
SORCER: COMPUTING AND METACOMPUTING INTERGRID
Michael Soblewski
Texas Tech University, Lubbock, TX, U.S.A.
Keywords: Metacomputing, metaprogramming, grid computing, service-oriented architectures, service-oriented
programming.
Abstract: This paper investigates grid computing from the point of view three basic computing platforms. Each
platform considered consists of virtual compute resources, a programming environment allowing for the
development of grid applications, and a grid operating system to execute user programs and to make solving
complex user problems easier. Three platforms are discussed: compute grid, metacompute grid and
intergrid. Service protocol-oriented architectures are contrasted with service object-oriented architectures,
then the current SORCER metacompute grid based on a service object-oriented architecture and a new
metacomputing paradigm is described and analyzed. Finally, we explain how SORCER, with its core
services and federated file system, can also be used as a traditional compute grid and an intergrid—a hybrid
of compute and metacompute grids.
1 INTRODUCTION
The term “grid computing” originated in the early
1990s as a metaphor for accessing computer power
as easy as an electric power grid. Today there are
many definitions of grid computing with a varying
focus on architectures, resource management,
access, virtualization, provisioning, and sharing
between heterogeneous compute domains. Thus,
diverse compute resources across different
administrative domains form a grid for the shared
and coordinated use of resources in dynamic,
distributed, and virtual computing organizations
(Foster, 2002). Therefore, the grid requires a
platform that describes some sort of framework to
allow software to run utilizing virtual organizations.
These organizations are dynamic subsets of
departmental grids, enterprise grids, and global
grids, which allow programs to use shared
resources—collaborative federations.
Different platforms of grids can be distinguished
along with corresponding types of virtual
federations. However, in order to make any grid-
based computing possible, computational modules
have to be defined in terms of platform data,
operations, and relevant control strategies. For a grid
program, the control strategy is a plan for achieving
the desired results by applying the platform
operations to the data in the required sequence,
leveraging the dynamically federating resources.
We can distinguish three generic grid platforms,
which are described below.
Programmers use abstractions all the time. The
source code written in programming language is an
abstraction of the machine language. From machine
language to object-oriented programming, layers of
abstractions have accumulated like geological strata.
Every generation of programmers uses its era’s
programming languages and tools to build programs
of next generation. Each programming language
reflects a relevant abstraction, and usually the type
and quality of the abstraction implies the complexity
of problems we are able to solve. For example, a
procedural language provides an abstraction of an
underlying machine language. An executable file
represents a computing component whose content is
meant to be interpreted as a program by the
underlying native processor. A request can be
submitted to a grid resource broker to execute a
machine code in a particular way, e.g., parallelizing
it and collocating it dynamically to the right
processors in the grid. That can be done, for
example, with the Nimrod-G grid resource broker
scheduler (“Nimrod”, 2008) or the Condor-G high-
throughput scheduler (Thain, 2003). Both rely on
Globus/GRAM (Grid Resource Allocation and
Management) protocol (Foster, 2002). In this type of
grid, called a compute grid, executable files are
moved around the grid to form virtual federations of
74
Soblewski M. (2008).
SORCER: COMPUTING AND METACOMPUTING INTERGRID.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - ISAS, pages 74-85
DOI: 10.5220/0001690700740085
Copyright
c
SciTePress
required processors. This approach is reminiscent of
batch processing in the era when operating systems
were not yet developed. A series of programs
("jobs") is executed on a computer without human
interaction or the possibility to view any results
before the execution is complete.
A grid programming language is the abstraction
of hierarchically organized networked processors
running a grid computing program—metaprogram—
that makes decisions about component programs
such as when and how to run them. Nowadays the
same computing abstraction is usually applied to the
program executing on a single computer as to the
metaprogram executing in the grid of computers,
even though the executing environments are
structurally completely different entities. Most grid
programs are still written using compiled languages
such as FORTRAN, C, C++, Java, and scripting
languages such as Perl and Python the way it usually
works on a single host. The current trend is to have
these programs and scripts define grid computational
modules. Thus, most grid computing modules are
developed using the same abstractions and, in
principle, run the same way on the grid as on a
single processor. There is presently no grid
programming methodologies to deploy a
metaprogram that will dynamically federate all
needed resources in the grid according to a control
strategy using a kind of grid algorithmic logic.
Applying the same programming abstractions to the
grid as to a single computer does not foster
transitioning from the current phase of early grid
adopters to public recognition and then to mass
adoption phases.
The reality at present is that grid resources are
still very difficult for most users to access, and that
detailed programming must be carried out by the
user through command line and script execution to
carefully tailor jobs on each end to the resources on
which they will run or for the data structure that they
will access. This produces frustration on the part of
the user, delays in adoption of grid techniques, and a
multiplicity of specialized “grid-aware” tools that
are not, in fact, aware of each other that defeat the
basic purpose of the grid.
Instead of moving executable files around the
grid, we can autonomically provision the
corresponding computational components as
uniform services on the grid. All grid services can be
interpreted as instructions (metainstructions) of the
metacompute grid. Now we can submit a
metaprogram in terms of metainstructions to the grid
platform that manages a dynamic federation of
service providers and related resources, and enables
the metaprogram to interact with the service
providers according to the metaprogram control
strategy.
