
IMPLEMENTING ORGANIC COMPUTING SYSTEMS WITH
AGENTSERVICE
∗
Florian Nafz, Frank Ortmeier, Hella Seebach, Jan-Philipp Stegh¨ofer and Wolfgang Reif
Lehrstuhl f¨ur Softwaretechnik und Programmiersprachen, Universit¨at Augsburg, D-86135 Augsburg, Germany
Keywords:
Organic computing, software engineering, design methods, multi-agent systems.
Abstract:
Designing and implementing Organic Computing systems is typically a difficult task. To facilitate the con-
struction a design pattern for Organic Computing systems has been developed. This organic design pattern
(ODP) helps in modeling and designing a broad class of Organic Computing systems.
This paper focuses on the implementation of Organic Computing systems with the help of this pattern. The
core idea is to provide a generic implementation by mapping ODP artifacts to artifacts of a multi-agent frame-
work. The used framework – AgentService – is one of the few C# multi-agent frameworks. In this paper a
possible implementation as well as benefits and limitations are described.
1 INTRODUCTION
A new trend in computer science is to make systems
organic (M¨uller-Schloer et al., 2004; Branke et al.,
2006). Organic here means, that the systems are capa-
ble of autonomouslyreacting to changes in their envi-
ronment. Such capabilities are called self-organizing,
self-healing, self-configuring, self-adapting or simply
self-x (G¨udemann et al., 2006a). The basis for self-x
capability is often to give the systems some degrees
of freedom, which allow them to react to component
failures and/or changing environments. In (Seebach
et al., 2007) an organic design pattern for modeling
Organic Computing systems has been introduced. It
helps a lot for modeling and design, but unfortunately
artifacts of the pattern can not be directly mapped into
code. This is because ODP artifacts are defined on
a very abstract level. Interaction on ODP level typi-
cally comprises – on the code level – sending a mes-
sage, relaying it, receiving it, interpreting it and acting
according to it. To facilitate construction of Organic
Computing systems it is useful to provide generic ref-
erence implementations of ODP models in a standard
programming language. In this paper C# has been
chosen as programming language and the multi-agent
framework AgentService (Boccalatte et al., 2006) is
∗
This research is partly sponsored by the priority pro-
gram “Organic Computing” (SPP OC 1183) of the German
research foundation (DFG)
used as communication infrastructure. Possibilities,
risks and experiences of this generic implementation
will be discussed in the following sections. They are
illustrated on a real-world case study from the domain
of production automation.
In Sect. 2 a brief introduction to the organic de-
sign pattern is given and Sect. 3 provides a similar
introduction to the multi-agent framework AgentSer-
vice. A generic mapping of ODP artifacts into
AgentService artifacts is shown in Sect. 4. The prac-
ticability and lessons learned are illustrated on a case
study from production automation (Sect. 5). Sect. 6
concludes the paper.
2 DESIGNING OC SYSTEMS
Design and construction of Organic Computing sys-
tems is often challenging. To facilitate the model-
ing of these systems, an organic design pattern (ODP)
has been developed. This pattern is suitable for char-
acterization and design of Organic Computing appli-
cations. It gives explicit descriptions (constructs and
rules) of how domain-specific models generally look
like and how they should be built. Specific applica-
tions are then instances of the ODP. The pattern in-
structs both the structure of the whole system and the
communication channels of system components.
Fig. 1 shows the ODP. The main components of
64
Nafz F., Ortmeier F., Seebach H., Steghöfer J. and Reif W. (2008).
IMPLEMENTING ORGANIC COMPUTING SYSTEMS WITH AGENTSERVICE.
In Proceedings of the Third International Conference on Evaluation of Novel Approaches to Software Engineering, pages 64-71
DOI: 10.5220/0001762700640071
Copyright
c
SciTePress

Figure 1: Organic design pattern (ODP).
Organic Computing systems are Agents. They pro-
cess Resources according to given Tasks. Every Agent
knows a set of Agents from which it can receive Re-
sources (Input), a set of Agents to whom it can give
Resources (Output) and a set of Capabilities which it
can provide. Which Capabilities an Agent performs
and from resp. to which Agent Resources are taken
resp. given is captured in its Role.
