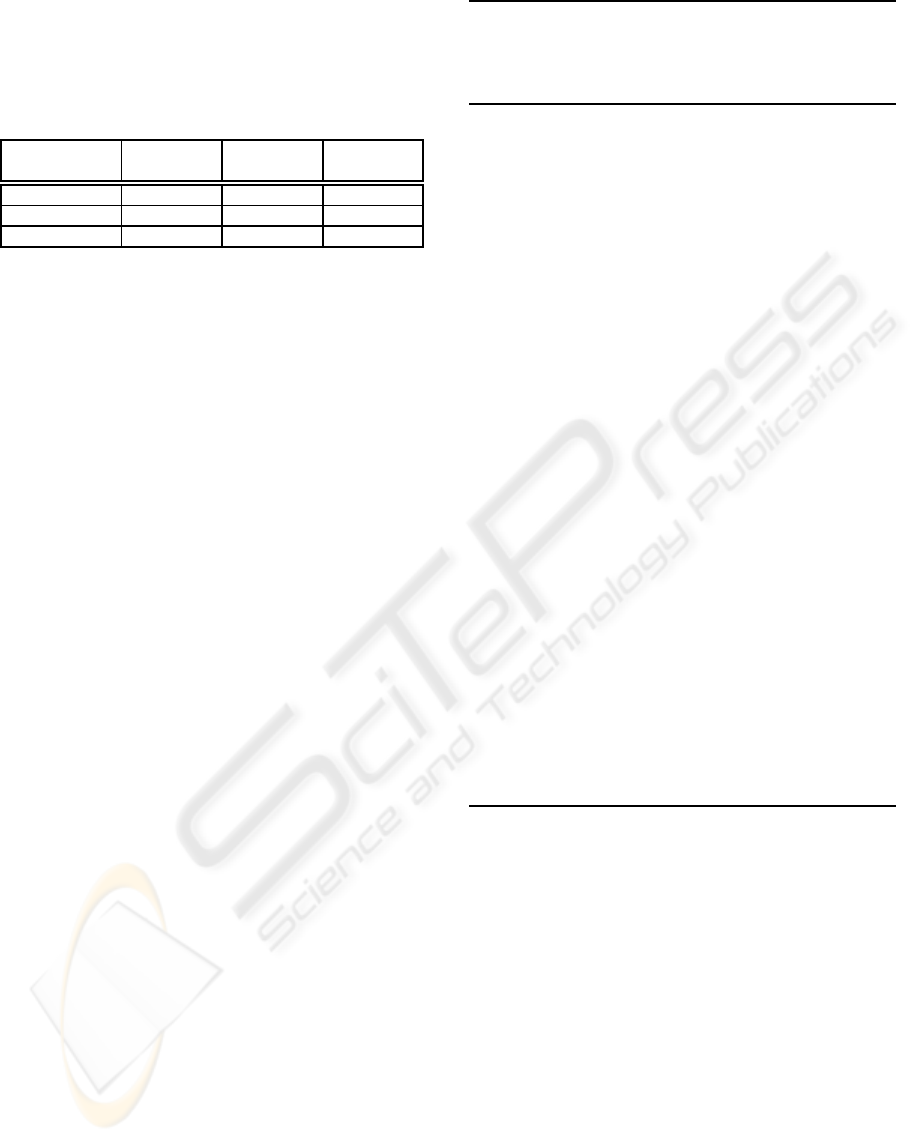
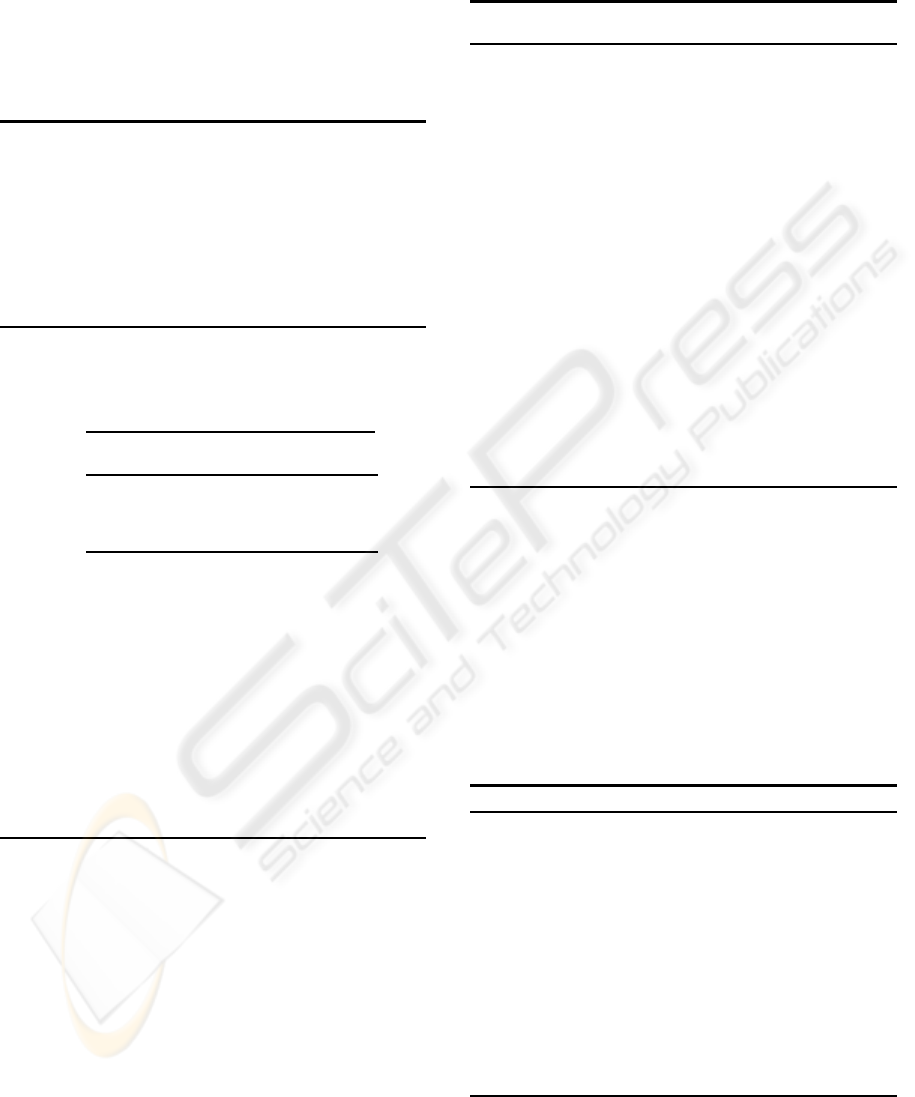
Table 1: Success rate against mogoRelease3, for various
computation times. Under the two-assumptions (1) almost
N times more simulations per second with N cores (2) no
impact of the ”delay” point pointed out in the text, the
speed-up would be linear and all the raws would be equal.
We see a decay of performance for 4 threads.
Nb threads × 10 20 40
comp. time sec.procs secs.procs secs.procs
1 thread 51.1 ± 1.8 62.0 ± 2.2 74.4 ± 2.4
2 threads 62.9 ± 1.8
4 threads 66.4 ± 2.1
N−1 simulations are running when one more simula-
tion is launched, and the updates of T corresponding
to these N − 1 simulations are not taken into account.
There is a N − 1 delay, and the analysis of the delay is
not straightforward - we will quantify this effect ex-
perimentally. We get the following empirical results:
Table 1 confirms the roughly 63% success rate known
when doubling the computational power. As a con-
clusion, in 9x9 Go, the speed-up of the multi-core al-
gorithm 4 is linear for two nodes, slightly below the
linear speed-up for 4 nodes (by interpolation, we can
estimate the speed-up as 3 for 4-cores).
