
TOWARD ONTOLOGIES AND SERVICES FOR ASSISTING
INDUSTRIAL ROBOT SETUP AND INSTRUCTION
Mathias Haage, Anders Nilsson and Pierre Nugues
Department of Computer Science, Lund University, Box 118, 22100 Lund, Sweden
Keywords:
Industrial robot, ontology, web services, multimodal dialogue.
Abstract:
Achieving rapid, intuitive, and error-free robot setup and instruction is a challenge. We present our work
towards an assistive infrastructure for robot setup and instruction that attempts to address it. In this paper, we
describe the ongoing development of a system that automatically generates multimodal dialogue interaction
from product and process ontologies. The prototype currently generates two modalities, digital paper and
spoken dialogue.
1 INTRODUCTION
Traditional robotics supports long-batch production
and requires skilled personnel to handle setup and in-
struction. On the contrary, new robot markets often
involve shorter series and small and medium enter-
prises. This means that the shift of products is faster
and the change-overs often need to be carried out by
non-experts. This sets new challenges for the robot
user interfaces to be more intuitive and user friendly
in order to reduce number of errors and cost/time
(Haegele, 2007). Such challenges outline the need for
assistive systems within the robot cell to make the op-
erator less dependent on expert knowledge and turn
complex tasks feasible. Examples that could benefit
from assistance include calibration of tools, fixtures,
and workpieces; usage of CAD/CAPP/CAM soft-
ware such as task planners; configuration of process-
specific software packages, such as the ABB palletiz-
ing PowerPac.
In this paper, we present an assistive infrastructure
for robot setup and instruction that attempts to address
these challenges. We introduce the ongoing develop-
ment of a system based on semantic web technologies
that automatically generates multimodal dialogue in-
teraction. We also describe a prototype that currently
generates two modalities, digital paper and spoken di-
alogue.
The purpose of an assistive system is to enhance
the usability and usefulness of the robot and its
connected resources (sensors, CAD/CAPP/CAM sys-
tems) through:
• The use of semantic standards in information ex-
change, such as RDF/S, OWL, SPARQL, and
SWRL;
• Production documents such as product and pro-
cess data including a semantic layer;
• The definition of compatible semantic layers so
that they can be used across the relevant tasks,
such as aiding cell calibration and robot instruc-
tion.
• Increased automation of tasks using the seman-
tic layer, such as finding calibration sequences to
make sure nothing is forgotten.
The roadmap we follow to implement the assis-
tive infrastructure is based on the use of an ontologi-
cal network to encapsulate knowledge about the prod-
uct data and manufacturing processes. It requires the
derivation of ontology concepts that will serve as the
main data source to generate — or refer to — the
complete specifications and the operating instructions
used to automate information management necessary
for task planning and execution.
2 MULTIMODAL FORM-BASED
DIALOGUE
From the user viewpoint, the operation starts with an
initial selection command from the operator to tell the
machine which work piece to produce and possibly
263
Haage M., Nilsson A. and Nugues P. (2008).
TOWARD ONTOLOGIES AND SERVICES FOR ASSISTING INDUSTRIAL ROBOT SETUP AND INSTRUCTION.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics, pages 263-270
DOI: 10.5220/0001505002630270
Copyright
c
SciTePress

from positions and equipment data sensed by devices
on the floor.
After the initial selection, the system extracts data
from the ontology that enables the operator to config-
ure the task and the product, and to prepare the task
execution. The configuration step uses a multimodal
interface that lets the operator fill in the different op-
tions. It ends with the monitoring and execution of
the configured task.
The process flow uses conversion tools such as
transformation rules, inference rules, and the JastAdd
compiler (JastAdd, 2007) to select and convert por-
tions of the ontology. This results in process and
product data divided into configurable and noncon-
figurable parts (Figure 1). The extracted data are first
formatted as an XML document corresponding to a
production sketch that we call the XML appconf.