To ensure consistency Roles may be restricted by
OCL-constraints (Object Management Group, 2003)
which assert for example (constraint 1) that the role
assigned to an agent only includes capabilities the par-
ticular agent can perform.
Agents, Capabilities, Resources and Tasks are all
part of the functional aspects of the system and the
self-x infrastructure. They describe what has to be
done and what can be done. But the whole system
can only process Resources according to their Tasks
if Roles are distributed correctly among Agents. Al-
location of Roles to Agents is the core of the organic
part of the system. For finding a correct allocation
it is necessary to take Capabilities, Tasks and agent
topology (i.e. the connection between agents through
their inputs and outputs) into account. All organic in-
telligence may be specified in one entity: the virtual
centralized Observer/Control. This entity can then ei-
ther contain a (distributed) algorithm, which calcu-
lates role allocations or just a specification of such an
algorithm.
This pattern allows firstly for splitting construc-
tion of functional and organic parts of the system in
two. Secondly, it allows for a generic specification of
role allocation algorithms as logical problems. The
basic idea here is to describe valid (i.e. working) role
allocations with a logical formula, which has the de-
grees of freedom as free variables. Finding a valid
role allocation is then equivalent to finding a satis-
fying valuation of free variables of a formula. See
(Seebach et al., 2007) for more details. An example
system which is modeled as an instance of the ODP is
described in Sect. 5.
In the context of this paper it is now more impor-
tant to note, that ODP provides a generic modeling
formalism for Organic Computing systems. It con-
sists of a certain set of high-level artifacts, some inter-
action between them and some consistency rules. The
goal – in this paper – is to provide a generic transfor-
mation of an ODP model into executable code.
IMPLEMENTING ORGANIC COMPUTING SYSTEMS WITH AGENTSERVICE
65

Figure 2: Basic AgentService concepts.
3 AN INTRODUCTION TO
AGENTSERVICE
In this section, a short summary of the basic con-
cepts of AgentService is given. For a more detailed
overview see (Boccalatte et al., 2004). The AgentSer-
vice framework has been developed at the Univer-
sity of Genua and is one of the few C# agent plat-
forms. It incorporates all the basic concepts of a
FIPA-compatible
2
application, i.e. an Agent Man-
agement System as well as FIPA-compliant messag-
ing services and directory services. Furthermore, a
comprehensive code basis for agent development is
available in the form of the AgentService API. Ad-
ditional capabilities include persistence of agent state
and a plug-in system, which allows for the develop-
ment of enhancements to the platform itself. A sim-
plified overview of the most important parts of an
AgentService system is shown in Fig. 2.
The central components of AgentService are
Agents. An Agent comprises several instances of two
different classes: Behaviors and Knowledges. Behav-
iors encapsulate all actions an agent is able to per-
form, including communication with other agents and
manipulation of the environment and its knowledge
base. Knowledges contain everything the agent knows
about itself and its environment. In general, several
behaviors per agent may be active concurrently. If –
for example – an agent provides translation between
file formats, then this will be encapuslated in a behav-
ior. Several instances of this behavior may be created,
such that the agent can accept multiple translation re-
quests at the same time. These behaviors will then
2
The Foundation for Intelligent Physical Agents (FIPA)
defined the industry standard for interoperable agents. With
the completion of the standard in 2001 a common basis for
communicating, mobile agent systems has been set to which
almost all modern agent platforms comply. The standard
includes definitions for protocols, message formats as well
as architectural foundations for agents systems. Details can
be found on the FIPA website (FIPA Website, 1996).
run concurrently and terminate as soon as they fin-
ished their individual translation job. Note that all
behaviors access a common knowledge base (in this
example maybe a dictionary), which consists of all
knowledges known to the agent.
Before agents can exchange messages, a conver-
sation between the two peers has to be established. A
conversation provides a context for the message ex-
change and enables agents to subsume different mes-
sages to one instance of the protocol sequence. In-
coming conversations are accepted by the agent and
then forwarded to one of its behaviors which in turn
handles the protocol. Messages can be transferred
within these conversations by means of a proprietary
message format based on C#’s serialization facilities
or as standardized FIPA-ACL (FIPA ACL, 2002) mes-
sage codes.
