
A MEMETIC-GRASP ALGORITHM FOR CLUSTERING
Yannis Marinakis, Magdalene Marinaki, Nikolaos Matsatsinis and Constantin Zopounidis
Department of Production Engineering and Management, Technical University of Crete
University Campus, 73100 Chania, Greece
Keywords: Clustering analysis, Feature selection problem, Memetic Algorithms, Particle Swarm Optimization,
GRASP.
Abstract: This paper presents a new memetic algorithm, which is based on the concepts of Genetic Algorithms (GAs),
Particle Swarm Optimization (PSO) and Greedy Randomized Adaptive Search Procedure (GRASP), for
optimally clustering N objects into K clusters. The proposed algorithm is a two phase algorithm which
combines a memetic algorithm for the solution of the feature selection problem and a GRASP algorithm for
the solution of the clustering problem. In this paper, contrary to the genetic algorithms, the evolution of each
individual of the population is realized with the use of a PSO algorithm where each individual have to
improve its physical movement following the basic principles of PSO until it will obtain the requirements to
be selected as a parent. Its performance is compared with other popular metaheuristic methods like classic
genetic algorithms, tabu search, GRASP, ant colony optimization and particle swarm optimization. In order
to assess the efficacy of the proposed algorithm, this methodology is evaluated on datasets from the UCI
Machine Learning Repository. The high performance of the proposed algorithm is achieved as the algorithm
gives very good results and in some instances the percentage of the corrected clustered samples is very high
and is larger than 96%.
1 INTRODUCTION
Clustering analysis is one of the most important
problem that has been addressed in many contexts
and by researchers in many disciplines and it
identifies clusters (groups) embedded in the data,
where each cluster consists of objects that are
similar to one another and dissimilar to objects in
other clusters (Jain et al., 1999; Mirkin, 1996;
Rokach and Maimon, 2005; Xu and Wunsch II,
2005).
The typical clustering analysis consists of four
steps (with a feedback pathway) which are the
feature selection or extraction, the clustering
algorithm design or selection, the cluster validation
and the results interpretation (Xu and Wunsch II,
2005).
The basic feature selection problem (FSP) is an
optimization one, where a search through the space
of feature subsets is conducted in order to identify
the optimal or near-optimal one with respect to the
performance measure. In the literature many
successful feature selection algorithms have been
proposed (Aha and Bankert, 1996; Cantu-Paz et al.,
2004; Jain and Zongker, 1997; Marinakis et al.,
2007). Feature extraction utilizes some
transformations to generate useful and novel features
from the original ones.
The clustering algorithm design or selection step
is usually combined with the selection of a
corresponding proximity measure and the
construction of a criterion function which makes the
partition of clusters a well defined optimization
problem (Jain et al., 1999; Rokach and Maimon,
2005). Many heuristic, metaheuristic and stochastic
algorithms have been developed in order to find a
near optimal solution in reasonable computational
time. Suggestively, for example, clustering
algorithms based on Tabu Search (Liu et al., 2005),
Simulated Annealing (Chu and Roddick, 2000),
Greedy Randomized Adaptive Search Procedure
(Cano et al., 2002), Genetic Algorithms (Sheng and
Liu, 2006; Yeh and Fu, 2007); Neural Networks
(Liao and Wen, 2007), Ant Colony Optimization
(Azzag et al., 2007; Kao and Cheng, 2006; Yang and
Kamel, 2006) Particle Swarm Optimization (Kao et
al., 2007; Paterlini and Krink, 2006; Sun et al.,
2006) and Immune Systems (Li and Tan, 2006;
Younsi and Wang, 2004) have proposed in the
36
Marinakis Y., Marinaki M., Matsatsinis N. and Zopounidis C. (2008).
A MEMETIC-GRASP ALGORITHM FOR CLUSTERING.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - AIDSS, pages 36-43
DOI: 10.5220/0001694700360043
Copyright
c
SciTePress

literature. An analytical survey of the clustering
algorithms can be found in (Jain et al., 1999; Rokach
and Maimon, 2005; Xu and Wunsch II, 2005).
Cluster validity analysis is the assessment of a
clustering procedure’s output using effective
evaluation standards and criteria (Jain et al., 1999;
Xu and Wunsch II, 2005). In the results
interpretation step, experts in the relevant fields
interpret the data partition in order to guarantee the
reliability of the extracted knowledge.
In this paper, a new hybrid metaheuristic
algorithm that uses a memetic algorithm (Moscato,
2003) for the solution of the feature selection
problem and a Greedy Randomized Adaptive Search
Procedure (GRASP) (Feo and Resende, 1995) for
the solution of the clustering problem is proposed.
The reason that a memetic algorithm, i.e. a genetic
algorithm with a local search phase (Moscato, 2003),
is used instead of a classic genetic algorithm is that
it is very difficult for a pure genetic algorithm to
effectively explore the solution space. A
combination of a global search optimization method
with a local search optimization method usually
improves the performance of the algorithm. In this
paper instead of using a local search method to
improve each individual separately, we use a global
search method, like Particle Swarm Optimization,
and, thus, each individual does not try to improve its
solution by itself but it uses knowledge from the
solutions of the whole population. In order to assess
the efficacy of the proposed algorithm, this
methodology is evaluated on datasets from the UCI
Machine Learning Repository. The rest of this paper
is organized as follows: In the next section the
proposed Memetic Algorithm is presented and
analyzed in detail. In section 3, the analytical
computational results for the datasets taken from the
UCI Machine Learning Repository are presented
while in the last section conclusions and future
research are given.
