
RICAD: TOWARDS AN ARCHITECTURE FOR RECOGNIZING
AUTHOR'S TARGETS
Kanso Hassan
1,2
, Elhore Ali
1
, Soulé-Dupuy Chantal
1,2
and Tazi Said
1,3
1
Université de Toulouse 1, 2 rue Du Doyen Gabriel Marty 31042 Toulouse, cedex 9, France
2
IRIT,CNRS Université Paul Sabatier118, route de Narbonne, 31062 Toulouse, cedex4, France
3
LAAS, CNRS, 7 Avenue Colonel Roche 31077 Toulouse, cedex 4, France
Keywords: Information Research, Intentional Structure, Intentional Explanation, Ontology.
Abstract: We present RICAD system based on a semi-automatic method from specific-domain corpus (with which it
is impossible to apply classical method information research). This approach is based on a model of
intentional structure and RICAD system to recognize the author’s intentions from written documents in a
specific domain. Our RICAD system happens in three stage: 1) to make a segmentation in a semi-automatic
way of a document according to the authors intentions, and to extract the intentional verbs accompanied by
their concepts of each segment through the system algorithms, 2) ontology building and 3) This system is
also able to update the ontology of intentions for the enrichment of the knowledge base containing all
possible intentions of a domain.
1 INTRODUCTION
The masses of information the researcher is exposed
to make it hard
for her to find the needle in the
haystack as it is impossible to skim-read even a
portion of the potentially relevant material. The
information access and search problem is
particularly acute for researchers in interdisciplinary
subject areas like computational linguistics or
cognitive science, as they must in principle be aware
of articles in a whole range of neighboring fields,
such as computer science, theoretical linguistics,
psychology, philosophy and formal logic.
In this article, we tackle the problems of
representation of information contained in
documents by basing us on the various structures
which can be extracted from it. Several types of
structures can be identified and used to describe
information and to facilitate research and the
restitution. The structures most fluently approached
in documentary information, according to the type of
concerned document , cover with supplementary
aspects: physical structure (related to the restitution),
logical structure (generally hierarchical organization
of the various elements composing a document),
semantic structure (semantic decomposition of a
document), rhetoric structure (is a descriptive and
functional theory of the textual organization based
on the recognition of semantic relations between
units of text), spatio-temporal structure
(representation in space and time). Exploitation of
the logical and physical structure has an interest
already proven with an aim of facilitating
fragmentation, storage and restitution of documents.
However, the documents structures based on
rhetoric, semantics and in particular the
communication intention are neither yet sufficiently
studied, nor exploited in the documentary systems.
Our work is focused more precisely on the concept
of intentional structure. This concept represents
intentional knowledge of the textual corpus. This
intentional knowledge could be used as a basis for
any process of annotation or of retrieval documents
because they will make it possible to bring
supplementary information on the contents of these
documents. By basing on the theory of the
intentionality, we developed an RICAD whose
objective is to find the communication intentions of
the authors. This RICAD uses techniques existent
natural techniques of deduction, close to those used
by an expert domain. Its specificity in the fact that it
is able to find the author intentions, to refine its
strategies of analysis of a new corpus and to produce
ontology of the intentions automatically. The
research and the identification of the intentions are
based on a segmentation of texts, then the analysis
of each segment to extract the intentional verbs and
374
Hassan K., Ali E., Chantal S. and Said T. (2008).
RICAD: TOWARDS AN ARCHITECTURE FOR RECOGNIZING AUTHOR’S TARGETS.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - ISAS, pages 374-379
Copyright
c
SciTePress

their associated concepts. The used techniques of
segmentations and the methods of extraction and
analysis of the intentional verbs are described in this
paper.
This article is organized by follow: section 2
gives an overview about research in plan
recognition. After the overview, we present the
recognition systems based on the intention (section
3). Finally, conclusion and future work are presented
in Section 4.
2 RELATED WORK (OVERVIEW)
Since Schmidt(Schmidt et al.,78) first identified plan
recognition as a problem in its own right, plan
recognition has been applied widely to a variety of
domains, including natural language understanding
and generation (Allen et al., 80) (Carberry, 90), story
understanding (Wilensky, 78) (Charniak et al., 89,
93), multi-agent coordination (Huber et al, 94),
dynamic traffic monitoring (Pynadath et al., 95),
collaborative systems (Ferguson et al., 96, 98),
adventure game (Albrecht et al., 98), network
intrusion detection (Geib et al., 01), multi-agent
team monitoring (Kaminka et al., 02), and so on.
