
A JOINT OPTIMIZATION ALGORITHM FOR DISPATCHING
TASKS IN AGENT-BASED WORKFLOW MANAGEMENT
SYSTEMS
Pavlos Delias, Anastasios Doulamis and Nikolaos Matsatsinis
Dept. of Production Engineering and Management, Technical University of Crete, University Campus, Chania, Greece
Keywords: Task allocation, agent-based workflow, workflow management systems, joint optimization.
Abstract: Workflow problems generally require the coordination of many workers; machines and computers. Agents
provide a natural mechanism for modelling a system where multiple actors operate, but they do not
explicitly support coordination schemes. Efficient task allocation to these actors is a fundamental
coordination prerequisite. A competent allocation policy should address both system performance issues and
users’ quality demands. Since these factors are often contradictory, an efficient solution is hard to be
identified. In this study, we suggest a task delegation strategy that jointly optimizes system performance (as
expressed by workload balancing) and quality demands (as expressed by minimum task overlapping). A
consistent modelling approach allows us to transform data of both these factors into a matrix format. The
next step is to exploit the Ky-fan theorem and the notion of generalized eigenvalues to optimally solve the
task allocation problem. A simple scheduling policy and an experimental setup were applied to test the
efficiency of the proposed algorithm.
1 INTRODUCTION
Workflow Management Systems (WfMS) manage
business processes through Process Definitions
(WfMC, 1999). A process definition consists of a
network of activities, while it specifies not only
which tasks are performed and their order, but also
those who perform them as well. In fact, what is
commonly specified is the performer’s organization
role rather than the actual actor. This information is
to be defined by the process modeller during the
build time. Yet, during run-time, the actual actor
who will finally be in charge of the activity must be
decided. Such decisions are configured by the task
allocation policies of the system and their execution
is a critical workflow enactment service. It is
through a task allocation policy that an initial order
on workflow participants is imposed and that
process instances are executed in accordance with
their definitions.
An efficient task allocation policy should address
performance criteria (such as throughput; computing
speed, etc.) and quality criteria, as being defined by
the customers. Three general evaluation criteria are
proposed to assess the allocation decision, Quality;
Cost and Time (O'Brien & Wiegand, 1998). A
slightly different set of criteria replaces the
“Quality” with “Constraints” and “Success”
(Debenham, 2002). Although these criteria outline a
comprehensive framework, their interpretation into
measurable factors could be rather ambiguous. To
overcome this ambiguity, (O'Brien & Wiegand,
1998) and (Debenham, 2002) use an agent
negotiation context. The incorporation of Service
Level Agreements (SLA’s) to bind the negotiation
process is an intuitive way to quantify the evaluation
criteria (Jennings, Norman, Faratin, O'Brien, &
Odgers, 2000; Shepherdson, Thompson, & Odgers,
1999).
A different approach concerning agent-based
WfMS is to use a hierarchical structure to dispatch
tasks. A central entity is responsible to decide an
allocation plan that is later notified to the task
executors. The coordination agent of (Madhusudan,
2005) is enabled to dynamically allocate tasks; while
a central “Judging Machine” matches agents and
work items in (Qiu, Wang, & He, 2005). Manager
agents may also assign task as one of their ordinary
duties (Aye & Tun, 2005; Manmin & Huaicheng,
1999). A special decision-making agent in (Xu, Qiu,
199
Delias P., Doulamis A. and Matsatsinis N. (2008).
A JOINT OPTIMIZATION ALGORITHM FOR DISPATCHING TASKS IN AGENT-BASED WORKFLOW MANAGEMENT SYSTEMS.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - AIDSS, pages 199-206
DOI: 10.5220/0001688601990206
Copyright
c
SciTePress

& Xu, 2003) combines data from its peer agents
according to the business rules; workflow
specification; and workflow process definition to
give a list of optimal advices for its own
organization. In (Cao, Wang, Zhang, & Li, 2004) the
assignment decision (service calling) is based on
services’ QoS.
Following (Zur Muehlen, 2004), the property
that classifies the above methodologies into different
categories is with respect to their synchronization
mechanism. According to his classification scheme,
workflow coordination is a property of
synchronization, and three alternatives for
coordinating an allocation policy can be identified:
the hierarchical mode; the negotiation mode and the
scheduling-oriented one. Methods of the first
category are not scalable as they are prone to
bottlenecks, while methods of the second category
can operate only in a fully automated environment.