2 THE PROPOSED
MEMETIC-GRASP
ALGORITHM
2.1 Introduction
The proposed algorithm (MEMETIC-GRASP) for
the solution of the clustering problem is a two phase
algorithm which combines a memetic algorithm
(MA) for the solution of the feature selection
problem and a Greedy Randomized Adaptive Search
Procedure (GRASP) for the solution of the
clustering problem. In this algorithm, the activated
features are calculated by the memetic algorithm
(see section 2.4) and the fitness (quality) of each
member of the population is calculated by the
clustering algorithm (see section 2.5). In the
following, initially the clustering problem is stated,
then a general description of the proposed algorithm
is given while in the last two subsections each of the
phases of the algorithm are presented analytically.
2.2 The Clustering Problem
The problem of clustering N objects (patterns) into K
clusters is considered: Given N objects in R
n
,
allocate each object to one of K clusters such that the
sum of squared Euclidean distances between each
object and the center of its belonging cluster (which
is also to be found) for every such allocated object is
minimized. The clustering problem can be
mathematically described as follows:
Minimize
∑∑
==
−=
N
i
K
j
jiij
zxwzwJ
11
2
),(
(1)
subject to
, ..., N i w
K
j
ij
1 ,1
1
==
∑
=
(2)
, ..., K j , ..., N, i w
ij
11 ,1or 0 =
=
=
(3)
where:
K is the number of clusters (given or unknown),
N is the number of objects (given),
x
i
∈ R
n
, (i =1,..., N) is the location of the ith
pattern (given),
z
j
∈ R
n
, (j =1,..., K) is the center of the jth cluster
(to be found), where
∑
=
=
N
i
iij
j
j
xw
N
z
1
1
(4)
where N
j
is the number of objects in the jth cluster,
w
ij
is the association weight of pattern x
i
with
cluster j, (to be found), where:
⎪
⎪
⎩
⎪
⎪
⎨
⎧
==∀
=
otherwise. 0
11
cluster toallocated ispattern if 1
, ..., K j , ..., N, i
j, i
w
ij
(5)
A MEMETIC-GRASP ALGORITHM FOR CLUSTERING
37

2.3 General Description of the
Algorithm
Initially, as it was mentioned in the section 2.1, in
the first phase of the algorithm a number of features
are activated, using a Memetic Algorithm. Usually
in a genetic algorithm each individual of the
population is used in discrete phases. Some of the
individuals are selected as parents and by using a
crossover and a mutation operator they produce the
offspring which can replace them in the population.
But this is not what really happens in real life. Each
individual has the possibility to evolve in order to
optimize its behaviour as it goes from one phase to
the other during its life. Thus, in the proposed
memetic algorithm, the evolution of each individual
of the population is realized with the use of a PSO
algorithm. In order to find the clustering of the
samples (fitness or quality of the genetic algorithm),
a GRASP algorithm is used. The clustering
algorithm has the possibility to solve the clustering
problem with known or unknown number of
clusters. When the number of clusters is known the
Eq. (1), denoted as SSE, is used in order to find the
best clustering. In the case that the number of
clusters is unknown two additional measures are
used. The one measure is the minimization of the
distance between the centers of the clusters:
()
∑∑
−=
K
i
K
j
ji
zzSSC .
2
(6)
The second measure is the minimization of a
validity index ([Ray and Turi (1999)], [Shen et al.
(2005)]) given by:
.
SSC
SSE
validity =
(7)
2.4 Memetic Algorithm for the Feature
Selection Problem
In this paper, a Memetic Algorithm is used for
feature selection. A Memetic Algorithm is a Genetic
Algorithm with a local search procedure (Moscatto,
2003). Genetic Algorithms (GAs) are search
procedures based on the mechanics of natural
selection and natural genetics (Holland, 1975;
Goldberg, 1989). They offer a particularly attractive
approach for problems like feature subset selection
since they are generally quite effective for rapid
global search of large, non-linear and poorly
understood spaces. A pseudocode of the proposed
algorithm is presented in the following and, then, a
short description of each phase of the Memetic-
GRASP algorithm is presented.
Initialization
Generate the initial population
Evaluate the fitness of each individual using the
GRASP algorithm for Clustering
Main Phase
Do while stopping criteria are not satisfied
Select individuals from the population to be
parents
Call crossover operator to produce offspring
Call mutation operator
Evaluate the fitness of the offspring using the
GRASP algorithm for clustering
Call PSO
Evaluate the fitness of the offspring using the
GRASP algorithm for clustering
Replace the population with the fittest of the
whole population
Enddo
In the proposed algorithm, each individual in the
population represents a candidate solution to the
feature subset selection problem. Let m be the total
number of features (from these features the choice of
the features used to represent each individual is
done). The individual (chromosome) is represented
by a binary vector of dimension m. If a bit is equal to
1 it means that the corresponding feature is selected
(activated); otherwise the feature is not selected.