Many plan recognition approaches have been
proposed. (Kautz et al., 86) presented the first formal
theory of plan recognition, using McCarthy’s
circumscription. They define plan recognition
problem as identifying a minimal set of top-level
actions sufficient to explain the observed actions,
and use minimal covering set as a principle for
disambiguation. To deal with uncertainty inherently
in plan inference, (Charniak et al., 89, 93) built the
first probabilistic model of plan recognition based on
Bayesian reasoning. Their system supports
automatically generation of a belief network (BN)
from observed actions according to some network
construction rules. The constructed belief network is
then used for understanding a character’s actions in
a story. (Huber et al., 94) used PRS as a general
language for plan specification. They gave the
dynamic mapping from PRS specification to belief
networks, and applied the approach to coordinate
multi-agent team.
Pynadath and Wellman proposed a probabilistic
method that was based on parsing. Their approach
employs probabilistic state-dependent grammars
(PSDGs) to represent an agent’s plan generation
process. The PSDG representation, together with
inference algorithms supports efficient answering of
restricted plan recognition queries. More recently,
Bui et al., 02, 03) proposed an online probabilistic
policy recognition method based on the abstract
hidden Markov model (AHMM) and the extension
of AHMM allowing for policies with memories
(AHMEM). In their frameworks, scalability in
policy recognition in the models is achieved by
using an approximate inference scheme (i.e., Rao-
Black wellised Particle Filter). Besides Bayesian
models, some probabilistic approaches are based on
Dempster-Shafer theory, e.g., (Carberry, 90) and
(Bauer, 95, 96).
Though the approaches differ, most plan
recognition systems infer a hypothesized plan based
on observed actions. World states and in particular,
state desirability (typically represented as utilities of
states) are rarely considered in the recognition. On
the other hand, in many real-world applications,
utilities of different outcomes are already known
(Blythe, 99). A planning agent usually takes into
account that actions may have different outcomes,
and some outcomes are more desirable than the
others. Therefore, when an agent makes decisions
and acts on the world, the agent needs to balance
between different possible outcomes in order to
maximize the expected utility of overall goal
attainment. Utility and rationality issues have been
explored in earlier
Work in AI (e.g., rational assumptions, (Doyle,
92)). Plan recognition can be viewed as inferring the
decision making strategy of the observed agent. So it
is natural to assume that a rational agent will adopt a
plan that maximizes the expected utility. While
current probabilistic approaches capture the fact of
how well the observed actions support a
hypothesized plan, the missing part is the utility
computation.
One measure of progress in information retrieval
many systems has been developed, i.e. which adapts
to the circumstances of the information recognition
process.
In this paper, we present the architecture of our
RICAD system to recognize intentional structure
from scientific specific-domain.
In the following section, we present the several
systems by taking into account the concept of
intention recognition.
3 INTENTIONAL RETRIEVAL
SYSTEMS
An intentional retrieval systems were developed by
our research team, these system are: SABRE system
(Al-Tawki et al., 02) is an Authoring system Based
on the Re-use, who allows helping the authors to
RICAD: TOWARDS AN ARCHITECTURE FOR RECOGNIZING AUTHOR'S TARGETS
375

create new documents based on fragments of
existing documents. These fragments are described
in terms of the intentions of their authors, and are
identified by the main intention of their author, The
XSEdit system «XML Shared Editor ", is a system
consists to conceiving and implements a tool of
distributed co-operative edition allowing managing
and controlling the intentions of the writers by
metadata (Tazi et al., 06a, 06b). It utilizes techniques
whose employment extends quickly currently and is
based on a portable language. This tool should make
it possible to the users to compile and annotate the
same document without having to be located at the
same room, and at the same moment. This tool has
more interest if the users not are at the same place.,
and finally the Pero system (Elhore et al., 06), and
RICAD System (Kanso et al. 07), the first system is
used the learning by observation through the
reasoning of intentions and the second one, the
RICAD System is to recognize the author’s
intentions from written documents in a specific
domain.
These Tow following section, shows how the
Pero system recognizes the intention of an action
executed and the RICAD system recognizes the
authors intentions from written scientific documents.
3.1 Pero System
The Pero system was developed with an aim of
implementing a model of problem solving based on
the concept of intention (Elhore et al., 05a, 05b, 05c,
05d, 06). This model consist of a planner who allows
to solve mathematical problems applied to the
physical sciences by generating an explanation
related to each stage and which leads to the
resolution. The model proposes to integrate the
notion of intention in the process of problem solving
in order to add knowledge of explanation resolution.
