
USING VARIANTS IN KAOS GOAL MODELLING
Joël Brunet, Farida Semmak, Régine Laleau
LACL (Laboratoire d'algorithmique, complexité et logique), Université Paris XII
61 av Général de Gaulle 94000 Créteil, France
Christophe Gnaho
Université Paris V, 45 rue des Saints-Pères, 75006 Paris, France
Keywords: Goal modelling, variability, requirements engineering.
Abstract: In this paper we apply a certain kind of variability in KAOS goal and responsibility models: links can be
conditioned depending on the choice of variants. These variants are grouped in facets and organized in a
variant tree having a metagraph semantics: instances are all the goal/responsibility graphs generated when
all variants are fixed. We use a case study from the land transportation domain: a simplified cycab (or
cybercar) with some variants. The overall case study is part of the ANR TACOS project, whose final aim is
to define a component-based approach to specify systems with high-level safety requirements.
1 CONTEXT
Poor requirements have been recognized to be a
major cause of software problems such as cost
overrun, delayed delivery or failure to meet
expectations (The Standish Group, 1995). The
problem gets even more serious in the case of safety-
critical or security systems; most severe failures
have been recognized to be traceable back to
defective specification of requirements (Lutz, 1993),
(Safety-Critical Systems, 2002). In order to take into
account these important limitations, Goal-Oriented
Requirements Engineering (GORE) is concerned
with the elicitation of the goals to be achieved by the
system envisioned – WHY – issues, the operationali-
zation of goals into specifications of services and
constraints – WHAT issues –, and the assignment of
responsibilities to agents such as humans, devices
and software pieces available or to be developed –
WHO issues – (van Lamsweerde, 2003). Paradigms
using the goal concept have been proposed by
several approaches: KAOS (
Dardenne, 1993), I* (Yu,
1997), CREWS (Rolland, 1998). We choose the
KAOS approach for different reasons including the
presence of the Objectiver CASE tool and a certain
effectiveness of the approach.
The work presented in this paper is part of the
TACOS project (Trustworthy Assembling of
Components: frOm requirements to Specification,
funded by the French Research Agency – Agence
Nationale de la Recherche – under the ANR-06-
SETI-017 reference), which started in January 2007,
and whose aim is to define an engineering process
beginning with functional and non-functional goals
and ending with formal specifications organized as
components that check some properties like security,
efficiency, fault tolerance, interoperability, etc. Land
transportation has been chosen as the application
domain of the project. More specifically we focus on
the new transportation systems named cybercars or
cycabs, that were and are always the subject of
several research projects, such as CyberCars and
Cybermove (Cybercar projects).
In this paper, we study how a certain kind of
variability – called by us variant trees – can be used
in KAOS goal models. We illustrate our approach on
a simplified cycab case study that could be summed
up as follows (many assumptions are still left open,
some of them will be treated by introducing some
variants).
Simplified Cycab Case Study. We consider a unique
cycab, filoguided on a dedicated road and servicing
a succession of stations where passengers can get in
and get off. After the last station, the cycab goes to
the first one (because it is on a circular road). The
cycab cannot turn round.
339
Brunet J., Semmak F., Laleau R. and Gnaho C. (2008).
USING VARIANTS IN KAOS GOAL MODELLING.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - ISAS, pages 339-344
DOI: 10.5220/0001709103390344
Copyright
c
SciTePress

From our point of view, the purpose of variability is
to consider and represent the large diversity of
options a given application of a given domain may
take. Variability has already been studied in the
domain of software product lines (
van Gurp, 2001)
(Halmans, 2003)
. It can be defined as the ability of an
element (component, system, model…) to be
changed, personalized and configured according to a
specific context. Bachmann and Bass (2001) propose
to classify variability into several categories
(functions, data, technology...). Halmans and Pohl
distinguish between essential variability for
functional and non-functional needs and technical
variability for implementation. Variability is
represented in (Jacobson, 1997) and (Halmans,
2003) by variation points and variants on use cases:
a variation point defines a point in the model where
variation occurs, whereas a variant is a manner of
realizing variability. Moreover, mechanisms such as
optionality, alternative and optional alternative to
organise them are used (Bachmann, 2001),
(Halmans, 2003).