In this paper, we will advocate that a
methodology of the third category (a scheduling-
oriented one) can overcome these pitfalls, while
providing an efficient and optimized allocation
scheme. Most of the methods proposed for
scheduling-oriented allocation in agent-based WfMS
exploit simplified techniques, such as the First-
Come-First-Served (FCFS); Earlier-Deadline-First
(EDF); and Least-Laxity-First (LLF). However, the
aforementioned schemes determine the order in
which the tasks are considered for assignment to
agents and they cannot be used to determine the
specific agent on which the selected tasks are
assigned to. Besides, these rules do not optimize the
user’s quality requirements as far as the tasks are
concerned (e.g., tasks’ deadlines).
User’s requirements, however, are often
contradictory. Meeting the requirements of one user
should not be achieved by sacrificing the
requirements of another user. When the desired
users’ requirements cannot be fulfilled, we should
assign the tasks to the available agents in order to
minimize degradation of the user’s quality demands.
On the other hand, a successful scheduling
scheme should maximize the overall system
performance (i.e., workload balancing) so that the
system design is not wasteful. To the authors’
knowledge, there is not any optimal strategy which
dispatches tasks to the available agents in a way that
the a) degradation of user’s quality requirements is
minimized while simultaneously b) the workload
optimally balanced. In this paper, such an optimal
strategy is proposed exploiting concepts from the
Ky-Fan theorem (Nakic & Veselic, 2003). The Ky-
Fan theorem states that the two above mentioned
criteria can be solved by the use of a generalized
eigenvalue problem.
The optimization criteria and the modelling of
our approach are presented in the next section. In
section 3 & 4 we present the proposed algorithm and
discuss its efficiency. Experimental results and
further discussion conclude the paper.
2 MODELLING APPROACH
2.1 The Task Dispatching Process
We adopt the concept and terminology of WfMC
(WfMC, 1999) that defines a business process as a
network of atomic activities. Each activity is a
logical piece of work that can be executed
individually by one actor. In this paper, the terms
“activity” and “task” will be used interchangeably.
Since a process is a directed graph, each activity
may or may not have dependencies with other ones.
These dependencies are explicitly described in the
process definition, thus they are considered a priori
known.
We consider a Time Window T when P
processes demand for execution. This time window
can be considered as a time interval after which a
new dispatching procedure is activated. The system
can decompose these processes into atomic tasks
through the available process definitions, so it is
equivalent to say that a set of tasks demands for
execution. Let us denote these tasks as
p
i
T ,
i=1,2,..,N, p=1,2,…,P. Variable N denotes the
number of tasks, belonging to P process instances,
that ultimately request to be executed by an agent in
the system. An agent may be either a software entity
or a human. In any case, they must hold the
following critical assumption: all agents are capable
of executing all tasks. This assumption is necessary
for letting us focus on the scheduling-orientation of
the proposed allocation scheme. In a later section,
we discuss how this limitation can be tackled.
Let us also denote as
p
ST the desired Start Time
for the process instance p and as
p
FT
the desired
Finish Time for the respective process instance.
Activities’ Start Times and Finish Times are denoted
similarly as
p
i
ST
and
p
i
FT
respectively. Assuming
that we know (or we can estimate) the execution
duration
i
d of each activity and the Start Time for
every process, the system can easily calculate the
Start Time and the Finish Time for every task in the
system. For the sake of simplicity, we may ignore
ICEIS 2008 - International Conference on Enterprise Information Systems
200

the p index of the task notation for the rest of the
paper, as we address the allocation issue globally
and not respective to a process-level.
In this paper, we assume that the tasks are
assigned in a non-preemptable, non-interruptible
way. A task is said to be non-preemptable if once it
begins execution by an agent, it has to be completed
by that agent. Additionally, a task is said to be non-
interruptible if once it starts execution it cannot be
interrupted by other tasks and resume execution
later. Under this assumption, once a task has been
assigned to an agent for execution and another task
requests for service during the execution time
interval, then, the latter task should be assigned
either to another agent (which is not reserved at the
requested time interval) or undergo violation of its
quality requirement, i.e., its deadline. To prevent this
from happening, we define as
ij
z
the non-
overlapping measure between tasks
i
T
and
j
T
(Tasks
i
T
and
j
T may or may not belong to the
same process instance). Since non-overlapping is the
desired situation, we define
ij
z
as
, non-overlapped
0 , overlapped
ij
ij
ij
aTT
z
TT
⎧
⎪
=
⎨
⎪
⎩
(1)
where
0>
α
any positive non-zero value.