We can distinguish three types of grids
depending on the nature of computational
components: compute grids (cGrids), metacompute
grids (mcGrids), and the hybrid of the previous
two—intergrids (iGrids). Note that a cGrid is a
virtual federation of processors (roughly CPUs) that
execute submitted executable files with the help of a
grid resource broker. However, an mcGrid is a
federation of service providers managed by the
mcGrid operating system. Thus, the latter approach
requires a metaprogramming methodology while in
the former case the conventional procedural
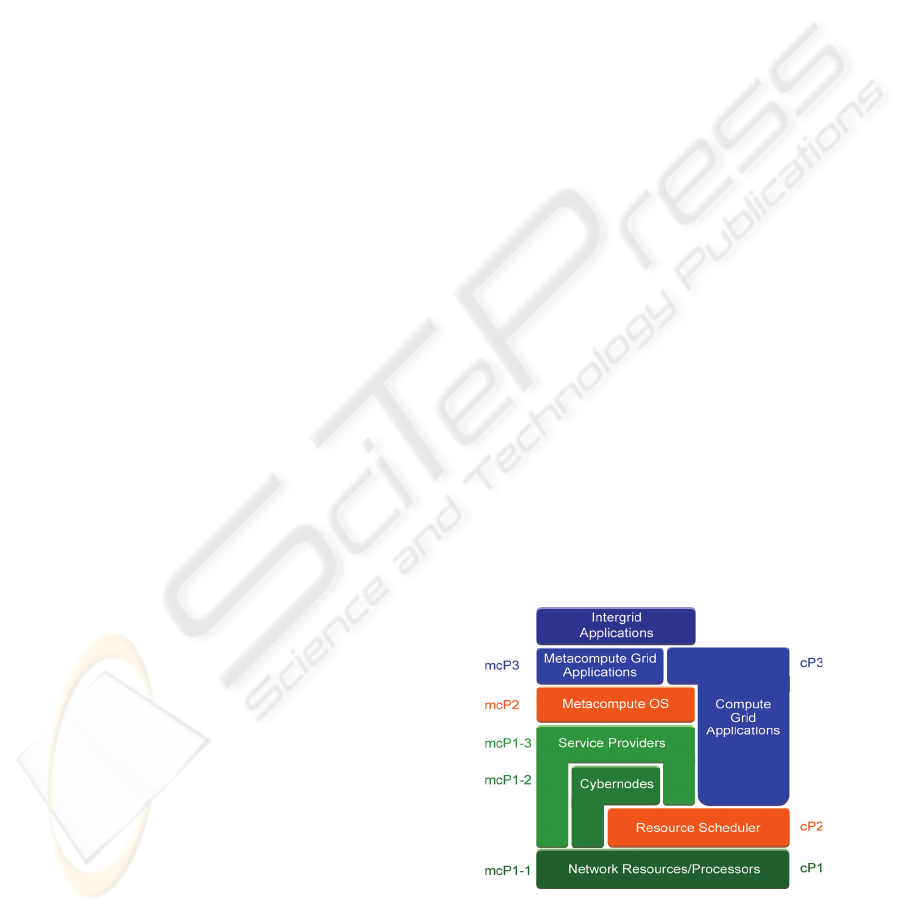
programming languages are used. The hybrid of
both cGrid and mcGrid abstractions allows for an
iGrid to execute both programs and metaprograms
(intergrid applications) as depicted in Figure 1,
where platform layers P1, P2, and P3 correspond to
resources, resource management, and programming
environment correspondingly.
One of the first mcGrids was developed under
the sponsorship of the National Institute for
Standards and Technology (NIST)—the Federated
Intelligent Product Environment (FIPER) (“FIPER”,
2008; Röhl, 2000; Sobolewski 2002). The goal of
FIPER is to form a federation of distributed services
that provide engineering data, applications and tools
on a network. A highly flexible software architecture
had been developed (1999-2003), in which
engineering tools like computer-aided design
(CAD), computer-aided engineering (CAE), product
data management (PDM) optimization, cost
modeling, etc., act as federating service providers
and service requestors.
Figure 1: Three types of grids: compute grid,
metacompute grid, and intergrid. A cybernode provides a
lightweight dynamic virtual processor, turning
heterogeneous compute resources into homogeneous
services available to the metacomputing OS (“Project
Rio”, n.d).
SORCER: COMPUTING AND METACOMPUTING INTERGRID
75
The Service-ORiented Computing EnviRonment
(SORCER) (Sobolewski, 2007; Sobolewski, 2008)
builds on the top of FIPER to introduce a
metacomputing operating system with all basic
services necessary, including a federated file system,
to support service-oriented metaprogramming. It
provides an integrated solution for complex
metacomputing applications. The SORCER
metacomputing environment adds an entirely new
layer of abstraction to the practice of grid
computing—exertion-oriented (EO) programming.
The EO programming makes a positive difference in
service-oriented programming primarily through a
new metaprogramming abstraction as experienced in
many grid-computing projects including systems
deployed at GE Global Research Center, GE
Aviation, Air Force Research Lab, and SORCER
Lab (Burton, 2002; Kolonay, 2002; Sampath, 2002;
Kao, 2003; Lapinski, 2003; Khurana, 2005;
Sobolewski, 2006; Berger, 2007; Turner, 2007;
Goel, 2005; Goel, 2007; Kolonay, 2007; “SORCER
Research”, 2008).
The paper is organized as follows. Section 2
provides a brief description of two service-oriented
architectures used in grid computing with a related
discussion of distribution transparency; Section 3
describes the SORCER metacomputing philosophy
and mcGrid; Section 4 describes the SORCER
cGrid, Section 5 the metacomputing file system, and
Section 6 the SORCER iGrid; Section 7 provides
concluding remarks.
2 SOA = SPOA+SOOA
Various definitions of a Service-Oriented
Architecture (SOA) leave a lot of room for
interpretation. Nowadays SOA becomes the leading
architectural approach to most grid developments. In
general terms, SOA is a software architecture using
loosely coupled software services that integrates
them into a distributed computing system by means
of service-oriented programming. Service providers
in the SOA environment are made available as
independent service components that can be
accessed without a priori knowledge of their
underlying platform or implementation. While the
client-server architecture separates a client from a
server, SOA introduces a third component, a service
registry. In SOA, the client is referred to as a service
requestor and the server as a service provider. The
provider is responsible for deploying a service on
the network, publishing its service to one or more
registries, and allowing requestors to bind and
execute the service. Providers advertise their
availability on the network; registries intercept these
announcements and add published services. The
requestor looks up a service by sending queries to
registries and making selections from the available
services. Queries generally contain search criteria
related to the service name/type and quality of
service. Registries facilitate searching by storing the
service representation and making it available to
requestors. Requestors and providers can use
discovery and join protocols to locate registries and
then publish or acquire services on the network.
We can distinguish the service object-oriented
architecture (SOOA), where providers, requestors,
and proxies are network objects, from the service
protocol oriented architecture (SPOA), where a
communication protocol is fixed and known
beforehand by the both provider and requestor.
Using SPOA, a requestor can use this fixed protocol
and a service description obtained from a service
registry to create a proxy for binding to the service
provider and for remote communication over the
fixed protocol. In SPOA a service is usually
identified by a name. If a service provider registers
its service description by name, the requestors have
to know the name of the service beforehand.