This is the simplest and most straightforward
representation scheme.
The initial population is generated randomly.
Thus, in order to explore subsets of different
numbers of features, the number of 1’s for each
individual is generated randomly. In order to have
diversity of the initial population, only different
individuals are allowed. The fitness function gives
the quality of the produced member of the
population and is calculated using the GRASP
algorithm for clustering described in the following
section.
The selection mechanism is responsible for
selecting the parent chromosome from the
population and forming the mating pool. The
selection mechanism emulates the survival of- the-
fittest mechanism in nature. It is expected that a
fitter chromosome has a higher chance of surviving
on the subsequent evolution. In this work, we are
using as selection mechanism, the roulette wheel
selection (Goldberg, 1989), the 1-point crossover in
the crossover phase of the algorithm and, then, a
mutation phase (Goldberg, 1989). Afterwards, for
each offspring its fitness function is calculated.
ICEIS 2008 - International Conference on Enterprise Information Systems
38

In the evolution phase of the population a
Particle Swarm Optimization algorithm is used.
Particle swarm optimization (PSO) is a population-
based swarm intelligence algorithm. It was
originally proposed by (Kennedy and Eberhart,
1995) as a simulation of the social behaviour of
social organisms such as bird flocking and fish
schooling. PSO uses the physical movements of the
individuals in the swarm and has a flexible and well-
balanced mechanism to enhance and adapt to the
global and local exploration abilities. The swarm of
particles in the PSO is, usually initialized at random
but here the individuals of the population take the
place of the particles in the swarm. In each iteration,
the swarm is updated by the following equations
(Kennedy and Eberhart, 1997) applied for the
discrete binary version of PSO:
υ
id
(t+1) = wυ
id
(t) + c
1
rand1 (p
id
− s
id
(t)) + c
2
rand2 (p
g
d
− s
id
(t))
(8)
)exp(1
1
)(
id
id
sig
υ
υ
−+
=
(9)
⎩
⎨
⎧
≥
<
=+
)(3 if ,0
)(3 if ,1
)1(
id
id
id
sigrand
sigrand
ts
υ
υ
(10)
where υ
id
is the corresponding velocity; s
id
∈{0, 1} is
the current solution; p
id
is the best position
encountered by ith particle so far; p
gd
represents the
best position found by any member in the whole
swarm population; t is iteration counter; rand1,
rand2 and rand3
are three uniform random numbers
in [0, 1]; w is the inertia weight; c
1
and c
2
are
acceleration coefficients. The acceleration
coefficients control how far a particle will move in a
single iteration. As in the basic PSO algorithm, a
parameter V
max
is introduced to limit υ
id
so that
sig(υ
id
) does not approach too closely 0 or 1
(Kennedy et al., 2001). Such implementation can
ensure that the bit can transfer between 1 and 0 with
a positive probability. In practice, V
max
is often set at
±4. The inertia weight w (developed by (Shi and
Eberhart, 1998)) controls the impact of previous
histories of velocities on current velocity and the
convergence behaviour of the PSO algorithm. The
particle adjusts its trajectory based on information
about its previous best performance and the best
performance of its neighbors. The inertia weight w is
updated according to the following equation:
t
iter
ww
ww ×
−
−=
max
minmax
max
(11)
where w
max
, w
min
are the maximum and minimum
values that the inertia weight can take and iter
max
is
the maximum number of iterations (generations).
As it has, already, been mentioned in the next
generation, the fittest from the whole population (i.e.
the initial population and the offspring from
mutation, crossover and evolution phases) survives.
Thus, the population is sorted based on the fitness
function of the individuals and in the next generation
the fittest individuals survive. It must be mentioned
that the size of the population of each generation is
equal to the initial size of the population. There are
two stopping criteria for the memetic algorithm. The
one is the maximum number of generations, which is
a variable of the problem, and the other is the
genetic convergence, which means that whenever
the solutions of the genetic algorithm converge to
one solution the genetic algorithm stops.
2.5 Greedy Randomized Adaptive
Search Procedure for the
Clustering Problem
As it was mentioned earlier in the clustering phase
of the proposed algorithm a Greedy Randomized
Adaptive Search Procedure (GRASP) (Feo and
Resende, 1995; Marinakis et al., 2005; Resende and
Ribeiro, 2003) is used. GRASP is an iterative two
phase search algorithm which has gained
considerable popularity in combinatorial
optimization. Each iteration consists of two phases, a
construction phase and a local search phase. In the
construction phase, a randomized greedy function is
used to build up an initial solution. The choice of the
next element to be added is determined by ordering
all elements in a candidate list (Restricted Candidate
List – RCL) with respect to a greedy function. The
probabilistic component of a GRASP is
characterized by randomly choosing one of the best
candidates in the list but not necessarily the top
candidate. This randomized technique provides a
feasible solution within each iteration. This solution
is then exposed for improvement attempts in the
local search phase. The final result is simply the best
solution found over all iterations.
In the following, the way the GRASP algorithm
is applied for the solution of the clustering problem
is analyzed in detail. An initial solution (i.e. an
initial clustering of the samples in the clusters) is
constructed step by step and, then, this solution is
exposed for development in the local search phase of
the algorithm. The first problem that we have to face
was the selection of the number of the clusters.