Finally, we need to denote as
m
A
the set of all
tasks executed by the m
th
agent. Sets
m
A
, for
different agents m, m=1,2,…,M, are mutually
exclusive, meaning that a task cannot be split and
executed collectively by different agents, assuming a
non-interruptible scheduling scenario.
2.2 Optimization Criteria
Recalling from section 1, an efficient allocation
policy is the one that maximizes i) the percentage of
the active agents (optimizes the workload balancing)
while ii) simultaneously minimizes the distortion of
the tasks’ quality requirements. The first condition is
of critical importance for the system performance,
since, otherwise, resources are wasted (agent
idleness) or not properly used (task overloading).
The second condition states that the allocation policy
should respect user’s quality parameters as much as
possible. We evaluate violation of deadlines and
non-dedicated execution of tasks as quality metrics.
When an agent executes at the same time more than
one activity, it will inevitably split his capacity
across the activities. This will lead to broken
deadlines and potentially to reduced quality of the
deliverable.
Based on the above mentioned requirements, we
infer two optimization criteria: a) Workload
balancing as the minimization of the non-
overlapping measure among tasks of different agents
and b) Quality of Service (QoS) as the maximization
of the same non-overlapping measure among all the
tasks dispatched to a specific agent. Using equation
(1), one can express the non-overlapping degree
among tasks of different agents as the sum of the
non-overlapping degrees of all tasks assigned to the
m
th
agent with the rest ones, normalized over the
sum of non-overlapping degrees between tasks in the
m
th
and all tasks, pending in the system. The
corresponding equation is:
,
,
mm
m
ij
iA jA
m
ij
iA jV
z
W
z
∈∉
∈∈
=
∑
∑
(2)
where
V is the set of the pending tasks.
Low values of
m
W mean that many other agents
in the system are concurrently active with the
m
th
agent. On the contrary, as
m
W increases, the number
of concurrently active agents with the
m
th
one
decreases. In the same way, we can express QoS as:
,
,
mm
m
ij
iA jA
m
ij
iA jV
z
Q
z
∈∈
∈∈
=
∑
∑
(3)
The numerator of (3) expresses the sum of the
non-overlapping degrees for all tasks of the
m
th
agent. The denominator of equations (2) and (3)
expresses the non-overlapping values of the tasks
executed by agent
m with all the N tasks including
the ones that are executed by the
m
th
. The
denominator is used in (2) and (3) for normalization
purposes. Instead, optimizing only the numerator of
(3) would favour the trivial solution of one task per
processor. The
m
Q expresses a measure of the
overall QoS violation for the tasks’ assigned to the
m
th
agent. As
m
Q increases, tasks’ overlapping, thus
QoS violation decreases for the
m
th
agent.
It is quite straightforward to generalize the above
optimization metrics. The overall QoS violation
measure will be
1
M
m
m
QQ
=
=
∑
(4)
while the global workload balancing index will be
A JOINT OPTIMIZATION ALGORITHM FOR DISPATCHING TASKS IN AGENT-BASED WORKFLOW
MANAGEMENT SYSTEMS
201

1
M
m
m
WW
=
=
∑
(5)
The ultimate goal of our allocation policy will be
to maximize
Q while simultaneously minimize W.
Combining equations (2), (3), (4) and (5), we get
WQM+=
(6)
recalling from section 2.1 that
M stands for the
number of available agents.
Since
M is a constant number, equation (6)
means that
maximization of Q simultaneously yields
a minimization of
W and vice versa. Hence, in our
problem, the two aforementioned optimization
requirements are in fact identical and they can be
satisfied in parallel. Therefore, it is sufficient to
optimize only one of the two criteria. In our case,
and without loss of generality, we select to minimize
W, estimating an optimal task assignment to the M
agents, that is a dispatching policy which minimizes
the following equation
,
1
,
ˆ
:min min ,
mM
m
ij
M
iA jA
m
ij
m
iA jV
z
A
Wm
z
∈∉
=
∈∈
=∀
∑
∑
∑
(7)
wher
e
ˆ
m
A
, is the estimated set of tasks executed by
the
m
th
agent
3 THE TASK DISPATCHING
ALGORITHM
Optimization of equation (7) is a NP-complete
problem. Even for the toy case of two agents,
(
M=2), the optimization of (7) is practically
impossible to be implemented for large number of
tasks. However, we can overcome this difficulty by
transforming the problem of (7) into a matrix based
representation. Then, an approximate solution in the
discrete space can be found using concepts derived
from eigenvalue analysis.
