
DETECTING TRANSIENT WEATHER PHENOMENA ON MARS
An Overview of the Design and Calibration of Multiparametric Detection
Algorithms for the REMS/MSL Mission
J. Verdasca, J.-A. Manfredi and V. Peinado
Centro de Astrobiologia, Instituto Nacional de Técnica Aeroespacial
Ctra. de Torrejón a Ajalvir Km 4, Torrejón de Ardoz, Madrid, Spain
Keywords: Multiple-scale phenomena, change detection, autonomous decision, multiparametric algorithms.
Abstract: In its baseline operation mode, the REMS/MSL mission is not well suited to characterize transient weather
phenomena evolving on multiple scales. In this paper we argue that this limitation can be overcome by
enabling REMS to autonomously detect sudden and unexpected changes in the acquired data and
subsequently extend the time allocated for measurements. Detection is accomplished by means of
multiparametric Event-Finding Algorithms running on the REMS micro-controller. We describe the
principles underlying the design of such algorithms and the methods for their calibration.
1 DESCRIPTION OF REMS
The Rover Environmental Monitoring Station
(REMS) is an instrument suite to be carried aboard
the Mars Science Laboratory (MSL) rover. It is
being developed and integrated at the Centro de
Astrobiologia (CAB
/(CSIC-INTA)) as a contribution
of the Spanish Government. REMS comprises two
booms attached to the rover mast at an angle of 120
degrees (Figure 1).
Figure 1: REMS booms with sensors.
Each of the booms carries a wind sensor and an air
temperature sensor. An infrared sensor mounted on
the electronics casing of boom 1, facing the ground,
will measure the brightness temperature of the
martian surface. On boom 2 there is a humidity
sensor (the protruding cylindrical structure on the
figure) provided by the Finnish Meteorological
Institute (FMI). A pressure sensor, (not shown here)
also built by the FMI, is mounted below the rover
deck, being in contact with the atmosphere through a
small opening. Finally, an UV sensor (also not
shown), located on top of the rover deck, will
measure the irradiation intensity in six different
bands. REMS features a small embedded computer
system whose main task is to act as an Interface
Control Unit but is also capable of executing simple
programs.
2 THE REMS/MSL MISSION
2.1 Science Goals
The MSL mission will assess the present and past
habitability of Mars. REMS will contribute by
monitoring the physical processes taking place in the
layer of the atmosphere closest to the surface.
Scientist believe that if life exists on Mars it will
most likely be found in tiny pockets of liquid water
in porous rock beneath the surface. Local weather
patterns likely play a fundamental role in the ability
of sheltered environments to retain liquid subsurface
311
Verdasca J., -A. Manfredi J. and Peinado V. (2008).
DETECTING TRANSIENT WEATHER PHENOMENA ON MARS - An Overview of the Design and Calibration of Multiparametric Detection Algorithms
for the REMS/MSL Mission.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 311-316
DOI: 10.5220/0001506703110316
Copyright
c
SciTePress

water. For instance, the regime of local winds may
impact the cycles of freezing and thawing of
permafrost soils inside craters and on the slopes of
mountains, cliffs or hills. Indeed, recent images
obtained from orbit show gullies and trenches that
seem to have been made by water outpouring at
certain localized spots and flowing down the slopes.
An alternative explanation, which rules out liquid
water, sustains that the gully-like features are caused
by small landslides triggered by wind. Hence, one of
the main goals of REMS is to shed light on the
regime of local winds to enhance our ability to
distinguish between features most likely due to
aeolian erosion from those which could possibly
have been carved by liquid water.
2.2 Limitations of REMS Baseline
The baseline currently being considered for REMS
Nominal Mode (NM) operation consists in 24
sessions per sol of 5 minutes each, comprising a data
acquisition cycle at a sampling rate of 1 Hz. Thus,
REMS ability to characterize short range multiple-
scale events is limited. In this position paper we
argue that this limitation can be overcome by
providing REMS with the capability to carry out
Opportunistic Science. We outline the strategy we
are pursuing to this aim, and lay down its scientific
basis. We show how, based on a sequence of
uploaded programs, the REMS computer can
autonomously decide to switch from NM to the so-
called Event Mode (EM) in case an anomalous
pattern is detected. When functioning in EM the
passage into Sleeping Mode is rescheduled to occur
after a configurable amount of time, during which
REMS will collect data at the nominal sampling rate.