Variability has also been studied in domain
analysis. Among domain analysis methods (Arango,
1994), the FODA method (Kang, 1998) has been the
first one to propose the concept of feature, defined
as a prominent or distinctive user-visible aspect,
quality or characteristic of a software system or
systems. The feature model highlights, in the form of
hierarchy sets, the characteristics that discriminate
systems in a domain. Other approaches study
variability at an early requirement engineering step.
In Crews project (Bennasri, 2004), task and
strategies alternatives are defined in labelled
directed graphs called maps (Rolland, 1998), that
provide support in alternative selection through
guidelines. In (Liaskos, 2006), variability is tackled
through OR decomposition of goals, by stating
variability concerns that use semantic frames based
on linguistic invariants, and with a mechanism of
background variability. This mechanism allows to
describe characteristics of agents, locations and
objects of the domain, that may lead to identify
additional alternatives. A survey of variability in
requirement engineering can be found in (Liaskos,
2007).
The originality of our approach is to apply
variability to goals, not only to analysis, design or
programming products. Our approach of variability
is in continuation of our previous work (Semmak,
2005), (Semmak, 2006) except that we now use a
well-known goal approach (KAOS) rather than a
specific one.
In section 2 we introduce the notion of variant that
seems necessary in respect with our objectives. We
apply it on goal and responsibility models and
sketch out the impacts on the other KAOS models.
In section 3 we group together variants in facets,
organize them in a tree called variant model or
graph, and present a metamodel to relate variant
models with goal models. Finally we conclude in
section 4.
2 VARIANTS
2.1 Variants applied to Goal Models
In KAOS, a goal can be reduced by AND
decomposition; that means that all the subgoals are
necessary to satisfy a goal. Moreover, a goal may be
reduced by OR decomposition that allows several
alternatives to satisfy a goal to be stated. It is
important to observe that OR decompositions are
placed before AND decompositions: we can say that
a goal is satisfied either by this set of subgoals or by
this other one. If we want the contrary, we must
introduce intermediary goals: a goal is achieved by
the satisfaction of all its subgoals, each of them
being possibly decomposed with alternatives.
Another remark is that alternatives may be needed
not only for low-level goals but also for abstract soft
goals. For instance, if we study all kinds of public
libraries, we can find some public libraries that
allow documents to be consulted and borrowed,
while others allow only documents to be consulted
or only documents to be borrowed. Thus, a root goal
“documents put at disposal” may be reduced by
an OR decomposition with the subgoals
“documents put in consultation” and
“documents put in borrowing”. Each of these
subgoals will share some common subgoals such as
“documents managed”, that is the reason why
goal models are not trees even if there is a root: they
just are oriented graphs with a root.
In order to justify the introduction of the variant
concept, we may highlight that some variations in
the requirements cannot be simply represented by
alternatives, because it may have an impact on
different parts of the goal graph. By using an
alternative, it seems that what we can only do is to
determine the smallest subgraph that contains all the
impacts of the variation, to duplicate this subgraph,
to introduce the variations on one of them, and to
link both of them with an OR link to their parent
goal. When several variations are introduced in the
requirements, this mechanism leads quickly to
ICEIS 2008 - International Conference on Enterprise Information Systems
340
combinatory explosion in goal models, not in terms
of goals but in terms of links between goals. One can
easily imagine that only a few variations can be
represented if we want to keep the goal model
readable.
Thus, we argue that the notion of variant, that we
define as some requirement that may or may not be
included in the final set of requirements we want to
be satisfied by our future system, can produce a
more simple goal model by “factorizing” identical
links between several variants.
