
RIGOROUS COMMUNICATION MODELLING AT TRANSACTION
LEVEL WITH SYSTEMC
Tomi Metsälä
1,2
, Tomi Westerlund
2
, Seppo Virtanen
2
and Juha Plosila
2,3
1
Distributed Systems Design Laboratory, Turku Centre for Computer Science, Turku, Finland
2
Department of Information Technology, University of Turku, Turku, Finland
3
Academy of Finland, Research Council for Natural Sciences and Engineering, Finland
Keywords:
Embedded Systems, Formal Methods, Action Systems, SystemC.
Abstract:
We introduce a communication model for ActionC, a framework for rigorous development of embedded com-
puter systems. The concept of ActionC is the integration of SystemC, an informal design language, and Action
Systems, a formal modelling language supporting verification and stepwise correctness-preserving refinement
of system models. The ActionC approach combines the possibility to use a formal correct-by-construct method
and an industry standard design language that also includes a simulation environment. Translation of an Ac-
tion Systems model to the corresponding ActionC model is carried out with the means provided by SystemC
and in a way that preserves the semantics of the underlying formal model. Hence, the ActionC framework
allows us to reliably simulate Action Systems descriptions using standard SystemC tools, which is especially
important for validating the initial formal specification of a system. Our initial experiments with ActionC have
successfully produced correct-proven simulatable SystemC descriptions of Action Systems.
1 INTRODUCTION
Verifying the correctness of a modern hardware or
HW/SW system design claims more time and effort
than ever before. Verification process of complex
multiprocessor and reconfigurable systems brings up
new challenges for both researchers and developers
in the industry. Verification by testbench simulation is
the prevailing approach to this issue. For this purpose,
there exists a wide variety of recently introduced new
verification languages, methods and tools. Another
approach to a system verification task includes the use
of formal methods. By specifying system in a formal
design language developer is able to verify the model
in a mathematically rigorous manner. Based on a for-
mal specification the design is correct by construction
and its logical behaviour does not need to be verified
by simulation. However, the industry lacks the type
of comprehensive tools that can be used in formal,
stepwise development of embedded HW/SW systems
throughout the design project all the way from ab-
stract specification down to implementable model.
In order to address this challenge we introduce
the idea of ActionC framework, which is the inte-
gration of the formal system specification language
Action Systems (Sere and Back, 1994) and the infor-
mal modelling and simulation environment SystemC
(The OSCI, 2005). Action Systems provides a rig-
orous method for specifying and verifying modular
HW/SW systems in addition to the refinement cal-
culus framework (Back, 1988), a stepwise develop-
ment environment for refining an abstract specifica-
tion down to a model that can be translated into a
suitable implementation. On the other hand, Sys-
temC is a programming library that is built on top of
the standard C++ programming language (Stroustrup,
1997). In addition to the object oriented techniques
provided by C++, SystemC offers the system designer
hardware-oriented functionality such as clocks, sig-
nals, reactivity and modelling of parallel processing.
With SystemC it is possible to gradually develop and
verify a HW/SW system design in its entirety without
the need to translate the hardware model into a sep-
arate hardware design language. In ActionC, Action
Systems provides a formal foundation for SystemC
modelling enabling the developer to produce a sim-
ulatable system description from an Action Systems
description while preserving the formal correctness
throughout the model’s refinement process as well as
during the simulation.
Inter-module communication is an essential fea-
ture in Action Systems modelling, and therefore it
will be addressed in this paper. We elaborate the way
in which Action Systems’ procedure based communi-
246
Metsälä T., Westerlund T., Virtanen S. and Plosila J. (2008).
RIGOROUS COMMUNICATION MODELLING AT TRANSACTION LEVEL WITH SYSTEMC.
In Proceedings of the Third International Conference on Software and Data Technologies - SE/GSDCA/MUSE, pages 246-251
DOI: 10.5220/0001900402460251
Copyright
c
SciTePress

cation model is implemented in the ActionC frame-
work with the means provided by SystemC.