From this sketch, the system automatically gener-
ates user interfaces with multiple input modalities for
all the parameters. A first demonstration prototype
will be available in Spring 2008.
3 ONTOLOGY MODELING
In computer science, ontologies correspond to hier-
archical models to represent concepts, objects, and
their relationships. They enable systems to (Buitelaar,
2007):
• Encode and interpret data using a rich hierarchical
and relational structure.
• Extract data and integrate them into applications.
• Share data with a common format.
As ontology modeling language, we have chosen the
web ontology language (McGuinness and van Harme-
len, 2007) and the Prot´eg´e toolkit (Prot´eg´e, 2007)
as a data entry and validation tool. Both are well-
established standards in their domain with a large de-
veloper’s community. We are currently using them to
build the ontology of a specific domain shown in Fig-
ure 2 that serves in the demonstration prototype. This
ontology acts as an advanced data repository for the
product configuration and the production operations.
In the future, we will populate ontologies from man-
ual modeling, specification databases, and 3D mod-
els. In addition to what we develop within SMErobot,
the data model we will use could also possibly benefit
from work being carried out at LTH for the SIARAS
project (SIARAS, 2007) on production ontologies.
The conversion pipeline shown in Figure 1 uses
W3C recommendations associated with the semantic
web such as XSLT or SWRL. The choice of these
tools needs some clarification. We first summarize
Figure 2: An excerpt of the ontology detailing the operation
hierarchy.
the concepts that are around OWL and then explain
the conversion principles.
3.1 Resource Description Framework -
RDF
OWL is based on the resource description framework,
RDF (RDF, 2007). RDF models statements as triples
in the form of a subject, a predicate (a verb), and an
object. As an example, the statement the milling pro-
cess starts with a calibration can be split into a sub-
ject, the milling process, a predicate, starts with, and
an object, a calibration. Such triples are also named,
respectively, the resource, the property, and the value.
RDF is restricted to binary predicates.
This framework can use two encodings. The first
one, called Notation 3, consists of sequences of tex-
tual triples and the second one adopts an XML syn-
tax. The subject – the resource – must be a URI.
