
COMPONENT-BASED SUPPORT FOR KNOWLEDGE-BASED
SYSTEMS
Sabine Moisan
INRIA, BP 93, 06902 Sophia Antipolis, France
Keywords:
Software engineering, components, frameworks, knowledge-based systems, inference engines.
Abstract:
Software development of knowledge-based systems is difficult. To alleviate this task we propose to apply
software engineering techniques. This paper investigates BLOCKS, a component framework for designing
and reengineering knowledge-based system inference engines. BLOCKS provides reusable building blocks
common to various engines, independently on their taskor application domain. It has been used to build several
engines for various tasks (planning, classification, model calibration) in different domains. The approach
appears well fitted to knowledge-based system generators; it allows a significant gain in time, as well as it
improves software legibility and safeness.
1 MOTIVATION
Our objective is to facilitate operational knowledge-
based system (KBS) implementation and evolution.
Knowledge-based systems are mainly composed of
three parts: a knowledge base storing expertise in a
particular domain, a fact base containing facts about
an end-user problem in this domain, and an engine,
written by a software designer, performing inferences
to solve the end-user problem based on the expert
knowledge. For instance, if the task is to classify ob-
jects within a taxonomy, the knowledge base contains
a description of the class hierarchy and features, the
fact base a set of observed features concerning yet un-
classified objects, and the engine implements an algo-
rithm that infers the classes of the objects by travers-
ing the class hierarchy.
Building a KBS means to develop all the tools for
both experts and end-users to interact with the system,
such as inference engine, knowledge representation
schemes, knowledge editors/verificators, etc. Each
element by itself represents a great amount of code.
Moreover, all elements must work together, although
every one may evolve independently. So, not only
developing new KBSs but also modifying them is a
software engineering challenge. For both activities,
designers have to convert a cognitive model, as ex-
pressed by experts, into a software model and eventu-
ally an operational system. This implies to bridge a
large conceptual gap and recent software engineering
techniques seem good candidates to support this task.
Indeed, KBS software designers have little adapted
support, much effort has been devoted to facilitate ex-
perts and end-users’ tasks. Since the major modifica-
tions usually concern engines (changes in reasoning
strategy) we focus this paper on a solution to allow
easier building and reconfiguration of KBS engines
by means of an extensible and reusable component
framework.
For a long time now, frameworks have been con-
sidered as a powerful tool for designing and build-
ing complex software systems in a rather economi-
cal and flexible way. Following this line, our frame-
work, named BLOCKS, provides designers with build-
ing blocks to create engines at a level of abstraction
higher than ordinary programminglanguages. It helps
cope with model changes, ensuring programming se-
curity and rapid code production. Moreover, it pro-
vides a way to compare different reasoning strategies.
After this introduction, section 2 describes our
meta approach to the KBS life cycle. Section 3 details
different engines developed for three different tasks.
Finally section 4 compares our approach with some
others, before concluding.
2 BEYOND KBS GENERATORS
Each knowledge-based system realizes a problem-
solving task such as planning, classification, diagno-
sis, etc. Depending on target problems, on expert
purposes or on implementation requirements, differ-
ent versions of the same task may be necessary. Over
295
Moisan S. (2008).
COMPONENT-BASED SUPPORT FOR KNOWLEDGE-BASED SYSTEMS.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - AIDSS, pages 295-300
DOI: 10.5220/0001702702950300
Copyright
c
SciTePress

the time, domain evolutions also necessitate a series
of versions for the same task.
For a given range of problem solving tasks, there
exist commonalities, such as specific knowledge or-
ganization or contents. Sharing those commonalities,
to a certain extend, has been the purpose of KBS gen-
erators or shells. Generators provide a panel of com-
mon elements to design a KBS, namely inference en-
gine, knowledge representation schemes, verification
tools, and various editors. Except for general rule-
based shells (such as Jess), most generators are more
or less dedicated to a given range of applications or to
a given task. Such specialized generators are closer to
expert ways of reasoning and often lead to more ef-
ficient KBSs. Generators properly meet expert mod-
ification needs at the cognitive level, since they sup-
port modification and maintenance of knowledge base
contents and, to some respect, minor modification in
reasoning strategies. At the software level however,
when new functionalities are required in one of the
elements provided by a generator, modifications are
difficult, since important features are often hidden in-
side different pieces of code.