3 OPPORTUNISTIC SCIENCE
ONBOARD MARS ROVERS
3.1 MER/OASIS vs. MSL/REMS
Opportunistic science onboard the Mars Exploration
Rover (MER) mission (Spirit and Opportunity) is
being implemented at NASA's Jet Propulsion
Laboratory (JPL) through a project known as the
Onboard Autonomous Science Investigation System,
(OASIS). This system identifies opportunistic
targets (mainly rock samples), collects data on those
targets, then analyzes them onboard to identify those
which merit further investigation. It also executes
onboard planning and scheduling software that can
dynamically modify the projected rover traverse
plan in order to accommodate the new science tasks.
Finally, the onboard computer evaluates if sufficient
resources are available to meet the additional science
requests (Castaño,
2007). Unlike OASIS, the REMS
Opportunistic Science computer programs assume a
purely passive role in planning and scheduling tasks.
The REMS computer executes a sequence of
instrument commands that the MSL main computer
has uploaded into its flash memory. These are
actions that REMS must execute at pre-scheduled
times without further intervention by the rover
computer – acquisition cycles, parameter
configuration, housekeeping, etc. The EFA's are part
of the set of programs uploaded into the REMS
memory and executed once every session. Their
only effect on the sequence of operations is to
(eventually) extend the period of data acquisition,
considering its previously allocated resources. This
framework is designed not to interfere with pre-
scheduled regular activities. The approach inevitably
limits the scope of REMS Opportunistic Science
activities but, on the other hand, improves its degree
of autonomy and risk avoidance level.
3.2 Targets for REMS Opportunistic
Science
The fast evolving phenomena that we wish to
sample normally involve multiple timescales which
cannot be fully accommodated within normal
session periodicity and/or duration. These are the
natural targets for Opportunistic Science actions.
They can be effectively classified into i) boundary
layer oscillations (BLO's), ii) dust devils and
plumes, iii) microfronts, iv) local dust storms, v)
orographic winds and vi) mountain waves. An
algorithm to detect BLO's must be capable of
recognizing fluctuations with timescales ranging
from a few minutes to about one hour. Dust devils
are much shorter events, generally not exceeding a
few minutes. They consist on rotating columns of
warm air made visible as sand and dust is sucked
into the central core. Usually, convective plumes are
even more ephemeral than dust-devils. Plumes are
characterized by straight-line winds converging to a
hot spot where the warmer air starts to rise. They do
not display the rotation of the horizontal wind
component that characterizes dust devils; rather, a
pronounced increase in the vertical wind component
is observed. Microfronts share the structure of their
synoptic counterparts but arise on a local scale
instead, taking a couple to a few hours to pass over a
given point. The evolution of global and regional
dust storms can be tracked from measurements in
REMS nominal mode. However, data will be way
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
312

too sparse to provide an accurate description of
short-scale, local events. The low atmospheric
density of the martian atmosphere and the intense
radiative processes drive robust orographic flows.
Furthermore, the patterns of large-scale circulation
are reinforced by the extreme regional asymmetries
of the Mars elevation field. Sometimes these
orographic flows appear associated with periodic
buoyancy perturbations which develop when stable
stratified air ascends a barrier – mountain waves.
Like on Earth, these waves occur on the scale of
individual mountains or chains with oscillation
periods ranging from a few minutes to one sol.
