
DYNAMIC SLA NEGOTIATION BASED ON WS-AGREEMENT
Antoine Pichot
Alcatel-Lucent, Route De Villejust, 91620 Nozay, France
Oliver W¨aldrich, Wolfgang Ziegler
Fraunhofer Institute SCAI, Department of Bioinformatics, 53754 Sankt Augustin, Germany
Philipp Wieder
IT and Media Center, University of Dortmund, 44221 Dortmund, Germany
Keywords:
Dynamic Service Level Agreement, Negotiation, Web Services Agreement, Commit Protocol.
Abstract:
In Grid, e-Science and e-Business environments Service Level Agreements (SLAs) are often used to establish
frameworks for the delivery of services between service providers and the home organisations of the cus-
tomers. While this high level SLAs, e.g. framework contracts, govern the relationship between the parties,
it is desirable for the end-user to have dedicated quality of service (QoS) also for individual services like
the orchestration of resources necessary for composed services. Grid level scheduling services typically are
responsible for the orchestration and coordination of resources in the Grid, which requires the Grid level sched-
uler to coordinate resource management systems probably located in different domains. As the site autonomy
has to be respected negotiating with the individual sites is the only way to achieve the intended coordination.
Electronic SLAs emerged as a new way to negotiate and manage usage of resources in the Grid and are al-
ready adopted by a number of management systems. Therefore, it is natural to look for ways to adopt SLAs
for Grid level scheduling. To realise this approach we need efficient and flexible protocols supporting dynamic
negotiation and creation of SLAs. In this paper we propose and discuss ongoing work on extensions to the
WS-Agreement protocol addressing these issues.
1 INTRODUCTION
A Service Level Agreement (SLA) is a contract be-
tween a service provider and its customer that de-
scribes the service, terms, guarantees, responsibilities
and service-level to be provided. In Grids, e-Science
and e-Business environments, SLAs are often used to
establish service-delivery frameworks between a ser-
vice provider and a service consumer domain. Such
”high-level” SLAs usually define the framework of
service provisioning and overall Quality of Service
(QoS). However, it is desirable and sometimes even
essential for the end-user to have dedicated QoS also
for individualservices, e.g. in a case of a high-priority
service request.
In this article we focus on electronic SLAs dynam-
ically negotiated and created by software programs on
behalf of end-users. The use case we consider is re-
source provisioning, i.e. an SLA-based service provi-
sion implies access to various kinds of resources, like
computing nodes, network connections, storage areas
or any combination of these.
Resource consumption varies over time and is
sometimes dependent on the successful completion
of previous tasks. An orchestrator communicates
on behalf of customers end-users with several
local resource managers to negotiate and create
dynamic SLAs. In the rest of the document,
for reasons of clarity, we will limit the problem
scope to use-cases where computing and network
resources are needed, and to a Grid scheduler
as orchestrator that has to negotiate, select and
schedule resources in order to execute a user’s
job and fulfil its requirements. As we will see,
co-ordinating the access to multiple resources at
the same time requires specific protocol features
that negotiation and agreement protocols do not
necessarily have. Fig. 1 describes the different steps
to be performed by a Grid scheduler to co-allocate
38
Pichot A., Wäldrich O., Ziegler W. and Wieder P. (2008).
DYNAMIC SLA NEGOTIATION BASED ON WS-AGREEMENT.
In Proceedings of the Fourth International Conference on Web Information Systems and Technologies, pages 38-45
DOI: 10.5220/0001525500380045
Copyright
c
SciTePress

resources: resource filtering, SLA negotiation, SLA
creation, and job submission. This article presents
ongoing work in the Grid Resource Allocation
Agreement Protocol working group (GRAAP-WG,
<https://forge.gridforum.org/projects/graap-wg/>)
of the Open Grid Forum. The group is now working
on protocol extensions for the WS-Agreement (An-
drieux et al., 2007) specification supporting the SLA
negotiation and creation phases.
Figure 1: Resource selection & reservation.
In the following section we introduce work related
to negotiation of SLAs. Section 3 describes SLA
negotiation and creation problems, how distributed
databases’ commit protocol shed light to this prob-
lem. Section 4 describes how these problems can be
solved using the Web Services Agreement protocol
and Section 5 concludes the paper.
2 RELATED WORK
While WS-Agreement, since May 2007 the proposed
recommendation of the Open Grid Forum for a lan-
guage and a protocol to create SLAs, was becom-
ing stable over the last two years, the interest in
using SLAs for resource negotiation was growing
constantly. One indicator is the number of projects
and developments around resource management and
scheduling considering or already using SLAs. In the
following we briefly discuss the different approaches.
