
AN APPROACH TO THE DEVELOPMENT OF PROGRAMMING
SOFTWARE FOR DISTRIBUTED COMPUTING AND
INFORMATION PROCESSING SYSTEMS
V. P. Kutepov, V. N. Malanin and N. A. Pankov
Moscow Power Engineering Institute (Technical Univerity), Krasnokazarmennaya 14, Moscow, Russia
Keywords: Flow-graph stream parallel programming language, distributed computing systems, data-flow programming,
scheduling.
Abstract: The problem of software development for distributed and parallel computing systems is considered in the
paper. Its original issue is in extending our projecting work on parallel programming languages and
operational tools for their realization on large scale computing systems.
1 INTRODUCTION
The problem of integration of distributed computing
and information processing resources in order to
achieve reasonable productivity and efficiency of
their usage in practice is very complicated as well as
far from satisfactory solution. Parallel computing
systems, distributed databases and information
systems are well known samples of the nontrivial
distributed systems; each of them has its own
problems and solutions. In this paper we are going to
discuss the main features of our approach to
development of software for distributed computing
and information processing systems (DCIPS) that
are of fundamental value when we look forward in
order to outline contours of the future global
distributed information systems in particular GRID.
Many of stated in the paper are resulted from our
experience of development of parallel programming
languages and operational tools for their
implementation on computer systems [2,3].
2 MAIN FEATURES AND
PROBLEMS OF DCIPS
In this paper we intentionally use notion of DCIPS
instead of GRID to focus on specific technical
features of such systems not going into details on
their social and economical matters. These features
are:
Multi-component structure with geographically
distributed components and strictly specified
functions;
Dynamic structure alteration issued by the
necessity for reconfiguration in order to
manage load or because of components’
failure;
Parallelism referred to multiple asynchronous
interactions between components;
Relentless evolution of hardware and software
base.
The main problems of DCIPS management and
software development are:
Integration of heterogeneous computing and
communication hardware: computers,
communication channels, storages, etc.;
Creation of new parallel programming
languages, instruments and operational tools
supporting high level program development;
Effective resource management and processes
(jobs) scheduling as well as high reliability
and fast failure recovery.
The first problem is being addressed to
standardization and virtualization on different levels
of hardware and software stack of DCIPS. Great
contribution was made by the Grid community in the
development of OGSI and its famous
implementation Globus Toolkit (Foster I. et al,
2001). Actually the main Grid-tailored activities are
in the integration area.
The second problem is of many aspects and besides
development of high level programming languages
83
P. Kutepov V., N. Malanin V. and A. Pankov N. (2008).
AN APPROACH TO THE DEVELOPMENT OF PROGRAMMING SOFTWARE FOR DISTRIBUTED COMPUTING AND INFORMATION PROCESSING
SYSTEMS.
In Proceedings of the Third International Conference on Software and Data Technologies - PL/DPS/KE, pages 83-90
DOI: 10.5220/0001889400830090
Copyright
c
SciTePress

supporting different types of parallelism of real tasks
and processes it suggests necessity of various
instruments for debugging, verification, evaluation
of complexity parameters and criteria for program’s
execution efficiency in distributed environment
(Kutepov V.P et al, 1996).
The third problem is the most far from satisfactory
solution for DCIPS such as GRID - large
heterogeneous computing and information systems.
Even for homogeneous computing systems, in
particular clusters, various heuristics and on a knife
edge solutions are used in order to get reasonable
effect in scheduling processes and managing
workload (Kutepov V.P., 2007).
In the following we summarize how approaches
which we apply to solve these last two problems for
clusters could be extended to DCIPS.
3 LANGUAGES AND
INSTRUMENTS FOR DCIPS
PROGRAMMING
The main purpose of a programming language is to
reduce conceptual gap that always exists between a
problem domain, ingenuous description of a problem
or task, program developed to solve the problem and
a computer system used for program execution. It’s
well known that the nearer programming language to
the computer system – the more effective programs
can be developed.