The predicate or property, which is also a resource,
is a URI too. The object or value can be a resource
or a literal. To represent the example above, we use
the lrc namespace – Lund Robotics Core – and URI
http://cs.lth.se/lrc/ontologies/1.0/. This URI is still
nonexistent when this article is being written. Using
Notation 3, we can represent the example above as:
@prefix lrc: <http://cs.lth.se/lrc/ontologies/1.0/>.
<#milling_process> lrc:starts_with "calibration";
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
264
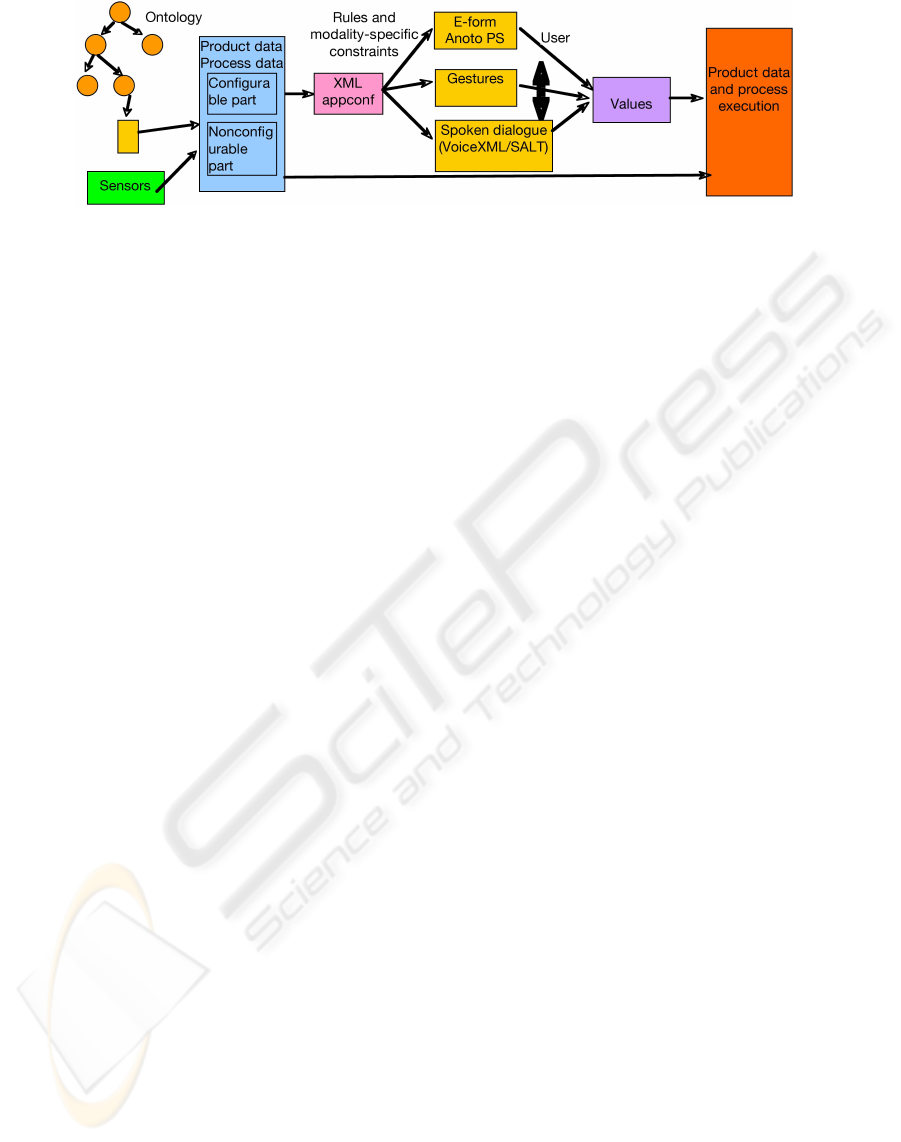
Figure 1: The process workflow.
And in XML syntax as:
<rdf:RDF
xmlns:rdf="http://www.w3.org/1999/02/22-rdf-syntax-ns#"
xmlns:lrc="http://cs.lth.se/lrc/ontologies/1.0/">
<rdf:Description rdf:about="#milling_process">
<lrc:starts_with>calibration</lrc:starts_with>
</rdf:Description>
</rdf:RDF>
More generally, triples (subject, predicate, ob-
ject) can be encoded in Prolog or Datalog as predi-
cate(subject, object) that is, with the sentence above
as:
starts_with(milling_process, calibration)
3.2 RDF Schema – RDFS
RDF schema, RDFS, is built on RDF and defines
two predicates that enable the programmer to build
an ontology: rdfs:Class and rdfs:subClassOf (RDFS,
2007). The rdfs:Class element allows to declare a
RDF resource as a class and the rdfs:subClassOf ele-
ment allows to declare subclasses of a class and build
a hierarchy. When a resource has been declared as a
class, we can use rdf:type to create individuals mem-
ber of this class. In addition, RDFS comprises similar
predicates to build a property hierarchy.
In addition, RDFS has constructs to type the sub-
ject and the object of the triples. It corresponds to
the domain and range of a function, and in the case
of RDFS applies to properties. RFDS uses the con-
structs rdfs:domain for the subjects and rdfs:range for
the objects to restrict the values of the two arguments
of a property.
3.3 OWL
Although the combination of RDF and RDFS forms
an ontology language, it lacks some features to build
large, realistic ontologies. They include cardinality
restrictions, Boolean operations on classes, etc. In ad-
dition, RDF and RDFS are not well coupled to logic
and reasoning tools.
The web ontology language, OWL, is an extension
of RDF and RDFS that attempts to complement them
with better logic foundations and a support for practi-
cal reasoning (McGuinness and van Harmelen, 2007).