3.1 Matrix Representation
Let us denote as
[]
ij
z
=Z
a matrix which contains
the values of the non-overlapping measure
ij
z
for
all tasks
i
T and
j
T
. Let us also denote an Νx1
indicator vector
[]
uT
mm
e=e LL
whose elements
u
m
e
are given by
1 if task is executed by agent
0 Otherwise
u
u
m
Tm
e
⎧
=
⎨
⎩
(8)
The indicator vector
m
e points out which tasks
are allocated to whom.
M different indicator vectors
exist, one per agent. Therefore, the optimization
problem of (7) is equivalent to the estimation of the
optimal indicators vectors
ˆ
,
m
m∀e which minimize
equation (7). Consequently, equation (7) can be
written as
,
1
,
ˆ
,:min min
mM
m
ij
M
iA jA
m
ij
m
iA jV
z
mW
z
∈∉
=
∈∈
∀=
∑
∑
∑
e
(9)
The main difficulty in (9) is that its right part is
not expressed as a function of the indicator vectors
m
e . Since direct minimization is not
straightforward, we need to re-write the right part of
equation (9) in a form of vectors
m
e . For this
reason, let us denote as
)( LL
i
ldiag=L
a diagonal
matrix, whose elements
i
l
, i=1,2,..N express the
cumulative non-overlapping degree of the task
i
T
with all the remaining tasks. That is
iij
j
lz=
∑
(10)
Using matrices
L and Z, we can express the
numerator of (9) as a function of vectors
m
e . In
particular,
,
()
mm
T
mm ij
iA jA
z
∈∉
−=
∑
eLZe
(11)
In a similar way, the denominator of (9) is
related with the indicator vector
m
e as follows
,
m
T
mm ij
iA jV
z
∈∈
=
∑
eLe
(12)
Using (11) and (12), we can re-write (9) as
1
()
ˆ
,:min min
M
T
mm
m
T
mm
m
mW
=
−
∀=
∑
eLZe
e
eLe
(13)
3.2 Optimization in the Continuous
Domain
Assuming non-interruptible tasks, we allow agents
either to undertake the whole task; or let another
agent do the work. That means that the
m
e vectors
take binary values (1 for assignment, 0 otherwise).
In other words, we can form the indicator matrix
ICEIS 2008 - International Conference on Enterprise Information Systems
202

[]=
1M
Ee eL , the columns of which refer to the M
system agents, while the rows to the
N tasks. Then,
the rows of E have only one value equal to one
while all the rest values are zero
. Optimization of
(13) under the binary representation of the indicator
matrix E is still a NP hard problem. However, if we
relax the indicator matrix E to take values in
continuous domain, then we can solve the problem
in polynomial time. We call
M
E the relaxed version
of the indicator matrix
E. The elements of the
relaxed matrix take real values.
