
LOCAL SEARCH AS A FIXED POINT OF FUNCTIONS
Eric Monfroy, Fr´ed´eric Saubion
University of Nantes, University of Angers, France
Broderick Crawford, Carlos Castro
Pontificia Universidad Cat´olica de Valpara´ıso, Universidad T´ecnica Federico Santa Mar´ıa, Valpara´ıso, Chile
Keywords:
Constraint Satisfaction Problems (CSP), Local Search, Constraint Solving.
Abstract:
Constraint Satisfaction Problems (CSP) provide a general framework for modeling many practical applica-
tions (planning, scheduling, time tabling, ...). CSPs can be solved with complete methods (e.g., constraint
propagation), or incomplete methods (e.g., local search). Although there are some frameworks to formalize
constraint propagation, there are only few studies of theoretical frameworks for local search. Here we are
concerned with the design and use of a generic framework to model local search as the computation of a fixed
point of functions.
1 INTRODUCTION
A Constraint Satisfaction Problems (CSP) (Tsang,
1993) is usually defined by a set of variables asso-
ciated to domains of possible values and by a set of
constraints. We only consider here CSP over finite
domains. Constraints can be understood as relations
over some variables and therefore,solving a CSP con-
sists in finding tuples that belong to each constraint
(an assignment of values to the variables that satisfies
these constraints).
From a practical point of view, CSP can be solved
by using either complete (such as constraint propaga-
tion (Apt, 2003)) or incomplete techniques (such as
local search (Aarts and Lenstra, 1997) or genetic algo-
rithms (Holland,1975)). Therefore, constraintsolvers
mainly rely on the implementation and combination
of these techniques. Local search techniques (Aarts
and Lenstra, 1997) have been successfully applied to
various combinatorial optimization problems.
In the CSP solving context, local search algo-
rithms are used either as the main resolution tech-
nique or in cooperation with other resolution pro-
cesses (e.g., constraint propagation) (Focacci et al.,
2002; Jussien and Lhomme, 2002). Unfortunately,
the definitions and the behaviors of these algorithms
are often strongly related to specific implementations
and problems. Our purpose is to use a framework
based on functions to provide uniform modeling tools
which could help better understanding local search al-
gorithms and designing new ones.
From a more conceptual and theoretical point of
view, K.R. Apt has proposed a mathematical frame-
work (Apt, 1997; Apt, 2003) for iteration of a finite
set of functions over “abstract” domains with partial
ordering: this is well-suited for solving CSPs with
constraint propagation.
To obtain a finer definition of local search, in
(Monfroy et al., 2008) we proposed a computation
structure (the domain of Apt’s iterations)which is bet-
ter suited for local search. We defined the basic func-
tions that can be used iteratively on this structure to
create a local search process. We identified the basic
processes used for intensification and diversification
(move and neighborhood computation) and the pro-
cess for jumping to other parts of the search space
(restart). These three processes are abstracted at the
same level by some homogeneous functions called re-
duction functions. The result of local search is then
computedas a fixed point of this set of functions. Pos-
sible uses of this framework are illustrated through
the description of existing strategies such as descent
algorithms (WalkSat) and tabu search (Jaumard et al.,
1996).
431
Monfroy E., Saubion F., Crawford B. and Castro C. (2008).
LOCAL SEARCH AS A FIXED POINT OF FUNCTIONS.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - AIDSS, pages 431-434
DOI: 10.5220/0001681804310434
Copyright
c
SciTePress

2 SOLVING CSP WITH LOCAL
SEARCH
A CSP is a tuple (X,D,C) where X = {x
1
, ··· , x
n
} is a
set of variables taking their values in their respective
domains D = {D
1
, ··· , D
n
}. A constraint c ∈ C is a
relation c ⊆ D
1
× · ·· × D
n
1
. In order to simplify no-
tations, D will also denote the Cartesian product of D
i
and C the union of its constraints. A tuple d ∈ D is a
solution of a CSP (X, D,C) if and only if ∀c ∈ C, d ∈ c.
In this paper, we always consider D finite.