Several other papers have also covered the issue
of improving SystemC by incorporating it with for-
mal design and verification methods. A general re-
view concerning SystemC and different formal veri-
fication method has been conducted for example by
Vardi in (Vardi, 2007). The integration of an inde-
pendent formal language into SystemC has been ex-
plored for example by Habibi and Tahar in (Habibi
and Tahar, 2005) and by Patel et al. in (Patel et al.,
2006). In the former a language called AsmL has been
used for the verification of transaction level models
of SystemC, while the latter integrates Bluespec and
SystemC in order to create rule-based MoCs for Sys-
temC. On the other hand, a tool for executing action
systems has been tested by Degerlund, Walden and
Sere in (Degerlund et al., 2007), in which they trans-
lated Action Systems models into C++ and executed
the translation with an experimental scheduler tool.
The paper is organised as follows: Action Systems
and SystemC are introduced in Sect. 2 and Sect. 3, re-
spectively, and in Sect. 4 they are viewed together as
the ActionC framework. Section 4 will also address
the implementation of the procedure based communi-
cation. Concluding remarks are provided in Sect. 5.
2 ACTION SYSTEMS
Action Systems is a design framework that can be
used in modelling complex parallel and reactive sys-
tems in a formal, mathematically rigorous manner
(Sere and Back, 1994). The Action Systems formal-
ism was initially proposed by Back and Kurki-Suonio
(Back and Kurki-Suonio, 1983) and it is based on
the guarded command languageby Dijkstra (Dijkstra,
1976). In Action Systems a system modelis described
according to the system’s logical behaviour. The be-
haviour is modelled in terms of atomic actions, which
are guarded commands that perform an operation for
a given set of system variables. Once chosen for ex-
ecution, atomic actions are executed to completion
without interference from other actions in the system.
Only the initial and final states of an atomic action are
observable in the environment. Parallelism between
actions can be modelled when they do not share any
variables that either or both of them write onto. In
such cases actions can be executed in any order with-
out affecting the final state.
The verification of total correctness of actions and
entire systems is based on the concept of weakest pre-
condition: for every action there exists a postcondi-
tion that can be established by properly executing and
sys F ifo ( exp Put(in x: Integer);
exp Get(out x: Integer); )
N : Natural := 8;
::
|[ variable
q: queue of Integer ; cnt: 0...N;
public procedure
Put(in x: Integer) : (q := q@hxi);
Get(out x: Integer): (x,q := head(q),tail(q));
action
waitPut : (cnt < N → await Put; cnt := cnt +1);
waitGet : (cnt > 0 → await Get; cnt := cnt − 1);
invariant
Range: 0 ≤ cnt ≤ N;
initialisation
q,cnt := h i, 0;
execution
do WaitPut 8 WaitGet od ]|
Figure 1: Description of the action system F ifo.
terminating the action statement. In that case the ex-
ecution of that action is guaranteed to lead the sys-
tem into a state that satisfies the weakest precondi-
tion. An initial system specification can be refined
into an implementable model using a method called
refinement calculus (Back and von Wright, 1998).
The final model is developed in a stepwise man-
ner preserving the verified correctness of the initial
model. Therefore, the design can be seen as correct-
by-construction at all stages of the process.
2.1 Action Systems Description
An action system is a module structure that offers an
encapsulated environment for local variables and ac-
tions that operate on them. Actions also use interface
procedures and variables in communicating with ac-
tions in other action systems. Private procedures are
used only within the local action system scope. Ex-
ecution of an action system is modelled with an ex-
ecution loop that runs the actions in a specific order,
which may or may not be deterministic.
As an example of an action system description,
Fig. 1 illustrates a simple transaction level FIFO struc-
ture, in which we can identify the three main sections
of the action system description: interface, declara-
tion and iteration. In this case, the interface part de-
clares communication procedures Put and Get that the
action system F ifo introduces and exports. The use
of communication procedures corresponds to a trans-
action level model with remote function calls. The in-
terface also introduces parameter N, a natural number,
that is set to value eight. The exported procedures are
imported by other action systems that require the ser-
vice that these procedures provide. Procedures are in
general any atomic actions, possibly with some auxil-
iary local variables that are initialised every time the
RIGOROUS COMMUNICATION MODELLING AT TRANSACTION LEVEL WITH SYSTEMC
247

procedure is called. The execution of a procedure is
considered as a part of the calling action, and thus
procedures can be considered as parametrisable sub-
actions. If an action system does not have any com-
munication variables or procedures, it is a closed ac-
tion system, otherwise it is an open action system.