4 CHANGE DETECTION
ALGORITHM
4.1 Principles of EFA Design
Due to their multiple timescales, the above
phenomena would be missed or insufficiently
sampled should the unit operate always in NM. In
the case of phenomena lasting a few dozen minutes
to a few hours the measurements at high sampling
rate in sequences of short acquisition cycles will
mostly produce redundant data whereas the session
periodicity is much too low to permit a smooth
characterization. For the most brief phenomena,
such as plumes and dust devils, the session duration
would, in principle, be enough to fully capture the
evolution of one or more of these events, and the
sampling frequency adequate. However, because the
unit will be sleeping for more than 90 % of the time
the probability that such an event will fall within the
5 minute allocated slot is small; in most occasions
REMS will miss the phenomenon entirely. Indeed,
the experience of past missions, particularly
Pathfinder, suggests that relying on serendipitous
observations is a very poor strategy to detect dust
devils. Dedicated campaigns to search for occasional
phenomena are envisaged as part of an alternative
'human in the loop' strategy. Nevertheless, because
these are, in general, rare events with uncertain
periodicity they are difficult to target by
measurements to be carried out at pre-selected, fixed
times. One may, if the allocated measurement
window is too narrow, miss the phenomena
altogether. Alternatively, if it is too wide, valuable
resources will be wasted. Performing decision-
making onboard the rover allows for science goals to
be realized under circumstances where a control
loop from the ground is not possible because there is
not enough time for scientists to react to changes in
data patterns (by organizing dedicated campaigns,
for instance). However, the present framework is not
designed to replace entirely human decision making
but rather to optimize the combined action of human
experts and the REMS embedded system. REMS
planning and scheduling activities are performed on
the ground, by means of the Ground Data System
(GDS). The GDS provides all the computational
tools required to accomplish these tasks as well as
instrument health monitoring and data analysis. An
Opportunistic Science Software (OSS) package is
integrated in the GDS. Every day, the downloaded
REMS data product is processed at the GDS and the
part specific to the self-triggering procedure is fed
into the OSS. The complete statistics of event
detection is recorded for housekeeping, diagnosis
and debugging purposes. On a regular basis, analysis
of the results will permit fine tuning and in-flight
calibration of the EFA's. This procedure will be
supervised jointly by scientists and software
engineers present at the GDS. The standard
operation procedures involve generating activity
plans for a few sols determining, whenever possible,
if local meteorological events of interest are likely to
occur in that period. Having negotiated with the
MSL project management the resources for the
period being considered, the extra measurement time
available is distributed though a number of possible
EM windows. These and other relevant parameters
are updated at the next Schedule Table Script
(ST_Script) uplink. The REMS computer system is
then left to decide autonomously whether or not to
switch into EM according to the disposition of
allocated windows and the output of the EFA's.
4.2 Design Flexibility
The above framework requires an onboard software
design capable of offering full flexibility as the
process of calibration of the EFA's will continue on
Earth during the MSL cruise phase. Design
flexibility is also important so that diagnosis, fine-
tunning and debugging of the EFA's are possible
after operations begin on martian surface, with
minimal resort to software patching. It is also
expected to reduce substantially the risks to baseline
operation associated with the relative increase in
software complexity which the Opportunistic
Science capability inevitably carries. The current
design rationale is as follows: at the end of a
measuring session the REMS micro-controller will
run a prescribed sequence of EFA's. The order in
which the EFA's on the list are executed can be
modified at every ST_Script update. The first step in
DETECTING TRANSIENT WEATHER PHENOMENA ON MARS - An Overview of the Design and Calibration of
Multiparametric Detection Algorithms for the REMS/MSL Mission
313

any EFA is to process sensor raw data by applying
estimators to compute observables. The latter
emulate as close as possible the behavior of the
actual physical parameters (e.g. temperature,
pressure, wind magnitudes and direction, etc.).
Estimators are thus simple procedures that involve
functions and coefficients determined during the
sensor's calibration. The reliability of observables as
proxy values is assessed through comparison with
the output of the GDS post-processing software that
retrieves the 'true' physical parameters from raw
data. Each EFA is divided in two parts running
sequentially: detection and validation. Only
validated detections will cause REMS to self-trigger
into EM. The detection part of the EFA reads the
relevant observables and, through a sequence of
logical operations decides whether or not a detection
has taken place. Then it assigns an initial confidence
level to that detection, called the Baseline
Confidence Level (BCL) to be compared with the
uploaded Threshold Confidence Level (TCL); if
BCL > TCL, the detection is validated: the EFA will
immediately stop running, all subsequent EFA's on
the list will be overruled and the unit will shift into
EM at once. If at least one detection has occurred
but nevertheless had been assigned a BCL value
below threshold, then the EFA will compute a
number of flags and/or consult a table of previously
set flags. The final result of these computations is an
integer value, called the Increase in Confidence
Level (ICL), incremental to the BCL. Both intervene
to calculate the final Detection Confidence Level
(DCL). If DCL > TCL, then EM is triggered. Flags
are encoded signals either internally generated by
the EFA acting on observables or historic records, or
engendered at the GDS. In the later case, the flags
are generated by the OSS package and uploaded as
parameters in the ST_Script. Flags have limited
resolution (small integers and binary numbers) and
intervene only at the validation stage. For instance,
the orography flag may take up to 16 integer values
representing a type of orographic feature – crater
rim, mountain ridge, rock, etc. – a scale of elevation
with respect to rover position and the feature's size.