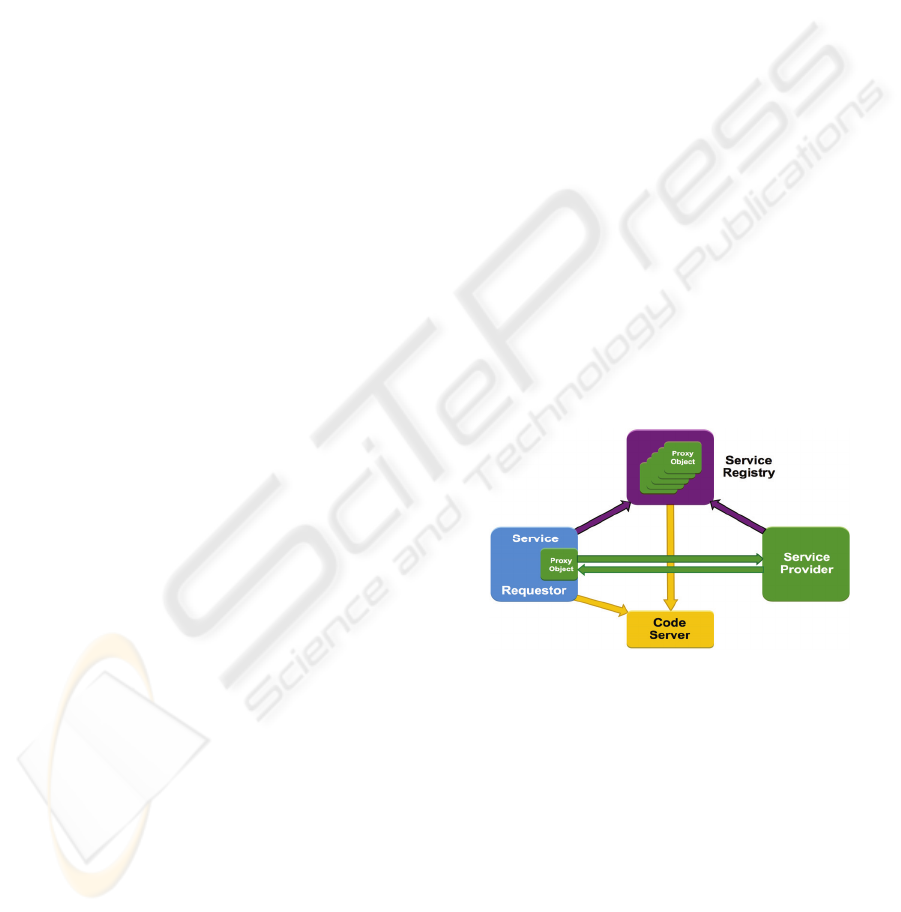
Figure 2: Service object-oriented architecture.
In SOOA (see Figure 2), a proxy—an object
implementing the same service interfaces as its
service provider—is registered with the registries
and it is always ready for use by requestors. Thus,
the service provider publishes the proxy as the active
surrogate object with a codebase annotation, e.g.,
URLs to the code defining proxy behavior in Jini
ERI (“Package net.jini.jeri”, n.d.). In SPOA, by
contrast, a passive service description is registered
(e.g., an XML document in WSDL for Web/OGSA
services (McGovern, 2003; Sotomayor, 2005) or an
interface description in IDL for CORBA (Ruth,
1999)); the requestor then has to generate the proxy
ICEIS 2008 - International Conference on Enterprise Information Systems
76

(a stub forwarding calls to a provider) based on the
service description and the fixed communication
protocol (e.g., SOAP in Web/OGSA services, IIOP
in CORBA). This is referred to as a bind operation.
The binding operation is not needed in SOOA since
the requestor holds the active surrogate object
obtained from the registry.
Web services and OGSA services cannot change
the communication protocol between requestors and
providers while the SOOA approach is protocol
neutral (Waldo, n.d.). In SOOA, the way an object
proxy communicates with a provider is established
by the contract between the provider and its
published proxy and defined by the provider
implementation. The proxy’s requestor does not
need to know who implements the interface, how it
is implemented, or where the provider is located—
three neutralities of SOOA. So-called smart proxies
(e.g., provided by Jini ERI) grant access to local and
remote resources. They can also communicate with
multiple providers on the network regardless of who
originally registered the proxy, thus separate
providers on the network can implement different
parts of the smart proxy interface(s).
Communication protocols may also vary, and a
single smart proxy can also talk over multiple
protocols including application specific protocols.
SPOA and SOOA differ in their method of
discovering the service registry. SORCER uses
dynamic discovery protocols to locate available
registries (lookup services) as defined in the Jini
architecture (“Jini Architecture”, 2001). Neither the
requestor who is looking up a proxy by its interfaces
nor the provider registering a proxy needs to know
specific registry locations. In SPOA, however, the
requestor and provider usually do need to know the
explicit location of the service registry—e.g., a URL
for RMI registry (Pitt, 2001), a URL for UDDI
registry (McGovern, 2003), an IP address and port
of a COS Name Server (Ruh, 1999)—to open a
static connection and find or register a service. In
deployment of Web and OGSA services, a UDDI
registry is sometimes even omitted; in SOOA,
lookup services are mandatory due to the dynamic
nature of objects identified by service types.
Interactions in SPOA are more like static client-
server connections (e.g., HTTP, SOAP, IIOP) in
many cases with no need to use service registries at
all.
Crucial to the success of SOOA is interface
standardization. Services are identified by interfaces
(service types, e.g., Java interfaces) and additional
provider’s specific properties if needed; the exact
identity of the service provider is not crucial to the
architecture. As long as services adhere to a given
set of rules (common interfaces), they can
collaborate to execute published operations,
provided the requestor is authorized to do so.
Let us emphasize the major distinction between
SOOA and SPOA: in SOOA, a proxy is created and
always owned by the service provider, but in SPOA,
the requestor creates and owns a proxy which has to
meet the requirements of the protocol that the
provider and requestor agreed upon a priori. Thus, in
SPOA the protocol is always a generic one, reduced
to a common denominator—one size fits all—that
leads to inefficient network communication in many
cases. In SOOA, each provider can decide on the
most efficient protocol(s) needed for a particular
distributed application.
Service providers in SOOA can be considered as
independent network objects finding each other via a
service registry using object types and
communicating through message passing. A
collection of these object sending and receiving
messages—the only way these objects communicate
with one another—looks very much like a service
object-oriented distributed system.
Do you remember the eight fallacies (“Fallacies”,
n.d.) of network computing? We cannot just take an
object-oriented program developed without
distribution in mind and make it a distributed
system, ignoring the unpredictable network
behavior. Most RPC systems, with notable exception
of Jini (Edwards, 2000) and SORCER, hide the
network behavior and try to transform local
communication into remote communication by
creating distribution transparency based on a local
assumption of what the network might be. However,
every single distributed object cannot do that in a
uniform way as the network is a dynamic distributed
system and cannot be represented completely within
a single entity.
The network is dynamic, cannot be constant, and
introduces latency for remote invocations. Network
latency also depends on potential failure handling
and recovery mechanisms, so we cannot assume that
a local invocation is similar to remote invocation.
Thus, complete distribution transparency—by
making calls on distributed objects as though they
were local—is impossible to achieve in practice. The
distribution is simply not just an object-oriented
implementation of a single distributed object; it is a
metasystemic issue in object-oriented distributed
SORCER: COMPUTING AND METACOMPUTING INTERGRID
77

programming. In that context, Web/OGSA services
define distributed objects, but do not have anything
common with object-oriented distributed systems
that for example the Jini architecture emphasizes.
Object-oriented programming can be seen as an
attempt to abstract both data and related operations
in an entity called object. Thus, object-oriented
program may be seen as a collection of cooperating
objects communicating via message passing, as
opposed to a traditional view in which a program
may be seen as a list of instructions to the computer.