It can be proven that in the continuous domain
the right part of (13) can be written as
1/2 1/2
()
T
WMtrace
−−
=− YL ZL Y
(14)
Subject to
T
=YY I (15)
where Y is a matrix which is related with the matrix
M
E through the following equation
1/2
M
−
=LYEΛ
(16)
and Λ any
M
M
× matrix. In this paper, we select Λ
to be equal to the identity matrix, Λ=I. Then, the
relaxed indicator matrix
M
E , which is actually the
matrix we are looking for, is calculated as
1/2
M
−
=ELY
(17)
Minimization of the problem (14)-(15) is
obtained through the Ky-Fan theorem (Nakic &
Veselic, 2003). The Ky-Fan theorem states that the
maximum value of the
1/2 1/2
()
T
trace
−−
YL ZL Y
subject to the constraint of
IYY =
T
is equal to the
sum of the
M (M<N) largest eigenvalues of matrix
1/2 1/2−−
LZL
. Consequently,
1/2 1/2
1
max{ ( )}
M
T
i
i
trace
λ
−−
=
=
∑
YL ZL Y
(18)
where
i
λ
refers to the i
th
large eigenvalue of matrix
1/2 1/2−−
LZL
. However, maximization of (18) leads
to minimization of
W in (14). Thus, it is clear that
the
minimum value of W will be
1
min
M
i
i
WM
λ
=
=−
∑
(19)
The Ky-fan Theorem also states that this
minimum value of
W [equation (19)] is obtained
through the matrix
=⋅YRU
(20)
where U is a
MN × matrix the columns of
which are the
eigenvectors of the M largest
eigenvalues of matrix
1/2 1/2−−
LZL
and R an
arbitrarily rotation matrix (i.e., orthogonal with
determinant of one). Again, a simple approach is to
select matrix R as the identity matrix, i.e., R=I, so
=
YU (21)
Finally, we calculate the optimal relaxed
indicator matrix
ˆ
M
E
in the continuous domain as
1/2
ˆ
M
−
=ELU
(22)
3.3 Discrete Approximation
The optimal matrix
ˆ
M
E
of (22) has not the form of
the indicator matrix E since its values are
continuous, while the elements of E [see (13)] are
binary. We recall that binary values are the desired
ones since we have assumed a
non-interruptible,
non-preemptable scheduling policy
. Consequently,
in order to accept the optimal solution of (22) as a
solution for our problem, we have to round the
continuous values of
ˆ
M
E
in a discrete form that
approximate matrix E.
One simple solution, regarding the rounding
process, is to set the maximum value of each row of
matrix
ˆ
M
E
to be equal to 1 and let the remaining
values to be zeros. However, such an approach
yields unsatisfactory performance in case that there
is not any dominant maximum value at every row of
ˆ
M
E
. Furthermore, it handles the rounding process
as
N independent problems, implying that each task
is delegated without regarding the allocation of the
others. An alternative approach, which is adopted in
this paper, is to treat the
N rows of matrix
ˆ
M
E
as M-
dimensional feature vectors. Each one of these
feature vectors indicates the association degree of
each task and the respective
m
th
system’s agent.
More specifically, after we have normalized the
rows of
ˆ
M
E
, we apply the k-means clustering
algorithm, considering the rows of
ˆ
M
E
as the
population to be clustered in
M classes. The k-
means algorithm comprises three phases, the
initialization; the clustering construction; and the
updating phase.
Initialization: In this phase, the algorithm
arbitrarily selects a set of
ˆ
M
E
‘s rows as centers of
the classes that are to be constructed. The number of
selected rows equals
M. That means that each class
will contain the tasks assigned to an agent.
Clustering Construction: In this phase, the
remaining rows of
ˆ
M
E
are clustered to the M
classes using a metric distance. In particular, a row
A JOINT OPTIMIZATION ALGORITHM FOR DISPATCHING TASKS IN AGENT-BASED WORKFLOW
MANAGEMENT SYSTEMS
203

(namely a task) is assigned to a class by comparing
its vector with the class centers and selecting as the
appropriate class, the one with the most proximate
center.
Updating: After the classification, new centers
are created as the means of all vectors belonging to a
class. In case that these centers are different from the
previous ones, a new process takes place and the
algorithm moves on to the clustering construction
phase for further processing. On the contrary, if the
new centers are exactly the same with the previous
ones, meaning that the same task assignment have
been concluded, no further processing is required
and the clustering is terminated.
The performance of the k-means algorithm
highly depends on the initial selection of the class
centers, even though it can be proven that the k-
means always converges to a solution. Thus, the
effectiveness of the dispatching policy is actually
influenced by the selection of the initial matrix rows.
In this paper, to overcome such a drawback and
simultaneously to search for new possible solutions
that will yield, in relatively small time, a satisfactory
approximation of the optimal solution in the discrete
domain, we repeat the experiment by selecting each
time different rows for the initialization, which in
turn, will provide different solutions. Among all
selections, the minimum is returned as the finest
approximation.
4 ALGORITHM EFFICIENCY
We define the task arrival rate λ as the number of
tasks, say
N, requesting for execution within a time
window
T (see Section 2). We shall also notice that
task arrival rate
λ is calculated through the process
arrival rate
λ’. Finally, task arrival rate will be
N
T
λ
= (23)
while the task average duration will be
1
N
i
i
DdN
=
=
∑
(24)
An important aspect which determines
dispatching efficiency is the task granularity
g,
measured as the ratio of the average task duration
D
over the time window
T.