Every time a behavior wants to access a knowl-
edge it has to lock the object first. This enables dif-
ferent behaviors of an agent to concurrently manip-
ulate the shared understanding of their environment.
Knowledges may contain arbitrary classes and are ac-
cessed with methods provided by the agent frame-
work. Knowledge objects can automatically be per-
sisted by the framework to provide recovery in case
of a system crash. Configuration of the platform and
the agents is contained in XML-files. These files de-
scribe the basic parameters of the framework as well
as the correct instantiation of knowledges and behav-
iors.
4 IMPLEMENTING OC SYSTEMS
WITH AGENTSERVICE
This section details a generic transformation of ODP
models into code using the AgentService framework.
Therefor, abstract ODP artifacts must be mapped in a
generic way to artifacts of AgentService framework.
An example of a concrete mapping (as an instance of
the generic mapping) will be presented in Sect. 5.3.
Table 1 gives an overview of the mapping:
There is a direct relationship between ODP’s no-
tion of an Agent and the agent artifact in AgentSer-
vice. Both entities are used for message dispatching
and as containers for the core functionality. An im-
portant difference to ODP is that AgentService does
not explicitly state which other agents are inputs or
outputs for resources. These associations are implic-
itly contained in the configuration of the instance.
ODP allows constraints on possible work-flows by
limiting the associated agents. In the implementation,
each agent is allowed to exchange resources with each
other hypothetically.
ENASE 2008 - International Conference on Evaluation of Novel Approaches to Software Engineering
66

Table 1: Relation between ODP and AgentService artifacts.
ODP Artifact AgentService Artifact
Agent Agent
VirtualCentralizedO/C Agent
Capability One generic behavior, which contains all
possible capabilities
Role Knowledge, which parameterizes the generic behavior
Role Allocation Set of knowledge
Task Need not be mapped explicitly, for self-healing and
self-configuring.
Resource Knowledge
The Capabilities of the agent are contained in one
generic behavior: the DO behavior. It contains all
the logic for processing resources. It is generic in the
sense, that it contains all theoretically possible capa-
bilities this type of agent may have. The DO behavior
is typically restricted with a “has” knowledge. The
“has” knowledge corresponds to the Has association
of the ODP. Typically, an agent initially has all capa-
bilities its class provides. During runtime, certain ca-
pabilities might vanish, because an agent is no longer
able to perform these certain tasks. In such a case,
the HAS knowledge is manipulated to reflect the loss
of the capability and the application usually has to be
reconfigured to become functional again.
Note, that in addition to ODP in AgentService
some more communication infrastructure is needed
for passing Resources between Agents. While on
ODP-level this can simply be done by changing as-
sociations, on code-level it is necessary to implement
some handshake protocols. Therefore, agents incor-
porate two additional basic behaviors (besides the DO
behavior): GIVE and TAKE. GIVE and TAKE are
used to exchange resources between agents consis-
tently. They implement an exchange protocol which
basically consists of a handshake, the transmission or
reception of the resource itself and a concluding ac-
knowledgment. The GIVE and TAKE behavior can
be restricted with knowledges (i.e. to whom resp.
from whom resources may be given/taken). This
models the Input and Output associations of the ODP.
A Role is also implemented as a knowledge. This
knowledge describes which Capability of the generic
DO behavior the agent is currently configured to per-
form. It also states from which agents resources
should be accepted and to which they are to be given.
This is done by setting specific knowledges, which
configure (together with the knowledges represent-
ing the Input and Output associations) the GIVE and
TAKE behaviors. Role allocations are in consequence
a set of (role) knowledges. Summarizing a role in
AgentService means: (1) accepting certain resources
(with the TAKE behavior), (2) processing them (with
the DO behavior) and (3) relaying them (with the
GIVE behavior)
3
.
Tasks are not explicitly translated. This is be-
cause the current implementation aims only at self-
healing and self-configuring systems. Therefore tasks
do not change dynamically. In the current imple-
mentation they are explicitly part of the virtual Ob-
server/Controller agent. In future additions it seems
to be possible to map them to specific knowledges.