Internal generation of flags, within the EFA, will
sometimes involve elementary statistical analysis
while in other cases it implicates logical operations
and/or Lookup Table (LUT) consultation. For
instance, in the EFA for microfronts described in the
next section, the PLO flag – for 'Pressure Low' –
indicates, based on the history of measurements
performed in past sessions, whether a sustained
pressure decrease in the hours preceding the passage
of a cold front has occurred. When no detection has
taken place, or achieved the TCL required for
validation, the system proceeds to execute the next
EFA on the list. If, once all the EFA's on the list
have been executed, no detection occurred or was
validated, the unit will continue its scheduled
operations normally, going into sleeping mode at the
pre-scheduled time. REMS will keep in memory the
session averages of the observables as well as a
history of the parameters involved in the EFA's,
such as confidence levels, flags, etc. Normally, data
for a complete sol should be kept but this may vary
depending on total memory load.
4.3 Two-tier Example Algorithm
We provide an example of EFA structure in Figure 2
using a simplified flow-chart. The example EFA
considered here targets microfronts. It is a Multiple-
Session Detection Algorithm (MSDA), i.e entails
accessing data from more than one session. Note
also that it requires detrending, i.e the deviations
with respect to the foreseeable trend have to be
calculated in the beginning of the algorithm. A first
level detection, L1, results from a qualitative
divergence with respect to the trend, when
temperature rises in late afternoon or drops before its
normal apex, for instance. The persistence of this
inversion for a number of consecutive sessions is
interpreted as a sign of confidence build up, and thus
the Baseline Confidence Level (BCL) is set
accordingly. A second detection level, L2, is based
on quantitative divergence only. Even in the case
when the sign of temperature variation is the one
expected, there still may be a discrepancy in its
quantitative rate-of-change (ROC). For instance, the
ROC value may exceed some threshold d above the
expected temperature progression. As this condition
is obviously weaker than trend inversion it shall be
assigned a lower BCL. If the relevant BCL is lower
than the threshold, then the EFA will proceed to the
compute flags – in this case the PLO flag mentioned
above and also two other flags signaling,
respectively, an increase in wind magnitude (WIM)
and the persistence in direction (DIR) of the wind
vector. Depending on their values, the DCL's may or
may not be increased, as previously described.
5 FUNCTIONALITY TESTS AND
CALIBRATION
5.1 Overview of the Procedure
Functionality tests and calibration of the EFA's will
be carried out on a desktop computer emulation
using selected signatures of the events as input.