For instance, let us consider the following
variants concerning the moving mode of the cycab:
it can either be automatic (for instance a subway
stopping at every station) or on demand (it stops at a
station only if there is an external or internal
demand, such as an elevator). In order to annotate
the goal model while preserving clarity, we associate
boolean variables to these variants: respectively
AUTOMOV (automatic moving) and ONDEMMOV
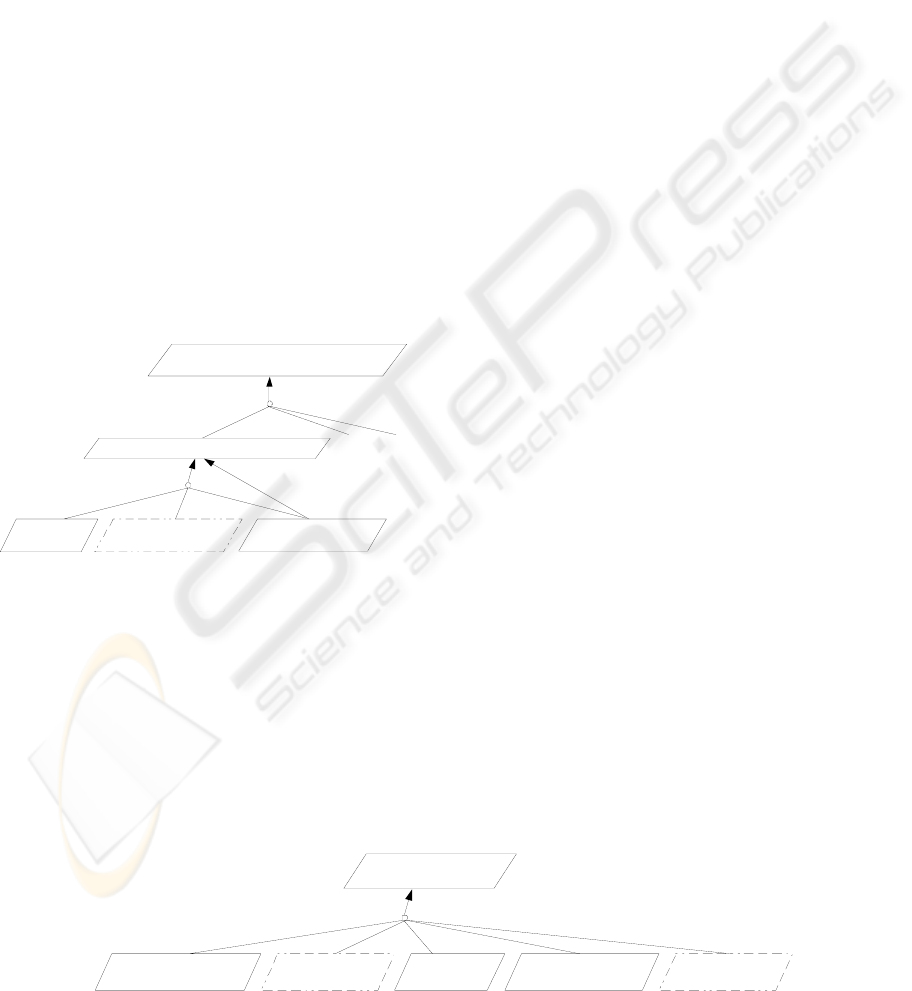
(on demand moving). Figure 1 presents the main
part of the goal model of the case study. The
semantics of a variable affected to a link is: the link
is valid if and only if the value of the variable is true.
Cycab transportation requests satisfied in
a safe, efficient, usable and cheap way
Cycab transportation requests satisfied
... ...
Transportation
requested
Transportation request
not cancelled
Passengers brought to
their destination
[ONDEMMOV]
[AUTOMOV]
Figure 1: Root goal model of the cycab case study.
Commentaries: the dashed box is for an hypothesis;
we do not use a specific notation to distinguish
between goals and requirements because the latter
may be identified by their attached responsible agent
(when all of them are affected); the suspension
points are for non-functional goals.
In natural language, the goal “Transportation
requested” and its corresponding hypothesis are
only relevant for the variant On demand moving.
One can obviously object that, in figure 1, our
variant notion is not necessary: it may be tackled by
an alternative. We agree, but it gives a semantics to
the alternative because, as we will see later, variants
may be organized and documented. Moreover there
is a more important reason: if a variant has a
consequence in another part of the graph, what we
just have to do is to use the same variable to
condition a new link. For instance in figure 2, when
the goal “Passengers brought to destination” is
reduced, we find a new impact of these variants: the
subgoal “Destination selected” has a meaning only
if the variant On demand moving is selected.