For the resolution of a CSP (X, D,C), the search
space can be often defined as the set of possible tu-
ples of D = D
1
× · ·· × D
n
and the neighborhood is a
mapping N : D → 2
D
.
This neighborhood function defines indeed the
possible moves from a sample (i.e., a tuple in this
case) to one of its neighbors and therefore fully de-
fines the exploration landscape. The fitness (or eval-
uation) function eval is related to the notion of solu-
tion and can be defined as the number of constraints c
that are not satisfied by the current sample, i.e., con-
straints such that d 6∈ c (d being the currently visited
sample, i.e., an element of D in this case). The prob-
lem to solve is then a minimization problem. Given a
sample d ∈ D, two basic cases can be identified in or-
der to continue the exploration of D: Intensification,
choose d
′
∈ N (d) such that eval(d
′
) < eval(d); Di-
versification, choose any other neighbor d
′
. In order
to integrate possiblerestarts (to start new paths) and to
generalize this approach we will consider local search
as a set of basic local searches.
3 LOCAL SEARCH AS A FIXED
POINT OF REDUCTION
FUNCTIONS
Local search acts usually on a structure which cor-
responds to points of the search space. In (Monfroy
et al., 2008) we propose a more general and abstract
definition based on the notion of sample, already sug-
gested. In our framework, local search is described as
a fixed point computation.
1
For simplicity, we consider that each constraint is
over all the variables x
1
, . . ., x
n
. However, one can con-
sider constraints over some of the x
i
. Then, the notion of
scheme (Apt, 2003) can be used to denote sequences of vari-
ables.
3.1 Chaotic Iterations
K.R. Apt proposed chaotic iterations (Apt, 2003), a
general theoretical framework for computing limits of
iterations of a finite set of functions over a partially
ordered set. In this paper, we do not recall all the
theoretical results of K.R. Apt, but we just give the
GI algorithm for computing fixed point of functions.
Consider a finite set F of functions, and d an element
of a partially ordered set D .
GI: Generic Iteration Algorithm.
d :=⊥;
G := F;
While G 6=
/
0 do
choose g ∈ G;
G := G− {g};
G := G∪ update(G, g,d);
d := g(d);
where ⊥ is the least element of the partial ordering
(D , ⊑), G is the current set of functions still to be
applied (G ⊆ F), and for all G,g, d the set of functions
update(G, g, d) from F is such that:
P1 { f ∈ F − G | f(d) = d ∧ f(g(d)) 6= g(d)} ⊆
update(G, g, d).
P2 g(d) = d implies that update(G, g,d) =
/
0.
P3 g(g(d)) 6= g(d) implies that g ∈ update(G, g, d)
Suppose that all functions in F are reduction func-
tions as defined before and that (D , ⊑) is finite (note
that finiteness is important as is has already been men-
tioned for our structure). Then, every execution of the
GI algorithm terminates and computes in d the least
common fixed point of the functions from F. We now
use the GI algorithm to compute the fixed point of our
functions. The algorithm is thus feed with: a) a set
of fair restart functions, fair move and neighborhood
functions, that compose the set F; b) initial instanti-
ation of d, and c) the ordering that we use is the or-
dering ⊑. Unfortunately,the properties P1, P2 and P3
required in (Apt, 2003) for the update functions (to
insure the computation of the fixed point) do not fit
our extended functions. Indeed, our extended func-
tions are not deterministic and can modify a whole
local search even if a previous application did not.
This is due to the fact that the select function may
choose a configuration which may not be modified by
a move (or a neighborhood) function whereas another
configuration would be modified by the same move
(or neighborhood) function. However, remember the
fairness property of the select function: if one con-
figuration can be changed by a move (or neighbor)
function, then this configuration will not be neglected
forever; and a sample will not be neglected forever by
ICEIS 2008 - International Conference on Enterprise Information Systems
432

a restart function. Informally, the declarative defini-
tion of the update means:
P1 put in the update(G, g,d) all functions not cur-
rently in G that will modifyg(d). This insures that
all effective functions will be re-applied (correct-
ness of the algorithm), whereas ineffective func-
tions will not be added (efficiency reasons).