This concept represents knowledge which leads to
the realization of each resolution action i.e. the
means and the reason used to take the action as well
as the explanatory argument. The graph of resolution
in which the nodes correspond to the states of the
planner and the arcs with the actions of resolution
makes it possible to represent the explanations
(Figure 1) as being the goal, the means and the
justification of resolution on the level of each arc of
the graph.
This section shows how the Pero system
recognizes the intention of an action executed. This
recognition eases the explanation process of the
solving exercises.
We will adopt the following generic form to
represent an intention in the process of the scientific
problem solving: IA (a1, a2, A, G, M, R)
Where IA represents the intention belonging to I
could be carried out by action A. This expression
expresses that the agent a1 with intention I to carry
out action A, to try to achieve the goal G, by the
means M for reason R. a2 represents the agent which
is intended the action, it is generally learning it.
Where
a1: is the author of the action; it is generally the
system,
a2: is the agent for which is intended the
explanation of the action; generally is the learning,
G: (Goal) is an act which expresses what the
author wants to make by making the action;
M: (Means) is an act which expresses the type of
action achieved on the reasoning;
R: (Reason) is an act which expresses with
which concepts the author makes the action.
This model we propose here takes into account
the context of actions being performed. Each action
achieved by the planner is contextualized, i.e. we
consider what one may call the intention of the
action. The intention of an operator of the planner is
a set of knowledge representing the goal of the
action, the means used to perform the action and the
reasons that justify the action. This knowledge
depends on the context of the action, so for any
action performed to solve a problem, there is an
intention that could be considered as the explanation
of this contextual action. The whole explanation of
the solution is considered as the set of explanations
of the actions performed to attain the final solution.
In previous work (Tazi, 2001) we have developed
the model of Intentional structures that we recall
briefly here.
Pero generates the knowledge concerning the
description of what we call the intention of the
action, (i.e. the goal, the means and the reasons for
the action). This knowledge comes from the solution
graph. The whole explanation destined for the
student is the concatenation of the all intentions of
the actions belonging to the path solution.
In order to illustrate this model, the following is
a draft of how the solution is proved and the
explanation is generated.
Let EQ1 be the initial state, and EQ2 be the final
state. (EQ1 and EQ2 are respectively the first
equations that will lead to the second equation after
a certain number of substitutions and or calculus).
When the system passes from one state S1 to the
following one (S2) it concatenates the intention of
the action that leads from S1 to S2.
ICEIS 2008 - International Conference on Enterprise Information Systems
376
1. Goal: try all possible combination of
substitution and calculus to find the solution
2. Means: are the operators used in the actions;
3. Reason: is the set of theorems, laws or functions
that triggers the operator.
For each action the intention is defined as:
1. Goal: Try to find the final state from the current
state
2. Means: The operators used to perform the
action (e.g. Substitute, Calculate, Derive, etc.)
3. Reason: justify the action by the arguments that
trigger the action, these arguments can be
theorems, laws, lemma functions, etc.
Explanation Etat Final
état initial
Assumption
Conclusion
Action of global problem
Intention of global problem
(G, M, R)
S1 S2 Sn-1 SnAction 1
Intention 1 (Goal1,
Means1, Reasons1)
Action n-1
Intention n-1
(Goal n-1, Meansn-1, Reasonsn-1)
Figure 1: Explanation process with intention recognition.
In the following section we present our RICAD
system and different stages of intention research.