In this example we can see that if an alternative
decomposition is used, the number of links in the
graph will almost double (if we enumerate distinctly
the aggregate part of the links and their membership
parts, that are respectively above and under the
blank circle). It seems useful to place variants either
in the aggregate part of an AND link or in the
membership part of it, despite the fact that they
could be put only in the membership parts. We
prefer not to be restricted to that for the reason of
model readability: for instance on figure 1 the
second member of the alternative should be deleted
and the two first subgoals should be conditioned
with the variant [ONDEMMOV], while the variant
[AUTOMOV] disappears.
2.2 Variants applied to Responsability
Models
In order to experiment the approach on the
responsibility model, we have been interested in
other variants: the driving mode, either automatic
(control driving system) or manual (human driver),
and the system chosen for opening and closing the
doors of a cycab, that could be either automatic or
manual (in a simplified approach). We associate to
these four variants the respective boolean variables
AUTODRIVE, MANDRIVE, AUTODOOR,
MANDOOR.
The impact of these variants is shown in the two
following figures. The semantics of the annotation
of a responsibility link with a variant is similar to the
one on a goal reduction link in the previous section:
if the variant is true, the responsibility link is either
Cycab put at disposal
at the calling station
Passenger inside
the cycab
Vehicule brought to
destination
[ONDEMMOV]
Passengers brought
to their destination
Passenger outside
the cycab
Destination
selected
Figure 2: Goal submodel of the goal Passengers brought to destination.
USING VARIANTS IN KAOS GOAL MODELLING
341
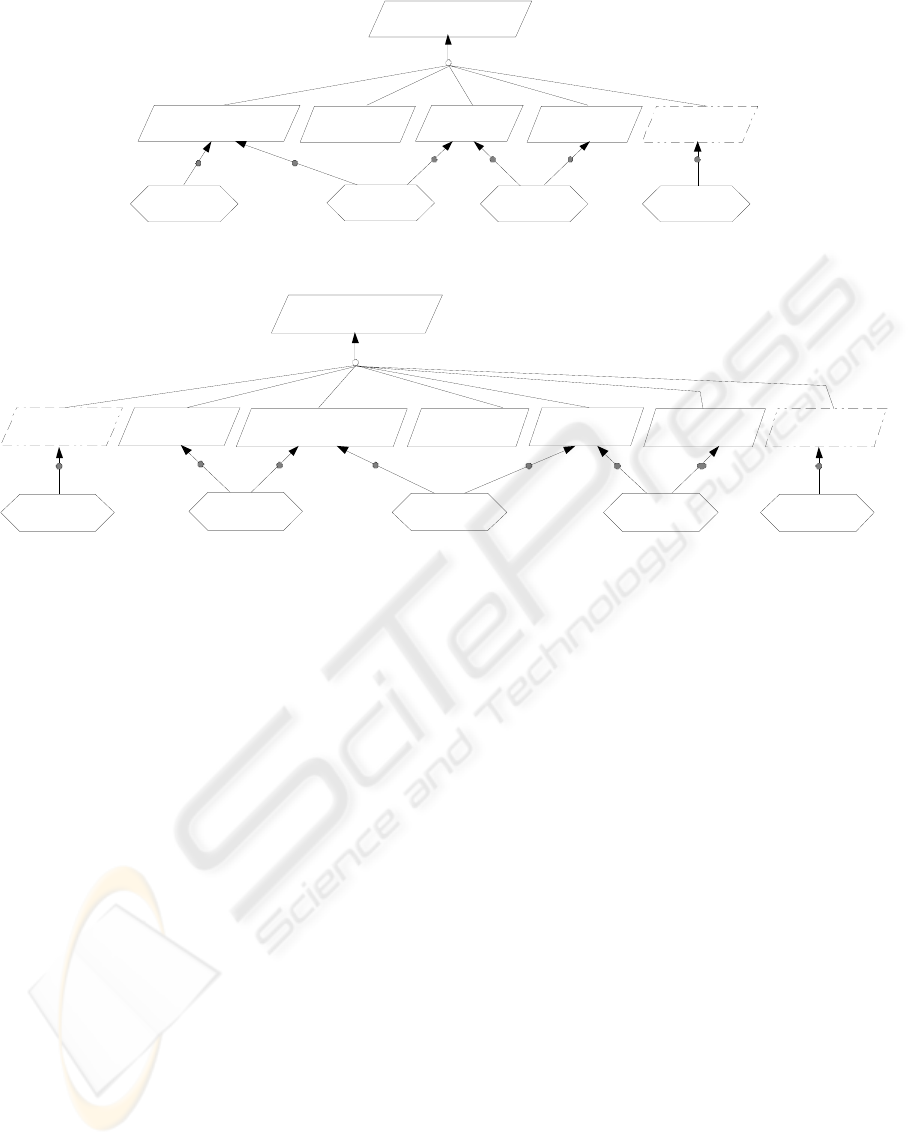
Cycab in movement
towards the calling station
Calling station
detected
Cycab stopped
Driving system
Human driver
Doors opened
[AUTODRIVE][MANDRIVE]
[AUTODOOR]
Doors opened
[MANDOOR]
Cycab put at disposal
at the calling station
PassengerDriving system
[AUTODRIVE]
[MANDRIVE]
Figure 3: Goal submodel of the goal Cycab put at disposal at the calling station.