It comes with three flavors of increasing expressivity
– light, description logic, and full – that are upward
compatible. Only the two first ones are guaranteed to
be tractable in practice.
Important constructs of OWL include
the owl:Class, which is derived from the
rdfs:Class, two properties, owl:ObjectProperty
and owl:DatatypeProperty, that relate objects to
respectively another object or a data type value like
a string, an integer, a float, etc., owl:Restriction
that enables the programmer to use existential and
universal quantifiers and cardinality.
4 PROTOTYPE SETUP
4.1 Nameplate Manufacturing
As described in (SMErobot, 2007b), the ontology
programming approach uses automatically generated
forms to select and configure both the task and the
product. The prototype selected to demonstrate the
concepts associated with our approach corresponds to
the manufacturing of wood nameplates.
Figure 3 shows a configuration form where the left
column configures the shape and looks of the plate.
The right column configures the process for manufac-
turing the plate. In this example it is possible to skip
steps, execute in a stepwise manner, and choose data
acquisition methods for steps involved. The left col-
umn can be filled out at an earlier date while the right
column is filled out close to task execution time. The
upper right barcode identifies the process and is pos-
sibly unique to individualize the sheet.
TOWARD ONTOLOGIES AND SERVICES FOR ASSISTING INDUSTRIAL ROBOT SETUP AND INSTRUCTION
265

Figure 3: Prototype form for manufacturing wood name-
plates.
4.2 Nameplate Manufacturing Ontology
We have built a prototype ontology to encode the pro-
cess templates and we are developing well-defined
conceptual interfaces toward work cells (equipment,
capabilities, communication) and process data, assist-
ing construction of process templates, and assisting
(manual/automatic) work cell reconfiguration.
The ontology is restricted to the prototype domain
and Figure 2 shows an excerpt of it. It describes the
finished products its components, together with pos-
sible features as well as the operations involved in the
manufacturing process of the product.
4.3 Intermediate Appconf
Representation
Given a product to manufacture, the conversion pro-
cess extracts an intermediate, flat representation from
the ontology. This representation is designed to be
modality-independent, which makes it easier to build
user views (forms, speech, gestures). We call it the
application configuration – appconf.
As an example, in the application prototype we
are building, the sheet requires the operator to sup-
ply data, such as the corner shape, the hole configu-
ration, and the pattern and text (person name for in-
stance). All these items are shown as input areas on
the sheet in Figure 3. The intermediate appconf rep-
resentation has corresponding elements representing
all these configurable items, for instance the corner
shape.
We give an idea of how to represent the corner
shape options in the XML code snippet below. This
code replicates the possible options, sharp, soft, or cut
corners, with the images to display in the e-form using
the img element and the messages to utter using the
snd element in the case of a spoken dialogue.
<shape>
<one-of>
<option>
<name>sharp corners</name>
<command code="sharp.cd"/>
<img src="sharp.jpg"/>
<snd src="sharp.wav"/>
</option>
<option>
<name>soft corners</name>
<command code="soft.cd"/>
<img src="soft"/>
<param name="diameter" unit="mm"/>
</option>
<option>
<name>cut corners</name>
<command code=".cd"/>
<img src="cut.jpg"/>
<param name="height" unit="mm"/>
</option>
</one-of>
</shape>
Using this configuration sketch, presentation
rules, and modality specific constraints, the conver-
sion process produces displayable forms or spoken
dialogues so that the operator can supply the missing
parameters. Once the operator has filled in the data,
the corresponding XML fragment is:
<shape>
<name>sharp corners</name>
<command code="sharp.cd"/>
<img src="sharp.jpg"/>
<snd src="sharp.wav"/>
</shape>
4.4 Methods and Languages to Extract
Information from Ontologies
The conversion pipeline extracts and infers informa-
tion from the ontology and generates the user input
modalities. The appconf configuration sketch is an
XML intermediate document between the ontology
and the user interfaces. Unlike the sketch, the on-
tology is a structured and hierarchical representation,
where features are shared and inherited across a va-
riety of pieces and processes. This means that ex-
traction is not trivial because the representation lan-
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
266

guages involve three complex and intricate layers:
RDF, RDFS, and OWL.