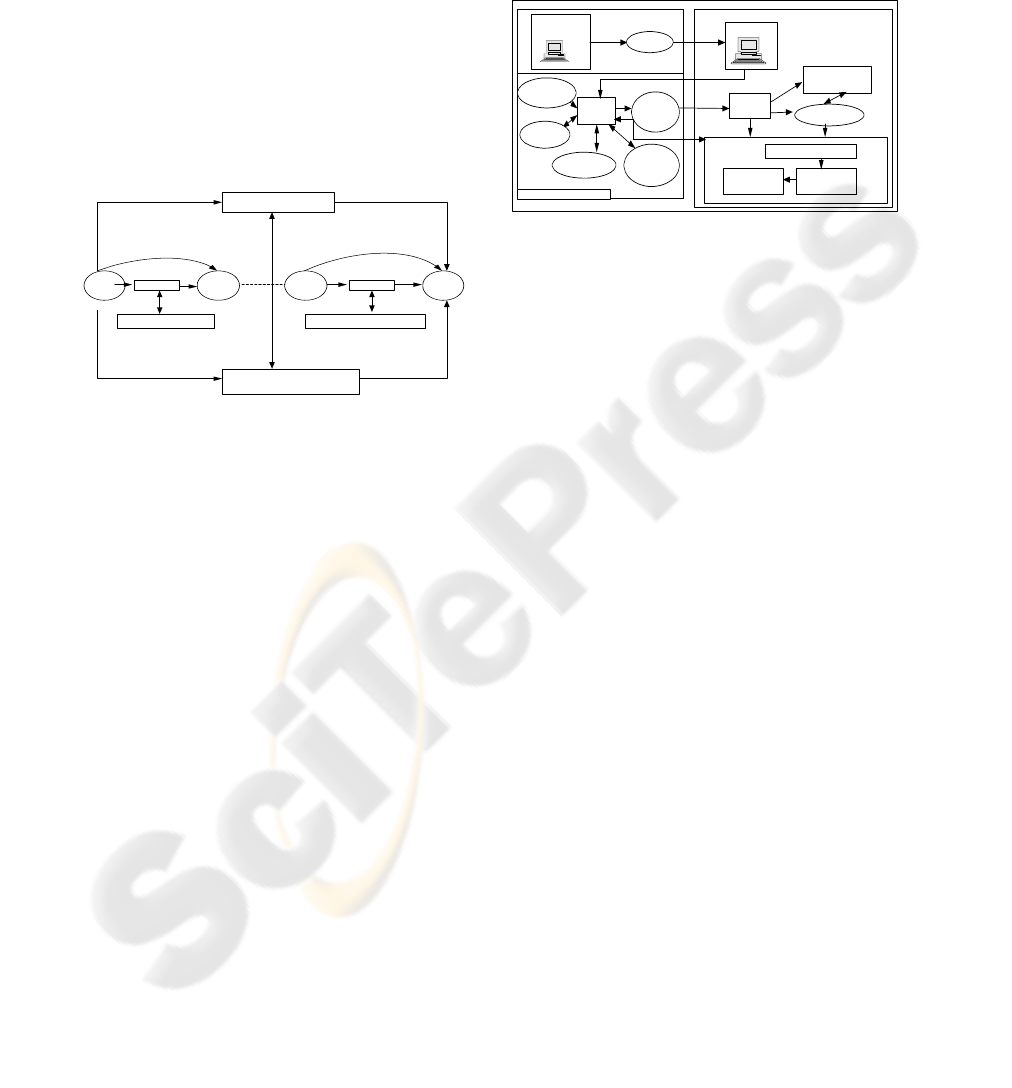
3.2 RICAD System
The RICAD is dedicated in the information research
of textual corpus (Figure 2). It is based on
algorithms which facilitates the intentions research
and its principle of operation closer to domain
expert. At the beginning, after we make manual text
segmentation, it calls some tools such as:
Treetagger, for extracting the verbs for each
segment, Wordnet to find the synonyms of the
verbs which belong to the same segment in order to
minimize the set of verbs, a knowledge base
containing the intentions in order to find out the
intentional verbs of this segment.
The RICAD system allows also adopting a
method of counting the intentional verbs to find the
occurrences of each verb in order to announce the
intention of each segment. It has also the possibility
of generating intentions ontology of documents
containing all possible intentions.
The RICAD system is based on the following
steps. The initialization, this task which set up the
necessary resources to all other following
operations. It is the first task being launched and is
carried out only before starting the other tasks.
Initialization in the RICAD system, allow us to
introduce a corpus annotated by an expert, and to
enrich the knowledge base containing the verbs, and
their relative and absolute frequencies and their
intentions.
Result in XMLfiles
structuring
of ontology
Knowledge base
storage new
intention
Ontology update
Possible intentions of
the textual corpus
Layer Knowledge
My Computer
graphical
Interface Expert
RI CAD
extraction of
int enti onnal
verbs
syntactic
Ana lys i s
Treetagger
New Text
Textual corpus
manually
segmented
semantic Analysis
Wo r d Ne t
compraison(knowl
dge base verbs,
new verbs corpus
Initialization
Environment of initialization and treatment
Figure 2: RICAD Architecture.