These test signatures can be created from: i) real
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
314
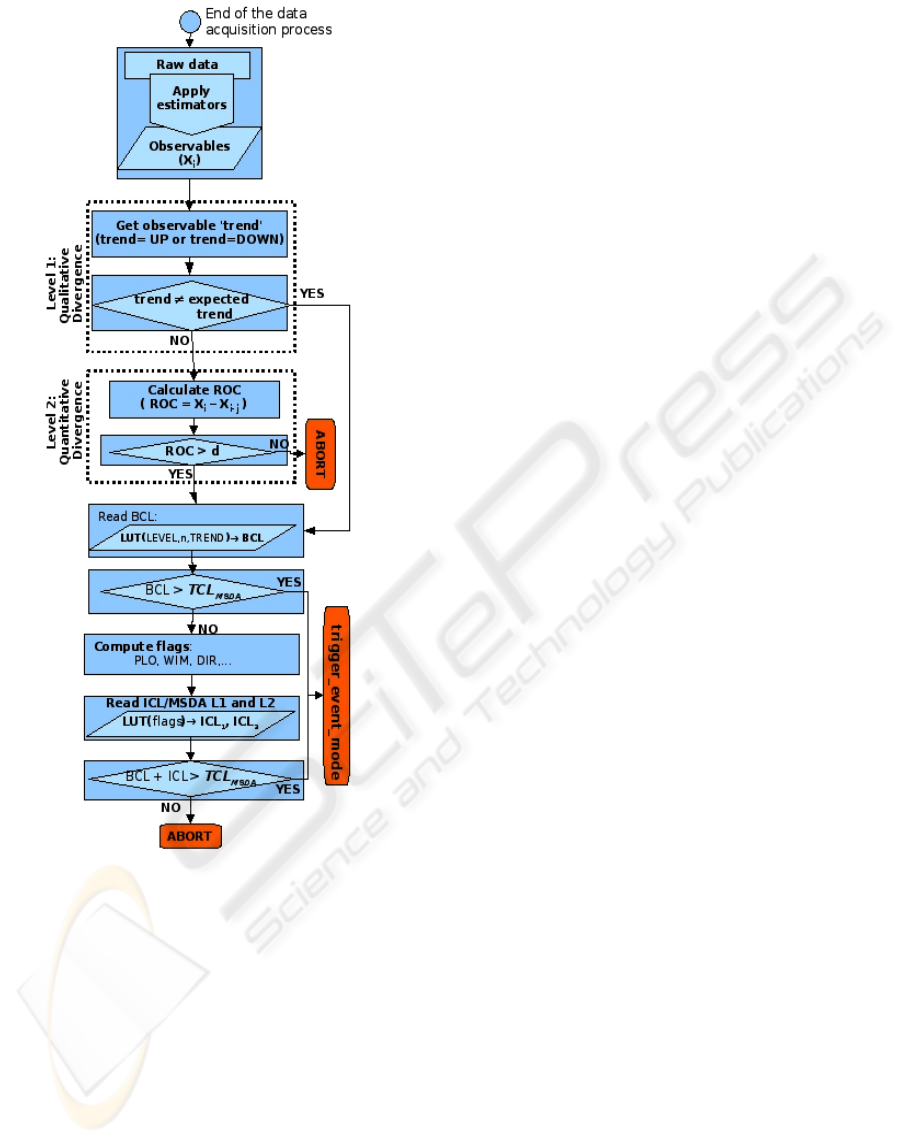
Figure 2: An example EFA flow-chart.
Martian weather data ii) output of mesoscale models
ii) meteorological data from martian environmental
analogues iii) engineered representative datasets and
iv) field tests. Upon application of the fine-tunning
procedure the percentage of false positives and false
negatives is evaluated and once their numbers lie
within acceptable levels the EFA is considered
calibrated.
5.2 Martian Weather Data
Up until now only the Viking and Pathfinder
missions have carried out successful meteorological
experiments on the surface of Mars. The Phoenix
lander - currently in its cruise phase and due to land
on May 25, 2008 – carries temperature and pressure
sensors together with wind speed and direction
indicators. Currently we are working with data from
Viking and Pathfinder and, if Phoenix is successful,
we shall use its data as well. Each of those datasets
has its merits and faults: the Viking data have poor
resolution but is extensive; Pathfinder data cover a
much shorter period but display higher resolution. In
the later case, in addition to signatures of dust devils
registered by the sensors, there are, in some cases,
simultaneous confirmation from images. We shall
apply the EFA's to selected parts of the time series
chosen because they reveal the characteristics of a
given event, with particular focus on the patterns
already presented in the scientific literature as
symptomatic of the phenomena under scrutiny. After
a number of refinement stages we expect to reach
the minimal algorithmic complexity required to
detect the relevant features.
5.3 Martian Environmental Analogues
and Field Tests
Because weather data from Mars is scarce we will
have to use data from martian environmental
analogues and field tests on Earth. Overall, the best
candidates for the role of environmental analogues
are the dry valleys of Antarctica, because of the
extremely cold and dry air and the fact that a fairly
predictable regime of robust slope winds exists.