D
g
T
=
(25)
It is expected that as granularity increases,
dispatching performance decreases since more
execution capacity is required. Given a granularity
g
and a rate
λ, the lower bound of available agents
required for achieving the two goals (workload
balancing and QoS) is the
lower bound of available
agents required for achieving zero task overlapping.
This bound is
opt
ND
BNgM
T
==⋅≤
(26)
where
opt
M
refers to the minimum number of
agents required for achieving no task overlapping
under an exhaustive search allocation scenario. It
should be mentioned that
opt
M
cannot be reached in
real life scenarios, since the exhaustive search
algorithm is a NP-hard problem. The lower bound of
(26) is achieved in the extreme case when the tasks
arrive one right after the other, while their durations
cover every gap within the time window
T.
Given the lower bound
B of the agents required
so that no tasks’ overlapping is encountered, we can
define the allocation efficiency as
()
()
B
eS
M
S
=
(27)
where
S refers to the algorithmic strategy adopted to
approximate the exhaustive search policy,
M(S) the
minimum number of agents estimated through the
algorithm
S and e(S) the respective algorithm’s
efficiency. Using equation (26), it is clear that
()
()
opt
M
eS
M
S
≤
(28)
As a result of (26), the lower bound
B does not
take integer values. Since, however,
B expresses the
minimum bound of the required individual agents;
the real values of
B should be rounded to the next
integer so that they are strictly greater than
B, that is
()
()
B
S
M
S
ε
⎡⎤
⎢⎥
=
(29)
where as
⋅
⎡
⎤
⎢
⎥
we indicate the ceil operator and as
()S
ε
the rounded efficiency for the algorithm S.
5 EXPERIMENTAL RESULTS
5.1 A Verifying Scheduling Policy
In order to test our algorithm we apply the following
workflow scenario: A central, manager agent
receives a batch of process instances that demand for
execution. The manager agent has access to the
process definition repository, so it can decompose
the processes into atomic tasks. As described in
ICEIS 2008 - International Conference on Enterprise Information Systems
204
Section 2.1, the manager agent can calculate the
Start Time and Finish Time for every task. It also
maintains a list of available agents. This list can be
dynamically updated, through direct communication
among agents or through brokers as discussed in
section 6. The results of the proposed dispatching
policy are communicated to the agents, who are
committed to execute the assigned tasks.
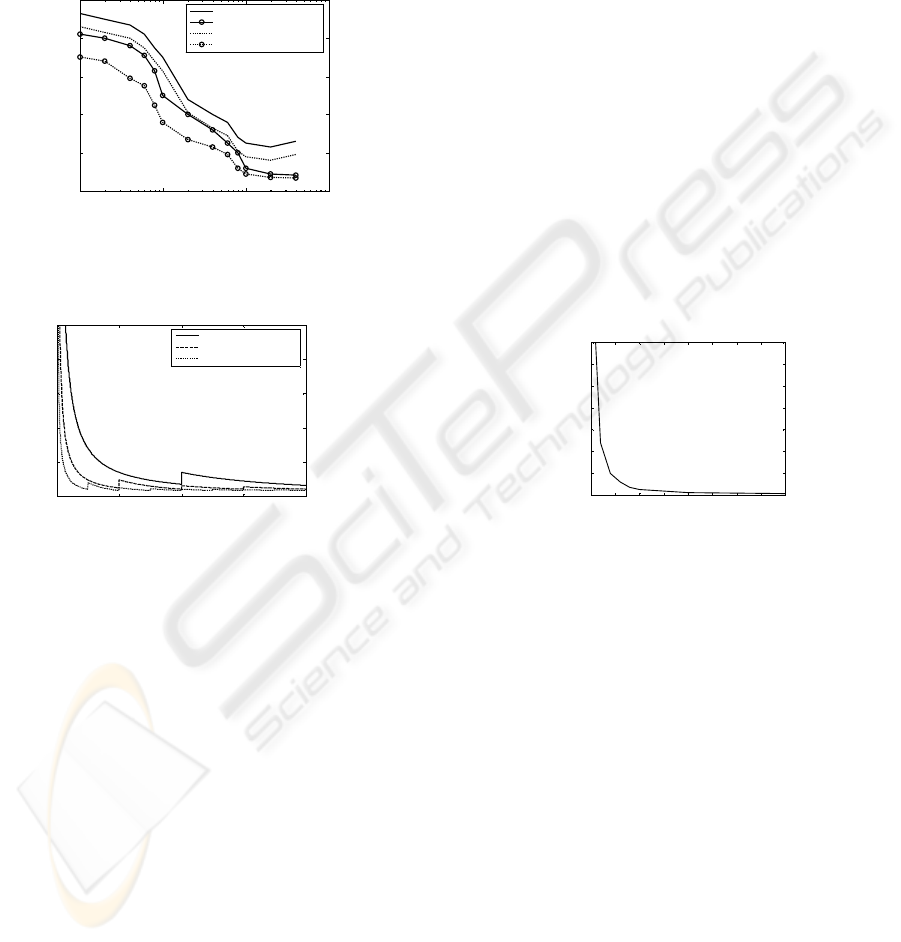
10
-4
10
-3
10
-2
10
-1
0
0.02
0.04
0.06
0.08
0.1
Granularity D/T
Efficiency {it\e}
The Proposed Algoithm at
B
=1
The Greedy Algoithm at
B
=1
The Proposed Algoithm at
B
=2
The Greedy Algoithm at
B
=2
Figure 1: Efficiency versus granularity for different tasks
loads, (B values) for the proposed algorithm and the
greedy one.