Next requirements are the most important for
language oriented to support high level program
development for DCIPS:
Component-like style of program development;
Well-defined forms of structural representation
of program making the process of program
development easy expressible; these structural
forms should simplify process of debugging
and analyzing of program as well as mapping
it to DCIPS structure;
Ability to support various forms of parallelism
inherent in operation of DCIPS itself and
programs created for them;
Wide and flexible mechanisms for defining
complex data structures and scaling structure
of a program with the change of complexity of
the data it should be applied to;
Portability suggesting possibility of program
component development by using the most
suitable conventional programming languages.
None of currently existing DCIPS programming
models fully comply stated requirements: MPI
implementations lack well-defined structural
representation of the program as well as good
support for DCIPS parallelism; remote procedure
call (RPC) and remote methods invocation (RMI)
models including CORBA are rather low-level for
parallelism representation and become very tricky
when program reaches some level of complexity
providing very limited capabilities for debugging.
In (Kutepov V.P et al, 1996) we have considered
generalized architecture of programming
environment for large scale computing systems
which can be also retranslated to DCIPS.
Below we give short description of Flow-graph
Stream Parallel Programming Language (FSPPL)
that was developed for supporting high level
component-like parallel programming for parallel
computing systems (Kotlyarov D.V. et al, 2005) and
which can be easily embedded in object oriented
media of programming and adopted for the needs of
DCIPS programming.
4 FLOW-GRAPH STREAM
PARALLEL PROGRAMMING
LANGUAGE
Formally, flow-graph parallel program (FGPP) in
FSPPL is represented as a pair <FS, I>, where FS is
a flow-graph scheme and I – interpretation.
FS = <{M
i
| i=1, 2,...n, n∈N }, P
IN
, P
OUT
C>, where
{M
i
} is a set of modules, P
IN
and P
OUT
are sets of all
input and output points of all modules respectively
and C is a connection function: P
IN
x P
OUT
Æ {true,
false}.
Every module M
i
is defined as M
i
= <Name,
{G
INi
m
i
}, {G
OUTi
k
i
}>, where m
i
,k
i
∈N, Name is a
module name, {G
INi
m
i
}and {G
OUTi
k
i
} are sets of
named input and output groups of the module
respectively.
Input group G
IN i
s
(s=1,2..m
i
) of module M
i
can be
described as a pair
<Name, P
IN i
s
>, where Name is a
name of input group, P
IN i
s
⊆
P
IN
– ordered set of
input points of this group. Output groups are defined
similarly with accuracy to the respective set of
output points.
Interpretation I of flow-graph parallel program is a
quadtuple I=<T, ℑ, C
1
, C
2
>, where T = {t
i
| i=1,2,...
n, n∈N } – set of data types, ℑ - set of methods or
subprograms (Kotlyarov D.V. et al, 2005) associated
with input groups of modules; C
1
: P
IN
∪ P
OUT
Æ T is
a points typifying function and
C
2
:
ℑ→= }1..ni{P
i
m
i
IN
is a function associating a
ICSOFT 2008 - International Conference on Software and Data Technologies
84
method in ℑ with every input group of every
module. It is supposed that method associated with
input group G
IN i
s
(s=1,2..m
i
) of module M
i
has
ordered set of formal parameters which types match
with types of relative points in
P
IN i
s
. If a set of input
points
P
IN i
s
of input group
G
IN i
s
is empty then
corresponding method should have no formal
parameters.