Some of the projects, e.g. CATNETS (Joita
and Rana, 2006), openCCS (Keller, 2007),
AgentScape (Mobach et al., 2006), the
Community Scheduler Framework (CSF,
<http://sourceforge.net/projects/gcsf/>), and the
VIOLA MetaScheduling Service (MSS) (Wieder
et al., 2005), are using WS-Agreement to create
the SLAs. Some plan to use WS-Agreement,
e.g. the Grid Resource Management System
(GRMS, <http://www.gridge.org>) and GridWay
(<http://www.gridway.org/>) are in the planning
phase for integrating WS-Agreement. Finally, some
have not yet decided which technology to use or
are not using a web services stack at all: eNanos
(<http://www.bsc.es/grid/enanos/>), Grid super-
scalar (Badia et al., 2006) and the Highly-Available
Resource Co-allocator (HARC) (MacLaren, 2007).
CATNETS uses a market oriented mechanism of
offers and bids to determine the price of a resource
and to create an SLA based on the result, thus no
negotiation is used. openCCS, AgentScape and MSS
are Grid schedulers and use negotiation to refine
offers and requests in order to create SLAs. In
case of MSS, this includes negotiation with several
resource providers to co-allocate multiple resources
or support workflow execution across multiple
resources. As WS-Agreement does not include a
protocol for negotiating the terms of an SLA, the
three approaches currently use proprietary extensions
of WS-Agreement for the negotiation. GRMS and
GridWay currently do plan not use WS-Agreement
for SLAs between provider and customer, but plan to
use WS-Agreement for the communication between
multiple co-operating Grid schedulers. This will
allow to negotiate usage of resources that are not
part of the environment of the the initially accessed
Grid scheduler. Scenarios and the corresponding re-
quirements for the protocol are developed in the Grid
Scheduling Architecture research group (GSA-RG,
<https://forge.gridforum.org/projects/gsa-wg/>) of
the Open Grid Forum. The developers of the eNanos
Grid resource broker and the Grid superscalar pro-
gramming environment are currently evaluating the
technology for the integration of SLAs into their
tools. In contrast, the HARC developers decided not
to use a web services stack and do the negotiation
based on plain XML-messages over HTTPS.
Moreover,the GRAAP Working Group has started
work on extending WS-Agreement to support nego-
tiation of agreements for use cases where the sim-
ple step creation are not sufficient. In this paper
we discuss some general problems of negotiation in
distributed environments and present first ideas how
negotiation could be implemented on top of WS-
Agreement.
3 NEGOTIATION, CREATION
AND COMMIT PROTOCOLS
In this section negotiation is briefly discussed fol-
lowed by a presentation of commit protocols in dis-
tributed databases in Section 3.1 and commit proto-
cols for distributed resource management systems in
Section 3.2.
To run a job that requires several resources, like
networking and computational resources, managed by
DYNAMIC SLA NEGOTIATION BASED ON WS-AGREEMENT
39

different resource management systems (RMS), sev-
eral steps must be performed by a Grid scheduler.
Upon receipt of the job request, the scheduler starts
the first phase: resource filtering based on static in-
formation and dynamic information. Static informa-
tion does not change over time: number of CPUs, op-
erating system, location, etc. Dynamic information
changes over time: availability, load, etc. The second
phase is the negotiation process and results in the se-
lection of resources that can satisfy the job request.
The third phase is the SLA creation phase concluded
by the commitment of all service providers (or local
RMS) involved leading to a an reservation of the ne-
gotiated resources as described in the SLA. The last
phase is the job submission followed by the execution.
Negotiation is a widely studied topic and there are
numerous publications addressing different aspects,
e.g. (Shakun, 2002) is a general purpose negotiation
journal, (Briquet and de Marneffe, 2006) is a survey
about negotiation in distributed resource management
systems, while (Kuo et al., 2006b) and (Kuo et al.,
2006a) discuss aspects of service negotiation in the
Grid. In our context and in the simplest case, a user’s
job has to be executed and the Grid scheduler has to
select between different target systems. If all systems
are identical and only one parameter influences the se-
lection, i.e. price, this case is similar to a typical busi-
ness negotiation between one buyer and several sell-
ers. An auctioning mechanism like the ones described
in (Buyya, 2002) can be used. Of course, we take
the point of view of an end user, if we look at things
from a resource provider’s point of view, we have sev-
eral jobs that compete for one resource, i.e. several
buyers and one seller. If we look at the scheduler’s
point of view, we have many jobs that compete for
several resources, i.e. many buyers and many sellers.
Buyya (Buyya, 2002) (page 36) also surveyed sev-
eral distributed resource management systems based
on price.