0 500 1000 1500 2000
0
0.2
0.4
0.6
0.8
1
Number of Tasks N
Ceil Efficiency
ε
Granularity D/T=0.1%
Granularity D/T=0.2%
Granularity D/T=0.4%
Figure 2: Ceil Efficiency
ε
versus the number of tasks for
different granularity values.
Before starting task execution, every agent
checks its assigned task for dependencies. If there
are any precedence requirements, the agent must
assure that the precedent tasks have indeed been
accomplished. For this reason, we employ a special
field in the agents’ architecture: a check board. A
check board is actually a binary vector whose length
equals the number of tasks assigned to the agent.
Thus, check board elements are either 1 if the agent
has successfully completed the task; or 0 otherwise.
Since agents are notified about the allocation
scheme, they know which agent is in charge of the
precedents task, so they can directly query it. In
case, that a task has one or more precedents, it can
not be started, unless all the precedents are
accomplished.
In case of a task failure, the agent not only put a
zero in the corresponding place at its check board,
but it also informs the manager agent. The latter,
cancels all the tasks that belong to the same instance
and logs the process failure. This instance has to be
assigned again during the next dispatching
procedure. However, exception handling is a major
issue that needs to be addressed more efficiently, yet
it is out of the scope of this paper.
5.2 Experimental Setup
A process definition generator is created to provide
us with simulation data. Every generated definition
comprises a random number of activities, split into
four blocks: A sequence, a parallel block, an OR
gateway and a sequence again. Process instances and
activities duration times are also randomly
generated. We compare our approach with a
greedy
one, which selects a locally optimum choice for
every task. In particular, the
greedy algorithm
assigns each task to an agent so that no task
overlapping is encountered, by exploiting the current
local load of each agent. If all agents are loaded with
tasks, then the pending tasks undergo violation of
their QoS requirements.
0 0.5 1 1. 5 2 2. 5 3 3.5 4
0
10
20
30
40
50
60
70
Granularity (%)
Gain ( N/M)
Figure 3: Gain defined as the ratio of N/M versus
granularity.
5.3 Simulation Results
Figure 1 shows the efficiency measure e versus the
variation of the granularity value
D/T [see(27)] for
two algorithmic strategies: the proposed one and the
greedy approach. As is observed, the efficiency
increases as granularity decreases, meaning that for
tasks of relatively short duration compared to the
window time better allocation can be achieved in
accordance to the tasks’ load. However, the
improvement is saturated for low values of
granularity. Similarly, we observe a reduction of the
efficiency
e as B increases for the same granularity
(i.e., an increase in tasks’ load), meaning that more
agents are required for task execution to achieve no
overlapping. In this Figure, we compare the results
derived by the proposed algorithm, with the ones
stem from the greedy scheduling approach. For all
values, the proposed scheme outperforms the greedy
approach, meaning that less agents are required to
A JOINT OPTIMIZATION ALGORITHM FOR DISPATCHING TASKS IN AGENT-BASED WORKFLOW
MANAGEMENT SYSTEMS
205

efficiently schedule the same number of workflows
using the proposed scheme than the greedy one.
Figure 2 shows the discrete efficiency value
denoted as
ε
in (29) versus the number of tasks.