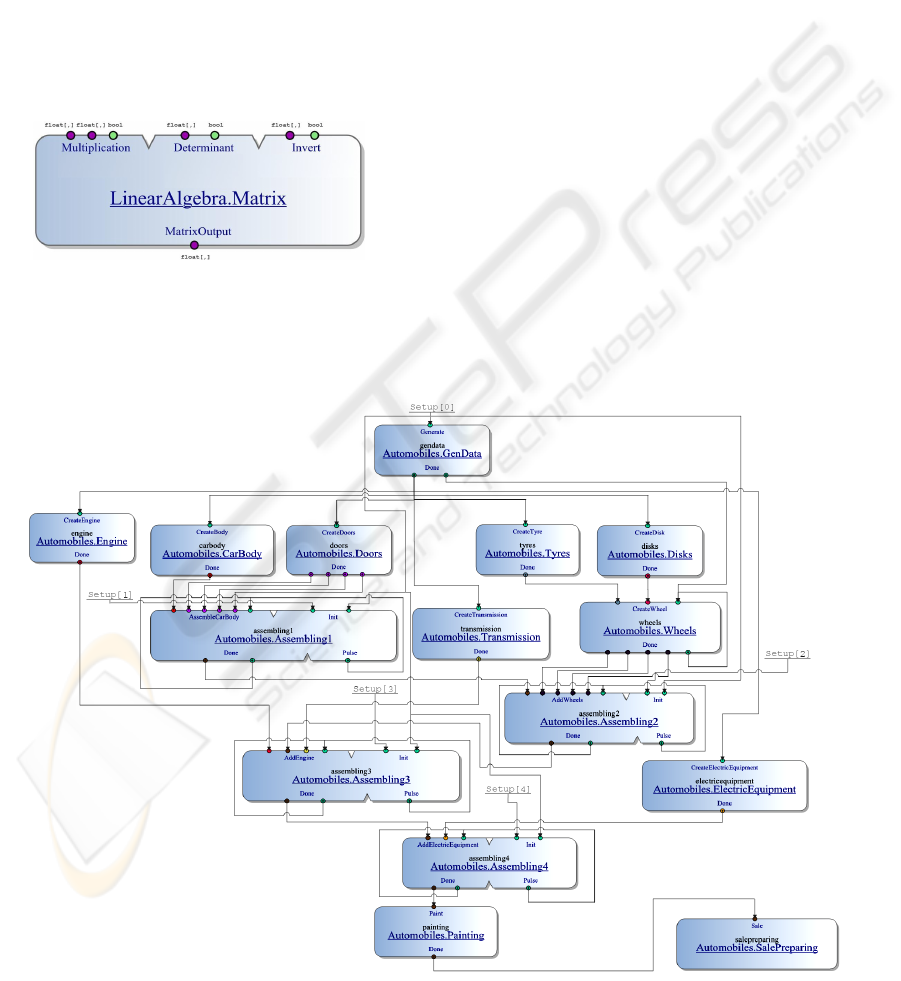
The representation of a module is given in figure 1
and it shows inputs and outputs of the module that
are divided by groups and typified. Connections
between outputs and inputs of modules of FS should
satisfy condition that connecting points should be of
the same type.
Figure 1: Visual representation of a module.
In figure 2 an example of flow-graph scheme is
given which represents a program of assembly line
for car manufacturing.
4.1 Operational Semantics of FGSPPL
Parallel execution process of FGPP is represented as
a sequence of alternating states, where each state is
characterized by a set of processes induced by
invocation of methods from ℑ (Kotlyarov D.V. et al,
2005).
The process of FGPP execution is a consequence
of the following rules:
• A FGPP module M
i
is assumed to be ready for
running by input group P
IN
i
j
with the data tuple,
marked by tag t, if all its input points (in the
corresponding memory buffers) have data marked
by the same tag t.
• If module M
i
is ready for execution by P
IN
i
j
with
data tuples, marked by tags
t
1
,…,t
k,
k processes,
each of which is uniquely identified by the own
tag t
j
, can be simultaneously dispatched for
execution.
• Modules with input groups without input points
(which correspond to methods with an empty set
of formal parameters) are assumed to be ready for
execution by these input groups at the time of the
FGPP execution initialization; however the
processes induced by them can be generated only
once.
Figure 2: Flow-graph scheme for car assembly line.