Instead of objects and messages, in EO
programming service providers and exertions
constitute a program. An exertion is a kind of meta-
request sent onto the network. The exertion can be
considered as the specification of collaboration that
encapsulates data, related operations, and control
strategy. The operations specify implicitly the
required service providers on the network. The
activated exertion creates at runtime a federation of
providers to execute a service collaboration
according to the exertion’s control strategy. Thus,
the exertion is the metaprogram and its metashell
that submits the request onto the network to run the
collaboration in which all providers pass to one
other the component exertions only. This type of
metashell was created for the SORCER
metacompute operating system (see Figure 3)—the
exemplification of SOOA with autonomic
management of system and domain-specific service
providers to run EO programs.
SORCER defines the object-oriented distribution
for EO programming (Sobolewski, 2008). It uses
indirect federated remote method invocation
(Sobolewski, 2007) with no location of service
provider explicitly specified in exertions. A
specialized infrastructure of distributed services
supports discovery/join protocols for providers and
the exertion shell, federated file system, and the
system brokers responsible for coordination of
executing federations. That infrastructure defines
SORCER’s object-oriented distributed modularity,
extensibility, and reuse of providers and exertions—
key features of object-oriented distributed
programming that are usually missing in SPOA
programming environments.
Figure 3: SORCER layered platform, where P1 resources,
P2 resource management, P3 programming environment.
3 METACOMPUTE GRID
SORCER is a federated service-to-service (S2S)
metacomputing environment that treats service
providers as network peers with well-defined
semantics of a federated service object-oriented
architecture (FSOOA). It is based on Jini semantics
of services (“Jini Architecture”, n.d.) in the network
and the Jini programming model (Edwards, 2000)
with explicit leases, distributed events, transactions,
and discovery/join protocols. While Jini focuses on
service management in a networked environment,
SORCER is focused on EO programming and the
execution environment for exertions.
As described in Section 2, SOOA consists of four
major types of network objects: providers,
requestors, registries, and proxies. The provider is
responsible for deploying the service on the
network, publishing its proxy to one or more
registries, and allowing requestors to access its
proxy. Providers advertise their availability on the
network; registries intercept these announcements
and cache proxy objects to the provider services.
The requestor looks up proxies by sending queries to
registries and making selections from the available
service types. Queries generally contain search
criteria related to the type and quality of service.
Registries facilitate searching by storing proxy
objects of services and making them available to
requestors. Providers use discovery/join protocols to
publish services on the network; requestors use
discovery/join protocols to obtain service proxies on
the network. The SORCER metacompute OS uses
Jini discovery/join protocols to implement its
FSOOA.
ICEIS 2008 - International Conference on Enterprise Information Systems
78

In FSOOA, a service provider is an object that
accepts exertions from service requestors to execute
a collaboration. An exertion encapsulates service
data, operations, and control strategy. A task
exertion is an elementary service request, a kind of
elementary remote instruction (elementary
statement) executed by a single service provider or a
small-scale federation. A composite exertion called a
job exertion is defined hierarchically in terms of
tasks and other jobs, including control flow
exertions. A job exertion is a kind of network
procedure executed by a large-scale federation.
Thus, the executing exertion is a service-oriented
program that is dynamically bound to all required
and currently available service providers on the
network. This collection of providers identified at
runtime is called an exertion federation. While this
sounds similar to the object-oriented paradigm, it
really is not. In the object-oriented paradigm, the
object space is a program itself; here the exertion
federation is the execution environment for the
exertion, and the exertion is the object-oriented
program—specification of service collaboration.
This changes the programming paradigm
completely. In the former case the object space is
hosted by a single computer, but in the latter case the
parent and its component exertions along with
related service providers are hosted by the network
of computers.
The overlay network of all service providers is
called the service grid and an exertion federation is
called a virtual metacomputer. The metainstruction
set of the metacomputer consists of all operations
offered by all providers in the grid. Thus, a service-
oriented program is composed of metainstructions
with its own service-oriented control strategy and
service context representing the metaprogram data.
Service signatures specify metainstructions in
SORCER. Each signature primarily is defined by a
service type (interface name), operation in that
interface, and a set of optional attributes. Four types
of signatures are distinguished:
PROCESS,
PREPROCESS, POSTPROCESS, and APPEND. A
PROCESS signature—of which there is only one
allowed per exertion—defines the dynamic late
binding to a provider that implements the signature’s
interface. The service context (Zhao, 2001;
Sobolewski, 2008) describes the data that tasks and
jobs work on. An
APPEND signature defines the
context received from the provider specified by this
signature. The received context is then appended in
runtime to the service context later processed by
PREPROCESS, PROCESS, and POSTPROCESS
operations of the exertion. Appending a service
context allows a requestor to use actual network data
in runtime not available to the requestor when the
exertion is submitted. An EO program allows for a
dynamic federation to transparently coordinate the
execution of all component exertions within the grid.
Please note that these metacomputing concepts are
defined differently in traditional grid computing
where a job is just an executing process for a
submitted executable code with no federation being
formed for the executable.
An exertion can be activated by calling exertion’s
exert operation:
Exertion.exert(Transaction):Exertion,
where a parameter of the
Transaction type is
required when a transactional semantics is needed
for all participating nested exertions within the
parent one. Thus, EO programming allows us to
submit an exertion onto the network and to perform
executions of exertion’s signatures on various
service providers indirectly, but where does the
service-to-service communication come into play?
How do these services communicate with one
another if they are all different? Top-level
communication between services, or the sending of
service requests, is done through the use of the
generic
Servicer interface and the operation
service that all SORCER services are required to
provide:
Servicer.service(Exertion,
Transaction):Exertion
. This top-level service
operation takes an exertion as an argument and gives
back an exertion as the return value.
So why are exertions used rather than directly
calling on a provider's method and passing service
contexts? There are two basic answers to this. First,
passing exertions helps to aid with the network-
centric messaging. A service requestor can send an
exertion implicitly out onto the network—
Exertion.exert()—and any service provider can
pick it up. The provider can then look at the
interface and operation requested within the
exertion, and if it doesn't implement the desired
interface or provide the desired method, it can
continue forwarding it to another service provider
who can service it. Second, passing exertions helps
with fault detection and recovery. Each exertion has
its own completion state associated with it to specify
if it has yet to run, has already completed, or has
failed. Since full exertions are both passed and
returned, the user can view the failed exertion to see
what method was being called as well as what was
SORCER: COMPUTING AND METACOMPUTING INTERGRID
79

used in the service context input nodes that may
have caused the problem. Since exertions provide all
the information needed to execute a task including
its control strategy, a user would be able to pause a
job between tasks, analyze it and make needed
updates. To figure out where to resume an exertion,
the executing provider would simply have to look at
the exertion’s completion states and resume the first
one that wasn't completed yet. In other words, EO
programming allows the user, not programmer to
update the metaprogram on-the-fly, what practically
translates into creation new collaborative
applications during the exertion runtime.