Thus, the algorithm works with two different ways.
A MEMETIC-GRASP ALGORITHM FOR CLUSTERING
39
If the number of clusters is known a priori, then
a number of samples equal to the number of clusters
are selected randomly as the initial clusters. In this
case, as the iterations of GRASP increased the
number of clusters does not change. In each
iteration, different samples (equal to the number of
clusters) are selected as initial clusters. Afterwards,
the RCL is created. In our implementation, the best
promising candidate samples are selected to create
the RCL. The samples in the list are ordered taking
into account the distance of each sample from all
centers of the clusters and the ordering is from the
smallest to the largest distance. From this list, the
first D samples (D is a parameter of the problem) are
selected in order to form the final Restricted
Candidate List. The candidate sample for inclusion
in the solution is selected randomly from the RCL
using a random number generator. Finally, the RCL
is readjusted in every iteration by recalculated all the
distances based on the new centers and replacing the
sample which has been included in the solution by
another sample that does not belong to the RCL,
namely the (D + iter)th sample where iter is the
number of the current iteration. When all the
samples have been assigned to clusters three
measures are calculated (the best solution is
calculated based on the sum of squared Euclidean
distances between each object and the center of its
belonging cluster, see section 2.2) and a local search
strategy is applied in order to improve the solution.
The local search works as follows: For each sample
the probability of its reassignment in a different
cluster is examined by calculating the distance of the
sample from the centers. If a sample is reassigned to
a different cluster the new centers are calculated.
The local search phase stops when in an iteration no
sample is reassigned.
If the number of clusters is unknown, then,
initially a number of samples are selected randomly
as the initial clusters. Now, as the iterations of
GRASP increased the number of clusters changes
and cannot become less than two. In each iteration,
different number of clusters can be found. The
creation of the initial solutions and the local search
phase work as in the previous case. The only
difference compared to the previous case concerns
the use of the validity measure in order to choose the
best solution because as we have different number of
clusters in each iteration the sum of squared
Euclidean distances varies significantly for each
solution.
3 COMPUTATIONAL RESULTS
3.1 Data and Parameter Description
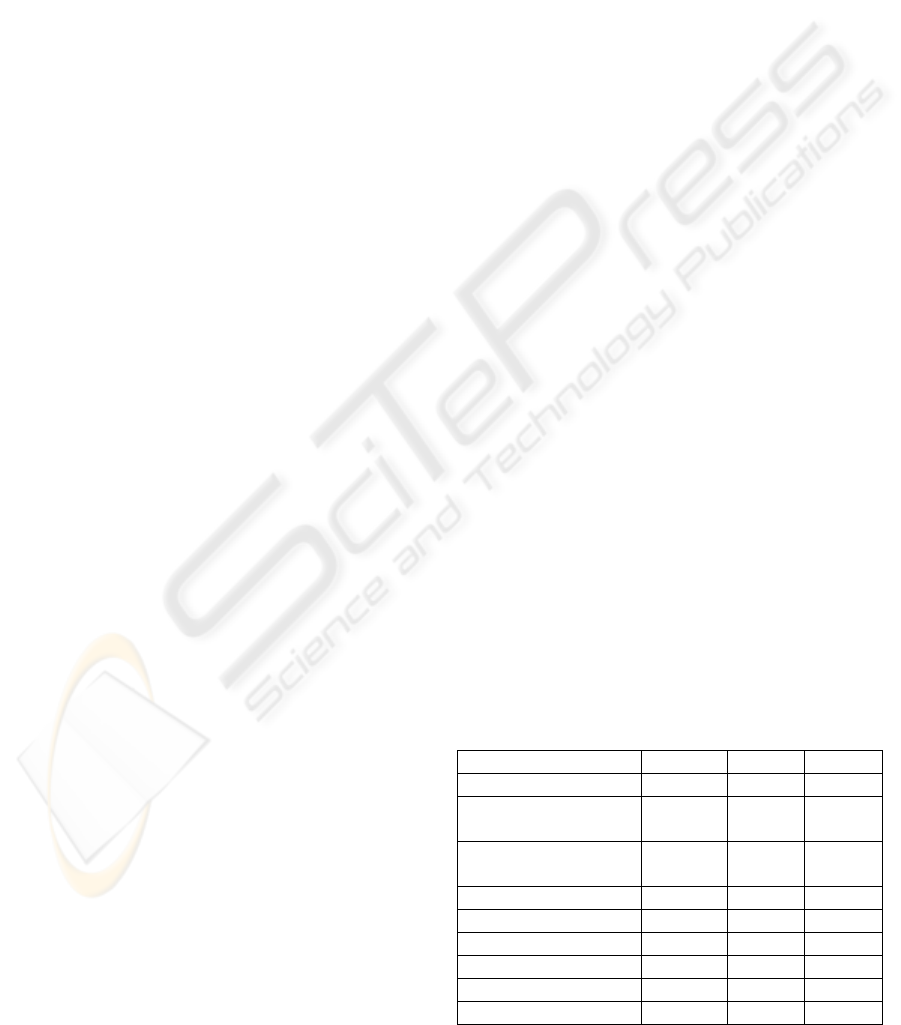
The performance of the proposed methodology is
tested on 9 benchmark instances taken from the UCI
Machine Learning Repository. The datasets were
chosen to include a wide range of domains and their
characteristics are given in Table 1 (In this Table in
the 2
nd
column the number of observations are given,
in the 3
rd
the number of features and the last the
number of clusters). In one case (Breast Cancer
Wisconsin) the data set is appeared with different
size of observations because in this data set there is a
number of missing values. This problem was faced
by either taking the mean values of all the
observations in the corresponding feature when all
the observations are used or by not taking into
account the observations that they had missing
values when we have less values in the observations.