Such a setting requires specific query languages
and techniques. In addition to the ontology manage-
ment, we need to process other XML documents in
the processing chain such as the appconf sheet to con-
vert them into forms or dialogue programs. We review
here techniques and their application in the manage-
ment of information along the conversion chain. They
include accessing XML nodes, querying RDF triples,
and reasoning about the ontology knowledge. Most
difficulties come from the apparent masses of “solu-
tions”. Wikipedia lists not less than 11 different RDF
query languages and ten OWL reasoners! We focus
here on what have become the (likely) standards in
their respective ecosystems.
4.4.1 XSLT
The simplest way to access and transform XML doc-
uments is to use the combination of XPath and the
extensible stylesheet language transformations, XSLT
(XSLT, 2007). XPath enables programmersto express
a path and access nodes in an XML tree, while XSLT
defines conversion rules to apply to the nodes. A typi-
cal application of XSLT is the transformation of XML
documents into XHTML files destined to be read by
web browsers.
Provided that the amount of paraphrasing (syn-
tactic variation) is limited, XSLT XPath is fairly us-
able to run the conversions. From studies we have
done, this is the case for the conversion of the app-
conf sketch to the user modalities. We are completing
the implementation and integrating it in the prototype.
However, this is not the case for ontologies. They
are built on OWL, which is built with RDF triples,
which allows reformulating similar structures using
different constructs. Querying ontologies require ei-
ther query languages or reasoning rules. For a justifi-
cation, see (Antoniou and van Harlmelen, 2004), pp.
100-102.
4.4.2 SPARQL
SPARQL (SPARQL, 2007) is a RDF query language.
It enables the programmer to extract RDF triples us-
ing the SELECT keyword where the variables are de-
noted with a question mark prefix using a set of condi-
tions defined by the WHERE keyword. It is also pos-
sible to build a new graph using the CONSTRUCT
keyword. SPARQL’s syntax is similar to that of the
SQL language. The query below extracts all the pairs
where ?subject is a subclass of ?object:
SELECT ?subject ?object
WHERE {
?subject rdfs:subClassOf ?object. }
However, as SPARQL makes the join operation
implicit, it bears some resemblance with Prolog as in
this query:
SELECT ?subject ?config
WHERE {
?subject rdfs:subClassOf <#FinishedProduct> .
?prop rdf:type owl:ObjectProperty .
?prop rdfs:range ?config . }
SPARQL is becoming a de facto standard for RDF.
It is a stable language with a quality implementations
from various sources. Competitors include XQuery, a
generic XML query language, which has not gained
acceptance in the RDF community.
4.4.3 SWRL
While SPARQL enables a programmer to extract in-
formation from an ontology, it is only designed for
RDF. In addition, it cannot easily derive logical con-
sequences from its results. To exploit fully the ontol-
ogy knowledge, one needs a reasoning or inferencing
mechanism. This is the purpose of a language like the
semantic web rule language, SWRL (SWRL, 2007).
SWRL rules have a Prolog-like structure. They con-
sist of an antecedent corresponding to a conjunction
of conditions (predicates) and a consequent. When
the conditions are true, the consequent is also true and
can be asserted. In addition to being a inference lan-
guage, SWRL features an extension that lets it act like
a query language, SQWRL.
SWRL is supported from the 3.4 version of
Prot´eg´e in the form of a development environment
with editing tools. This means that we can write,
modify, and to a certain extent validate rules. How-
ever, version 3.4 is still in the beta stage at the time
we are witing this paper. In addition, Prot´eg´e does not
include a full-fledged inference engine. This means
that it cannot by itself execute the rules. It just sup-
plies a bridge that connects to an external module. So
far, Prot´eg´e supports only one inference engine, Jess
(Friedman-Hill, 2007).