Despite the fact that every
Servicer can accept
any exertion,
Servicers have well defined roles in
the S2S platform (see Figure 3):
a)
Taskers – process service tasks
b)
Jobbers – process service jobs
c)
Spacers – process tasks and jobs via exertion
space for space-based computing (Freeman,
1999)
d)
Contexters – provide service contexts for
APPEND Signatures
e)
FileStorers – provide access to federated file
system providers (Sobolewski, 2003, Berger,
2005, Berger 2007)
f)
Catalogers – Servicer registries
g)
Persisters – persist service contexts, tasks,
and jobs to be reused for interactive EO
programming
h)
Relayers – gateway providers; transform
exertions to native representation, for example
integration with Web services and JXTA
(“JXTA”, n.d.)
i)
Autenticators, Authorizers, Policers,
KeyStorers – provide support for service
security
j)
Auditors, Reporters, Loggers – support for
accountability, reporting, and logging
k)
Griders, Callers, Methoders – support
compute grid (see Section 4)
l) Generic
ServiceTasker, ServiceJobber, and
ServiceSpacer
implementations are used to
configure domain-specific providers via
dependency injection—configuration files for
smart proxying and embedding business objects,
called service beans, into service providers.
An exertion can be created interactively
(Sobolewski, 2006) or programmatically (using
SORCER APIs), and its execution can be monitored
and debugged (Soorianarayanan, 2006) in the
overlay service network via service user interfaces
(“The Service UI Project”, n.d.) attached to
providers and installed on-the-fly by generic service
browsers (“Inca X”, n.d). Service providers do not
have mutual associations prior to the execution of an
exertion; they come together dynamically (federate)
for all nested tasks and jobs in the exertion. Domain
specific providers within the federation, or task
peers, execute service tasks. Jobs are coordinated by
rendezvous peers: a Jobber or Spacer, two of the
SORCER platform core services. However, a job
can be sent to any peer. A peer that is not a
rendezvous peer is responsible for forwarding the
job to an available rendezvous peer and returning
results to the requestor. Thus implicitly, any peer
can handle any exertion type. Once the exertion
execution is complete, the federation dissolves and
the providers disperse to seek other exertions to join.
An
Exertion is activated by calling its exert
method. The SORCER API defines the following
three related operations:
1.
Exertion.exert(Transaction):Exertion
– join the federation; the activated exertion binds
to an available provider specified by the
exertion’s
PROCESS signature;
2.
Servicer.service(Exertion,
Transaction):Exertion
– request a service
in the federation initiated by any bounding
provider; and
3.
Exerter.exert(Exertion,
Transaction):Exertion – execute the
argument exertion by the provider accepting the
service request in 2) above.
This above Triple Command pattern (Sobolewski,
2007) defines various implementations of these
interfaces:
Exertion (metaprogram), Servicer
(generic peer provider), and Exerter (service
provider exerting a particular type of
Exertion).
This approach allows for the P2P environment
(Oram, 2001) via the
Servicer interface, extensive
modularization of
Exertions and Exerters, and
extensibility from the triple design pattern so
requestors can submit onto the network any EO
programs they want with or without transactional
semantics. The Triple Command pattern is used as
follows:
1. An exertion can be activated by calling
Exertion.exert(). The exert operation
implemented in
ServiceExertion uses
ServiceAccessor to locate in runtime the
ICEIS 2008 - International Conference on Enterprise Information Systems
80

provider matching the exertion’s
PROCESS
signature.
2. If the matching provider is found, then on its
access proxy the
Servicer.service() method
is invoked.
3. When the requestor is authenticated and
authorized by the provider to invoke the method
defined by the exertion’s PROCESS signature,
then the provider calls its own
exert operation:
Exerter.exert().
4.
Exerter.exert() operation is implemented
by
ServiceTasker, ServiceJobber, or
ServiceSpacer
. The ServiceTasker peer
calls by reflection the application method
specified in the
PROCESS signature of the task
exertion. All application domain methods of any
interface have the same signature: a single
Context type parameter and a Context type
return vale. Thus an application interface looks
like an RMI (Pitt, 2001) interface with the above
simplification on the common signature for all
interface methods.
The exertion activated by a service requestor can be
submitted directly or indirectly to the matching
service provider. In the direct approach, when
signature’s access type is
PUSH, the exertion’s
ServicerAccessor finds the matching service
provider against the service type and attributes of the
PROCESS signature and submits the exertion to the
matching provider. Alternatively, when signature’s
access type is
PULL, a ServiceAccessor can use a
Spacer provider and simply drops the exertion into
the shared exertion space to be pulled by a matching
provider. The execution order of signatures is
defined by signature priorities, if the exertion’s flow
type is
SEQUENTIAL, otherwise they are dispatch in
parallel. In Figure 4 four use cases are presented to
illustrate push vs. pull exertion processing with
either
PUSH or PULL access types. We assume here
that an exertion is a job with two component
exertions executed in parallel (sequence numbers
with a and b), i.e., the job’s signature flow type is
PARALLEL. The job can be submitted directly to
either
Jobber (use cases: 1—access is PUSH, and
2—access is
PULL) or Spacer (use cases: 3 —
access is
PUSH, and 4—access is PULL) depending
on the interface defined in its
PROCES signature.
Figure 4: Push vs. pull exertion processing.
Thus, in cases 1 and 2 the signature’s interface is
Jobber and in cases 3 and 4 the signature’s
interface is
Spacer as shown in Figure 2.
The exertion’s
ServicerAccessor delivers the
right service proxy dynamically, either for a
Jobber
or
Spacer. If the access type of the parent exertion
is
PUSH, then all the component exertions are
directly passed to servicers matching their
PROCESS
signatures (case 1 and 3), otherwise they are written
into the exertion space by a
Spacer (case 2 and 4).
In the both cases 2 and 4, the component exertions
are pulled from the exertion space by servicers
matching their signatures as soon as they are
available. Thus,
Spacers provide efficient load
balancing for processing the exertion space. The
fastest available sevicer gets an exertion from the
space before other overloaded or slower servicers
can do so. When an exertion consists of component
jobs with different access and flow types, then we
have a hybrid case when the collaboration
potentially executes concurrently with multiple pull
and push subcollaborations at the same time.
4 COMPUTE GRID
Also, to use legacy applications, SORCER supports
a traditional approach to grid computing similar to
those found in Condor (Thain, 2003) and Globus
(Sotomayor, 2005). Here, instead of exertions being
executed by services providing business logic for
collaborating exertions, the business logic comes
from the service requestor's executable codes that
seek compute resources on the network.
The cGrid services in the SORCER environment
include
Griders accepting exertions and
collaborating with
Jobbers and Spacers in the role
of grid scheduler.
Caller and Methoder services
are used for task execution received from
Jobbers
or picked up from exertion space via
Spacers.
Callers execute provided codes via a system call as
SORCER: COMPUTING AND METACOMPUTING INTERGRID
81

described by the standardized
Caller’s service
context of the submitted task.