Some data sets involve only numerical features and
the remaining include both numerical and
categorical features. For each data set, Table 1
reports the total number of features and the number
of categorical features in parentheses. The algorithm
was implemented in Fortran 90 and was compiled
using the Lahey f95 compiler on a Centrino Mobile
Intel Pentium M 750 at 1.86 GHz, running Suse
Linux 9.1. The parameters of the proposed algorithm
are selected after thorough testing and they are: The
number of generations of the memetic is set equal to
20; The population size is set equal to 500; The
crossover probability is set equal to 0.8; The
mutation probability is set equal to 0.25; The
number of swarms is set equal to 1; The number of
particles is set equal to 500; The number of
generations of PSO is set equal to 50; The size of
RCL varies between 50; The number of GRASP’s
iterations is equal to 100; The parameters of PSO are
c
1
= 2, c
2
= 2, w
max
= 0.9 and w
min
= 0.01.
Table 1: Data Sets Characteristics.
Data Sets Obser. Feat. Clus.
Australian Credit (AC) 690 14(8) 2
Breast Cancer
Wisconsin 1 (BCW1)
699 9 2
Breast Cancer
Wisconsin 2 (BCW2)
683 9 2
Heart Disease (HD) 270 13(7) 2
Hepatitis 1 (Hep1) 155 19 (13) 2
Ionosphere (Ion) 351 34 2
Spambase (Spam) 4601 57 2
Iris 150 4 3
Wine 178 13 3
ICEIS 2008 - International Conference on Enterprise Information Systems
40

3.2 Results of the Proposed Algorithm
The objective of the computational experiments is to
show the performance of the proposed algorithm in
searching for a reduced set of features with high
clustering of the data. Because of the curse of
dimensionality, it is often necessary and beneficial
to limit the number of input features in order to have
a good predictive and less computationally intensive
model. In general there are 2
number of features
-1 possible
feature combinations and, thus, in our cases the most
difficult problem is the Spambase where the number
of feature combinations is 2
57
-1.
A comparison with other metaheuristic
approaches for the solution of the clustering problem
is presented in Table 2. In this Table, seven other
algorithms are used for the solution of the feature
subset selection problem and for the clustering
problem. In the first group of algorithms in this
Table, a PSO algorithm is used for the solution of
the feature selection problem while a GRASP is
used in the clustering phase (columns 4 and 5 of
Table 2), an Ant Colony Optimization Algorithm
(Dorigo and Stützle, 2004) is used for the feature
selection problem with GRASP in the clustering
phase (columns 6 and 7 of Table 2) and a genetic
algorithm is used in the first phase of the algorithm
while a GRASP is used in the second phase of the
algorithm (columns 8 and 9 of Table 2). In the
second group of algorithms and in columns 2 and 3
of Table 2, a Tabu Search Algorithm (Glover, 1989)
is used in the first phase and a GRASP is used in the
second phase, in columns 4 and 5 of Table 2 a PSO
is used in the first phase and an Ant Colony
Optimization algorithm is used in the second phase,
in columns 6 and 7 of Table 2 of the second group in
both phases (feature selection phase and clustering
phase) an Ant Colony Optimization algorithm is
used while in columns 8 and 9 of Table 2 of the
second group a PSO is used in both phases (feature
selection phase and clustering phase).
From this table, it can be observed that the
Memetic-GRASP algorithm performs better (has the
largest number of correct clustered samples) than the
other seven algorithms in all instances. It should be
mentioned that in some instances the differences in
the results between the Memetic-GRASP algorithm
and the other seven algorithms are very significant.
Mainly, for the two data sets that have the largest
number of features compared to the other data sets,
i.e. in the Ionosphere data set the percentage of
corrected clustered samples for the Memetic-
GRASP algorithm is 86.89% while for all the other
methods the percentage varies between 73.50% to
86.03%, and in the Spambase data set the percentage
of corrected clustered samples for the Memetic-
GRASP algorithm is 87.35% while for all the other
methods the percentage varies between 82.80% to
87.19%. It should, also, be noted that a hybridization
algorithm performs always better than a no
hybridized algorithm. More precisely, the only three
algorithms that are competitive in almost all
instances with the proposed Memetic-GRASP
algorithm are the Hybrid PSO - ACO, the Hybrid
PSO - GRASP and the Hybrid ACO - GRASP
algorithms. These results prove the significance of
the solution of the feature selection problem in the
clustering algorithm as when more sophisticated
methods for the solution of this problem were used
the performance of the clustering algorithm was
improved. The significance of the solution of the
feature selection problem using the Memetic
Algorithm is, also, proved by the fact that with this
algorithm the best solution was found by using
fewer features than the other algorithms used in the
comparisons. More precisely, in the most difficult
instance, the Spambase instance, the proposed
algorithm needed 32 features in order to find the
optimal solution, while the other seven algorithms
the algorithms needed between 34 - 56 features to
find their best solution. A very significant
observation is that the results of the proposed
Memetic-GRASP algorithm are better than those
obtained when a classic genetic algorithm was used.