AN APPROACH TO THE DEVELOPMENT OF PROGRAMMING SOFTWARE FOR DISTRIBUTED COMPUTING
AND INFORMATION PROCESSING SYSTEMS
85

• Process of FGPP execution is considered to be
finished, when any module is not ready for
execution and all the processes induced during
FGPP execution are completed (terminated).
• During the execution method can use special-
purpose functions WRITE, READ, and CHECK,
which provide an interface between modules.
a. WRITE function conducts write in the giving
output point of the giving output group, with
the specified value marked specified tag, and
has the format: WRITE (<name of output
group>, <output>, <tag>, <value>).
b. READ function allows the process to read data
with the indicated tag from buffers assigned to
the input groups of the module that initiated the
process. The data with indicated tag retrieved
from the listed inputs are assigned to variables
in the process - input value. Format of READ
function: < input value > = READ (<name of
input group>, <input>, <tag>). In the execution
of READ function, if the requested data have
not yet arrived to the buffer memory, the
execution is delayed until the data arrive. The
arrival time is controlled for any recording of
data into the buffer memory of the
corresponding input group. When READ
function returns, the requested data are deleted
from the buffer.
c. For more sophisticated operation with data
arriving to module input group (to be more
precise, with the assigned buffers), the function
<availability flag> = CHECK (<name of input
group>, < input>, <tag>) is provided, which
checks the availability of data with the
indicated tags at the specified input point, and
returns TRUE as result, if such data is present
at the buffer, and FA L S E – otherwise. This
function allows the process to make a decision
on its actions depending on the data
availability.
The following forms of parallelism that objectively
present in DCIPS and real-world tasks (Kutepov V.P
et al, 1996) are easily represented in FGSPPL:
Parallelism of data-independent fragments;
Data parallelism (SIMD parallelism by Flinn)
that is induced by simultaneous application of
method to several differently tagged data
tuples;
Pipeline parallelism resulted from stream-like
processing of data.
FGSPPL naturally combines the opportunities of
gross-grain parallelism representation (that is
realized at the level of the modules’ methods) and
fine-grain parallelism that is represented in methods
of modules and can be implemented by
multithreading.
Our experience in FGPPL programming shows that
FGPPL allows to build adequate and often straight
structure models of mass-service networks,
distributed and many component systems, we have a
positive experience in describing on FSPPL the
distributed control processes of flexible automated
manufactures, airports, etc, as well as multi-
component program systems, where information
relations are structured and permanent.
5 EMBEDDING FSPPL INTO
OBJECT-ORIENTED
ENVIRONMENT
Embedding FSPPL into object oriented environment
is an important and apparent way to reach
comprehensive requirements stated in part 3 of the
paper, in particular to provide language support for
complex data modelling. On the other side this
embedding should enrich object-oriented language
with dataflow superstructure on top for more flexible
parallelism support. Such approach has already been
considered as an important extension of object
oriented systems (
J.Paul Morrison., 1994).
Reusability of program code in object-oriented
programming can be reached at different levels of
abstraction starting from procedures, data structures,
and classes and up to logically and physically
connected sets of classes. Using these systems of
classes in architecture of an application implies
using of built-in object interacting schemas in
runtime. These systems of classes delivering
services in some area are usually called integrated
libraries.
We’ve adopted the idea of integrated library to
embed FSPPL into object-oriented environment.
FGPP implemented with the library is called object-
oriented FGPP (OOFGPP).
To build the integrated library for flow-graph
stream parallel programming we have applied
methods of object-oriented analysis for abstract
FGPP, its syntax and parallel semantics. Using
object-oriented decomposition we constructed the
set of base classes that allows describing main
objects of FGPP: scheme, module, input group,
output group, input and output points and defined
mechanisms of their interaction as private methods.
Now to build the OOFGPP developer has to
implement a number of standardized abstract classes
exposed by the library.