P2 to ensure termination.
P3 to add g again if it must be re-used.
The update must satisfy the following properties:
P’1 { f ∈ F − G | ∀ f(d) = d ∧ ∃ f(g(d)) 6= g(d)} ⊆
update(G, g, d).
P’2 ∀g(d) = d implies that update(G, g, d) =
/
0
P’3 ∃g(g(d)) 6= g(d) implies that g ∈ update(G, g, d)
Basically, we need to put in the update set of
functions, functions that potentially will modify d,
the current whole local search. In these conditions,
the algorithm terminates and computes the least com-
mon fixed point of the functions from F, i.e., the
result of the whole local search. Inspired by (Apt,
2003), the proof partially relies on an invariant ∀ f ∈
F − G, f(d) = d of the “while” loop in the algorithm.
This invariant is preserved by our characterization of
the update function (P’1, P’2 and P’3). Moreover,
since we keep a finite partial ordering and a set of
monotonic and inflationary functions, the results of
K.R. Apt can be extended here.
4 EXPERIMENTATION
The Sudoku problem consists in filling a 9 × 9 grid
so that every row, every column, and every 3× 3 box
contains the digits from 1 to 9. Although Sudoku,
when generalized to n
2
x n
2
grids to be filled in by
numbers from 1 to n
2
is NP-complete, the popular
9 × 9 grid with 3 × 3 regions is not difficult to solve
with a computer program. Therefore, in order to in-
crease the difficulty, we consider 16× 16 grids (pub-
lished under the name ”super Sudoku”), 25 × 25 and
36 × 36 grids. On this problem, we will show that
our generic framework allows us to easily define local
search algorithms and to combine and compare them.
4.1 CSP Model
Consider a n
2
x n
2
problem, an instinctive formaliza-
tion consider a set of n
4
variables whose correspond,
to all the cells to fill in. Using this, the set of related
constraints is defined by AllDiff global contraints rep-
resenting: a) all digits appears only once in each row,
b) once in each column and c) once in each n × n
square the grid has been subdivided. Concerning LS
methods we focus on Tabu search (TS) (Glover and
Laguna, 1997). Basically, this algorithm forbidsmov-
ing to a sample that was visited less than l steps be-
fore. To this end, the list of the last l visited sam-
ples is memorized. On the other hand, we consider
a basic descent technique with random walks (RW)
where random moves are performed according to a
certain probability p. According to our model, we
only have now to design functions of the generic al-
gorithm of Section 3.1 to model strategies. Neigh-
bodhood functions are functions C → C such that
(p,V) 7→ (p,V ∪V
′
) with different conditions:
FullNeighbor : V
′
= {s ∈ D|s 6∈ V}
TabuNeighbor : V
′
= {s ∈ D| 6 ∃k,
n− l ≤ k ≤ n, s
k
= s}
DescentNeighbor : p = (s
1
, . . . , s
n
) and
V
′
= s ⊂ D s.t. 6 ∃s
′
∈ V
s.t. eval(s
′
) < eval(s
n
)
Move functions are functions C → C
s.t. (p,V) 7→ (p
′
,
/
0) with various conditions:
BestMove : p
′
= p⊕ s
′
and
eval(s
′
) = min
s
′′
∈V
eval(s
′′
).
ImproveMove : p = p
′′
⊕ s
n
and
p
′
= p⊕ s s.t. eval(s
′
) < eval(s
n
).
RandomMove : p
′
= p⊕ s
′
and s
′
∈ V.