Methoders download
required Java code (task method) from requestors to
process any submitted service context with the
downloaded code accordingly. In either case, the
business logic comes from requestors; it is
executable code specified in the service context
invoked by
Callers, or mobile Java code executed
by
Methoders that is annotated by the exertion
signature.
The SORCER cGrid with
Methoders was used
to deploy an algorithm called Basic Local Alignment
Search Tool (BLAST) (Alschul, 1990) to compare
newly discovered, unknown DNA and protein
sequences against a large database with more than
three gigabytes of known sequences. BLAST (C++
code) searches the database for sequences that are
identical or similar to the unknown sequence. This
process enables scientists to make inferences about
the function of the unknown sequence based on what
is understood about the similar sequences found in
the database. Many projects at the USDA–ARS
Research Unit, for example, involve as many as
10,000 unknown sequences, each of which must be
analyzed via the BLAST algorithm. A project
involving 10,000 unknown sequences requires about
three weeks to complete on a single desktop
computer. The S-BLAST implemented in SORCER
(Khurana, 2005), a federated form of the BLAST
algorithm, reduces the amount of time required to
perform searches for large sets of unknown
sequences. S-BLAST is comprised of
BlastProvider (with the attached BLAST Service
UI),
Jobbers, Spacers, and Methoders.
Methoders in S-BLAST download Java code (a
service task method) that initializes a required
database before making system call for the BLAST
code. Armed with the S-BLAST’s cGrid and
seventeen commodity computers, projects that
previously took three weeks to complete can now be
finished in less than one day.
The SORCER cGrid with
Griders, Jobbers,
Spacers, and Callers has been successfully
deployed with the Proth program (C code) and easy-
to-use zero-install service UI attached to a
Grider
and the federated file system.
5 FEDERATED FILE SYSTEM
The SILENUS federated file system (Berger, 2005;
Berger, 2007) was designed and developed to
provide data access for metaprograms. It
complements the file store developed for FIPER
(Sobolewski, 2003) with the true P2P services. The
SILENUS system itself is a collection of service
providers that use the SORCER framework for
communication.
In classical client-server file systems, a heavy
load may occur on a single file server. If multiple
service requestors try to access large files at the
same time, the server will be overloaded. In a P2P
architecture, every provider is a client and a server at
the same time. The load can be balanced between all
peers if files are spread across all of them. The
SORCER architecture splits up the functionality of
the metacomputer into smaller service peers
(
Servicers), and this approach was applied to the
distributed file system as well.
The SILENUS federated file system is comprised
of several network services that run within the
SORCER environment. These services include a
byte store service for holding file data, a metadata
service for holding metadata information about the
files, several optional optimizer services, and façade
(Grand, 1999) services to assist in accessing
federating services. SILENUS is designed so that
many instances of these services can run on a
network, and the required services will federate
together to perform the necessary functions of a file
system. In fact the SILENUS system is completely
decentralized, eliminating all potential single point
failures. SILENUS services can be broadly
categorized into gateway components, data services,
and management services.
The SILENUS façade service provides a gateway
service to the SILENUS grid for requestors that
want to use the file system. Since the metadata and
actual file contents are stored by different services,
there is a need to coordinate communication
between these two services. The façade service itself
is a combination of a control component, called the
coordinator, and a smart proxy component that
contains needed inner proxies provided dynamically
by the coordinator. These inner proxies facilitate
direct P2P communications for file upload and
download between the requestor and SILENUS
federating services like metadata and byte stores.
Core SILENUS services have been successfully
deployed as SORCER services along with WebDAV
and NFS adapters. The SILENUS file system scales
well with a virtual disk space adjusted as needed by
the corresponding number of required byte store
providers and the appropriate number of metadata
stores required to satisfy the needs of current users
and service requestors. The system handles several
types of network and computer outages by utilizing
disconnected operation and data synchronization
mechanisms. It provides a number of user agents
ICEIS 2008 - International Conference on Enterprise Information Systems
82
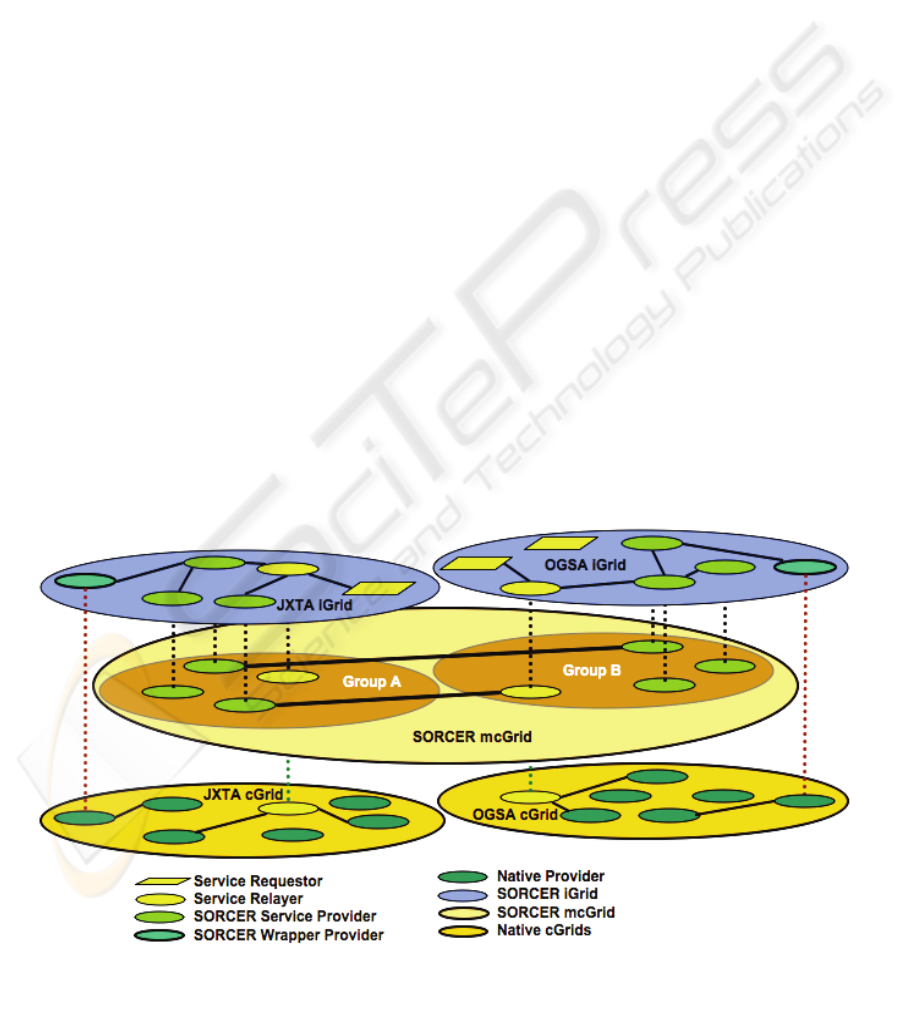
Figure 5: Integrating and wrapping cGrids with SORCER mcGrids. Two requestors, one in JXTA iGrid, one in
OGSA iGrid submits exertion to a corresponding relayer. Two federations are formed that include providers from
all the two horizontal layers below the iGrid layer (as indicated by continues and dashed links).
including a zero-install file browser attached to the
SILENUS façade. Also a simpler version of
SILENUS file browser is available for smart MIDP
phones.