To improve code flexibility, we propose a “meta
generator” approach to go one step further and to en-
able the reuse and extension of each element provided
by a generator, i.e. inference engine, interface, knowl-
edge base description language, knowledge verifica-
tion tool, etc. This approach is implemented in a soft-
ware platform, named LAMA which gathers several
generic extensible toolkits to design, test, and mod-
ify these software elements. The platform provides
a unified environment to design or to modify gener-
ators and to tune variants of them in order to fulfill
specific requirements. The focus of this paper is the
component framework for engine design, which is de-
tailed below, but the platform also offers a framework
for customising expert level languages, a framework
for graphic user and expert interfaces and a library
for knowledge verification. We mainly rely on frame-
works to provide high level tested software architec-
tures and implementations for each KBS element.
2.1 The BLOCKS Framework
BLOCKS is the core of the platform. It is an object-
oriented framework, in the sense of (Johnson, 1997),
written in C++, and rooted in our extensive experience
of the design of various KBS generators for computer
aided design, classification, or planning, in domains
as different as civil engineering, astronomy, medicine,
or biology. Briefly, components in BLOCKS corre-
spond to interrelated classes, and more precisely to
roots of class hierarchies. The structure of these (ab-
stract) classes form patterns for describing the con-
cepts involved in a task; generic functions or (ab-
stract) methods of these classes constitute a kernel of
basic instructions that can be redefined to implement
a reasoning strategy. Designers can thus reuse or ex-
tend both the set of concepts or the algorithmic ca-
pabilities. These two aspects are of course strongly
connected and have to be modified accordingly.
BLOCKS is composed of a common general layer
and several task specific layers on top of it. The gen-
eral layer consists of about 75 classes that implement
generic features useful for a large range of KBSs: e.g.,
inference rules, structured frames, or history manage-
ment. By specializing classes in the general layer, a
designer may define task-customized layers to imple-
ment adapted task models. These layers contain only
concrete classes, the instances of which will populate
the knowledge bases, and methods or functions that
will constitute reasoning steps in the algorithm of an
engine strategy.
The proper generality level of the components
was an important issue during our domain analysis.
BLOCKS is not reduced to unsubstantial classes and
generic functions, but it offers structured classes with
rich behavior and relationships that reflect the usual
interactions between concepts in KBS engines. Class
interfaces are complete enough to covermost designer
needs without modifications, but points of flexibility
(hooks) have been foreseen, in particular in methods.
Specialization, composition and hooks allow design-
ers to fine tune engine behavior.
2.2 Use of BLOCKS for KBS Engines
As any class framework, BLOCKS not only supplies
concrete and abstract classes that can be derived
or composed, but also relationships among classes
that can be extended, generic functions that can be
parametrized by criteria (written as functions), and
(abstract) methods that can be redefined. It thus pro-
vides a global organization of the classes, relation-
ships, and functions that must be respected by design-
ers. Enforcing this point is an important issue, which
is outside the scope of this paper; it is addressed by
model-checking techniques (Moisan et al., 2004).
Figure 1 illustrates the way BLOCKS is to be used.
A designer implements a particular engine for a given
task (1) by picking the needed classes, methods and
functions from the general layer (or from an exist-
ing specific layer). The designer can reuse them “as
is”, compose or specialize them according to domain
requirements. These operational classes, methods or
functions are used to compose a new engine program
(2) that corresponds to the chosen strategy. Roughly
ICEIS 2008 - International Conference on Enterprise Information Systems
296

Figure 1: Generation of a KBS using BLOCKS.
speaking, each reasoning step in the engine corre-
sponds to a method or function call.