Automatic negotiation of SLAs is a complex and
time consuming process (Jennings et al., 2001; Shen
et al., 2002; Green, 2004), when even two users have
to find an agreement on multiple criteria. Imagine
how difficult the problem becomes when multiple en-
tities have to reach an agreement (Czajkowski et al.,
2002). When at least two resources are needed at the
same time to run a job, e.g. a network connection
and a processing resource, several steps have to be
performed before reaching an agreement between the
resource providers and the consumer. Green (Green,
2004) cites mainly two frameworks for automatic ne-
gotiation: ontologies and web services. According to
him automated negotiation has three main consider-
ations: The negotiation protocol, the negotiation ob-
jects and the decision-making models. He considers
two options existing in order to achieve this type of
negotiation. One option is for the originating agent to
negotiate separately with each Autonomous System
(AS) along each potential path to ensure that an end-
to-end path is available. The dominant choice how-
ever, is to use a cascaded approach where each AS
is responsible for the entire path downstream of it-
self. This approach enhances agent autonomy as it is
only responsible for its immediate links. The auton-
omy of the cascaded approach struggles however with
the issue of price. In a cascading scenario an intelli-
gent agent would need to know the utility functions of
all the downstream domains if the best price combi-
nation is to be determined, which is private informa-
tion. In contrast, in this paper we limited the scope
to protocols that permit the negotiation of agreements
between two parties based on WS-Agreement rather
than tackling the full complexity of automated negoti-
ation. These bilateral agreements might then be com-
bined into one single agreement.
3.1 Commit Protocols for Distributed
Databases
Distributed transactional systems have been widely
studied. One of their objectives is to propagate a con-
sistent state across several systems, in a way that at
any time all systems can show a consistent state to
users. The consistent state or consistent view main-
tains and propagates between systems a logical co-
herent state. To provide crash recovery, several oper-
ations are logically grouped into transactions. Those
transactions permit the change from one consistent
view to another. For instance, you do not credit a
bank account if you have not debited another bank
account. However, these are two independent oper-
ations. A bank’s distributed database system must
group these two operations in one transaction. Thus it
permits the change from one consistent state “before
the transfer” to another “after the transfer”. Database
state changes are visible by other users once a trans-
action is committed to the system. In distributed
systems, each transaction can impact several differ-
ent systems not co-located. Thus distributed database
experts have developed commit protocols (Bhargava,
1987; Kohler, 1981; Oszu and Valduriez, 1991). As
Skeen described in (Skeen, 1981), “The processing of
a single transaction is viewed as follows. At some
time during its execution, a commit point is reached
where the site decides to commit or to abort the trans-
action. A commit is an unconditional guarantee to ex-
ecute the transaction to completion, even in the event
of multiple failures. Similarly, an abort is an uncondi-
WEBIST 2008 - International Conference on Web Information Systems and Technologies
40

tional guarantee to “back out” the transaction so that
none of its results persist. If a failure occurs before
the commit point is reached, then immediately upon
recovering the site will abort the transaction. Commit
and abort are irreversible.”
When a user needs to make a change in a dis-
tributed database, a co-ordinator will propagate this
change on all systems. As Skeen explains, upon re-
ceipt of a change request the co-ordinator forwards it
to all distributed systems. Upon the change request
receipt, all slaves go to the wait state. Then they
can decide whether or not to accept this change, and
send their response. The co-ordinator collects all re-
sponses to the change request, if one of them is neg-
ative, it goes in the abort state and sends an “abort”
to all systems, if all responses are positive, then the
co-ordinator goes in the commit state, and sends a
“Commit” to all systems. Upon receiving a “Com-
mit” (respectively “Abort”) all systems must commit
(respectively“Abort”) the change request. Fig. 2 (left)
represents a slave’s two phase commit protocol finite
state machine (FSM). This process is the two phase
commit process, supported by a two phase commit
protocol.
The problem of this process is that in case of sys-
tem failure. It’s impossible to know whether the trans-
action was committed or aborted. The wait state leads
to both commit and abort state. For instance, when
the co-ordinator fails after having sent a “commit”
to some slaves but not all, the remaining slaves are
blocked since they cannot know whether the transac-
tion should be aborted or cancelled.
To provide crash recovery, and avoid blocking
problems, Skeen introduced a three phase commit
protocol. He added an intermediary state before the
commitment as shown in Fig. 2 (middle). This state
corresponds to a prepare to commit. It’s impossible to
jump from this state to an abort state. He proved that
if a state transition was possible between the prepare
and the abort state, the protocol would be blocking.
As a consequence, from any state on the slave’s finite
state machine it is possible to determine whether the
transaction should be committed or aborted in case of
failure. In case of failure a slave in the “Wait” state
must abort, while a slave in the “Prepare” state must
commit.
3.2 Commit Protocols for Distributed
Resource Management Systems
In an environment with distributed RMS providing
guarantees on resource usage, a Grid scheduler may
create SLAs with its users. In a co-allocation use
case, this SLA takes into account several resources
Figure 2: Two phase commit slave’s FSM (left), three phase
commit slave’s FSM (middle), and SLA negotiation and
creation resource provider’s FSM (right).
coming from several resource providers. With each
independent resource provider a bilateral SLA has
to be negotiated and created. A Grid scheduler has
to create these bilateral SLAs on behalf of its users.
For instance, in VIOLA, users may request network
and computational resources with a dedicated QoS.
The Grid scheduler has to orchestrate the individual
reservation of network and computational resources.