The embedding of FSPPL into OO environment
enables developer to treat elements of parallel
ICSOFT 2008 - International Conference on Software and Data Technologies
86

program as objects that allows using OO
mechanisms such as polymorphism, encapsulation
and inheritance while designing the parallel
program. The largest impact this causes on the
structure of data flows between modules: that is now
the objects can be sent between modules as usual
data. This implies that developer can send objects of
different classes derived from one parent class from
one module to another and depending on class
different methods can be applied to this object inside
module procedure due to polymorphism.
While designing the library we used the most
general constructions that are available in any
modern object-oriented platform. In current
implementation we have chosen .NET CLR platform
to build it.
For effective usage of this library it’s important to
deliver a full range of instruments that covers the whole
process of OOFGPP design, implementation and
execution on a target computer system (DCIPS). In the
next part of the paper we will describe the developed
environment for parallel programming based on the
integrated library that includes all those instruments.
6 OBJECT-ORIENTED
ENVIRONMENT FOR
PARALLEL PROGRAMMING
The following requirements in implementation of
the described above concept and language tools of
object-oriented parallel programming were taken
into account:
Architecture of the environment should be built
on component basis with strict division of the
functions between them. Specifically, the
following functions are strictly distinct in the
developed environment:
• Support of parallel program development
process;
• Remote access organization;
• Management of parallel program
execution process on DCIPS;
• Management of processes and threads on
DCIPS.
The environment should use original algorithms
for management of the workload, which allow
supporting dynamically the effective usage of
resources and decreasing parallel program
execution time (see part 7 of this paper).
The environment should be built as open
and expandable, in particular the development
of subsystem for fault tolerance ensuring
parallel cluster work is carried out now as a
new component of it.
The software should have portability in its
software realization and make availability to
be applied on different computer platforms
with different OS.
Let’s briefly review the components of the
developed environment.
1. Client software: FSPPL Integration
Package.
This component is intended for managing interaction
between user and the system. The component is
integrated into popular integrated development
environment (IDE) Microsoft® Visual Studio® (VS)
2005/8 and covers the full lifecycle of parallel
program. It includes a VS project template that fully
complies with the developed principles of design
and realization of the parallel distributed programs
using FSPPL. The component also contains
specialized editor of the graph structures for creating
and editing parallel program schemes. Program code
on chosen programming language (VB, MC++, C#,
J#) is generated based on the created schemes.
Module of program configuration provides
services for setting the parameters of parallel
program execution on cluster, or other DCIPS
namely it allows developer to do initial mapping of
the parallel program’s scheme (its modules) to the
nodes of the DCIPS (the analogue of machine file
for MPI). Module of parallel program execution
control data on load of the remote nodes to user and
allows controlling the execution process of the
parallel program.
2. Web interaction.
This component is a layer between of all
distributed software components like client package
and software for DCIPS nodes. The component is a
Web-service performing two functions:
Receiving user commands for the execution
software and initiating appropriate actions;
Providing to the client software an access to the
data on nodes load and task completion status.
The component has access to the system
database, which contains data on registered users
and their tasks which were executed on the target
DCIPS.
3. Program execution management software.
General principle of management architecture is a
hierarchical decentralized organization when nodes
of DCIPS are divided into groups (see figure 3).