The Resources which are processed by the agents
are mapped to knowledges as well. Resources are ex-
changed between agents according to the roles. Tech-
nically this is done using the GIVE and TAKE behav-
iors.
5 CASE STUDY
This section illustrates the presented transformations
on a real-world case study. The case study is an appli-
cation from production automation. In this paper only
a brief and informal description of it is given. A more
detailed description of the application and a report on
safety/self-healing related questions may be found in
(G¨udemann et al., 2006b; G¨udemann et al., 2006).
5.1 Application
The example describes a vision of tomorrow‘s pro-
duction systems. In contrast to a traditional pro-
duction cell, where the interaction between robots is
fixed, a new adaptive production cell will dynami-
cally change its interaction schemes. In the example,
assume a production cell consisting of three robots,
which are connected with autonomous transportation
units.
3
Not all agents have all three parts. For examples agents
which produce or consume resources do not have TAKE
resp. GIVE.
IMPLEMENTING ORGANIC COMPUTING SYSTEMS WITH AGENTSERVICE
67
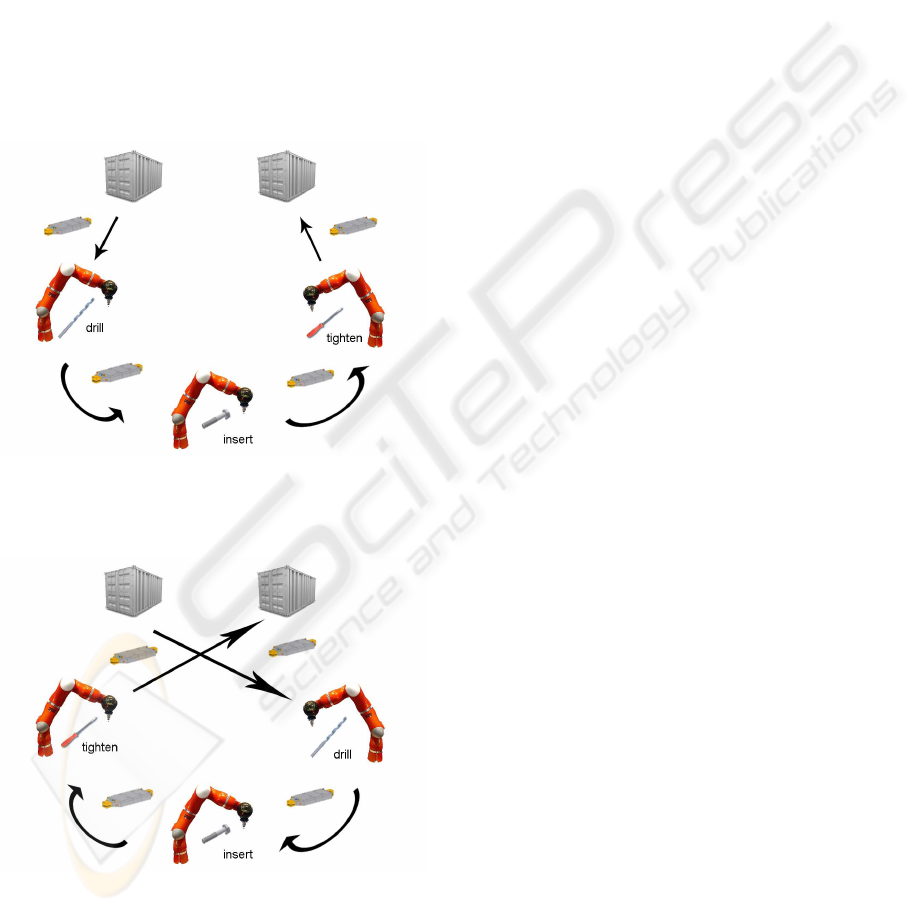
The functional goal of the cell is to process work-
pieces following a given specification. Every robot
can accomplish three tasks: drilling a hole in a work-
piece, inserting a screw into a drilled hole and tighten-
ing an inserted screw. These tasks are done with three
different tools that can be switched. One scenario is,
that every workpiece must be processed with all three
tools in a given order (1st: Drill, 2nd: Inserter, 3rd:
Screwdriver). Workpieces are transported from and
to the robots by autonomous carts. Changing the tool
of a robot requires a lot of time (compared to using
it). Therefore the standard role allocation of the sys-
tem is to spread out the three tasks between the three
robots, and the carts transfer workpieces accordingly.