These two reservations are realised as two bilateral
SLAs. The essence of distributed databases’ com-
mit protocol is the transaction: a group of individual
operations linked logically. In a distributed resource
management system, co-allocation requires multiple
bilateral SLAs. For a user or a particular service re-
quiring multiple resources, either all of the individual
bilateral SLA must be created, or none. The user SLA
creation process is a transaction composed of multiple
bilateral SLA creation.
Before reaching an agreement, two steps must be
performed: negotiation and creation. The negotia-
tion process can involve all resource providers. Its
results are input to a resource provider selection pro-
cess. When two resources are needed, e.g. network
and computing, even if the negotiation involves many
compute resource providers, only one computational
resource will be selected. For many resources offered,
the negotiation process does not lead to an SLA cre-
ation process. This is the main reason why negotia-
tion must neither obligate the provider nor the con-
sumer of the SLA. However, the SLA negotiation and
creation process should minimise the number of dis-
carded agreement creation requests when it has been
previously negotiated. This should occur only when
there is a race condition: when two or more users
are competing simultaneously for the same resource
at the same time. The separation of agreement nego-
tiation and agreement creation process and minimis-
ing the number of discarded agreement creations after
negotiation are conflicting objectives.
One way to observe atomicity of the SLA creation
DYNAMIC SLA NEGOTIATION BASED ON WS-AGREEMENT
41
is to use a transaction and to rely on a two phase
commit protocol. Once resources have been negoti-
ated, the orchestrator starts the SLA creation process
by sending an SLA creation request to the selected
resource providers. Then each resource provider re-
sponds to the request with yes or a counter offer. If
all providers agree, the orchestrator sends a commit
reservation to all systems. Upon receipt of this mes-
sage, the reservation is committed and the SLA cre-
ated. Fig. 2 (right) shows this process.
When the resource provider receives an SLA ne-
gotiation offer, its state changes from “Start” to
“Nego”. It then answers the negotiation offer by ei-
ther accepting it or making a counter offer. In case
of a counter offer, it stays in the “Nego” state. It can
also abort the negotiation and proceed to the “Abort”
state. Once the orchestrator decides to start the SLA
creation process, upon receipt of the SLA creation
request, the resource provider’s state changes to the
“Crea” state. It stays there if it accepts the reser-
vation otherwise it goes to the “Abort” state. The
final “Commit” state is reached when it receives a
“Commit” message from the orchestrator and that re-
sources are reserved and made unavailable to the rest
of the world. As mentioned above, this simple two
phase commit scenario can lead to a race condition
during the SLA creation process. While the resource
provider is in the “Crea” state, other users see the pre-
vious consistent state where resources are still avail-
able. To prevent this, the “Crea” state could imply
“locking” resources thus providing a pre-reservation
for the transaction lifetime. This prevents other users
from reserving the same resource at the same time. In
case of a lock request, second users’ transaction must
wait for the lock to be released.
Although the FSMs shown in the middle and on
the right-hand side of Fig. 2 look similar, we cannot
say that the SLA negotiation and creation process is
a three phase commit. It is a blocking protocol as de-
scribed by Skeen (Skeen, 1981). And it does not pro-
vide any guarantees against crashes. One could still
imagine a non blocking SLA creation protocol relying
on a three phase commit providing crash recovery. It
will not be discussed in this article.
4 SLA NEGOTIATION AND
CREATION WITH
WS-AGREEMENT
In order to co-allocate different types of resources
and/or resources from different domains, MSS has to
negotiate SLAs for the required resources. The eas-
iest way of SLA negotiation is a one step process,
where the context, subject and constraints of the nego-
tiation problem are defined. The WS-Agreement pro-
tocol natively supports this kind of negotiation by the
getResourceProperties method. This method returns
a set of agreement templates representing acceptable
agreement offers for an agreement provider. These
agreement templates only provide hints on agree-
ment offers which might be accepted by an agreement
provider. They do not guarantee the agreement will
be accepted. An agreement template defines one ore
more services that are specified by their Service De-
scription Terms (SDT), their Service Property Terms
(SPT), and their Guarantee Terms (GT). Additionally
an agreement provider can constrain the possible val-
ues within the SDTs, SPTs, and GTs by defining ap-
propriate creation constraints within the templates.