Group server performs the following functions:
Periodically obtaining data on load of the
controlled nodes;
Management of the group workload by
relocation of the processes between nodes
AN APPROACH TO THE DEVELOPMENT OF PROGRAMMING SOFTWARE FOR DISTRIBUTED COMPUTING
AND INFORMATION PROCESSING SYSTEMS
87
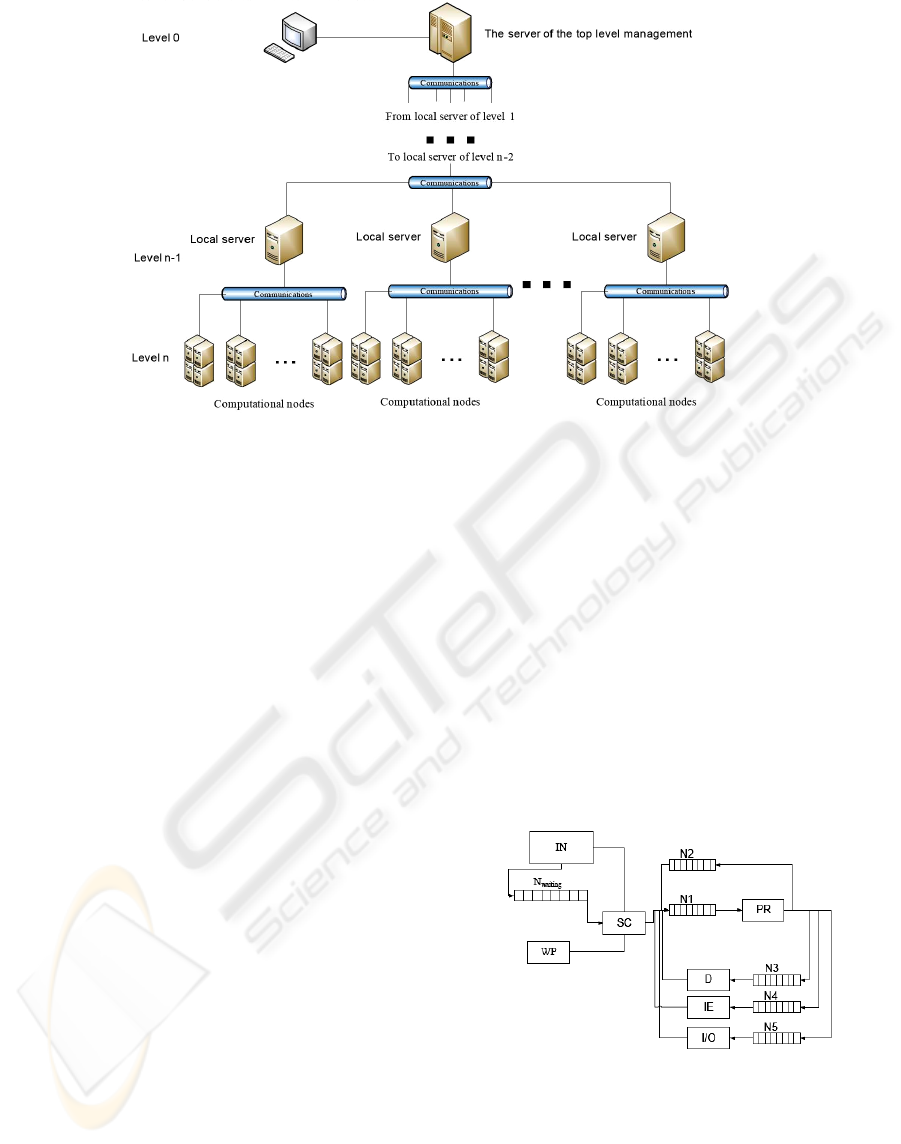
Figure 3: Architecture of DCIPS management.
based on obtained load data;
Reconfiguration issued by failures or new
systems discovery and administration.
Servers of higher levels perform the similar
functions for subordinated groups.
Node management performs the following functions:
Control of processes generation and, interaction
with other processes, including those on other
computers;
Processes planning;
Parameters measurement of the node load,
processing of these parameters in order to
forecast their future values and transfer to the
server;
Reaction to the server commands.
7 SCHEDULING PROCESSES IN
COMPUTER OF DCIPS
Let us consider in what way the processes
management at DCIPS nodes should be organized.
The contemporary operating systems provide multi-
tasking, using for this purpose the round-robin
servicing discipline, which gives the advantage in
the execution to short tasks or processes. It is the
essential, if the user along with the programs
execution carries out the debugging and other
procedures and would like to receive the quick reply.