The Introduction of a new corpus, this stage
makes it possible to the reader to introduce a new
corpus not segmented, and used it like the entry of
the system, in order to make an analysis to segment
it according to the authors intentions. Syntactic
Analysis (Treetagger) allows the system to make a
syntactic analysis on each logic element of the
document. The RICAD recognizes the sentences and
the verbs using the ontology of the verbs. The
Semantic Analysis (Wordnet) after the generation of
the textual files which contain lists of the verbs, the
semantic analysis uses Wordnet to find the
synonyms of the verbs in the annotated corpus in the
same segment in order to avoid the redundancy of
the verbs, and at the same time to find the other
synonyms of these verbs.
The Comparison
(Knowledge Base verb, new corpus verb) will be
made according to most relevant frequencies of
these verbs in the knowledge base and that of the
verbs of a new document (which is an estimation of
the verbs probability that repeat in the knowledge
base with big frequencies). In this stage we obtained
segmentation by sentences, and we used then the
principle of regrouping sentences by intentions. For
that, all the contiguous sentences which have verbs
at the same intentions are regrouped at the same
segment. The Result on XML files, this stage allows
the generation of an XML file containing the results
of segmentation accompanied by intentions.
When the RICAD system find a new terms
(verbs or concepts) from collections of scientific
documents not included in our knowledge base, it
will be added and updated automatically the existing
knowledge base. These changes may then be
incorporated into the RICAD knowledge base.
RICAD: TOWARDS AN ARCHITECTURE FOR RECOGNIZING AUTHOR'S TARGETS
377

4 CONCLUSIONS
This article presented some related work and several
systems were developed by our research team based
on the concept of intention. We used existing
structures in order to restructure the collections to
solve arising problems of information research
within these collections. We based on the concept of
intentional structure to establish a semi-automatic
system of segmentation according to the author’s
intentions.
We present some of our research into the
development of tools for analyzing scientific and
problem solving in the natural language processing
and extracting intentional information, and the
different relationships between local and global
intentions.
Ontologies are used with a knowledge
representation language for the machine and are
exploited with possibilities of inference.
REFERENCES
Albrecht D. W., Zukerman I. and Nicholson A. E.
Bayesian Models for Keyhole Plan Recognition in an
Adventure Game. User Modeling and Use Adapted
Interaction, 8(1-2):5-47, 1998.
Al-Hawamdeh, S."Knowledge management: re-thinking
information management and facing the challenge of
managing tacit knowledge" Information Research,
8(1), paper no. 143 [Available at
http://InformationR.net/ir/8-1/paper143.html], 2002.
Allen J. F. and Perrault R. Analyzing Intention in
Utterances. Artificial Intelligence, 15(3):143-178,
1980.
Al-Tawki, Y. Création par réutilisation de documents
décrits par les intentions de l’auteur. Doctorat de
l'Université de Toulouse 1. 2002.
Bauer M. A Dempster-Shafer Approach to Modeling
Agent Preferences for Plan Recognition. User
Modeling and User-Adapted Interaction, 5(3-4):317-
348, 1995.
Bauer M. Acquisition of User Preferences for Plan
Recognition. Proceedings of the Fifth International
Conference on User Modeling, 1996.
Blythe J. Decision-Theoretic Planning. AI Magazine,
20(2):37-54, 1999.
Bui H. H. A General Model for Online Probabilistic Plan
Recognition. Proceedings of the Eighteenth
International Joint Conference on Artificial
Intelligence, 2003.
Bui H. H., Venkatesh S. and G. West. Policy Recognition
in the Abstract Hidden Markov Model. Journal of
Artificial Intelligence Research, 17:451-499, 2002.
Carberry S. Plan Recognition on Natural Language
Dialogue. The MIT Press, 1990.
Charniak E. and Goldman R. A Bayesian Model of Plan
Recognition. Artificial Intelligence, 64(1):53-79, 1993.
Charniak E. and Goldman R. A Semantics for
Probabilistic Quantifier-Free First-Order Languages,
with Particular Application to Story Understanding.
Proceedings of the Eleventh International Joint
Conference on Artificial Intelligence.1989.
Doyle J. Rationality and Its Roles in Reasoning.
Computational Intelligence, 8(2):376-409, 1992.
Elhore, A., Tazi, S.“Pero a planning system for the
explanation of problem solving in physics”. Mixed
Language Explanation in Learning Environment
(MLELE’05) in conjunction with AIED’05,
Amsterdam, p. 80-81, 2005.