Doors closed
Destination station
detected
Cycab stopped
Driving system
Human driver
Doors opened
[AUTODRIVE] [MANDRIVE]
[AUTODOOR]
Doors opened
[MANDOOR]
Vehicule brought
to destination
Doors closed
Cycab in movement
towards the calling station
Driving system
[AUTODRIVE][MANDRIVE]
Passenger
[AUTODOOR][MANDOOR]
Passenger
Figure 4: Goal submodel of the goal Vehicule brought to destination.
used, or rejected.
On figure 3 another case is presented: a
requirement transformed into an hypothesis
depending on the choice of a given variant.
Figure 4 does not introduce new matters but
shows that the proposed mechanism can be
generalized and how variants impact on the different
subgraphs of a goal model. In order to reduce the
complexity of the graph, we could have used a
graphical formalism to transform conditionally a
requirement in an hypothesis in the same box, but
this formalism would complicate unnecessarily the
graphical conventions.
2.3 Variants applied to other KAOS
Models
Applying our variant mechanism to links of other
KAOS models (namely operation and object
models) has not be considered for the moment.
Indeed, it is already possible to infer interesting
statements by applying some semantic transitivity
rules. When a variant is applied on a reduction link
between a goal and a requirement, it may be
deduced that the variant puts a condition not only on
the requirement but also on the objects and
operations linked to it respectively by Concerns
links and Operationalizes links. With the same
principle, when a variant is applied on a
responsibility link between a goal and an agent, it
may be deduced that the variant puts a condition not
only on the agent but also on the operations that the
agent may possibly execute. For example let us
examine the [ONDEMMOV] variant conditioning
the reduction link to the requirement
Transportation requested in figure 1. If an object
Calling button is related through an
operationalization link to this requirement, it may be
deduced that a calling button is needed if the chosen
moving mode is on demand.
3 FACETS AND VARIANT
GRAPHS
When we thought about variability in the simplified
cycab case study, we easily found three variability
examples that have a direct impact on the goal
model:
- the moving mode that may be automatic or on
demand,
- the driving mode, either automatic or manual
(with a human driver),
- the opening doors system, either automatic or
manual.
ICEIS 2008 - International Conference on Enterprise Information Systems
342
We began to organize them in a simple tree, in
which certain nodes were named facets (moving
mode, driving mode, opening doors system) and
others were variants. We defined a facet as a choice
to be made among several variants. Facets seem to
be possibly linked together with an AND semantics,
because each facet has to be fixed for a given
system, while variants seem to be possibly linked
together with an OR semantics, because one of the
variants has to be chosen. It’s important to notice
that exclusive-OR semantics is too strong to
represent such a piece of knowledge, on the same
manner as for KAOS OR-decomposition links. For
instance the moving mode may vary depending on
time considerations (rush periods), number of users
demands, presence of other cycabs, etc. Thus the
variants automatic moving mode and manual moving
mode may be both effective on a system. It is the
same for the driving mode, depending for instance
on parts of the lap or on different functioning modes
(in the evening, cycabs may return alone to their
night station in an automatic slow mode). The
opening doors system of one cycab cannot be both
automatic and manual, but we can consider that
heterogeneous cycab could be used on the same lap,
ones having automatic doors and others manual
doors.