This situation is shown in Fig. 3.
Figure 3: The adaptive production cell.
Figure 4: Reconfigured production cell.
If now one robot has some kind of defect (for ex-
ample the drill of robot 1 brakes), then the cell can
reconfigure itself, such that production is again pos-
sible. This situation is shown in Fig. 4. Robot 3
and Robot 1 have switched their jobs and the carts
changed their routes accordingly. Other reconfigura-
tions work analogously.
5.2 The Application as Instance of the
Design Pattern
This example system is now designed using the ODP.
Fig. 5 shows the resulting design as an instantiation of
the organic design pattern. Some classes in this figure
carry a link to the corresponding super element of the
design pattern in the upper right corner.
The production cell model comprises three types
of Agents: Robots, AutonomousCarts and Storages.
Each agent encapsulates the functionality of the cor-
responding functional part of the system.
The capabilities of robots are Tools, autonomous
carts can Transport workpieces and storages can Store
workpieces. Each robot is equipped with a Drill, an
Inserter and a Screwdriver. Therefore Robot agents
get corresponding capabilities: Drill, Inserter and
Screwdriver. Due to the nature of the system Work-
pieces (instances of Resource) can only be given from
Robots (or Storages) to Carts or vice versa. This is
captured by restricting Input and Output associations.
The Task is a description of what has to be done
with the Resources. In the example: “first drill a hole
(use Drill), then insert a screw (use Inserter) and fi-
nally tighten the screw (use Screwdriver)”. A Robot-
Role defines which tool a robot has to use, from which
carts it is supposed to pickup workpieces and to which
carts it should give the workpieces.
This case study showed, that the organic design
pattern can be applied to organic applications without
difficulty. It turned out that the separation of func-
tional and organic aspects during the design process
is possible and very useful. Note, that only the static
aspects of the system are modeled and the reconfig-
uration is captured in the VirtualCentralizedO/C. The
next step to be done is to extend the pattern, espe-
cially the VirtualCentralizedO/C, with adequate soft-
ware engineering methods to include the currently
missing dynamics in the development process. A
more detailed discussion on modelling this case study
as an instance of ODP may be found in (Seebach
et al., 2007).
5.3 The Case Study in AgentService
The generic mapping of ODP to AgentService was
applied to this case study. Exemplary for all parts
of the case study, the mapping of robot agents is de-
scribed in a little more detail now. As mentioned
above, robot agents have three different capabilities
(Drill, Inserter, Screwdriver). They can give and take
ENASE 2008 - International Conference on Evaluation of Novel Approaches to Software Engineering
68

Figure 5: Instantiation of the organic design pattern for the adaptive production cell.
instances only from and to carts and they will per-
form their assigned role, whenever a workpiece is
available. If a tool brakes the robot triggers a re-
configuration of the production cell which ultimately
leads to a new role allocation by the virtual Ob-
server/Controller. The following paragraphs show
how this behavior is modeled in AgentService with
the help of ODP artifacts.
Every agent contains a message filter which dis-
patches incoming conversationsto the behavior which
handles the protocol case. This filter receives the first
message of a conversation and creates – depending
on the message’s content – a new behavior instance
which will handle the protocol. E.g. a Cart connects
to a robot and sends a “READY-FOR-UNLOADING”
message, thus indicating that it is currently carrying a
workpiece. The robot acknowledges the message and
starts the TakeWorkpieceFromCart behavior which is
an instance of the abstract TAKE behavior outlined in
section 4. The agent waits until a currently processed
workpiece has been retrieved by another cart and then
initiates a new conversation to the waiting cart. It sig-
nals that it is ready to get the workpiece from the cart,
the workpiece is transmitted and the cart is dismissed.