When searching for dust devils and plumes the best
places to look for on Earth are deserts. These
phenomena have been extensively studied in the
Arizona desert (Renno, 2004). It is an unfortunate
yet unavoidable fact that the optimal locations to
conduct field tests are harsh environments in remote
areas of difficult (and thus expensive) access. This
fact poses a constrain in our current development of
a priority list for site selection for field tests. The
sites being evaluated include Deception Island –
home to a Spanish Antarctic base, where members of
the REMS team regularly conduct research – as well
as sites in the Atlas mountains and the Atacama
desert. Nevertheless, locations in close reach of the
CAB facilities will be favored, at least in the
preparatory phases of the field test campaign. In this
vein, we are currently assessing the reliability of
certain arid and semi-arid regions in the Iberian
peninsula as partial analogues. A first set of tests
will be conducted with a commercial weather
station. In a later stage, we shall use a REMS
model, complete with rover mast and deck dummies,
to carry out end-to-end performance and reliability
tests of the EFA's under the geometrical constraints
imposed by integration with the rover.
DETECTING TRANSIENT WEATHER PHENOMENA ON MARS - An Overview of the Design and Calibration of
Multiparametric Detection Algorithms for the REMS/MSL Mission
315

5.4 Engineered Artificial Datasets
In order to overcome the difficulties of using
terrestrial data in calibration, due to dissimilarities
between the atmospheres of the two planets, we shall
work also with engineered data. Based on the
analysis of field data and sensor calibration data
obtained under martian conditions, we shall create
artificial datasets to mimic the signatures expected
from the phenomena. Integrating sensor calibration
data with theoretical models and/or computer
simulations, notably mesoscale models of the
atmosphere, we can also create prototype signatures
that minimize the constraints set by wind tunnels
and martian atmosphere simulation chambers.
6 ANTICIPATION
We have outlined a strategy to enable autonomous
decision-making aboard a mobile robotic surface
probe, in order to optimize its science return.
Provided with this capability, REMS will be able to
detect sudden and unexpected changes in
environmental parameters adjusting its operation
mode in response, without the need for a control
loop from Earth. As planetary exploration stretches
out further away from the Earth, communication
delays and interruptions will make remote control
increasingly harder. Though in the case of flyby and
orbital missions these delays can be accommodated
without much hindrance the situation is very
different for robotic probes evolving in a changing
environment. For a vehicle exploring Titan's surface
or Europa's putative ocean, onboard intelligent
systems will be essential for virtually all craft
operations including guidance and steering, obstacle
avoidance, selection of scientific targets, data
downlink management, etc. Sending probes to land
on these far away bodies is not envisaged in the near
future. Until then, the surface of Mars will the
cutting-edge operation scenario and the most
demanding testing ground for the implementation of
autonomous decision-making in the context of
planetary exploration by robots. Inspired by the
OASIS concept (http://ml.jpl.nasa.gov/oasis/), we
decided to use REMS for an experimentation in
Opportunistic Science. However, because the
processing power of the REMS computer system is
low, (even when compared to common household
appliances), we are forced to use exceedingly simple
programs whose ability to identify changes in
environmental conditions cannot be guaranteed a
priori. But even if some of the concepts being
developed do no mature fast enough to be
implemented in REMS/MSL, they still may find
application in future missions, to Mars and beyond.
Because operational autonomy is intrinsic to the
REMS design, the software under development
needs not to be integrated with the spacecraft's flight
software, and thus the employment of an upgraded
version in future missions should be straightforward.
This tempts us to anticipate a bold strategy. Indeed,
one can envisage a scenario in which future landers
and rovers being sent to Mars would each carry a
station similar to REMS, provided with autonomous
decision-making abilities. Thus, even after every
other component of the mission has reached its end-
of-life the spacecraft would not turn into waste but
instead become a node in an ad-hoc network of
weather stations. Of course, each future autonomous
station would need dedicated power and data
downlink systems; and would have to operate at a
low sampling rate and use recurrent transfer
windows in order to lower its power consumption
and step-up the probability that the data streams be
received unbroken by a (future) small network of
low-orbit communication relay satellites. This
network could be considered either as a precursor
mission or a scalable inexpensive alternative to the
MetNet mission (
http://www.ava.fmi.fi/metnet-portal/),
currently being proposed, and also NetLander
(
http://smsc.cnes.fr/NETLANDER/), abandoned in 2003.
REFERENCES
R. Castaño et al., Journal of Field Robotics, 24 (5), 379-
397, 2007.
N. Renno et al, Journal of Geophysical Research, 109,
E07001, 2004.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
316