Facets and variants can be organized in a goal
graph if they are transformed into goals by adding to
them the passive verb “fixed” with the semantics
“chosen”. This gives the following semantics to
these new goals:
- a “variant” goal is satisfied if and only it is
fixed for a given system to build, by fixing its
boolean value (true=”we keep it”, false=”we don’t
use it”),
- a “facet” goal is satisfied if and only if one of
its variants is fixed,
- all facets are attached to an higher-level goal
named “variants fixed” through an AND link,
because a given system is fixed if and only if all its
associated facets are fixed.
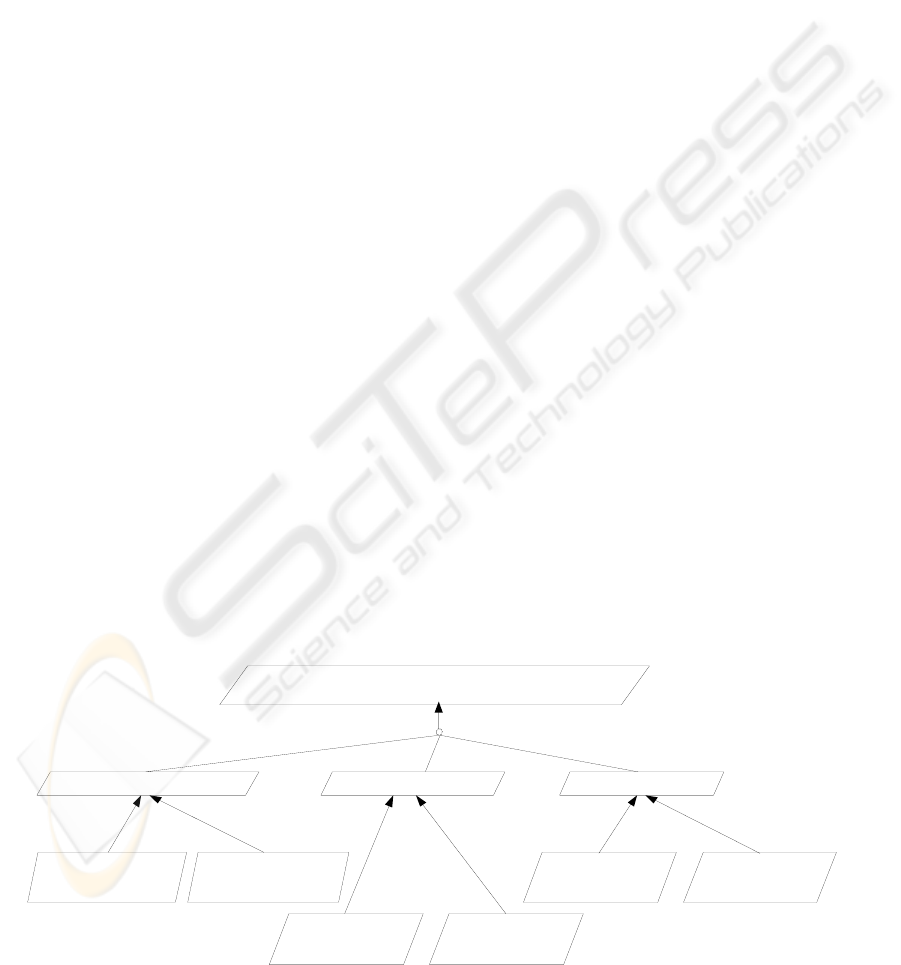
Thus, the goal model of figure 5 was produced. We
called it the variant model (or variant graph) of the
goal model of the case study.
The meaning of this tree is partially related to the
construction process of the requirements: each facet
when fixed by the engineering team will have a
precise impact on the corresponding goal model.
Two complementary uses of this kind of graph may
be considered:
- some parts of the graph and the consequences
on the goal and responsibility models are already
specified in a domain repository; impacts of
variants may be studied and used as some facets
for choosing or rejecting variants,
- other parts of the graph and the consequences
on the goal and responsibility models are
established by the engineering team, as an help in
visualizing and rationally choosing the adapted
variants that fit well with the main goal to satisfy.