In the declaration part the local variables, actions
as well as private and public procedures are defined.
The F ifo action system defines the Put and Get pro-
cedures. Put appends (the @-operation) the element,
given as a parameter,at the end of the queue type local
variable q. Get, on the other hand, returns the proce-
dure caller the head (the first element) of the queue,
while setting the tail (all elements except the first) as
the new value of the queue. Both actions waitPut and
waitGet perform an await command that passively
waits for a procedure call from an action system that
imports the procedure. When a call comes, a proce-
dure is executed with the rest of the statements in the
action. The action waitPut increments the local vari-
able cnt after executing Put, while the action waitGet
executes Get and decrements the variable cnt. Both
actions have their own guard, gd(), that must hold be-
fore the action’s body, bd(), is allowed to execute, e.g.
gd(Put) b= cnt < N and bd(Put) b= await Put; cnt :=
cnt + 1). The declaration part also defines the con-
straints that the actions must uphold. Here, a range
for the value of the variable cnt is introduced as a sys-
tem invariant. The operation of the action system is
started by initialisation in which the variables are set
to predefined values.
In the iteration part, that is, in the execution loop,
actions are selected for execution based on their com-
position and enabledness. This is continued until
there are no enabled actions, whereupon the computa-
tion suspends leaving the system in a state in which it
waits for an external impact that would enable its ac-
tions again. The operation of the F ifo action system
depends exclusively on the procedure calls coming
from other systems because of the await commands
in both of its two actions.
2.2 Procedure based Communication
As we learned in Sect. 2.1 the procedure based com-
munication model uses interface procedures to model
communication channels between action systems. Let
us consider an action system C lient (Fig. 2) and the
action system F ifo that was introduced earlier. Ac-
tion system C lient now imports the communication
procedure Get, which F ifo exports. The action pop
of the action system C lient uses the imported Get
procedure to retrieve the first element from the FIFO
(Fig. 3). The communicating actions pop of C lient
sys C lient (in on: Boolean; out result : Integer;
imp Get(in x: Integer); )
|[ variable
a: Integer;
action
pop: (on → call Get(a); result := a);
initialisation
result := 0;
execution
do pop od ]|
Figure 2: Description of the action system C lient.
F ifo
pop waitGet
Client
call Get await Get
Figure 3: Action system C lient retrieving data from action
system F i f o using the communication procedure Get.
and waitGet of F ifo are:
pop b= (pop
1
;call Get(a); pop
2
)
waitGet b= (waitGet
1
;await Get;waitGet
2
)
where pop
1,2
and waitGet
1,2
are subactions of
pop and waitGet, respectively. In this example,
pop
2
b= result := a and waitGet
2
b= cnt := cnt − 1,
while waitGet
1
b= cnt > 0 → skip and pop
1
b= on →
skip, where skip is an empty action. Furthermore,
the local variables of the systems are distinct, l
C lient
∩
l
F ifo
=
/
0, communication variables are a set g
C lient
∩
g
F ifo
and the initialisations of the communication
variables g
C lient
∩g
F ifo
are consistent with each other.
In general, the body of a communication procedure
can be any atomic action reading from or writing onto
the local variables of the exporting action system. In
this case, the body bd(Get) of Get reads an item from
a queue q: q ∈ l
F ifo
.
In parallel composition of action systems,
C lient k F ifo, the execution clause of the composed
system is by definition:
do pop 8 waitGet od
The construct pop 8 waitGet, where pop calls Get
(call command) and waitGet awaits such a call (await
command), is regarded as a single atomic action. Let
us here name this action popGet and define it by:
popGet b= (pop
1
;waitGet
1
;bd(Get)[a/x];
waitGet
2
; pop
2
)
where [a/x] substitutes the variable a that is used
as an actual parameter, with the formal parameter x,
and thus Get writes the head of the queue q onto
a, which passes the requested value from F ifo to
ICSOFT 2008 - International Conference on Software and Data Technologies
248

C lient. Hence, communication is based on sharing an
action in which data is atomically passed from system
to system by executing the body of a procedure.