The percentage in the correct clustered instances in
the Memetic-GRASP algorithm is 0.15% to 11.11%
greater than the percentage in the genetic algorithm.
It should, also, be mentioned that the algorithm was
tested with two options: with known and unknown
number of clusters. When the number of clusters
was unknown and, thus, in each iteration of the
algorithm different initial values of clusters were
selected the algorithm always converged to the
optimal number of clusters and with the same results
as in the case that the number of clusters was known.
4 CONCLUSIONS
In this paper a new metaheuristic algorithm is
proposed for solving the Clustering Problem. This
algorithm is a two phase algorithm which combines
a memetic algorithm for the solution of the feature
selection problem and a Greedy Randomized
Adaptive Search Procedure (GRASP) for the
solution of the clustering problem. The performance
A MEMETIC-GRASP ALGORITHM FOR CLUSTERING
41
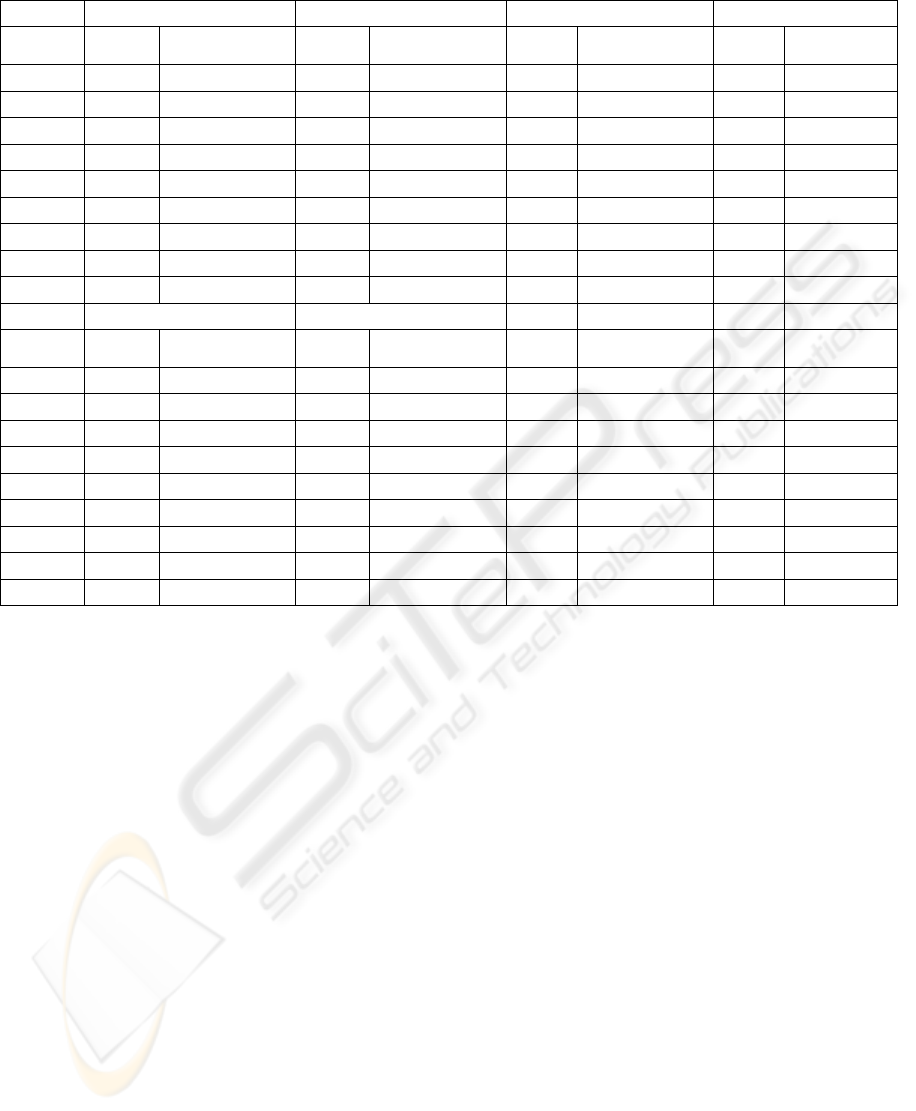
Table 2: Results of the Algorithms.
Method
Memetic-GRASP
PSO-GRASP ACO-GRASP Genetic-GRASP
Sel.
Feat. Cor. Clust.
Sel.
Feat. Cor. Clust.
Sel.
Feat. Cor. Clust.
Sel.
Feat. Cor. Clust.