We can precise here the input set of function F for
algorithm GI:
Tabusearch : {TabuNeighbor
;BestNeighBor}
Randomwalk : {FullNeighbor
;BestNeighBor;
RandomNeighbor}
TabuSearch+ Descent : {TabuNeighbor
;DescentNeighbor
;ImproveNeighBor
;BestNeighBor}
Randomwalk+ Descent : {FullNeighbor
;BestNeighBor
;RandomNeighbor
;DescentNeighbor
;ImproveNeighBor}
The different algorithms correspond to different
sets of input functions and different behaviours of
the choose function in the GI algorithm. choose
alternatively selects neighborhood and move func-
tions. For the Random Walk algorithm, given a prob-
ability parameter p, we have to introduce a quota
of p BestMove functions and 1 − p RandomMove
LOCAL SEARCH AS A FIXED POINT OF FUNCTIONS
433
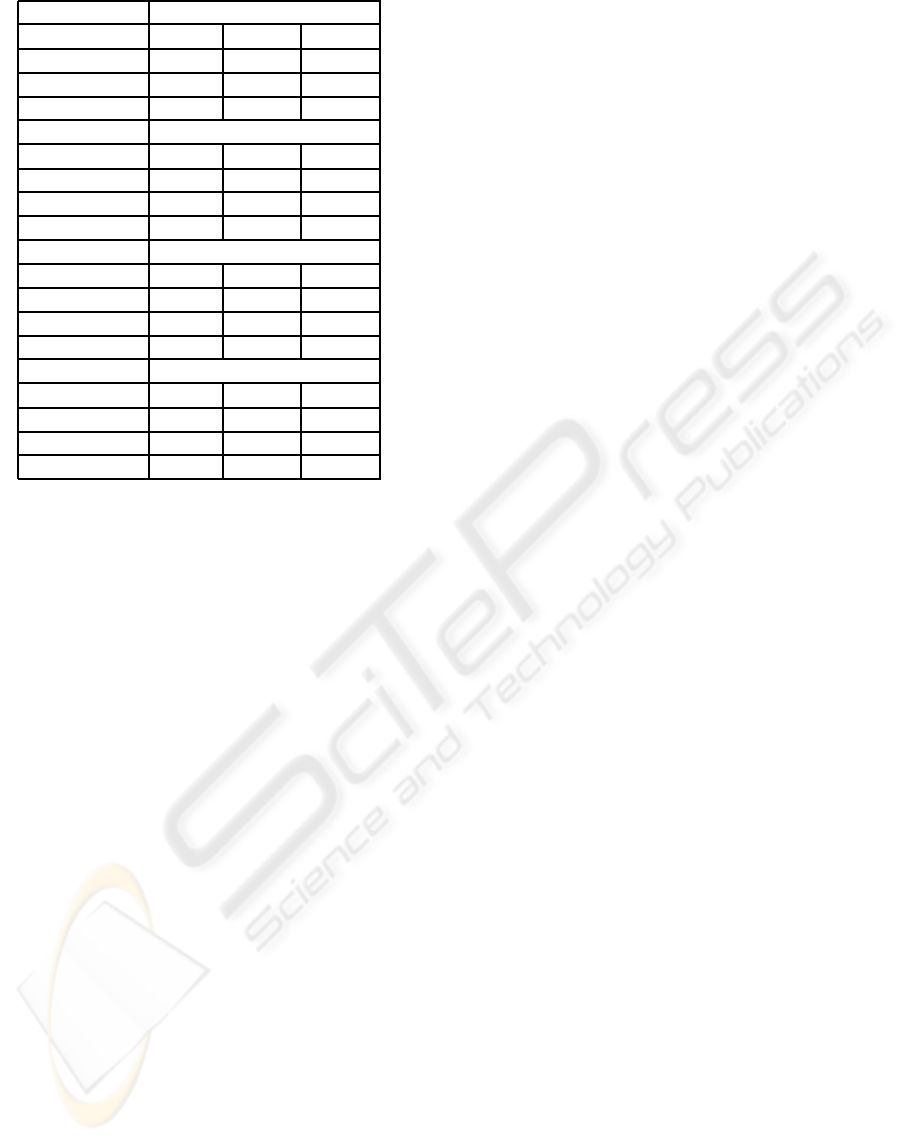
TabuSearch
n
2
x n
2
16x16 25x25 36x36
cpu time Avg 3,14 115,08 3289,8
deviations 1,28 52,3 1347,4
mvts Avg 405 3240 22333
RandomWalk
n
2
x n
2
16x16 25x25 36x36
cpu time Avg 3,92 105,22 2495
deviations 1,47 49,3 1099
mvts Avg 443 2318 13975
Descent + TabuSearch
n
2
x n
2
16x16 25x25 36x36
cpu time Avg 2,34 111,81
deviations 1,42 55,04
mvts Avg 534 3666
Descent +RandomWalk
n
2
x n
2
16x16 25x25 36x36
cpu time Avg 2,41 82,94 2455
deviations 1,11 36,99 1092
mvts Avg 544 2581 14908
Figure 1: Results of Sudoku problem by different search
approaches.