In figure 4 the scheme of processes service
organization at node is shown, taking into account
embedded scheduling processes in OS. In figure 4
the program block of the measurement of the
workload parameters (WP) cooperating with the OS,
implements the functions of the periodic
measurement, averaging and forecasting of the
computer workload parameters:
Li(t) – workload of the i-th computer at the
moment t, defined as the workload of its
processor (the part time of its useful work);
λi′(t) – intensity of the pages exchange with the
disk memory;
λi′′(t) – intensity of inter-computer exchanges;
λi′′′(t) – intensity of the input-output commands
occurrence in the running processes;
Vi(t) – free memory of the computer;
N(i)waiting(t) – set of the waiting for the
execution processes.
Figure 4: The organization of processes management at
DCIPS node.
An interpreter (IN) of the parallel programs places
the processes in the queue N
waiting
induced during
execution of a program on processor (PR). A
scheduler (SC) removes a part of these processes to
the queue N
1
from which PR takes processes for
ICSOFT 2008 - International Conference on Software and Data Technologies
88
execution in the round-robin order. The processes in
the queues N
3
, N
4
, N
5
are waiting for execution of
the exchange of pages with disk memory (D), the
inter-computer data exchange (IE) and input/output
(I/O) respectively. The SC can delay a part of being
executed processes and place them in the queue N
2
in a case if a number of active processes
N
active
=N
1
∪N
2
∪N
3
∪N
4
∪N
5
is redundant and high
swapping (great value of λ
i
′) is provoked.
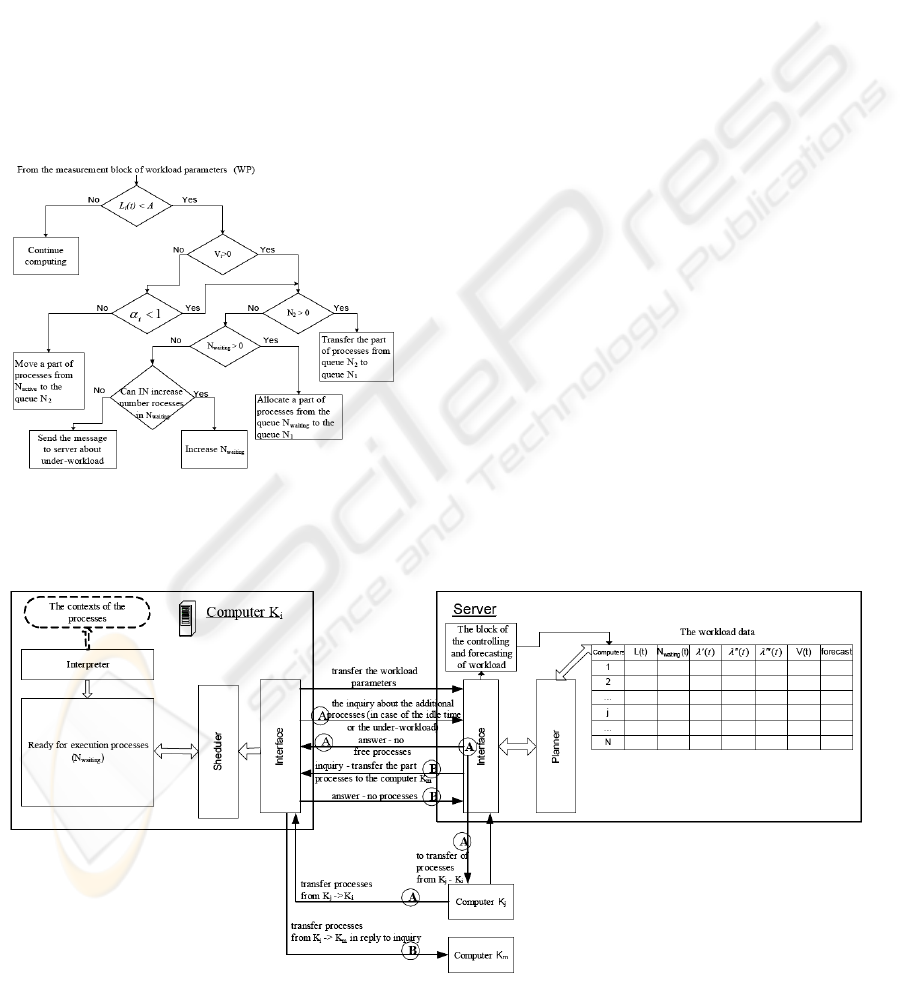
The developed algorithm of scheduling processes
on a node is given in figure 5. In this figure α
i
=λ
i
′/μ
i
- loading factor of the paging system (μ
i
– paging
system capacity). A – some experimentally derived
threshold constant, by which the level of the
computer workload is regulated.