BCW2 5 664(97.21%) 5 662(96.92%) 5 662(96.92%) 5 662(96.92%)
Hep1 9 139(89.67%) 7 135(87.09%) 9 134(86.45%) 9 134(86.45%)
AC 8 604(87.53%) 8 604(87.53%) 8 603(87.39%) 8 602(87.24%)
BCW1 8 677(96.85%) 5 676(96.70%) 5 676(96.70%) 5 676(96.70%)
Ion 5 305(86.89%) 11 300(85.47%) 2 291(82.90%) 17 266(75.78%)
spam 32 4019(87.35%) 51 4009(87.13%) 56 3993(86.78%) 56 3938(85.59%)
HD 9 236(87.41%) 9 232(85.92%) 9 232(85.92%) 7 231(85.55%)
Iris 3 146(97.33%) 3 145(96.67%) 3 145(96.67%) 4 145(96.67%)
Wine 7 176(98.87%) 7 176(98.87%) 8 176(98.87%) 7 175(98.31%)
Method Tabu-GRASP PSO-ACO ACO PSO
Sel.
Feat. Cor. Clust.
Sel.
Feat. Cor. Clust.
Sel.
Feat. Cor. Clust.
Sel.
Feat. Cor. Clust.
BCW2 6 661(96.77%) 5 664(97.21%) 5 662(96.92%) 5 662(96.92%)
Hep1 10 132(85.16%) 6 139(89.67%) 9 133(85.80%) 10 132(85.16%)
AC 9 599(86.81%) 8 604(87.53%) 8 601(87.10%) 8 602(87.24%)
BCW1 8 674(96.42%) 5 677(96.85%) 8 674(96.42%) 8 674(96.42%)
Ion 4 263(74.92%) 7 302(86.03%) 16 258(73.50%) 12 261(74.35%)
spam 34 3810(82.80%) 39 4012(87.19%) 41 3967(86.22%) 37 3960(86.06%)
HD 9 227(84.07%) 9 235(87.03%) 9 227(84.07%) 9 227(84.07%)
Iris 3 145(96.67%) 3 146(97.33%) 3 145(96.67%) 3 145(96.67%)
Wine 7 174(97.75%) 7 176(98.87%) 7 174(97.75%) 7 174(97.75%)
of the proposed algorithm was tested using various
benchmark datasets from UCI Machine Learning
Repository. The proposed algorithm gave very
efficient results in all instances and the significance
of the solution of the clustering problem by the
proposed algorithm is proved by the fact that the
percentage of the correct clustered samples is very
high and in some instances is larger than 97% and
by the fact that the instances with the largest number
of features gave better results when the Memetic-
GRASP algorithm was used.
ACKNOWLEDGEMENTS
This work is a deliverable of the task KP_26 and is
realized in the framework of the Operational
Programme of Crete, and it is co-financed from the
European Regional Development Fund (ERDF) and
the Region of Crete with final recipient the General
Secretariat for Research and Technology.~
REFERENCES
Aha, D.W., and Bankert, R.L., 1996. A Comparative
Evaluation of Sequential Feature Selection
Algorithms. In Artificial Intelligence and Statistics,
Fisher, D. and J.-H. Lenx (Eds.). Springer-Verlag,
New York.
Azzag, H., Venturini, G., Oliver, A., Gu, C., 2007. A
Hierarchical Ant Based Clustering Algorithm and its
Use in Three Real-World Applications, European
Journal of Operational Research, 179, 906-922.
Cano, J.R., Cordón, O., Herrera, F., Sánchez, L., 2002. A
GRASP Algorithm for Clustering, In IBERAMIA
2002, LNAI 2527, Garijo, F.J., Riquelme, J.C. and M.
Toro (Eds.). Springer-Verlag, Berlin Heidelberg, 214-
223.
Cantu-Paz, E., Newsam, S., Kamath C., 2004. Feature
Selection in Scientific Application, In Proceedings of
the 2004 ACM SIGKDD International Conference on
Knowledge Discovery and Data Mining, 788-793.
Chu, S., Roddick, J., 2000. A Clustering Algorithm Using
the Tabu Search Approach with Simulated Annealing.
In Data Mining II-Proceedings of Second
International Conference on Data Mining Methods
and Databases, Ebecken, N. and C. Brebbia (Eds.).
Cambridge, U.K., 515-523.
ICEIS 2008 - International Conference on Enterprise Information Systems
42

Dorigo, M, Stützle, T., 2004. Ant Colony Optimization. A
Bradford Book, The MIT Press, Cambridge,
Massachusetts, London, England.
Feo, T.A., Resende, M.G.C., 1995. Greedy Randomized
Adaptive Search Procedure, Journal of Global
Optimization, 6, 109-133.
Glover, F., 1989. Tabu Search I, ORSA Journal on
Computing, 1 (3), 190-206.
Glover, F., 1990. Tabu Search II, ORSA Journal on
Computing, 2 (1), 4-32.
Goldberg, D. E., 1989. Genetic Algorithms in Search,
Optimization, and Machine Learning, Addison-
Wesley Publishing Company, INC. Massachussets.
Holland, J.H., 1975. Adaptation in Natural and Artificial
Systems, University of Michigan Press, Ann Arbor,
MI.
Jain, A., Zongker D., 1997. Feature Selection: Evaluation,
Application, and Small Sample Performance, IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 19, 153-158.
Jain, A.K., Murty, M.N., Flynn, P.J., 1999. Data
Clustering: A Review, ACM Computing Surveys, 31
(3), 264-323.