Obviously there may be more than two variants in a
facet: for instance we may add to the Driving mode
fixed facet the variant Distant visiophonic driving
mode fixed (used only in restricted cases).
Now we present how to modify the partial
metamodel of KAOS (see e.g. Heaven 2004). Two
preliminary modifications are needed. Firstly, we
transform the responsibility and reduction links into
associative objects (represented in figure 6 as
classical objects) in order to allow them to be
destinations for variants.
Variants of the goal « Cycab transportation requests satisfied in
a safe, efficient, usable and cheap way » fixed
Cycab displacement mode fixed Opening doors system fixed Driving mode fixed
Automatic displacement
mode fixed
[AUTOMOV]
On demand displacement
mode fixed
[ONDEMMOV]
Automatic opening
doors system fixed
[AUTODOOR]
Manual opening
doors system fixed
[MANDOOR]
Automatic driving
mode fixed
[AUTODRIVE]
Manual driving
mode fixed
[MANDRIVE]
Figure 5: Variants model of the case study.
USING VARIANTS IN KAOS GOAL MODELLING
343
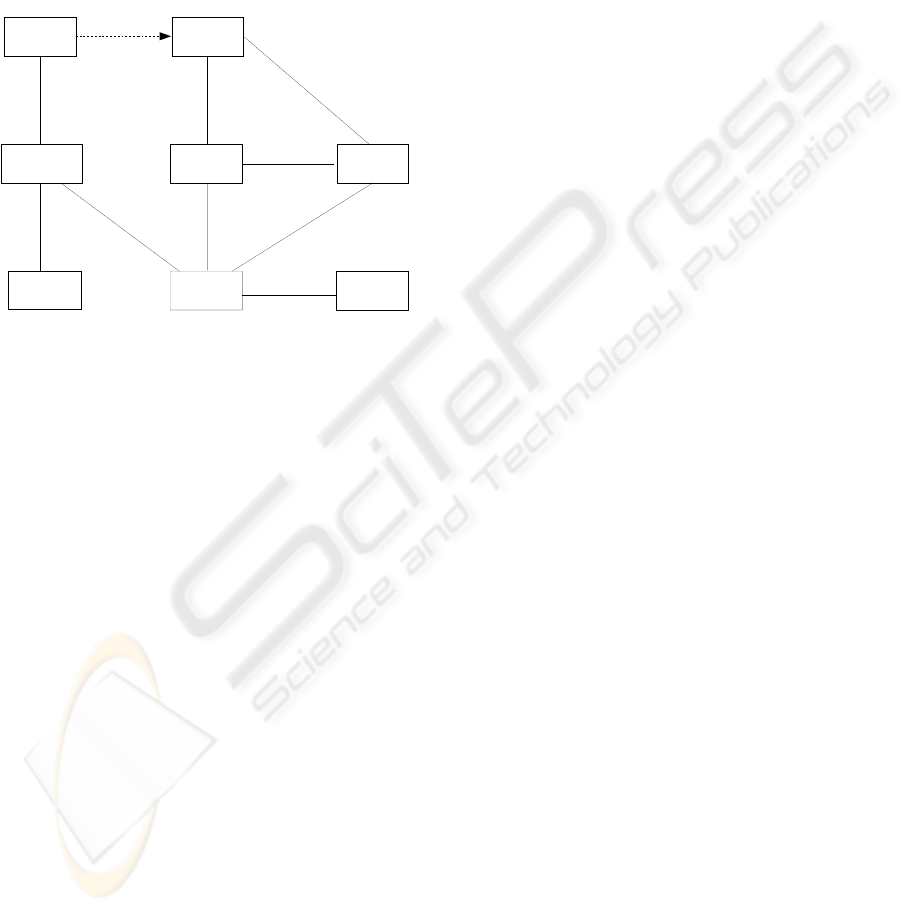
Secondly, we transform the newly created reduction
object into two distinct objects: Reduction link and
Conjunctive cluster, in order to allow the
representation of AND-reduction links as well as
OR-reduction links, and to allow both of them to be
set as destinations for variants.
Conjunctive clusters state the structure of AND-
reduction links: they are associated to all the
reduction links that refer to the subgoals of the AND
cluster.