The efficiency decreases, however, peaks are
presented with a periodic order stemming from
round function in (29).
Finally, the gain, defined as the ratio of the
number of tasks over the minimum number of agents
required for achieving no overlapping versus
granularity is shown in Figure 3. It is clear that, the
gain is exponentially increases for low values of
granularity, instead of the high ones.
6 DISCUSSION
In this paper we propose a scheduling-oriented task
dispatching policy. The application context of the
suggested algorithm is WfMS where agents operate.
A major assumption that guided our approach is that
all agents are capable of executing all tasks (see
section 2.1). Apparently, this is not always the real
situation. To overcome this limitation, we may
integrate into the dispatching procedure a
negotiation step. During that step the manager agent
may call for bids and agents that fulfill the capacity
requirements may answer. Then the manager agent
can decide the allocation plan based on the available
agents. Another way is to incorporate broker agents.
Broker agents know the capacities of their teams, so
they could be in charge for the negotiation process.
Alternatively, the manager agent could dispatch
tasks to brokers, considering them as similar entities,
who in turn, will allocate their tasks to their agents.
Concluding, as simulations results demonstrate,
the task dispatching policy that we propose can
efficiently optimize both system’s performance and
user’s QoS requirements. Adopting optimization
criteria based on measures of task overlapping, we
approximate an NP-complete problem with an
algorithm of polynomial order. The results of our
algorithm can feed the workflow engines of a WfMS
system and allow them an adequate task allocation.
ACKNOWLEDGEMENTS
This work is supported by 03ED375 PENED
project, co-financed by 75% from E.U and 25%
from GRST.
REFERENCES
Aye, T., & Tun, K. M. L. (2005). A Collaborative Mobile
Agent-based Workflow System. Paper presented at the
6th Asia-Pacific Symposium on Information and
Telecommunication Technologies, 2005. APSITT
2005 Yangon, Myanmar.
Cao, J., Wang, J., Zhang, S., & Li, M. (2004). A
dynamically reconfigurable system based on workflow
and service agents. Engineering Applications of
Artificial Intelligence, 17(7), 771-782.
Debenham, J. (2002). Who does what in a multiagent
system for emergent process management. Paper
presented at the Ninth Annual IEEE International
Conference and Workshop on the Engineering of
Computer-Based Systems (ECBS' 02), Lund, Sweden.
Jennings, N. R., Norman, T. J., Faratin, P., O'Brien, P., &
Odgers, B. (2000). Autonomous Agents For Business
Process Management. Applied Artificial Intelligence,
14(2), 145-189.
Madhusudan, T. (2005). An agent-based approach for
coordinating product design workflows. Computers in
Industry, 56(3), 235-259.
Manmin, X., & Huaicheng, L. (1999). Cooperative
software agents for workflow management system.
Paper presented at the Fifth Asia-Pacific Conference
On Communications and Fourth Optoelectronics and
Communications Conference APCC/OECC '99,
Beijing, China.
Nakic, I., & Veselic, K. (2003). Wielandt and Ky-Fan
Theorem for Matrix Pairs. Linear Algebra and its
Applications, 369(17), 77-73.
O'Brien, P. D., & Wiegand, M. E. (1998). Agent based
process management: applying intelligent agents to
workflow. The Knowledge Engineering Review, 13(2),
161-174.
Qiu, J., Wang, C., & He, Y. (2005). Research on
application of intelligent agents in the workflow
management system. Paper presented at the 2005 IEEE
Networking, Sensing and Control, ICNSC2005,
Tucson, Arizona, USA.
Shepherdson, J. W., Thompson, S. G., & Odgers, B. R.
(1999). Decentralised Workflows and Software
Agents. BT Technology Journal, 17(4), 65-71.
Workflow Management Coalition. (1999). Terminology &
Glossary (WfMC Specification documents No.
WFMC-TC-1011).
Xu, Q., Qiu, R., & Xu, F. (2003, 5-8 Oct. 2003). Agent-
based workflow approach to the design and
development of cross-enterprise information systems.
Paper presented at the IEEE International Conference
on Systems, Man and Cybernetics, 2003. ,
Washington, D.C., USA.
Zur Muehlen, M. (2004). Organizational Management in
Workflow Applications – Issues and Perspectives.
Information Technology and Management, 5(3), 271-
291.
ICEIS 2008 - International Conference on Enterprise Information Systems
206