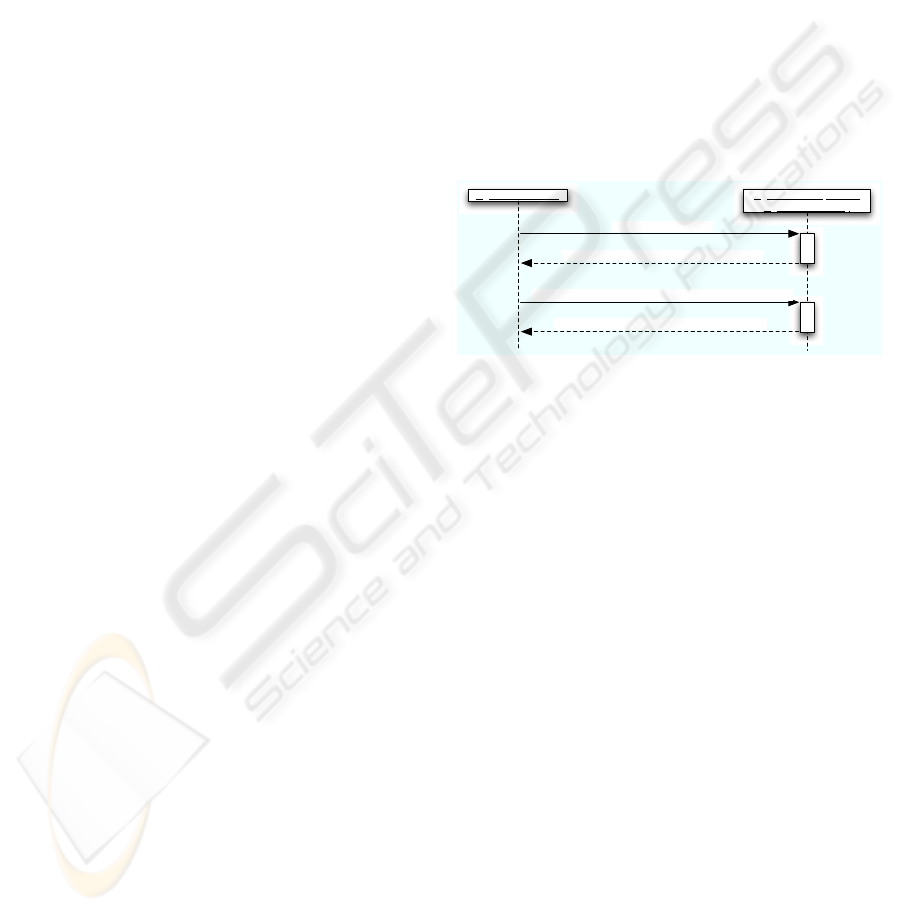
AgreementIntiator AgreementResponder:
AgreementFactory
getResourceProperty
getResourceProperty : AgreementTemplates
createAgreement (InitiatorAgreementEPR, AgrementOffer)
createAgreement (-,-) : CreatedAgreementEPR
Figure 3: WS-Agreement one step negotiation.
The creation constraints in agreement template
can be static or dynamic. Typical examples of a static
creation constraints are the minimum and maximum
numbers of CPU, nodes, or memory. As these are
properties of computing systems that are not likely
to change frequently agreement templates that only
contain static information usually are not restricted in
their lifetime.
Agreement templates can also contain more dy-
namic information. Such dynamic information can be
used to e.g. restrict the guaranteed execution time of
a given service based on the current resource avail-
ability. Since the availability of resources is likely
to change frequently, templates that contain such dy-
namic components have a short lifetime. A Grid
scheduler can use these dynamic templates to effi-
ciently find suitable time slots in order to e.g. co-
allocate resources.
However, it is not always desired to expose avail-
ability information, or sometimes it is even not pos-
sible to do this in a convenient way. A typical ex-
ample for this is the creation of an SLA in the net-
work domain. Here, it is simply not possible to in-
clude the availability information for all possible net-
work paths in a domain within one single SLA tem-
plate. This would make the templates far to complex
and therefore practically unusable. Therefore, the ef-
WEBIST 2008 - International Conference on Web Information Systems and Technologies
42
ficient agreement on time constraints in SLAs in only
one phase is simply not feasible in this case. More
advanced multi-step negotiations are needed to solve
this problem.
4.1 Negotiation of Agreement Templates
Negotiation requires an iterative process between the
parties involved. To rely on WS-Agreement and min-
imise the extensions to the proposed standard, we sug-
gest not to negotiate SLAs but to negotiate and refine
the templates that can be used to create an SLA. Here,
our focus is on the bilateral negotiation of agreement
templates.
In the following scenario we describe how an
agreement initiator (e.g. the Grid scheduler) ne-
gotiates agreement templates with two agreement
providers (e.g. a network scheduler and a CPU sched-
uler). We propose a simple offer/counter offer model.
In order to use this model in the WS-Agreement pro-
tocol, we propose a new function negotiateTemplate.
This function takes one template as input (offer), and
returns zero or more templates (counter offer). The
negotiation itself is an iterative process. In the follow-
ing scenario we describe a simple negotiation process.
During the negotiation process we call the agreement
initiator ’negotiation initiator’. Accordingly we re-
fer to the agreement providers as ’negotiation respon-
ders’.
1. Initialisation of the negotiation process
First, the negotiation initiator initialises the pro-
cess by querying a set of SLA templates from
agreement providers. To do so, it sends a stan-
dard WS-Agreement message, getResourceProp-
erty request, to agreement providers (not shown in
Fig. 4). From this templates, the initiator chooses
the most suitable one as a starting point for the
negotiation process. This template defines the
context of the subsequent iterations. All subse-
quent offers must refer to this agreement template.
This is required in order to enable an agreement
provider to validate the creation constraints of the
original template during the negotiation process,
and therefore the validity of an offer.