3 SYSTEMC
SystemC (The OSCI, 2002) can be used in designing
cycle-accurate models of software algorithms, hard-
ware architectures and interfaces of SoC and system-
level designs. It is a suitable tool for hardware mod-
elling, even though it is built on a high-level, object-
oriented software programming language. Being
able to replace actual hardware description languages,
such as VHDL and Verilog, in hardware design Sys-
temC makes it possible to model entire HW/SW sys-
tems in a single description language. With SystemC
designer can use all the object-oriented features and
development tools of C++ (Stroustrup, 1997) in ad-
dition to the system architecture constructs, such as
hardware timing, concurrency and reactive behaviour,
which are not included in standard C++. Both soft-
ware and hardware partitions that are written in Sys-
temC can also be tested using the same test bench,
provided by SystemC, without any need for language
conversions between different abstraction levels. Sys-
temC models can be refined down to lower abstraction
levels ending up with an implementable design. The
refinement process may be performed part by part so
that one design may consist of system parts at several
different abstraction levels. Nevertheless, the design
remains simulatable.
A SystemC model consists of modules that break
the design into several independent components.
Modules implement data encapsulation by hiding lo-
cal data and algorithms from the environment. Mod-
ules may contain also hierarchies of other modules.
Modules’ inner functionality is produced by running
processes that are triggered by events. Processes
of different modules communicate with each other
via channels that are accessed through ports and in-
terfaces. A port communicates with its designated
channel through an interface, which introduces the
methods that the port can use to access the chan-
nel. Channels are either primitive channels or hier-
archical channels depending on their complexity. A
primitive channel does not contain any other SystemC
structures, whereas hierarchical channels may contain
other modules and channels as well as internal pro-
cesses. In practice, hierarchical channels may be as
complex structures as modules.
The SystemC scheduler acts as a system kernel
that controls the SystemC simulation. The sched-
uler handles the timing and order of the processes
=
ActionC
Language constructs
& Programming style
+
Verified, implementable
& simulatable model
Formal, behavioural model
(System specification)
Action Systems
description
SystemC
code
Figure 4: The concept of ActionC.
running in the system and updates the communica-
tion channels when needed. The scheduler catches
and manages the events that processes raise. This
way the scheduler acts as an intermediate in inter-
process communications triggering processes by re-
quest of other processes. Concurrency of actions is
modelled using the notion of delta delay. Simula-
tion time remains stopped while the scheduler man-
ages the events, process operations and channel up-
dates of the simulation time point in question. Com-
munications may be modelled in the simulation syn-
chronously or asynchronously depending on the spec-
ification.
4 ACTIONC
ActionC can be considered as the implementation of
the Action Systems formalism in the SystemC envi-
ronment but ActionC is also a design method that fol-
lows the programming style and structure of Action
Systems descriptions (Fig. 4). The objective of this
merger is to utilise the best parts of both system mod-
elling languages. Action Systems is a fine language in
system specification and verification throughout a de-
sign process but it lacks the kind of commercial tools
that would spread the use of the language beyond the
borders of the academic world and promote the ac-
ceptance of the language in the industry. On the other
hand, SystemC is a powerful tool in system model
simulation, refinement and testing but it is short of a
rigorous method that would ensure the correctness of
the model in the initial system description and also
preserve it during the refinement process. The idea
of ActionC is to combine the formal features of Ac-
tion Systems with the benefits of the SystemC envi-
ronment, thus creating a framework for writing exe-
cutable and refinable specifications that are verified
in a formal manner.