3 CLUSTER PARALLELIZATION
First, let’s consider the generalization of the multi-
core approach to a cluster, i.e. a version with mas-
sive communication in order to keep roughly the same
state of the memory on all nodes. As the mem-
ory is not shared here, we have to broadcast on the
network many update-informations; each simulation
on one node leads to one broadcast. Possibly, we
can group communications in order to reduce laten-
cies. This leads to the algorithm 5. T = 0 is per-
haps possible, for high performance clusters or pro-
cessors inside the same machine. Let’s consider the
idealized case of a cluster with negligible communi-
cation cost and infinite number of nodes. Let’s as-
sume that a proportion α of time is spent in the up-
dates. Also, let’s assume that the delay of updates
does not reduce the overall efficiency of the algo-
rithm. What is the speed-up in that case ? Consider
M the number of simulations per second on one node
in the (mono-node) case. With N nodes, at each time
steps, we get NM simulations. The number of up-
dates is therefore NM per second of simulation. If
the time of one update is T, for each group of M
simulations, (i) each node performs M simulations
(costs 1− α second); (ii) each node sends M update-
information (costs 0 second); (iii) each node receives
Algorithm 5: Cluster algorithm for Monte-Carlo planning.
As there are many paths leading to the same node, we must
use a hash table, so that with some key (describing a goban)
we can find if a node is in the tree and what are its statistics
in constant time.
for Each node do
Initialize T to the root, representing the current state
of the root. T is a tree of positions, with statistics at-
tached to each node.
end for
for For each computer simultaneously: do
for For each thread simultaneously: do
while Time left > 0 do
Simulate one game until a node (=position) L of
T (thanks to bandit algorithms); put this simula-
tion S in memory. Choose a successor L
′
of L.
Simulate one game from position L
′
until the
game is over; put this simulation S
′
in memory.
S,S
′
is a complete game starting at the root.
Add L
′
as a son of L in T, and update all the
statistics in T with S, S
′
.
Add (L, L
′
,S, S
′
) to a stack of to-be-sent simula-
tions.
if time−t0 ≥ T and thread=first thread then
Set t0 = time.
Send all the (L,L
′
,S, S
′
) in the stack to all
other nodes.
Reset the stack.
Receive many (L,L
′
,S, S
′
) from all other
nodes.
for Each (L,L
′
,S, S
′
) received do
Add L
′
as a son of L in T (if not present).
Update all the statistics in T with S, S
′
.
end for
end if
end while
end for
end for
Pick up the decision which has been simulated most of-
ten.
(N − 1)M update-informations (costs 0 second); (iv)
each node updates its tree with these (N − 1)M up-
date informations (costs α(N − 1) second). If we di-
vide by the number N of nodes and let N → ∞, we
get (i) a cost (1− α)/N → 0; (ii) a cost 0 for send-
ing update-informations; (iii) a cost 0 for receiving
update-informations; (iv) a cost α(N − 1)/N → α for
updates. This implies that the main cost is the update-
cost, and that asymptotically, the speed-up is 1/α. In
the case of MoGo, this leads to α ≃ 0.05 and there-
fore roughly 20 as maximal speed-up for the case of a
tree simultaneously updated on all nodes. As commu-
nications are far from negligible, as preliminary ex-
periments were disappointing and as we expect better
than the 20 speed-up, we will not keep this algorithm
in the sequel.
THE PARALLELIZATION OF MONTE-CARLO PLANNING - Parallelization of MC-Planning
247
3.1 An Alternate Solution with Less
Communications
Section 3 showed that whenever communications are
perfect, the speed-up
1
is limited to some constant
1/α, roughly 20 in MoGo. We propose the follow-
ing algorithm (Algorithm 6), with the following ad-
vantages: (1) much less communications (can run on
usual ethernet); (2) tolerant to inhomogeneous nodes
(as other algorithms above also); (3) our implemen-
tation is not yet fault-tolerant, but it could be done;
(4) self-assessment possible (strong variance → more
time). The algorithm is detailed in Algorithm 6.
Algorithm 6: Algorithm for Monte-Carlo planning on a
cluster.
Initialize T to the root, representing the current state. T
is a tree of positions. T is the same on all computers.
for Each computer simultaneously: do
for Each thread simultaneously: do
while Time left > 0 do
Simulate one game until a node (=position) L of
T (thanks to bandit algorithms).
Choose one son L
′
of L.
Simulate one game from position L
′
until the
game is over.
Add L
′
as a son of L in T
0
.
Thread 0 only: if time −t0 ≥ T
0
, set t0 = time,
and average statistics in all the tree for nodes of
depth ≤ K with at least N
min
simulations.
end while
end for
end for
Decision step:Pick up the decision which has been sim-
ulated most often, on the whole set of nodes.