2. Negotiation of the template
After the negotiation initiator has chosen an
agreement template, it will create a new agree-
ment template based on the chosen one. The new
created template must contain a reference to the
originating template within its context. Further-
more, the agreement initiator may adjust the con-
tent of the new created template, namely the con-
tent of the service description terms, the service
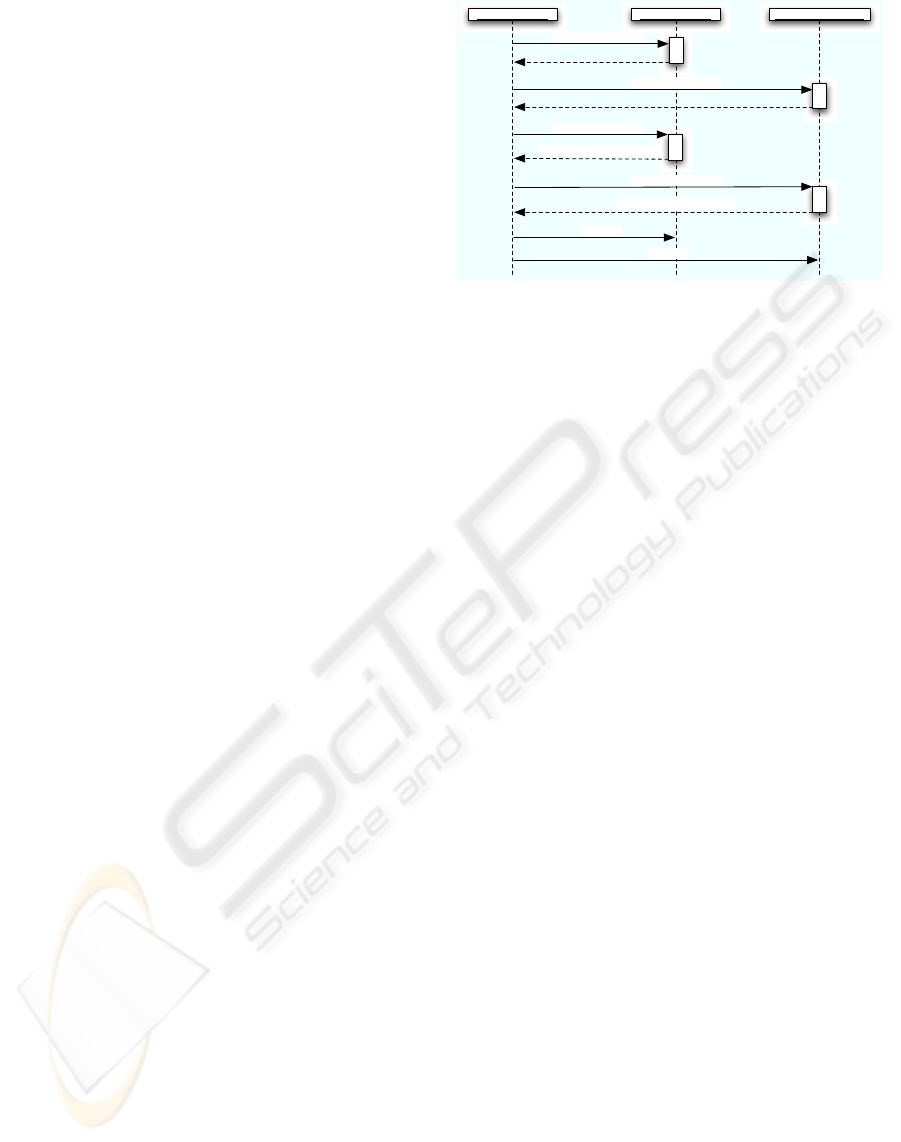
Grid Scheduler CPU Scheduler Network Scheduler
negotiateTemplate
negotiateTemplate
commit
commit
prepareAgreement
prepareAgreement : EPR
prepareAgreement
prepareAgreement : EPR
Figure 4: Extended WS-Agreement SLA negotiation.
property terms, and the guarantee terms. These
changes must be done according to the creation
constraints defined in the original template. Addi-
tionally, the negotiation initiator may also include
creation constraints within the new created tem-
plate. These constraints provide hints for the ne-
gotiation responder, within which limits the nego-
tiation initiator is willing to create an agreement.
For instance, the initial CPU scheduler template
can contain “any number of 2GHz x586 CPU be-
tween 5pm to 6pm”. And the initiator can request
“at least 5 1GHz x586 CPU anytime”. After the
initiator created the new agreement template ac-
cording to its requirements, the template is send
to respondersvia a negotiateTemplate message (as
shown in Fig. 4)
When the responder has received a negotiateTem-
plate message, it must first check the validity of
the input document (refined template). This step
includes (i) retrieving the original agreement tem-
plate that was used to create the input document,
(ii) validating the structure of the input document
with respect to the originating template, and (iii)
validating the changes of the content in the input
document with respect to the creation constraints
defined in the originating template.