An expert can then feed this engine with knowl-
edge about his/her particular domain (3), guided
by the other tools provided by the designer (lan-
guage, editors...). Experts do not modify the en-
gine procedure. Through the expertise-oriented lan-
guage, they transparently introduce sub classes (do-
main concepts) and/or instances of the designer pro-
vided classes. This constitutes a knowledge base,
which complements the engine, providing an exe-
cutable knowledge-based system (4).
Then, end-users solve particular problems involv-
ing the given reasoning and expertise. End-users do
not create classes, nor can they modify the engine
strategy. They provide facts describing their problems
(5) and run the system over these problems. During
the execution, instances of the operational classes are
created, modified or deleted by the system. The final
result (6) ensues from the expertise and engine behav-
ior. For instance, if the task is classification, the end-
user problem is an object to classify and the result a
list of candidate classes with attached likelihoods.
3 ENGINE REALIZATIONS
Over the past decades BLOCKS was used to design
or modify different inference engines, for different
generators. First, we re-wrote existing systems, that
were initially developed from scratch; then, based on
promising results, we systematically used the frame-
work to develop new engines. We started by variants
of planning engines. This intensive code (re)writing
activity was the motivation of the platform approach.
Thus, the development of the framework and the de-
sign of these engines were conducted in parallel. We
then have addressed a completely different task, clas-
sification, resulting in two engines. In parallel, we de-
veloped a model calibration engine as an extension of
our work in planning. These three tasks led to specific
layers in BLOCKS.
Planning Engines. We have developed several
KBS engines for a task called program supervision
which consists in automating the use and correct com-
bination of existing programs. This task mainly re-
lies on planning techniques. It introduces the notions
of supervision operators—corresponding in our case
to programs or compositions of programs— that ma-
nipulate data (arguments of programs). Operators are
combined in a plan to achieve a processing goal. We
have developed a layer for this task and three variants
of engines, based on a initial engine, OCAPI (Cl´ement
and Thonnat, 1993), initialy written in Lisp.
The first variant, PEGASE, performs pure hierar-
chical planning, as OCAPI, though introducing new
operator and rule types. Thanks to this experience,
we were able to define an initial version of a planning
layer in BLOCKS. PEGASE has been successfully ap-
plied to domains such as galaxy identification in as-
tronomical imaging (Thonnat et al., 1995), or vehicle
detection in satellite imaging (Shekhar et al., 1997).
The second engine, MEDIA (Crub´ezy et al.,
1997), integrates dynamic planning steps. It extends
the planning layer of BLOCKS with new components,
such as a weak condition concept, and it also defines
more sophisticated rules. This experiment allowed us
to improve the platform and in particular to tune the
granularity of BLOCKS components for better reuse.
It is a typical example of successful reuse, the gain in
time had been dramatically demonstrated: developing
MEDIA took a PhD student two months (for the cod-
ing part, after analysis) and reused more than 90 % of
the components that were developed for PEGASE.
Finally, the PULSAR engine was an attempt to-
wards combining hierarchical and dynamic operator-
based planning methods. It provides a mechanism to
handle unordered compositions, a new type of oper-
ator composition. For hierarchical planning aspects,
it simply reused parts of the PEGASE engine. PUL-
SAR has been applied to road obstacle detection and
to medical imaging (van den Elst, 1996). It took a
PhD student four months to implement the PULSAR
engine and to test it on some examples. This is rea-
sonable considering the fact that it was our first plan-
ner containing a combination of hierarchical skeletal
and component based partial ordered planning, and
thus it implied recoding and debugging some func-
tionalities and data structures in the planning layer.
These engines share comon data structures and
functions from the program supervision and the gen-
COMPONENT-BASED SUPPORT FOR KNOWLEDGE-BASED SYSTEMS
297
eral layers. For instance, classes Supervision Opera-
tor or Data from program supervision layer are com-
mon to all three engines and generic function select
from the general layer is used in all engine reasoning
algorithm to select which planning operator to fire.