4.4.4 JastAdd
JastAdd is not a query language in itself, but a gen-
eral compiler construction tool with some very useful
features; aspect oriented programming and attribute
grammars. Using results from earlier work (Malec
et al., 2007) we can automatically create a parser for
an OWL ontology. Utilizing the aspect-oriented fea-
ture of JastAdd, we can then implement queries in the
form of aspect modules that will be weaved in with
the generated parser at compile time.
TOWARD ONTOLOGIES AND SERVICES FOR ASSISTING INDUSTRIAL ROBOT SETUP AND INSTRUCTION
267

While it does not possess the expressive power of
SWRL, it will enable the user to extract almost any
information from the ontology with just a few 10s of
lines of Java code.
4.4.5 Prolog
Prolog – or Datalog – is a last example of reasoning
tool that could be used to extract information from the
ontology. Some Prolog implementations have a RDF
interface like SWI Prolog that has been used with suc-
cess in semantic web applications (Wielemaker et al.,
2007). It is then possible to query an ontology from a
logic program and to run inference rules on the result.
As Prolog predicates and rules have much in com-
mon with SWRL, logic programs written in Prolog
and SWRL would be very similar and with equiva-
lent performances. Difference would come from the
location of the bridge between the ontology and the
inference engine, at the RDF level for Prolog, at the
OWL level for SWRL.
However, although Prolog is more expressive than
other languages and has a proven record of industrial
applications, Prot´eg´e does not support it. It is not
standardized within the context of the semantic web
either. This makes its choice, at the moment, riskier
than the other options.
4.5 From an Ontology to the Appconf
Sketch
The first step of the conversion pipeline generates
the XML Appconf sketch from the ontology. As the
SWRL formalism is more flexible and powerful, as
well as adopted by the semantic web community, we
are using it for this step in the demonstration proto-
type. As inference engine, we are using the built-in
bridge that is for now only coupled to Jess.
However, SWRL is a new feature of Prot´eg´e 3.4
and athough it already supports many abox and tbox
built-in predicates, it is still under active development.
Many of the predicates are not yet implemented. The
beta version status of SWRL pose timetable problems
and we are also using SPARQL to query the ontology
and write the rules.
We wrote rules using both formalisms to extract
information from the ontology. We show below an
example of SWRL rule that finds all the properties of
the subclasses of FinishedProduct and Figure 4 shows
a screenshot of the editing window in Prot´eg´e. We
also show its counterpart in SPARQL. We embedded
the rules in the Java prototype using the Prot´eg´e API
that resembles SQL drivers.
PREFIX list: <http://jena.hpl.hp.com/ARQ/list#>
Figure 4: A screenshot of the SWRL interface in Prot´eg´e
and an example of a rule.
SELECT ?product ?configuration
WHERE {
?product rdfs:subClassOf <#FinishedProduct> .
?property rdf:type owl:ObjectProperty .
{{?property rdfs:domain ?product} UNION
{?property rdfs:domain ?union .
?union owl:unionOf ?list .
?list list:member ?product}} .
?property rdfs:range ?configuration}
4.6 From the Appconf Sketch to Input
Modalities
The second step of the conversion pipeline generates
user input interfaces from the XML Appconf sketch.
As final products frequently need to be customized
according to the order, the manufacturing operator
will be able to enter a part of the specifications at
production time. In the demonstration prototype, we
will investigate three configuration modalities that are
core to the SMErobot project (SMErobot, 2007a),
namely E-forms, gestures, and spoken dialogue.
We are developing tools to generate automatically
the work piece production forms, the gesture tracking
and interpretation module, or the dialogue specifica-
tions from the XML Appconf. Before the piece is
manufactured, the operator fills in the remaining data
corresponding to the final piece using the modality
of her/his choice. To ease the interaction, we are in-
vestigating a framework to combine simultaneously
the different modalities so that the operator can use
speech and gestures at the same time for instance.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
268

Figure 5: Multimodal dialogue architecture.