Once this is done, the agreement provider now
checks whether the service defined in the request
could be provided or not. In our example, it’s only
then that the CPU scheduler decides that 5 1GHz
x586 CPUs can be provided. If the service can be
provided, it just returns the agreement template to
the client, indicating that an offer based on that
template will potentially be accepted. Otherwise,
the provider employs some strategy to create rea-
sonable counter offers. During this process the
agreement provider should take into account the
constraints of the negotiation initiator. Counter
offers are basically a set of new agreement tem-
DYNAMIC SLA NEGOTIATION BASED ON WS-AGREEMENT
43

plates that base on the template received from the
negotiation initiator. The relationship between dy-
namic created templates and original ones must
be reflected by updating the context of the new
templates accordingly. After creating the counter
offers the provider sends them back to the negoti-
ation initiator (negotiateTemplate response).
3. Post-processing of the templates
After the negotiation initiator received the counter
offers from the negotiation responder, it checks
whether one or more meets its requirements. If
there is no such template, the initiator can either
stop the negotiation process, or start again from
step 1. If there is an applicable template, the ini-
tiator validates whether there is need for an addi-
tional negotiation step or not. If yes, the initiator
uses the selected template and proceeds with step
2, otherwise the selected template is used to create
a new SLA.
4.2 SLA Creation
After the negotiation of an agreement template ac-
ceptable for both parties, the initiator needs to cre-
ate the agreement. At this point, a problem similar to
the transaction problem of distributed database sys-
tems arises. The goal of a Grid scheduler is to create
a set of SLAs with different resource providers in or-
der to provide co-allocation. Therefore, the scheduler
first negotiates a set of templates with the providers,
which identify the possible provisioning times of the
required resources. However, we must not forget that
templates only provide hints of what SLAs an agree-
ment provider might accept. There is no guarantee
associated with a template. This means that we are in
need of a strategy to create all SLAs or none. In prin-
ciple there are two major strategies to achieve this:
1. to use transactions to create the SLAs, or
2. to create each SLA within one step, applying poli-
cies to the SLA.
The usage of transaction mechanisms to create
distributed SLAs, namely the usage of the two phase
commit protocol, was already discussed in this pa-
per. Since there is no support for two phase commit
in WS-Agreement today, we need to extend the pro-
posed standard to address this problem. This process
has been started recently in the OGF working group
that created WS-Agreement. A solution consists in
adding a type of agreement that must be created in
two phases: the first phase is a creation of the agree-
ment triggered by a new prepareAgreement message
and the second with a new non-standard Commit mes-
sage as shown in Fig. 4.
The other approach is to create an SLA in one step
using today’s WS-Agreement functionalities, cancel-
lation mechanisms and incentives. In order to realise
this, we need to investigate the content of an SLA. On
one hand, an SLA describes the service and its proper-
ties. On the other hand, it specifies the guarantees for
a specific service. In a co-allocation scenario, where
a Grid scheduler uses SLAs to co-ordinate e.g. net-
work and computational resources, it employs execu-
tion guaranteesin order to assure that the different ser-
vices are provided at the same time. These guarantees
may also include costs that are associated with the ser-
vice if it is provided successfully, as well as penalties
that arise when a guarantee is violated. However, an
SLA might be prematurely terminated by the agree-
ment initiator, before the service is actually provided.
In fact, this is a cancellation of an SLA. When a ser-
vice provider guarantees a certain execution time for
a service, this normally comprises resource reserva-
tions. Therefore, the resource provider wants to pre-
vent the termination of an existing SLA. This can
be achieved by including a basic payment within the
SLA. The basic payment is potentially a very small
amount of money that is even charged if the SLA is
terminated by the agreement initiator before the ser-
vice was actually provided. It is therefore a termi-
nation penalty and represents the costs for the over-
head produced by the resource reservation. In order
to enable the Grid scheduler to efficiently negotiate
and create SLAs, there could be a certain time period
in which the SLA can be terminated without penalty.
The duration of this period can dynamically be spec-
ified during the negotiation process. The Agreement
provider could use a certain trust index in order to de-
termine the maximum length of this period. This of-
fers a feasible solution for the orchestration of multi-
ple resources using the current one-step SLA creation
of WS-Agreement.
5 CONCLUSIONS
In this paper we discussed basic functions for re-
source orchestration in Grids, namely mechanisms
to negotiate and create Service Level Agreements
using WS-Agreement. SLAs are a basic building
block for Grid resource orchestration and distributed
resource management. We have shown how a bi-
lateral WS-Agreement based negotiation process is
used to dynamically negotiate SLA templates. We
proposed an extension of the WS-Agreement proto-
col, NegotiateTemplate, in order to support a simple
offer/counter-offer model.
The second relevant part of the resource orchestra-
WEBIST 2008 - International Conference on Web Information Systems and Technologies
44

tion process is the creation of distributed SLAs. We
have discussed two different strategies to co-allocate
SLAs in Grids. One using a two phase commit with
a WS-Agreement Commit extension and one using a
single phase commit with SLA cancellation and in-
centives.