An important advantage of this technique is that
averaging vectors of statistics is possible quickly on
a large number of nodes: the computational cost of
this averaging over N nodes is O(log(N)). The case
T
0
= ∞ in Algorithm 6 (no communication before the
final step of the decision making) is just a form of
averaging. For computer-go, we get 59 %± 3% of
success rate with an averaging over 43 machines ver-
sus a single machine, whereas a speed-up 2 leads to
63%. This means that averaging provides a speed-up
less than 2 with 43 machines; this is not a good par-
allelization. We then experiment T
0
finite and K = 0
(i.e. only the root of the tree is shared between nodes):
1
This is not a ”real” speed-up, as the parallel algorithm,
even in the multi-core case, is not equivalent to the sequen-
tial one - the difference is the ”delay” detailed in section 2.
We here consider that the speed-up is k if the parallel algo-
rithm is as efficient as the sequential one with k times more
time.
Number T
0
(time Success Estimated
N of between rate Speed-up
nodes updates) divided
by N
3 1.00s 67.2 ± 3.5 0.95 (9x9)
3 0.11s 67.3 ± 2.1 0.94 (9x9
4 0.33s 69.6 ± 1.5 0.81 (9x9)
9 0.33s 79.0 ± 1.0 (9x9)
9 0.11s 83.8 ± 5.4 (19x19)
We have no estimate for the 9-machines speed-
up, because comparing computational budget B with
9 machines and 9B with 1 machine implies the use
of games with average time per move 5.B, which re-
quires a lot of computational power. However, the
83.8% is in the extrapolation of linear speed-up. The
results were not significantly different with higher
numbers of levels. We guess that for larger numbers
of nodes the results will be different but we have not
yet any empirical evidence of this.
4 CONCLUSIONS
Computer-Go is both a main target for computer-
games, as the main unsolved game, and a challeng-
ing planification problem as the most promising ap-
proaches have a moderate expert knowledge and are
therefore quite general. In particular, successful ap-
plications of the UCT approach have been reported
very far from computer-Go (Kocsis and Szepesvari,
2006a). A main advantage of the approach is that it is
fully scalable. Whereas many expert-based tools have
roughly the same efficiency when doubling the com-
putational power, bandit-based Monte-Carlo planning
with time 2B has success rate roughly 63% against
a bandit-based Monte-Carlo planning algorithm with
time B. This leads to the hope of designing a paral-
lel platform, for an algorithm that would be efficient
in various tasks of planifications. The main results in
this paper are the followings:
- Doubling the computational power (doubling the
time per move) leads to a 63% success rate against
the non-doubled version.
- The straightforward parallelization on a cluster (im-
itating the multi-core case by updating continuously
the trees in each node so that the memory is roughly
the same in all nodes) does not work in practice and
has strong theoretical limitations, even if all compu-
tational costs are neglected.
- A simple algorithm, based on averages which are
easily computable with classical message passing li-
braries, a few times per second, can lead to a great
successes; in 19x19, we have reached, with 9 nodes,
84 % success rate against one equivalent node. This
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
248

success rate is far above simple voting schemas, sug-
gesting that communications between independent
randomized agents are important and that communi-
cating only at the very end is not enough.
- Our two parallelizations (multi-core and cluster) are
orthogonal, in the sense that: (i) the multi-core paral-
lelization is based on a faster breadth-first exploration
(the different cores are analyzing the same tree and go
through almost the same path in the tree; in spite of
many trials, we have no improvement by introducing
deterministic or random diversification in the differ-
ent threads. (ii) the cluster parallelization is based
on sharing statistics guiding the first levels only of
the tree, leading to a natural form of load balancing.
The deep exploration of nodes is completely orthog-
onal. Moreover, the results are cumulative; we see
the same speed-up for the cluster parallelization with
multi-threaded versions of the code or mono-thread
versions.
- In 9x9 Go, we have roughly linear speed-up until
4 cores or 9 nodes. The speed-up is not negligible
beyond this limit, but not linear. In 19x19 Go, the
speed-up remains linear until at least 4 cores and 9
machines.