Figure 5: Scheduling processes in the computer.
8 SERVER FUNCTIONS IN
MANAGING DCIPS
WORKLOAD
The server is intended for the regulation of the nodes
load, aiming to minimize the idle time of the
processors due to the dynamic relocation of the
processes and increasing the number of ready for
execution on processes.
The server periodically obtains the data about the
workload of its subordinated computers and
forecasts its change. The scheme and the logic of the
server interaction with the group computers are
shown in figure 6.
In figure 6 the designations A and B on the
arrows show the possible alternatives of the
corresponding decisions about the redistribution of
processes between computers during their dialogue
with the server. At figure 6 all parameters of the load
represent the averaged values on some interval and
the forecast is the predicted values change of the
same parameters.
The problem of the accurate measurement of the
workload parameters is very important factor in
scheduling processes and managing workload (Neil
Gunther, 2005) in DCIPS. We performed wide the
experimental investigation in order to better
understand stochastic nature and the most significant
parameters which characterize a behavior of the
processes in computer systems (Kutepov V.P.,
2007). As the result we developed the simple
measurement and prediction workload parameters
algorithms with small time consuming for their
operation.
Figure 6: Scheme of interaction between server and controlled nodes.
AN APPROACH TO THE DEVELOPMENT OF PROGRAMMING SOFTWARE FOR DISTRIBUTED COMPUTING
AND INFORMATION PROCESSING SYSTEMS
89

9 CONCLUSIONS
It is a great willing to conclude the paper with
optimistic wave bypassing many stones on the road
of the comprehensive solution of DCIPS
programming problem. The dream of deep
automation of programming process is immortal as
well as difficultly reachable as we now
acknowledge. Development of software for various
DCIPS is more difficult task inheriting the main
problems of previous one. Probably more intensive
cooperation of the researchers’ efforts is necessary
in order to yield general conceptual and theoretical
platform for DCIPS software development that
allows to say that they performed work successfully.
As for our project we are planning to integrate
operational tools with mentioned above globus
toolkit platform.
REFERENCES
Kutepov V. P., 1996 In. «On Intelligent Computers and
Large Scale New-Generation Computer Systems».
Journal of Computer and Systems Sciences
International, vol. 35, no. 5.
Kotlyarov D. V., Kutepov V. P., Osipov M. A., 2005. In
“Flowgraph Stream Parallel Programming and Its
Implementation on Cluster Systems”, Journal of
Computer and Systems Sciences International, Vol. 44,
No. 1, pp. 70-89.
Bazhanov S. E., Kutepov V. P., Shestakov D. A., 2005. In
«Functional Parallel Typified Language and Its
Implementation on Clusters». Programming and
Computer Software 31(5).
Kutepov V. P., 2007, In «Intelligent scheluding processes
and controlling workload in computing systems».
Journal of Computer and Systems Sciences
International, vol. 46, no. 5.
Dr. Neil Gunther, 2005. In Load, Average Part I: How It
Works. TeamQuest Corporation.
J.Paul Morrison., 1994. In Flow-based Programming: A
new Approach to Application Development, Van
Nostrand Reinhold.
Foster I., Kesselman C. And Tuecke S., 2001. In The
anatomy of the grid: enabling scalable virtual
organizations. International J. Of supercomputer
Applications, N15 P.200-222,
www.globus.org/research/papers/anatomy.pdf
ICSOFT 2008 - International Conference on Software and Data Technologies
90