Kao, Y., Cheng, K., 2006. An ACO-Based Clustering
Algorithm, In ANTS 2006, LNCS 4150, M. Dorigo et
al. (Eds.). Springer-Verlag, Berlin Heidelberg, 340-
347.
Kennedy, J., Eberhart, R., 1995. Particle swarm
optimization. In Proceedings of 1995 IEEE
International Conference on Neural Networks, 4,
1942-1948.
Kennedy, J., Eberhart, R., 1997. A discrete binary version
of the particle swarm algorithm. In Proceedings of
1997 IEEE International Conference on Systems,
Man, and Cybernetics, 5, 4104-4108.
Kennedy, J., Eberhart, R., Shi, Y., 2001. Swarm
Intelligence. Morgan Kaufmann Publisher, San
Francisco.
Li, Z., Tan, H.-Z., 2006. A Combinational Clustering
Method Based on Artificial Immune System and
Support Vector Machine, In KES 2006, Part I, LNAI
4251, Gabrys, B., Howlett, R.J. and L.C. Jain (Eds.).
Springer-Verlag Berlin Heidelberg, 153-162.
Liao, S.-H., Wen, C.-H., 2007. Artificial Neural Networks
Classification and Clustering of Methodologies and
Applications – Literature Analysis from 1995 to 2005,
Expert Systems with Applications, Vol. 32, pp. 1-11.
Liu, Y., Liu, Y., Wang, L., Chen, K., 2005. A Hybrid
Tabu Search Based Clustering Algorithm, In KES
2005, LNAI 3682, R. Khosla et al. (Eds.). Springer-
Verlag, Berlin Heidelberg, 186-192.
Marinakis, Y., Migdalas, A., Pardalos, P.M., 2005.
Expanding Neighborhood GRASP for the Traveling
Salesman Problem, Computational Optimization and
Applications, 32, 231-257.
Marinakis Y., Marinaki, M., Doumpos, M., Matsatsinis,
N., Zopounidis, C., 2007. Optimization of Nearest
Neighbor Classifiers via Metaheuristic Algorithms for
Credit Risk Assessment, Journal of Global
Optimization, (accepted).
Mirkin, B., 1996. Mathematical Classification and
Clustering, Kluwer Academic Publishers, Dordrecht,
The Netherlands.
Moscato, P., Cotta C., 2003. A Gentle Introduction to
Memetic Algorithms. In Handbooks of Metaheuristics,
Glover, F., and G.A., Kochenberger (Eds.). Kluwer
Academic Publishers, Dordrecht, 105-144.
Paterlini, S., Krink, T., 2006. Differential Evolution and
Particle Swarm Optimisation in Partitional Clustering,
Computational Statistics and Data Analysis, 50,
1220-1247.
Ray, S., Turi, R.H., 1999. Determination of Number of
Clusters in K-means Clustering and Application in
Colour Image Segmentation. In Proceedings of the 4th
International Conference on Advances in Pattern
Recognition and Digital Techniques (ICAPRDT99),
Calcutta, India.
Resende, M.G.C., Ribeiro, C.C., 2003. Greedy
Randomized Adaptive Search Procedures. In
Handbooks of Metaheuristics, Glover, F., and G.A.,
Kochenberger (Eds.). Kluwer Academic Publishers,
Dordrecht, 219-249.
Rokach, L., Maimon, O., 2005. Clustering Methods, In
Data Mining and Knowledge Discovery Handbook,
Maimon, O. and L. Rokach (Eds.). Springer, New
York, 321-352.
Shen, J., Chang, S.I., Lee, E.S., Deng, Y., Brown, S.J.,
2005. Determination of Cluster Number in Clustering
Microarray Data, Applied Mathematics and
Computation, 169, 1172-1185.
Sheng, W., Liu, X., 2006. A Genetic k-Medoids
Clustering Algorithm, Journal of Heuristics, 12, 447-
466.
Shi, Y., Eberhart, R. 1998. A modified particle swarm
optimizer. In Proceedings of 1998 IEEE World
Congress on Computational Intelligence, 69-73.
Sun, J., Xu, W., Ye, B., 2006. Quantum-Behaved Particle
Swarm Optimization Clustering Algorithm, In ADMA
2006, LNAI 4093, Li, X., Zaiane, O.R. and Z. Li
(Eds.). Springer-Verlag, Berlin Heidelberg, 340-347.
Xu, R., Wunsch II, D., 2005. Survey of Clustering
Algorithms, IEEE Transactions on Neural Networks,
16 (3), 645-678.
Yang, Y., Kamel, M.S., 2006. An Aggregated Clustering
Approach Using Multi-Ant Colonies Algorithms,
Pattern Recognition, 39, 1278-1289.
Yeh, J.-Y., Fu, J.C., 2007. A Hierarchical Genetic
Algorithm for Segmentation of Multi-Spectral Human-
Brain MRI, Expert Systems with Applications,
doi:10.1016/j.eswa.2006.12.012.
Younsi, R., Wang, W., 2004. A New Artificial Immune
System Algorithm for Clustering, In IDEAL 2004,
LNCS 3177, Z.R. Yang et al. (Eds.). Springer-Verlag,
Berlin Heidelberg, 58-64.
A MEMETIC-GRASP ALGORITHM FOR CLUSTERING
43