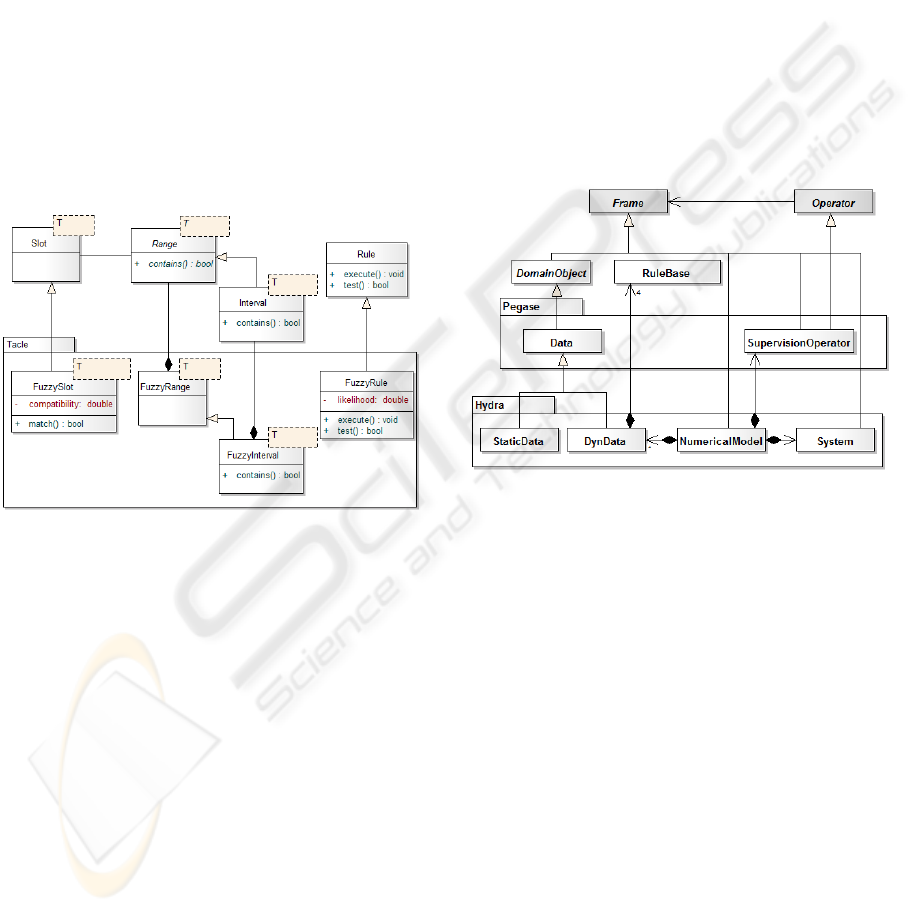
Classification Engines. Our first classification en-
gine, named TACLE, was a C++ implementation of
an previous Lisp engine. TACLE classifies an object
in a predefined taxonomy (hierarchical description of
all the possible classes of objects for a given domain).
This attempt to tackle a completely new task was our
first experiment in adding a new layer to BLOCKS.
This layer primarily introduces an implementation of
the theory of possibilities to take into account uncer-
tainty on object attribute values and on rules. Figure 2
shows a few classes using this theory that have been
derived from the BLOCKS general layer.
Figure 2: Some specializations for classification task.
It took us three months to implement it. TACLE
used (directly or by specialization, see Figure 2) more
than 85% of the general layer. It introduces 20 classes
(half of them being very simple), among which 14
derive from BLOCKS components. This experience
permitted us to fine tune the boundary between the
general layer and specialized ones.