System
goal
Conjunctive
cluster
Reduction
link
Variant
1,1
0,n
1,n 1,1
1,n
1,1
is_a
Responsability
Requirement
1,1
1,n
0,n
0,n
0,n1,n
Facet
1,12,n
0,n
0,n
Agent
1,1
0,n
Figure 6: Partial metamodel including variants.
4 FUTURE WORK
Further investigations have still to be done,
including: specification of constraints between
variants (incompatibilities, etc.), links to operation
and object models, and elaboration of guidelines in
order to help in the construction of such variants
graphs and variant-controlled goal models, and to
facilitate the elaboration process of decisions upon
the variants choices.
Hereafter are some benefits of variants applied to
goals. Firstly, it adds some kind of polymorphism to
goal models. Then, it can represent variations that
cannot be easily represented with KAOS
alternatives. Finally it helps in choosing between
options in the expression of a given problem to
solve, by allowing consequences on goal and
responsibility models to be visualized.
REFERENCES
Arango G., 1994. Domain Analysis Methods, in Software
Reusability, Eds by W. Schäfer, R.Prieto Diaz & M.
Matsumoto, Ellis Horwood.
Bachmann F., Bass L., 2001, Managing variability in
software architecture, ACM Press.
Bennasri S., Souveyet C., and Rolland C., 2004. Modeling
variability in requirements with maps, Advances in
Information Systems.
Cybercar projects, http://www.cybercars.org/.
Dardenne A., van Lamsweerde A. and Fickas S., 1993.
Goal-oriented Requirements Acquisition, Science of
Computer.
Halmans G., Pohl K., 2003. Communicating the variability
of a software product family to customers, Software
and System Modeling, Springer-Verlag.
Heaven W., Finkelstein A., 2004. An UML profile to
support requirements engineering with Kaos, IEE
Proceedings Software, vol. 151 10-27.
Jacobson I., Griss M., Johnsson P., 1997. Software Reuse:
Architecture, Process and Organization for Business
Success, Addison Wesley.
Kang K., Kim S., Lee J. et al., 1998. FORM: A Feature-
Oriented Reuse Method with Domain-Specific
Reference Architectures, Annals of Software
Engineering, 5 143-168.
Liaskos S., Lapouchnian A., Yu Y., Yu E. and
Mylopoulos J., 2006. On Goal-based Variability
Acquisition and Analysis, 14th IEEE Int. Conf. on
Requirements Engineering.
Liaskos S. & al., 2007. Exploring the Dimensions of
Variability: a Requirements Engineering Perspective,
Int. Workshop on Variability Modelling of Software-
intensive Systems.
Lutz R., 1993. Analysing Software Requirements Errors in
Safety-Critical, Embedded Systems, First IEEE
International Symposium on Requirements
Engineering 126-133.
Rolland C., Souveyet C., BenAchour C., 1998. Guiding
Goal Modelling Using Scenarios, IEEE Transactions
on Software Engineering, Special issue on scenario
Management 1055-1071.
Safety-Critical Systems: Challenges and Directions, 2002.
ACM Press, 24
th
International Conference on
Software Engineering 547-550.
Semmak F., Brunet J., 2005. Un métamodèle orienté buts
pour spécifier les besoins d'un domaine, 22e
INFORSID conference, 115-132, Hermès Ed.,
Grenoble, France.
Semmak F., Brunet J., 2006. Variability in Goal-oriented
Domain Requirements, 9th Int. Conference on
Software Reuse (ICSR), LNCS vol. 4039, Springer
Verlag.
The Standish Group, Chaos, 1995. Standish group internal
report.
van Gurp J., Bosch J., Svahnberg M., 2001. On the notion
of variability in Software Product Lines, Proceedings
of the Working IEEE/IFIP Conference on Software
Architecture.
van Lamsweerde A., 2003. From Systems Goals to
Software Architecture, Formal Methods for Software
Architectures, LNCS vol. 2804, Springer.
Yu E., 1997. Towards Modeling and Reasoning Support
for Early-Phase Requirements Engineering, 3
rd
IEEE
Int. Symposium on Requirements Engineering 226-
235.
ICEIS 2008 - International Conference on Enterprise Information Systems
344