4.6.1 Transformation Language
As transformation language to produce the forms and
the dialogue specifications, we are using XSLT. XSLT
enables to apply transformations to Appconf nodes
accessed via the XPath language. It can produce
XML documents in formats like XHTML for the
forms or VoiceXML for the dialogues. In addition, we
are investigating the XSL-FO page-formatting stan-
dard where the description of a document content uses
objects such as blocks, tables, footnotes, etc. It is
richer than HTML-like descriptions and can be con-
verted to PDF. The conversion of an XSL-FO doc-
ument to a PDF uses a sequence of transformations
that builds the XML tree, produces graphical objects,
renders the objects as text areas with their pixel posi-
tioning, and finally generates PDF.
4.6.2 VoiceXML
The demonstration prototype includes a voice modal-
ity that enables the operator to configure the prod-
uct through a dialogue and hence have his hands free
while s/he fills in the manufacturing options. The di-
alogue uses a system-initiative scheme, which means
that the dialogue structure resemble a form filling pro-
cedure where the user answers questions posed by the
system.
We have chosen the Voice Extensible Markup
Language, VoiceXML, to generate the dialogues.
(VoiceXML, 2007) is markup language that enables
a programmer to build form-based, goal-oriented dia-
logues (system-initiative mostly). The user fills fields
in forms using speech, where the field input can be
constrained with a grammar. It is designed to be in-
tegrated in a speech server and supports IP telephony.
As VoiceXML is a standard, the programs should be
portable to any platform that supports this language.
4.7 Perspectives: Multimodal
Management
We will examine possible designs for the multimodal
management architecture such as the one shown in
Figure 5. It is mainly derived from a previous work
of a member of the LTH team (Bersot et al., 1998;
God´ereaux et al., 1998) and a recent system devel-
oped by the Bell labs (Ammicht et al., 2007; Potami-
anos et al., 2007). One input channel corresponds to
the speech recognition module, which transcribes the
user’s speech into a word stream. The language en-
gine then processes the character flow dealing with
syntax, which is constrained by the VoiceXML struc-
ture, and semantics. The semantic module converts
words into a semantic representation that is common
to speech and other types of interaction. The other
channel corresponds to form filling, which are pro-
cessed by the multimodal manager. The pragmatic
module merges data from both modalities and keeps
track of the context and the application goals. The re-
sulting answers are either converted into speech to the
user by a speech synthesizer or presented visually by
a visualizing module.
The multimodal architecture will use a client-server
architecture and instantiate some of the modules
shown in Figure 5. We are currently defining them. In
the future, it could evolve into an integration platform
enabling partners to plug their applications. As a use
case we consider interactions where the user fills in
the data using one modality, the corresponding client
sends the data to the server, and the server updates the
context of all the modalities. There are then continu-
ous visual or audio updates of the current context. For
instance, an audio message is synthesized each time
the user has selected an option with the form, to con-
firm or remind the next actions. Modality switching
could be carried out manually by the user or automat-
ically.
TOWARD ONTOLOGIES AND SERVICES FOR ASSISTING INDUSTRIAL ROBOT SETUP AND INSTRUCTION
269

5 CONCLUSIONS
We have described the design and implemention of an
assistive infrastructure based on the use of an ontolog-
ical network to encapsulate knowledge on the product
data and manufacturing processes. We have imple-
mented a prototype ontology that serves as the main
data source to automatically generate digital forms
and voice dialogues to configure a wood nameplate
manufacturing process. As a perspective, we intend
to synchronize modalities for a more flexible, effi-
cient user input. A first prototype will be available
for demonstration in Spring 2008.
ACKNOWLEDGEMENTS
The work presented in this paper is being financed
mainly by the EU FP6 projects SMERobot and
SIARAS. Partner companies within SMErobot with
which we have close cooperation in this work include;
ABB AB, Rinas ApS, and Visual Components Oy.