More recently, in collaboration with INRA, an en-
gineer designed a new engine (OCEAN) to perform
semantic image interpretation, i.e. to assign a mean-
ing to data automatically extracted from images. This
task implies to combine both a program supervision
sub-task to plan image processing programs that ex-
tract interesting features, and a classification sub-task
to search matching features in a taxonomy. OCEAN
is still under construction. Up to now, we have intro-
duced 15 (new and derived) classes, plus 8 directly
reused from TACLE.
Model Calibration Engine. Model calibration is
an essential step in modeling physical processes by
means of mathematical equations. It consists in
adapting numerical parameters of equations with re-
spect to real measures, so that the simulation results
of the numerical model fits the ground truth. This task
shares a lot of concepts and reasoning steps with pro-
gram supervision. So it has been easy to move to
a new layer and a new engine (HYDRA) by special-
izing general layer items and reusing planning ones,
with some tuning (see Fig. 3). In total, this engine
introduces 13 classes and 9 major method definitions,
one for each new/modified reasoning step, plus a few
utilities. This engine was partly developed at Cema-
gref Lyon and tested in hydraulic model calibration,
on quite different cases of French rivers (Vidal et al.,
2005).
Figure 3: Major HYDRA class extensions.
Empirical Measures. The following table sum-
merizes some figures about three engines, one in each
task, just to give a rough idea about the coding effort
which is necessary to build a new engine. BLOCKS
itself is about 75 classes and 5,000 lines of C++
code (not including comments and support classes,
as lists, strings,...). This table raises some remarks.
First, PEGASE has been the most used of our engines,
and it is the only one with a sophisticated history
backtracking mechanism, hence its higher number of
code lines. It is likely that OCEAN once completed
will also reach similar complexity. On the other
hand, HYDRA, which reuses a lot from PEGASE,
necessitates less extra code. Second, the number of
classes that are to be developed (brand new ones or
derived from existing ones) is rather similar among
engines. Third, an engine reasoning part, that is the
algorithmics of its problem solving method, is on the
order of a few hundreds of lines, which is a tractable
size when it comes to modifications.
ICEIS 2008 - International Conference on Enterprise Information Systems