ACKNOWLEDGEMENTS
Some of the work reported in this paper is funded
by the German Federal Ministry of Education
and Research through the VIOLA project (grant
#01AK605L), by the European Commission’s IST
programme through the CoreGRID Network of Ex-
cellence (grant #004265), and by the French Ministry
of Industry through the CARRIOCAS project.
REFERENCES
Andrieux, A. et al. (2007). Web Services Agreement Spec-
ification (WS-Agreement). Grid Forum Document
GFD.107, Open Grid Forum.
Badia, R., Sirvent, R., Labarta, J., and Perez, J. M. (2006).
Programming the GRID: An Imperative Language-
based Approach. In Di Martino, B., Dongarra, J.,
Hoisie, A., Yang, L. T., and Zima, H., editors, Engi-
neering The Grid: Status and Perspective, chapter 12.
American Scientific Publishers.
Bhargava, B. (1987). Concurrency and Reliability in Dis-
tributed Database Systems. Van Nostrand Reinhold.
Briquet, C. and de Marneffe, P.-A. (2006). Grid resource
negotiation: survey with a machine learning perspec-
tive. In PDCN’06: Proceedings of the 24th IASTED
international conference on Parallel and distributed
computing and networks, pages 17–22, Anaheim, CA,
USA. ACTA Press.
Buyya, R. (2002). Economic-based Distributed Resource
Management and Scheduling for Grid Computing,
PhD Thesis. Monash University, Melbourne, Aus-
tralia.
Czajkowski, K., Foster, I., Kesselman, C., Sander, V., and
Tuecke, S. (2002). SNAP : A protocol for negotiation
of service level agreements and coordinated resource
management in distributed systems. In Proceedings
of the 8th Workshop on Job Scheduling Strategies for
Parallel Processing, pages 153–183, Edinburgh, Scot-
land.
Green, L. (2004). Service level negotiation in a heteroge-
neous telecommunication environment. In Proceeding
International Conference on Computing, Communi-
cations and Control Technologies (CCCT04), Austin,
TX, USA.
Jennings, N., Faratin, P., Lomuscio, A., Parsons, S., Sierra,
C., and Wooldridge, M. (2001). Automated negotia-
tion: Prospects, methods and challenges. Group De-
cision and Negotiation, 10(2):199–215.
Joita, L. and Rana, O. (2006). WS-Agreement Use in CAT-
NETS. Technical report, School of Computer Science
and Welsh eScience Centre, Cardiff, UK.
Keller, A. (2007). openCCS: Computing Center Software.
Technical report, Paderborn Center for Parallel Com-
puting, Paderborn, Germany.
Kohler, W. (1981). A Survey of Techniques for Synchro-
nization and Recovery in Decentralized Computer
Systems. ACM Computing Surveys, 13(2):148–183.
Kuo, D., Parkin, M., and Brooke, J. (2006a). A Framework
& Negotiation Protocol for Service Contracts. In Pro-
ceedings of the 2006 IEEE International Conference
on Services Computing (SCC 2006), pages 253–256.
Kuo, D., Parkin, M., and Brooke, J. (2006b). Negotiating
contracts on the grid. In Exploiting the Knowledge
Economy - Issues, Applications, Case Studies, Volume
3, Proceedings of the eChallenges 2006 (e-2006) Con-
ference, Amsterdam, The Netherlands. IOS Press.
MacLaren, J. (2007). Co-allocation of Compute and
Network resources using HARC. In Proceed-
ings of ”Lighting the Blue Touchpaper for UK e-
Science: closing conference of ESLEA Project”
(PoS(ESLEA)016).
Mobach, D., Overeinder, B., and Brazier, F. (2006). A WS-
Agreement Based Resource Negotiation Framework
for Mobile Agents. Scalable Computing: Practice
and Experience, 7 (1):23 – 36.
Oszu, M. and Valduriez, P. (1991). Principles of Distributed
Database Systems. Prentice Hall.
Shakun, M., editor (2002). Group Decision and Negotia-
tion. Springer Netherlands.
Shen, W., Ghenniwa, H. H., and Wang, C. (2002). Adap-
tive Negotiation for Agent-Based Grid Computing. In
Proceedings of AAMAS2002 workshop on agentcities:
Challenges in Open Agent Environments, pages 32–
36, Bologna, Italy.
Skeen, D. (1981). Nonblocking Commit Protocols. In Pro-
ceedings of ACM SIGMOD Int’l Conf. Management
of Data, pages 133–142.
Wieder, P., W¨aldrich, O., and Ziegler, W. (2005). A meta-
scheduling service for co-allocating arbitrary types of
resources. In Proceedings of the 6th International
Conference, Parallel Processing and Applied Math-
ematics, PPAM 2005, volume 3911 of LNCS, pages
782 – 791, Poznan, Poland. Springer.
DYNAMIC SLA NEGOTIATION BASED ON WS-AGREEMENT
45