SILENUS supports storing very large files
(Turner, 2007) by providing two services: a splitter
service and a tracker service. When a file is
uploaded to the file system, the splitter service
determines how that file should be stored. If a file is
sufficiently large enough, the file will be split into
multiple parts, or chunks, and stored across many
byte store services. Once the upload is complete, a
tracker service keeps a record of where each chunk
was stored. When a user requests to download the
full file later on, the tracker service can be queried to
determine the location of each chunk and the file can
be reassembled to the original form.
6 SORCER IGRID
Relayers are SORCER gateway providers that
transform exertions to native representations and
vice versa. The following
Exertion gateways have
been developed:
JxtaRelayer for JXTA (“JXTA”,
n.d.), and
WsRpcRelayer and WsDocRelayer for
for RPC and document style Web services,
respectively. Relayers exhibit native and mcGrid
behavior. Some native cGrid providers play
SORCER role (SORCER wrappers), thus are
available in the iGrid along with mcGrid providers.
Also, native cGrid providers via corresponding
relayers can access iGrid services (bottom-up in
Figure 5).
The iGrid-integrating model is depicted in Fig 5,
where horizontal native technology grids (bottom)
are seamlessly integrated with horizontal SORCER
mcGrids via the SORCER operating system
services. Through the use of open standards-based
communication—Jini, Web Services,
Globus/OGSA, and Java interoperability—iGrid
leverages mcGrid’s FSOOA with its inherent
provider protocol, location, and implementation
neutrality along with the flexibility of EO
programming for iGrid computing.
7 CONCLUSIONS
An object-oriented grid is not just a collection of
distributed objects; it is the network of unreliable
objects that come and go. From an object-oriented
point of view, the network of objects is the problem
domain of object-oriented distributed programming
that requires relevant abstractions in the solution
space—a metacompute OS. The SORCER
architecture shares the features of grid systems, P2P
systems, and provides a platform for procedural
programming and service-oriented meta-
programming as well. EO programming introduces
new network abstractions with federated method
invocation in FSOOA. It allows for creation
adaptive collaborative applications at the exertion
runtime.
SORCER: COMPUTING AND METACOMPUTING INTERGRID
83

Executing a top-level exertion means federating
currently available providers in the network that
collaboratively process service contexts of all nested
exertions. Services are invoked by passing exertions
on to one another indirectly via object proxies that
act as access proxies allowing for service providers
to enforce security policies on access to services.
When permission is granted, then the operation
defined by a signature is invoked by reflection.
SORCER allows for P2P computing via the common
Servicer interface, extensive modularization of
Exertions and Exerters, and extensibility from
the Triple Command design pattern. The SORCER
federated file system is modularized into a collection
of distributed providers with multiple remote
façades. Façades supply uniform access points via
their smart proxies available dynamically to file
requestors. A façade’s smart proxy encapsulates
inner proxies to federating file system providers that
are accessed directly (P2P) by file requestors.
The SORCER iGrid has been successfully tested
in multiple concurrent engineering and large-scale
distributed applications (Burton, 2002; Kolonay,
2002; Sampath, 2002; Kao, 2003; Lapinski, 2003;
Khurana, 2005; Sobolewski, 2006; Berger, 2007;
Turner, 2007; Goel, 2005; Goel, 2007; Kolonay,
2007; “SORCER Research”, 2008). Due to the
large-scale complexity of the evolving iGrid
environment, it is still a work in progress and
continues to be refined and extended by the
SORCER Research Group at Texas Tech University
(“SORCER Lab”, n.d.) in collaboration with Air
Force Research Lab, WPAFB. The SORCER
approach is consistent with the object-oriented
distributed granularity of many service provider and
exertion types, and provider configuration-based
dependency injection.
REFERENCES
Altschul, S.F., Gish, W., Miller, W., Myers, E. W. &
Lipman, D. J. (1990). Basic Local Alignment Search
Tool. J. Mol. Biol. 215:403-410.
Berger, M., Sobolewski, M. (2005). SILENUS—A Federated
Service-oriented Approach to Distributed File
Systems, Next Generation Concurrent Engineering.
ISPE/Omnipress, ISBN 0-9768246-0-4, pp. 89-96.
Berger, M., Sobolewski, M. (2007) Lessons Learned from
the SILENUS Federated File System, Complex
Systems Concurrent Engineering, Loureiro, G. and
L.Curran, R. (Eds.). Springer Verlag, ISBN: 978-1-
84628-975-0, pp. 431-440.
Burton, S. A., Tappeta, R., Kolonay, R. M., Padmanabhan, D.
(2002). Turbine Blade Reliability-based Optimization
Using Variable-Complexity Method, 43
rd
AIAA/ASME/ASCE/AHS/ASC Structures, Structural
Dynamics, and Materials Conference, Denver, Colorado.
AIAA 2002-1710.
Edwards, W. K. (2000). Core Jini, 2nd ed., Prentice Hall,
ISBN: 0-13-089408.
Fallacies of Distributed Computing. Retrieved March 5,
2008, from:http://en.wikipedia.org/wiki/Fallacies_of
_Distributed_Computing.
FIPER: Federated Intelligent Product EnviRonmet.
Retrieved March 5, 2008, from: http://sorcer.cs.ttu.
edu/fiper/fiper.html.
Foster, I., Kesselman, C., Nick, J., S. Tuecke, S. (2002).
The Physiology of the Grid: An Open Grid Services
Architecture for Distributed Systems Integration.,
Open Grid Service Infrastructure WG, Global Grid
Forum, June 22, 2002. Retrieved March 5, 2008, from:
http://www.globus.org/alliance/publications/papers/og
sa.pdf.
Freeman, E., Hupfer, S., & Arnold, K. (1999).
JavaSpaces™ Principles, Patterns, and Practice.
Addison-Wesley, ISBN: 0-201-30955-6.
Goel, S, Talya, S., and Sobolewski, M. (2005).
Preliminary Design Using Distributed Service-based
Computing, Next Generation Concurrent Engineering.
ISPE/Omnipress, ISBN 0-9768246-0-4, pp. 113-120.
Goel, S., Talya, S., Sobolewski, M. (2007). Service-based
P2P overlay network for collaborative problem
solving, Decision Support Systems, Volume 43, Issue
2: pp. 547-568, 2007.
Grand, M. (1999). Patterns in Java. Volume 1, Wiley,
ISBN: 0-471-25841-5.
Inca X™ Service Browser for Jini Technology. Retrieved
March 5, 2008, from: http://www.incax.com/
index.htm?http://www.incax.com/service-
browser.htm.