298
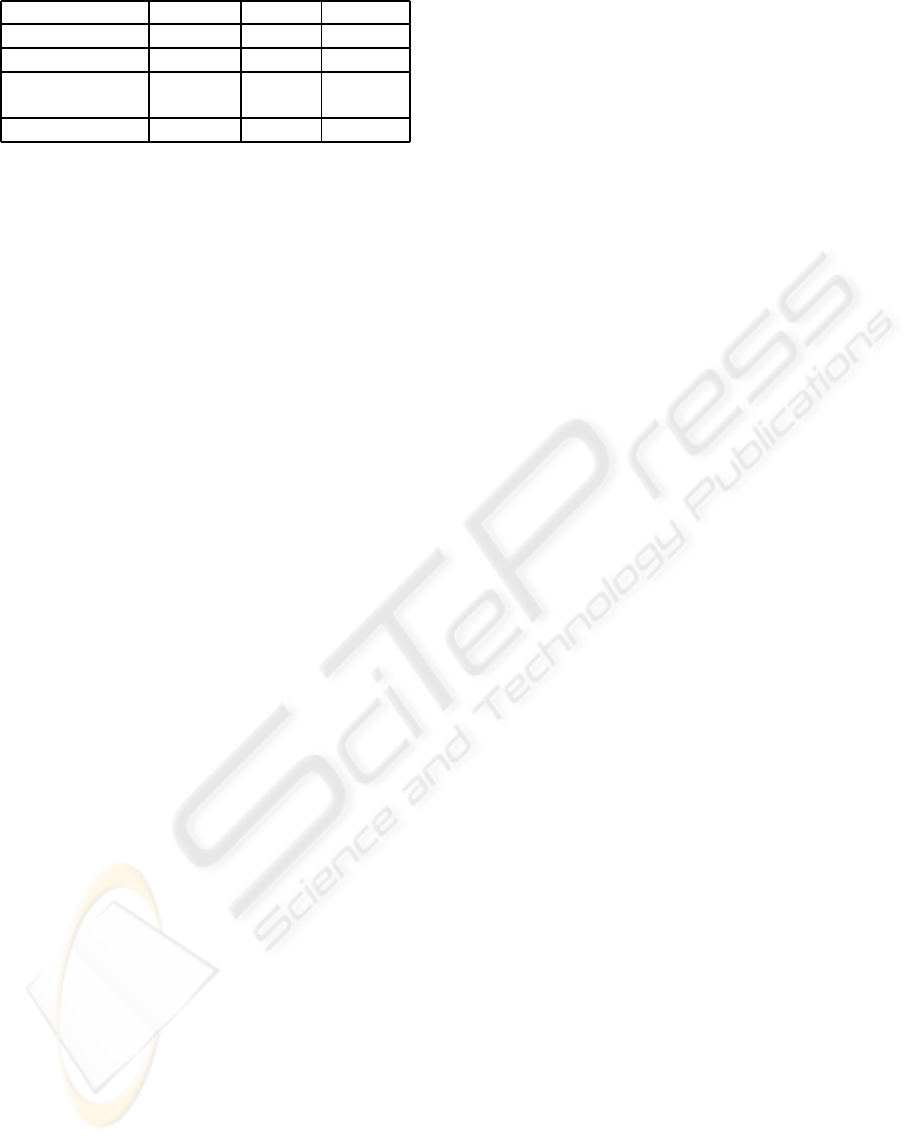
Engine PEGASE TACLE HYDRA
Derived classes 16 15 11
New classes 2 5 2
Lines of (real 3,000 2,000 1,500
C++) code
Reasoning part 850 150 250
4 RELATED WORK
The need to facilitate (re)writing of systems and to
provide environments supporting that purpose has led
to many works in Artificial Intelligence. These works
mainly rely on reusability and customization, but they
differ by the nature of what is reused or customized
and by the techniques they use.
Most of them are interested in reusing knowl-
edge itself (especially ontologies) or parts of reason-
ing strategies (termed problem solving methods). In
the knowledge acquisition community, reusability of-
ten targets ontology management and task modeling,
as in (Oussalah, 2003), PROT
´
EG
´
E (Gennari et al.,
2003), or Par-KAP (Nunes de Barros et al., 1997).
Their objective is to help design knowledge mod-
eling or knowledge acquisition tools, while we tar-
get reasoning KBSs. Following KADS (Schreiber
et al., 1999) most systems focus on formal abstract
models of ontologies and methods, whereas we pro-
pose reusable operational components. Technicaly,
customization can be made possible through abstract
component reuse, open-source approaches, as in Jess
shell, or plug-ins, as in PROT
´
EG
´
E. We rather rely on
class components to be composed or derived.
Tools have been proposed, that intend to
cover all steps of a KBS design (from cogni-
tive model to implementation or simulation). We
can cite DSTM (Trichet and Tchounikine, 1999),
UPML (Fensel et al., 2003) or TASK (Talon and
Pierret-Golbreich, 1996) that are dedicated to KBS
design. Although such tools provide means to
specify a KBS and even if they propose code
implementation—by automatic translation of formal
models— they do not offer real software development
tools to designers of KBSs. In this sense they stand
upstream from BLOCKS which promotes a software
level composition of engine strategies from reusable
operational components. We have started to study in-
teroperability with some of these tools, relying for in-
stance on standardized knowledge formats.
Some frameworks and libraries relying on com-
ponent engineering more concerned with implemen-
tation issues exist, but they do not target knowledge-
based systems; for instance, frameworks have been
developed for agent platforms (Briot et al., 2002) or
for learning tools, e.g., MLC++ (Kohavi et al., 1994)
or WEKA (Witten et al., 1999).