Elhore, A., Tazi, S., 2005 “Explaning and Indexing
Solutions for Physics Learning”. IEEE, Conférence
International CELDA’05, p. 532-538.
Elhore, A., Tazi, S.“Planning solution for physics
learning”. International conference CAPS’05
http://europia.org/ICHSL05/) CAPS 05, Marrakech –
Morocco, 2005.
Elhore, A., Tazi, S.“Planning and explaining solutions for
physics learning”. IEEE international conference on
Machine Intelligence
(http://www.acidcaicmi2005.org/) The 2nd ACIDCA-
ICMI'2005. Tozeur – Tunisia, 2005.
Elhore, A., Tazi, S.“Apprentissage par observation à
travers les intentions du raisonnement”. Conference on
Information Technologies, MCSEAI’06, 2006.
Ferguson G. and Allen J. F. TRIPS: An Intelligent
Integrated Problem-solving Assistant. Proceedings of
the Fifteenth National Conference on Artificial
Intelligence, 1998.
Ferguson G., Allen J. F. and Milller B. TRAINS-95:
Towards a Mixed-Initiative Planning Assistant.
Proceedings of the Third Conference on Artificial
Intelligence Planning Systems, 1996.
Geib C. W. and Goldman R. P. Plan Recognition in
Intrusion Detection Systems. Proceedings of the
Second DARPA Information Survivability Conference
and Exposition, 2001.
Goldman R. P., Geib C. W. and Miller C. A.. A New
Model of Plan Recognition. Proceedings of the
Fifteenth Conference on Uncertainty in Artificial
Intelligence, 1999.
Haddawy P. and Suwandi M. Decision-Theoretic
Refinement Planning Using Inheritance Abstraction.
Proceedings of the Second International Conference
on Artificial Intelligence Planning, 1994.
Huber M. J., Durfee E. H. and Wellman M. P. The
Automated Mapping of Plans for Plan Recognition.
Proceedings of the Tenth International Conference on
Uncertainty in Artificial Intelligence, 1994.
Kaminka G., Pynadath D. V. and Tambe M. Monitoring
Teams by Overhearing: A Multiagent Plan
Recognition Approach. Journal of Artificial
Intelligence Research, 17:83-135, 2002.
ICEIS 2008 - International Conference on Enterprise Information Systems
378

Kautz H. A. and Allen J. F. Generalized Plan Recognition.
Proceedings of the Fifth National Conference on
Artificial Intelligence, 1986.
Mao W. and Gratch J. Decision-Theoretic Approaches to
Plan Recognition. ICT Technical Report
(http://www.ict. usc.edu/publications/ICT-TR-01-
2004.pdf), 2004.
Marsella S. and Gratch J. Modeling Coping Behavior in
Virtual Humans: Don’t Worry, Be Happy.
Proceedings of the Second International Joint
Conference on Autonomous Agents and Multiagent
Systems, 2003.
Pynadath D. V. and Wellman M. P. Accounting for
Context in Plan Recognition, with Application to
Traffic Monitoring. Proceedings of the Eleventh
International Conference on Uncertainty in Artificial
Intelligence, 1995.
Rickel J., Marsella S., Gratch J., Hill R., Traum D. and
Swartout W. Toward a New Generation of Virtual
Humans for Interactive Experiences. IEEE Intelligent
Systems, 17(4):32-38, 2002.
Schmidt C. F., Sridharan N. S. and Goodson J. L. The Plan
Recognition Problem: An Intersection of Psychology
and Artificial Intelligence. Artificial Intelligence,
11(1- 2):45-83, 1978.
Tazi S."Description de documents multimédias, standards
et tendances". dans Imad Saleh (Editeur), Conception
et Réalisation, Hermès, 2004.
Tazi S., DRIRA K., ESSAJIDI K. Enabling consistency of
communicative intentions in cooperative authoring.
2nd International Conference on Innovative Views of
NET Technologies (IVNET'2006), Florianopolis
(Brésil), pp.237-246, 2006.
Tazi S., DRIRA K., ESSAJIDI K., Maintien de la
cohérence des intentions de communication dans la
rédaction coopérative. 9ème Colloque International sur
le Document Electronique (CIDE'2006), Fribourg
(Suisse), pp.151-168., 2006.
Wilensky R. Understanding Stories Involving Recurring
Goals. Cognitive Science, 2:235-266, 1978.
RICAD: TOWARDS AN ARCHITECTURE FOR RECOGNIZING AUTHOR'S TARGETS
379