Extending these results to higher numbers of ma-
chines is the natural further work. Increasing the
number of cores is difficult, as getting an access to a
16-cores machine is not easy. Monte-Carlo planning
is a strongly innovative tool with more and more ap-
plications, in particular in cases in which variants of
backwards dynamic programming do not work. Ex-
trapolating the results to the human scale of perfor-
mance is difficult. People usually consider that dou-
bling the computational power is roughly equivalent
to adding almost one stone to the level. This is con-
firmed by our experiments. Then, from the 2nd or 3rd
Kyu of the sequential MoGo in 19x19, we need 10 or
12 stones for the best human level. Then, we need
a speed-up of a few thousands. This is far from im-
possible, if the speed-up remains close to linear with
more nodes.
REFERENCES
Agrawal, R. (1995). The continuum-armed bandit problem.
SIAM J. Control Optim., 33(6):1926–1951.
Auer, P., Cesa-Bianchi, N., and Gentile, C. (2001). Adap-
tive and self-confident on-line learning algorithms.
Machine Learning Journal.
Banks, J. S. and Sundaram, R. K. (1992). Denumerable-
armed bandits. Econometrica, 60(5):1071–96. Avail-
able at http://ideas.repec.org/a/ecm/emetrp/
v60y1992i5p1071-96.html.
Barto, A., Bradtke, S., and Singh, S. (1993). Learning to
act using real-time dynamic programming. Technical
Report UM-CS-1993-002.
Bellman, R. (1957). Dynamic Programming. Princeton
Univ. Press.
Berry, D. A., Chen, R. W., Zame, A., Heath, D. C., and
Shepp, L. A. (1997). Bandit problems with infinitely
many arms. Ann. Statist., 25(5):2103–2116.
Bertsekas, D. (1995). Dynamic Programming and Optimal
Control, vols I and II. Athena Scientific.
Bruegmann, B. (1993). Monte carlo go. Unpublished.
Cazenave, T. and Helmstetter, B. (2005). Combining tacti-
cal search and monte-carlo in the game of go. IEEE
CIG 2005, pages 171–175.
Coquelin, P.-A. and Munos, R. (2007). Bandit algorithms
for tree search. In Proceedings of UAI’07.
Coulom, R. (2006). Efficient selectivity and backup opera-
tors in monte-carlo tree search. In P. Ciancarini and
H. J. van den Herik, editors, Proceedings of the 5th
International Conference on Computers and Games,
Turin, Italy.
Coulom, R. (2007). Computing elo ratings of move patterns
in the game of go. In van den Herik, H. J., Uiterwijk,
J. W. H. M., Winands, M., and Schadd, M., editors,
Computer Games Workshop, Amsterdam.
Dani, V. and Hayes, T. P. (2006). Robbing the bandit:
less regret in online geometric optimization against
an adaptive adversary. In SODA ’06: Proceedings
of the seventeenth annual ACM-SIAM symposium on
Discrete algorithm, pages 937–943, New York, NY,
USA. ACM Press.
Gelly, S. and Silver, D. (2007). Combining online and
offline knowledge in uct. In ICML ’07: Proceed-
ings of the 24th international conference on Machine
learning, pages 273–280, New York, NY, USA. ACM
Press.
Hussain, Z., Auer, P., Cesa-Bianchi, N., Newnham, L., and
Shawe-Taylor, J. (2006). Exploration vs. exploitation
challenge. Pascal Network of Excellence.
Kocsis, L. and Szepesvari, C. (2005). Reduced-variance
payoff estimation in adversarial bandit problems. In
Proceedings of the ECML-2005 Workshop on Rein-
forcement Learning in Non-Stationary Environments.
Kocsis, L. and Szepesvari, C. (2006a). Bandit-based monte-
carlo planning. ECML’06.
Kocsis, L. and Szepesvari, C. (2006b). Discounted-ucb. In
2nd Pascal-Challenge Workshop.
Lai, T. and Robbins, H. (1985). Asymptotically efficient
adaptive allocation rules. Advances in Applied Math-
ematics, 6:4–22.
Powell, W.-B. (2007). Approximate Dynamic Program-
ming. Wiley.
Wang, Y. and Gelly, S. (2007). Modifications of UCT and
sequence-like simulations for Monte-Carlo Go. In
IEEE Symposium on Computational Intelligence and
Games, Honolulu, Hawaii, pages 175–182.
THE PARALLELIZATION OF MONTE-CARLO PLANNING - Parallelization of MC-Planning
249