Other systems address parts of the BLOCKS gen-
eral layer or specific layers. In the first category we
can cite the AROM platform (Page et al., 2001) for
knowledge base edition which is close to the knowl-
edge representation part of BLOCKS. In the second
category, we find frameworks such as ASPEN (Chien
et al., 2000)dedicated to planning/schedulingsystems
for space mission operations. Such frameworks rather
correspond to a specific layer of BLOCKS without the
notion of a general layer comon to several tasks.
This general layer is however important, it can
be viewed as a meta-model of KBSs, based on well-
established concepts to serve as the basis of KBS de-
velopment. It can be compared to the UML Profile
proposed in (Abdullah et al., 2007) or to the JavaDON
architecture (Tomic et al., 2006). Both stand at he
same meta level of KBS representation as BLOCKS
also with a clear software engineering perpective. A
main difference is that both rely uniquely on rules as
inference mechanism, when we propose to mix a rule
engine with other ones (e.g., planning or classifica-
tion ones). There are also a few differences in goals
(stress on Web applications for JavaDON), methods
(UML profiling or open-source), or achievements (no
code generation from UML Profile yet).
5 CONCLUSIONS
We propose to use software engineering techniques
to improve knowledge-based system design. In par-
ticular, we have investigated a reusable and adapt-
able component framework to design KBS engines.
The BLOCKS frameworkprovides the necessary com-
ponents for high-level design and implementation of
(variantsof) engines, based on reuse, composition and
refinement. Yet, genericity is not at the expense of
efficiency: for instance in a video understanding ap-
plication, a planning engine generated with BLOCKS
provides high versatility but accounts for less that 4%
of the overall execution time. Our objective was op-
erational code reuse, not only (formal) model reuse.
This approach has proved well fitted to knowledge-
based system engines and led to a significant gain in
development time and in code readability. It has sub-
stantially simplified the creation of newengines, com-
pared to previous implementations from scratch.
We are currently adapting BLOCKS components
to support distributed knowledge-based systems and
real-time performances, as needed by more and more
applications. We use agent-based architecture and
concurrent programming for these purposes. On a
COMPONENT-BASED SUPPORT FOR KNOWLEDGE-BASED SYSTEMS
299

methodological side, we intend to investigate model
driven engineering, to promote a seamless process
from specification to realization of complex systems,
by means of model transformations.
REFERENCES
Abdullah, M. S., Paige, R., Kimble, C., and Benest, I.
(2007). A UML Profile for Knowledge-Based Sys-
tems Modelling. In SERA’07: Proceedings of the 5th
ACIS International Conference on Software Engineer-
ing Research, Management & Applications (SERA
2007), pages 871–878, Washington, DC, USA. IEEE
Computer Society.
Briot, J.-P., Charpentier, S., Marin, O., and Sens, P. (2002).
A Fault-Tolerant Multi-Agent Framework. In Inter-
national Joint Conference on Autonomous Agents and
Multiagent Systems, Bologna Italy. ACM.
Chien, S., Rabideau, G., Knight, R., Sherwood, R., Engel-
hardt, B., Mutz, D., Estlin, T., Smith, B., Fisher, F.,
Barrett, T., Stebbins, G., and Tran, D. (2000). ASPEN
- Automated planning and scheduling for space mis-
sion operations. In 6th International Symposium on
Space missions Operations and Ground Data Systems
(SpaceOps 2000).
Cl´ement, V. and Thonnat, M. (1993). A Knowledge-
based Approach to the Integration of Image Process-
ing Procedures. Computer Vision, Graphics and Im-
age, 57(2):166–184.
Crub´ezy, M., Aubry, F., Moisan, S., Chameroy, V., Thon-
nat, M., and di Paola, R. (1997). Managing Complex
Processing of Medical Image Sequences by Program
Supervision Techniques. In SPIE International Sym-
posium on Medical Imaging, Newport Beach, Califor-
nia USA.