After the workpiece has been received, the behavior
ProcessWorkpiece (DO) is started. Now, the work-
piece is transformed according to the current role of
the Robot. The generic ProcessWorkpiece behavior
looks up the agent’s role in the corresponding knowl-
edge and compares it to the capabilities available to
the robot. If the role is part of the capabilities, the
workpiece is processed. After processing, the robot
checks if there is a cart available to pick up the work-
piece or waits for a cart to arrive. The cart must
announce its availability by sending a “READY-FOR-
PICKUP” message to the robot. When the cart has ar-
rived, the GIVEWorkpieceToCart behavior (GIVE) is
instantiated to transmit the workpiece to the cart. Af-
ter the protocol has finished, the loaded cart proceeds
to the next way point on its route and the robot is
ready to receive another workpiece. Note, that in this
implementation communication is asymmetric. Carts
are always the actors, who initially send messages.
Choosing symmetric or asymmetric communication
and deciding, which types of agents initiate commu-
nications is a domain specific design decision.
All agents can be reconfigured by the VirtualCen-
tralizedO/C, which is also implemented as an agent
in the following called O/C-agent. If one of the
agents indicates a failure to the O/C-agent, a “BEGIN-
RECONFIGURE” message is sent to all peers. On re-
ception of such a message, the robot aborts its on-
going conversations and all currently performed tasks
and sends its current configuration (i.e. the HAS
IMPLEMENTING ORGANIC COMPUTING SYSTEMS WITH AGENTSERVICE
69

knowledge containing its capabilities) to the O/C-
agent (this is done by a specific RECONFIGURE be-
havior). By accumulating all received configuration
data, the O/C-agent can compute optimal solutions.
Currently, the collected data is discarded and an al-
ternate, predefined configuration is transmitted to the
agents. Implementing different algorithms is current
work (right now constraint solvers like ALLOY (Jack-
son, 2000) are under evaluation). As different re-
configuration algorithms do not have an influence on
the implementation of the system (besides the O/C-
agent), we will not go into more detail on computing
Role Allocations.
After a Role Allocation has been computed, the
the new DO knowledges are distributed among the
agents. For the robot this means in most cases that
it “switches its tool and changes the carts from/to
which it takes/gives workpieces”, e.g. from Drill to
Screwdriver. If this happens, it is usually necessary
to reroute the carts to reflect the new order of the
robots. After the exchange is complete all agents re-
set themselves and indicate their ability to continue
normal operation to the O/C-agent (implemented as
READY behavior). As soon as the O/C-agent has re-
ceived acknowledgments from all agents it resumes
the application by sending a “BEGIN-OPERATION”
message. RECONFIGURATION and READY behav-
iors are shared by all agent classes. The O/C-agent
uses one behavior to handle the communication dur-
ing a reconfiguration cycle and one to generate the
new role allocation. The latter behavior is a stub and
can be used to implement the algorithm for this task
in the future.
Summary: The case study showed, that the
generic implementation helps a lot for building Or-
ganic Computing systems. A broad class of sys-
tems can be conveniently designed using the Or-
ganic Design Pattern. The presented architecture
gives a good guideline for implementation. Never-
theless some additional design decisions (like choice
of communication) have to be made during this pro-
cess. On the other hand this allows for more ef-
ficient implementations. Technically, we made the
experience that AgentService is still a very young
framework. In particular, memory leaks appear dur-
ing runtime relatively frequently. As allocation and
de-allocation of knowledges is handled very deeply
within the AgentService runtime, we were not able
to ultimately solve these problems. We are in touch
with the AgentService developers in Genoa and it can
be hoped, that these problems will be solved in the
near future. We also connected the presented control
system to a physical simulation of the adaptive pro-
duction cell (using Microsofts Robotics Studio (Mi-
crosoft, )). This showed, that communication over-
head (introduce by a multi-agent platform) is not an
issue.
6 CONCLUSIONS
Organic Computing systems offer the door to a new
generation of software controlled systems. Their self-
X properties make them interesting for many domains
where dependability is an important aspect. On the
other hand, design, analysis, and construction of such
systems is a difficulttask. A useful aid in these project
stages is the use of guidelines and patterns.