The respective developer teams behind the soft-
ware tools we are using also deserve to be acknowl-
edged: Prot´eg´e, Jess, and JastAdd.
REFERENCES
Ammicht, E., Fosler-Lussier, E., and Potamianos, A.
(2007). Information seeking spoken dialogue systems
part I: Semantics and pragmatics. IEEE Transactions
on Multimedia, 9(3):532–549.
Antoniou, G. and van Harlmelen, F. (2004). A semantic web
primer. The MIT Press.
Bersot, O., Guedj, P.-O. E., God´ereaux, C., and Nugues,
P. (1998). A conversational agent to help navigation
and collaboration in virtual worlds. Virtual Reality,
3(1):71–82.
Buitelaar, P. (2007). On the role of natural language pro-
cessing in a data-driven approach to the ontology
life-cycle. Keynote talk at TALN, Toulouse, France
(http://olp.dfki.de/ontoselect/).
Friedman-Hill, E. (2007). Jess, the rule engine for the Java
platform. http://herzberg.ca.sandia.gov/, site accessed
December 2007.
God´ereaux, C., Guedj, P.-O. E., Revolta, F., and Nugues, P.
(1998). Virtual Worlds on the Internet, chapter Ulysse:
An interactive, spoken dialogue interface to navigate
in virtual worlds. Lexical, syntactic, and semantic is-
sues, pages 53–70, 308– 312. IEEE Computer Society
Press, Los Alamitos, California.
Haegele, M. (2007). White paper on trends and challenges
in industrial automation.
JastAdd (2007). The JastAdd Compiler-Compiler System.
http://jastadd.cs.lth.se, site accessed December 2007.
Malec, J., Nilsson, A., Nilsson, K., and Nowaczyk, S.
(2007). Knowledge-Based Reconfiguration of Au-
tomation Systems. In Proceedings of IEEE CASE,
pages 170–175. IEEE.
McGuinness, D. L. and van Harmelen, F. (2007). OWL
web ontology language. http://www.w3.org/TR/owl-
features/, site accessed December 2007.
Potamianos, A., Fosler-Lussier, E., Ammicht, E., and Per-
akakis, M. (2007). Information seeking spoken di-
alogue systems part II: Multimodal dialogue. IEEE
Transactions on Multimedia, 9(3):550–566.
Prot´eg´e (2007). The Prot´eg´e ontology editor and knowl-
edge acquisition system. http://protege.stanford.edu,
site accessed December 2007.
RDF (2007). Resource description framework.
http://www.w3.org/RDF/, site accessed Decem-
ber 2007.
RDFS (2007). RDF schemas. http://www.w3.org/TR/rdf-
schema/, site accessed December 2007.
SIARAS (2007). Skill-based inspection and assembly for
reconfigurable automation systems.
SMErobot (2007a). The European robot initiative for
strengthening the competitiveness of SMEs in man-
ufacturing.
SMErobot (2007b). Preliminary description of concepts for
high-level programming methods. Technical Report
Deliverable DR2.6. Deliv.
SPARQL (2007). SPARQL protocol and RDF query lan-
guage. http://www.w3.org/TR/rdf-sparql-query/, site
accessed December 2007.
SWRL (2007). SWRL: A semantic web
rule language combining owl and ruleml.
http://www.w3.org/Submission/SWRL/, site ac-
cessed December 2007.
VoiceXML (2007). Voice extensible
markup language (VoiceXML) 2.1.
http://www.w3.org/TR/voicexml21/, site accessed
December 2007.
Wielemaker, J., Hildebrand, M., and van Ossenbruggen,
J. (2007). Using Prolog as the fundament for ap-
plications on the semantic web. In Proceedings of
the ICLP’07 Workshop on Applications of Logic Pro-
gramming to the Web (ALPSWS-2007), Porto, Portu-
gal.
XSLT (2007). XSL transformations (XSLT) version 2.0.
http://www.w3.org/TR/xslt20/, site accessed Decem-
ber 2007.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
270