Fensel, D., Motta, E., van Harmelen, F., Benjamins, R.,
Crubezy, M., Decker, S., Gaspari, M., Groenboom,
R., Grosso, W., Musen, M., Plaza, E., Schreiber,
G., Studer, R., and Wielinga, B. (2003). The
Unified Problem-Solving Method Development Lan-
guage UPML. Knowledge and Information Systems,
5(1):83–131.
Gennari, J., Musen, M., Fergerson, R., Grosso, W.,
Crubezy, M., Eriksson, H., Noy, N., and Tu, S.
(2003). The Evolution of Prot´eg´e: An Environment
for Knowledge-Based Systems Development. Int.
Journal of Human-Computer Studies, 58:89–123.
Johnson, R. E. (1997). Frameworks = (Components + Pat-
terns). CACM, 10(40):39–42.
Kohavi, R., John, G., Long, R., Manley, D., and Pfleger, K.
(1994). M L C + +: A Machine Learning Library in
C++. In Tools with Artificial Intelligence.
Moisan, S., Ressouche, A., and Rigault, J.-P. (2004).
Towards Formalizing Behavorial Substitutability in
Component Frameworks. In 2nd International Con-
ference on Software Engineering and Formal Meth-
ods, pages 122,131, Beijing, China. IEEE Computer
Society Press.
Nunes de Barros, L., Hendler, J., and Benjamins, V. (1997).
Par-KAP: a Knowledge Acquisition Tool for Building
Practical Planning Systems. In M.E. Pollack, editor,
15th International Joint Conference on Artificial In-
telligence (IJCAI’97), pages 1246–1251.
Oussalah, M. (2003). Reuse in KBS: a compo-
nents approach. Expert Systems with Applications,
24,(2):173–181.
Page, M., Gensel, J., Capponi, C., Bruley, C., Genoud, P.,
Zibelin, D., Bardou, D., and Dupierris, V. (2001). A
New Approach in Object-Based Knowledge Repre-
sentation: the AROM System. In EA/AIE’2001, Bu-
dapest, Hungary.
Schreiber, G., Wielinga, B., and Breuker, J. (1999). KADS:
A Principled Approach to Knowledge-Based System
Development. Academic Press, London.
Shekhar, C., Burlina, P., and Moisan, S. (1997). Design
of Self-Tuning IU Systems. In DARPA Image Under-
standing Workshop, volume 1, pages 529–536, New
Orleans, LA.
Talon, X. and Pierret-Golbreich, C. (1996). TASK: from the
specification to the implementation. In 8th Interna-
tional Conference on Tools with Artificial Intelligence
- ICTAI.
Thonnat, M., Cl´ement, V., and Ossola, J. C. (1995). Auto-
matic Galaxy Description. Astrophysical Letters and
Communication, 31(1-6):65–72.
Tomic, B., Jovanovic, J., and Devedzic, V. (2006). Javadon:
an open-source expert system shell. Expert Syst.
Appl., 31(3):595–606.
Trichet, F. and Tchounikine, P. (1999). DSTM: a Frame-
work to Operationalize and Refine a Problem-Solving
Method Modeled in terms of Tasks and Methods. In-
ternational Journal of Expert Systems With Applica-
tions (ESWA), 16(2):105–120.
van den Elst, J. (1996). Mod´elisation de Connais-
sances pour le Pilotage de Programmes de Traitement
d’Images. PhD thesis, Universit´e de Nice.
Vidal, J.-P., Moisan, S., Faure, J.-B., and Dartus, D. (2005).
Towards a Reasoned 1-D River Model Calibration.
Journal of Hydroinformatics, 7(2):79–90.
Witten, I., Frank, E., Trigg, L., Hall, M., Holmes, G., and
Cunningham, S. (1999). Weka: Practical machine
learning tools and techniques with Java implementa-
tions. In ICONIP/ANZIIS/ANNES’99 Int. Workshop:
Emerging Knowledge Engineering and Connectionist-
Based Info. Systems, pages 192–196.
ICEIS 2008 - International Conference on Enterprise Information Systems
300