used in GI. Concerning Tabu Search, we use here a
TabuNeighbor with l = 10 and BestMove functions
to built our Tabu Search algorithm. At last, we com-
bine a descent strategy by adding DescentNeighbor
and ImproveMove to the previous sets in order to de-
sign algorithms in which a Descent is first applied in
order to reach more quickly a good configuration.
4.2 Experimentation Results
In Fig. 1 we compare results of the tabu search and
random walks associated with descent on different
instances of Sudoku problem. We have evaluated
the difficulty of the problem with a classic com-
plete method (propagation and split): we obtained
a more than one day cpu time cost for a 36 × 36
grid. At the opposite, by a simple formalization of the
problem and thanks to a function application model,
we are able to reach a solution with classical local
search algorithms starting from an empty grid. For
each method and for each instance, 2000 runs were
performed (except for 36 × 36 problem, 500 runs).
Adding descent in a Tabu Search or in a Random
Walk method, allows us to reduce the computation
time to reach a solution. The hybrid strategies com-
bining several move and neighborhood functions pro-
vide better results.
5 CONCLUSIONS
In this paper, we have used a framework to model lo-
cal search as a fixed point of functions for solving
Sudoku. This framework provides a computational
model inspired in the initial works of K.R. Apt (Apt,
2003). It helps us to finer define the basic processes
of local search at a uniform description level and to
describe specific search strategies. This mathemati-
cal framework could be helpful for the design of new
local search algorithms, the improvement of existing
ones and their combinations. Our framework could
also be used for experimental studies as it provides a
uniform description framework for various methods
in an hybridization context.
REFERENCES
Aarts, E. and Lenstra, J. K., editors (1997). Local Search
in Combinatorial Optimization. John Wiley & Sons,
Inc., New York, NY, USA.
Apt, K. R. (1997). From chaotic iteration to constraint prop-
agation. In Degano, P., Gorrieri, R., and Marchetti-
Spaccamela, A., editors, ICALP, volume 1256 of
Lecture Notes in Computer Science, pages 36–55.
Springer.
Apt, K. R. (2003). Principles of Constraint Programming.
Cambridge Univ. Press.
Focacci, F., Laburthe, F., and Lodi, A., editors (2002). Lo-
cal Search and Constraint Programming. In F. Glover
and G. Kochenberger, editors, Handbook of Meta-
heuristics, volume 57 of International Series in Op-
erations Research and Management Science. Kluwer
Academic Publishers, Norwell, MA.
Glover, F. and Laguna, F. (1997). Tabu Search. Kluwer
Academic Publishers, Norwell, MA, USA.
Holland, J. H. (1975). Adaptation in Natural and Artificial
Systems. University of Michigan Press.
Jaumard, B., Stan, M., and Desrosiers, J. (1996). Tabu
search and a quadratic relaxation for the satisfiabil-
ity problem. DIMACS Series in Discrete Mathematics
and Theoretical Computer Science, 26:457–478.
Jussien, N. and Lhomme, O. (2002). Local search with con-
straint propagation and conflict-based heuristics. Artif.
Intell., 139(1):21–45.
Monfroy, E., Saubion, F., Crawford, B., and Castro, C.
(2008). Towards a formalization of combinatorial
local search. In Proceedings of the International
MultiConference of Engineers and Computer Scien-
tists, IMECS, March 19-21, 2008, Hong Kong, China,
Lecture Notes in Engineering and Computer Science.
Newswood Limited.
Tsang, E. (1993). Foundations of Constraint Satisfaction.
Academic Press, London.
ICEIS 2008 - International Conference on Enterprise Information Systems
434