JXTA (n.d). Retrieved March 5, 2008, from:
https://jxta.dev.java.net/
Jini architecture specification, Version 1.2., 2001.
Retrieved March 5, 2008, from: http://www.sun.com/
software/jini/specs/jini1.2html/jini-title.html.
Jini.org. Retrieved March 5, 2008, from:
http://www.jini.org/.
Kao, K. J., Seeley, C.E., Yin, S., Kolonay, R.M., Rus, T.,
Paradis, M.J. (2003). Business-to-Business Virtual
Collaboartion of Aircraft Engine Combustor Design,
Proceedings of DETC’03 ASME 2003 Design
Engineering Technical Conferences and Computers
and Information in Engineering Conference, Chicago,
Illinois.
Khurana, V., Berger, M., Sobolewski, M. (2005). A
Federated Grid Environment with Replication
Services. Next Generation Concurrent Engineering.
ISPE/Omnipress, ISBN 0-9768246-0-4, pp. 97-103.
Kolonay, R. M., Sobolewski, M., Tappeta, R., Paradis, M.,
Burton, S. (2002). Network-Centric MAO Environment.
The Society for Modeling and Simulation
International, Westrn Multiconference, San Antonio,
TX.
ICEIS 2008 - International Conference on Enterprise Information Systems
84

Kolonay, R. M., Thompson, E.D., Camberos, J.A.,
Franklin Eastep, F. (2007). Active Control of
Transpiration Boundary Conditions for Drag
Minimization with an Euler CFD Solver, AIAA-2007-
1891, 48th AIAA/ASME/ASCE/AHS/ASC Structures,
Structural Dynamics, and Materials Conference,
Honolulu, Hawaii.
Lapinski, M., Sobolewski, M. (2003). Managing
Notifications in a Federated S2S Environment,
International Journal of Concurrent Engineering:
Research & Applications, Vol. 11: pp. 17-25.
McGovern, J., Tyagi, S., Stevens, M. E., Mathew, S.
(2003). Java Web Services Architecture, Morgan
Kaufmann.
Nimrod: Tools for Distributed Parametric Modelling. Retrieved
March5,2008,from:http://www.csse.monash.edu.au/
~davida/nimrod/nimrodg.htm.
Oram, A. (Editor) (2001). Peer-to-Peer: Harnessing the
Benefits of Disruptive Technology. O'Reilly.
Package net.jini.jeri. Retrieved March 5, 2008, from:
http://java.sun.com/products/jini/2.1/doc/api/net/jini/je
ri/package-summary.html
Pitt, E. (2001) java™.rmi: The Remote Method Invocation
Guide. Addison-Wesley
Project Rio. A Dynamic Service Architecture for
Distributed Applications. Retrieved March 5, 2008,
from: https://rio.dev.java.net/.
Röhl, P. J., Kolonay, R. M., Irani, R. K., Sobolewski, M., Kao, K.
(2000). A Federated Intelligent Product Environment.AIAA-
2000 - 4902, 8thAIAA/USAF/NASA/ISSMO Symposium on
Multidisciplinary Analysis and Optimization, Long Beach,
CA.
Ruh, W. A., Herron, T., Klinker, P. (1999). IIOP
Complete: Understanding CORBA and Middleware
Interoperability. Addison-Wesley.
Sampath, R., Kolonay, R. M, Kuhne, C. M. (2002). 2D/3D
CFD Design Optimization Using the Federated
Intelligent Product Environment (FIPER) Technology.
AIAA-2002-5479, 9th AIAA/ISSMO Symposium on
Multidisciplinary Analysis and Optimization, Atlanta,
GA.
Sobolewski, M. (2002a). Federated P2P services in CE
Environments. Advances in Concurrent Engineering.
A.A. Balkema Publishers, 2002, pp. 13-22, 2002.
Sobolewski, M. (2002b). FIPER: The Federated S2S
Environment. JavaOne, Sun's 2002 Worldwide Java
Developer Conference. Retrieved March 5, 2008, from:
http://sorcer.cs.ttu.edu/publications/papers/2420.pdf.
Sobolewski, M., Soorianarayanan, S., Malladi-Venkata, R-
K. (2003). Service-Oriented File Sharing, Proceedings
of the IASTED Intl., Conference on Communications,
Internet, and Information technology, pp. 633-639,
Scottsdale, AZ. ACTA Press.
Sobolewski, M., Kolonay R. (2006) Federated Grid Computing
with Interactive Service-oriented Programming,
International Journal of Concurrent Engineering:
Research & Applications. Vol. 14: pp. 55-66.
Sobolewski, M. (2007). Federated Method Invocation with
Exertions, Proceedings of the International
Multiconference on Computer Science and Information
Technology, Springer Verlag, ISSN 1896-7094, Vol. 2: pp.
765 – 778. Retrieved March 5, 2008, from:
http://www.proceedings2007.imcsit.org/pliks/96.pdf.
Sobolewski, M. (2008). Service-oriented Programming,
SORCER Technical Report SL-TR-13. Retrieved March 5,
2008,from:http://sorcer.cs.ttu.edu/publications/papers/2008/
SL-TR-13.pdf.
Soorianarayanan, S., Sobolewski, M. (2004). Monitoring
Federated Services in CE, Concurrent Engineering:
The Worldwide Engineering Grid, Tsinghua Press and
Springer Verlag, ISBN 7-302-08802-0, pp. 89-95.
SORCER Lab. RetrievedMarch5, 2008, from:
http://sorcer.cs.ttu.edu/.
SORCER Research Topics. Retrieved March 5, 2008,
from: http://sorcer.cs.ttu.edu/theses/.
Sotomayor, B., Childers, L. (2005). Globus® Toolkit 4:
Programming Java Services. Morgan Kaufmann.
Thain, D., Tannenbaum, T., Livny, M. (2003). Condor and
the Grid. In Fran Berman, Anthony J.G. Hey, and
Geoffrey Fox, editors, Grid Computing: Making The
Global Infrastructure a Reality. John Wiley.
Turner, A., Sobolewski, M. (2007). FICUS—A Federated
Service-Oriented File Transfer Framework, Complex
Systems Concurrent Engineering, Loureiro, G. and
L.Curran, R. (Eds.). Springer Verlag, ISBN: 978-1-
84628-975-0, pp. 421-430.
The Service UI Project. Retrieved March 5, 2008, from:
http://www.artima.com/jini/serviceui/index.html.
Waldo, J. (n.d.). The End of Protocols. Retrieved March 5,
2008,from: http://java.sun.com/developer/technicalArticles/
jini/protocols.html.
Zhao, S., and Sobolewski, M. (2001). Context Model
Sharing in the FIPER Environment, Proc. of the 8th
Int. Conference on Concurrent Engineering: Research
and Applications, Anaheim, CA.
SORCER: COMPUTING AND METACOMPUTING INTERGRID
85