In this paper we presented a design pattern for or-
ganic computing applications and a method for im-
plementation using C# and the multi-agentframework
AgentService. It turned out that a generic implemen-
tation is possible and that it is of great help when
building specific applications. The current state of
work only allows for a centralized controller and is
thus trimmed for medium scale applications, where
the number of agents is limited (<100) and computa-
tion time is not scarce. In future work a decentralized
controller using leader election seems not to difficult
to implement.
When evaluating the implementation of the case
study, some minor technical problems with AgentSer-
vice’s libraries (i.e. memory leaks) were found. For
this reason the implementation of the case study took
longer than expected and some restrictions to func-
tionalities had to be applied. However, there is hoped
that these problems will be solved with the next ver-
sion of AgentService. It is also interesting to see how
efficiently other case studies can be implemented with
this generic implementation. Another open topic is
to compare the presented C# implementation with a
JAVA based generic implementation using the Jadex
framework.
REFERENCES
Boccalatte, A., Gozzi, A., Grosso, A., and Vecchiola, C.
(2004). Agentservice. In Maurer, F. and Ruhe, G.,
editors, SEKE, pages 45–50.
Boccalatte, A., Grosso, A., and Vecchiola, C. (2006). Im-
plementing a mobile agent infrastructure on the .net
framework. 4th International Conference in Central
Europe on .NET Technologies.
Branke, J., Mnif, M., M¨uller-Schloer, C., Prothmann, H.,
Richter, U., Rochner, F., and Schmeck, H. (2006).
Organic Computing – Addressing complexity by con-
trolled self-organization. In Proceedings of the 2nd In-
ternational Symposium on Leveraging Applications of
ENASE 2008 - International Conference on Evaluation of Novel Approaches to Software Engineering
70

Formal Methods, Verification and Validation (ISoLA
2006).
FIPA ACL (2002). FIPA ACL Message Structure Specifica-
tion. http://www.fipa.org/specs/fipa00061/.
FIPA Website (1996). FIPA, Foundation for Intelligent
Physical Agents. http://www.fipa.org/.
G¨udemann, M., Ortmeier, F., and Reif, W. (2006a). Formal
modeling and verification of systems with self-x prop-
erties. In Autonomic and Trusted Computing 2006,
Proceedings. Springer LNCS.
G¨udemann, M., Ortmeier, F., and Reif, W. (2006b). Formal
modeling and verification of systems with self-x prop-
erties. In Yang, L. T., Jin, H., Ma, J., and Ungerer, T.,
editors, Proceedings of the Third International Con-
ference on Autonomic and Trusted Computing (ATC-
06), volume 4158 of Lecture Notes in Computer Sci-
ence, pages 38–47, Berlin/Heidelberg. Springer.
G¨udemann, M., Ortmeier, F., and Reif, W. (2006). Safety
and dependability analysis of self-adaptive systems.
In Proceedings of ISoLA 2006, 2nd Symposium on
Leveraging Applications of Formal Methods, Verifica-
tion and Validation. IEEE CS Press.
Jackson, D. (2000). Automating first-order relational logic.
In Proceedings of the ACM SIGSOFT 8th Interna-
tional Symposium on the Foundations of Software En-
gineering (FSE-00), volume 25, 6 of ACM Software
Engineering Notes, pages pp. 130 – 139. ACM press.
Microsoft. Microsoft robotics studio developer center.
M¨uller-Schloer, C., von der Malsburg, C., and W¨urtz, R. P.
(2004). Organic computing. Informatik Spektrum,
27(4):332–336.
Object Management Group, O. (2003). UML 2.0 OCL
Specification.
Seebach, H., Ortmeier, F., and Reif, W. (2007). Design
and Construction of Organic Computing Systems. In
Proceedings of the IEEE Congress on Evolutionary
Computation 2007. IEEE Computer Society Press. ac-
cepted for publication.
IMPLEMENTING ORGANIC COMPUTING SYSTEMS WITH AGENTSERVICE
71