The focal point of this paper is the ActionC im-
plementation of the Action Systems type of proce-
dure based communication model. In Action Sys-
tems, communication between systems is an essen-
tial issue when modelling complex embedded sys-
tems with multiple modules and processors. The pro-
cedure based communication model of Action Sys-
RIGOROUS COMMUNICATION MODELLING AT TRANSACTION LEVEL WITH SYSTEMC
249
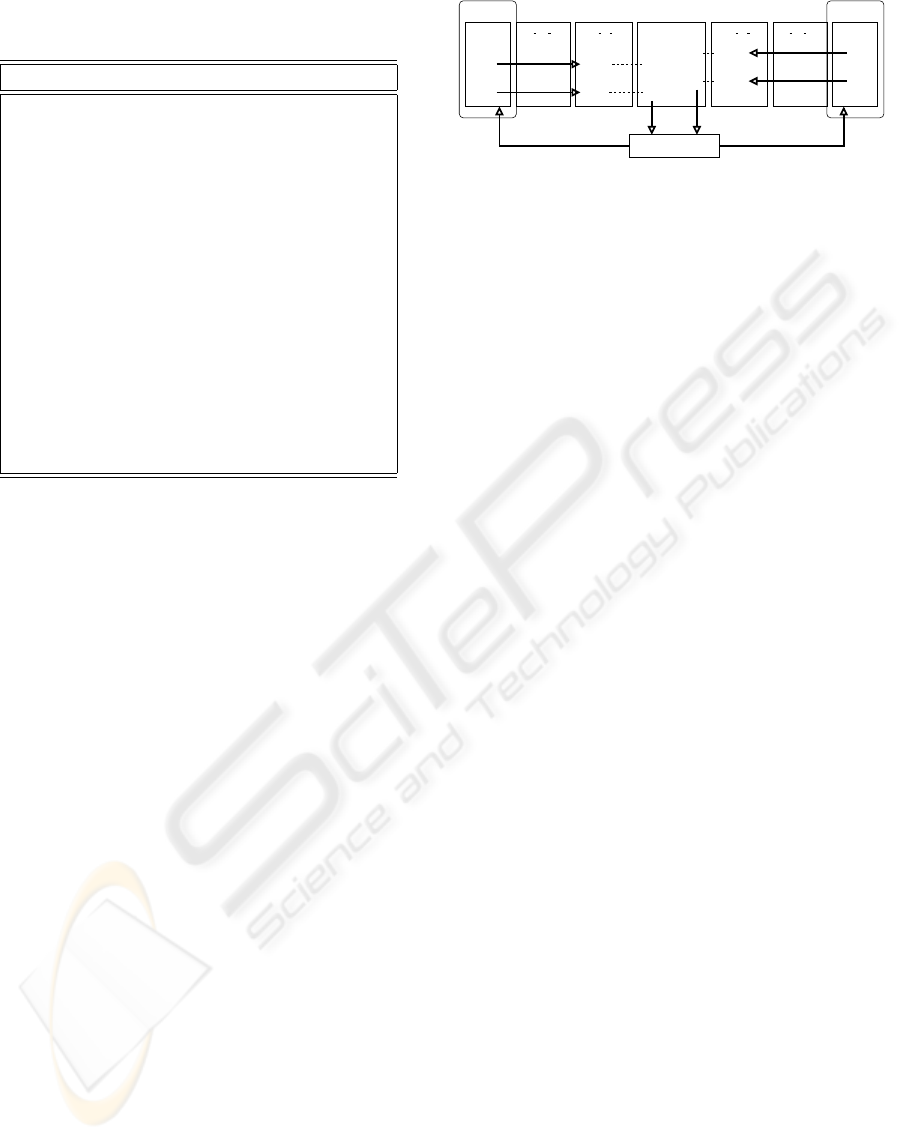
Table 1: Matching language constructs between Action
Systems and SystemC.
Action Systems SystemC
action system ⇔ Module
in variable ⇔ sc_inhi
out variable ⇔ sc_outhi
inout variable ⇔ sc_inouthi
(local) variable ⇔ private C++/
SystemC variable
private procedure ⇔ private C/
C++ void method
public procedure ⇔ SystemC hierarchical
channel
function ⇔ private C/C++
non-void method
action ⇔ Module member
execution loop ⇔ SystemC thread
process
tems corresponds to the abstraction level of transac-
tion level modelling, which is also the most usual
modelling level in SystemC design. Therefore, com-
munication modelling must be properly handled also
in the ActionC framework. Before going further into
the issues of inter-module communication, we will in-
troduce the more obvious similarities between Action
Systems and SystemC languages.
4.1 Matching SystemC and Action
Systems Elements
SystemC and Action Systems share several language
constructs as can be concluded from their short intro-
ductions in the previous sections. The directly map-
pable constructs are gathered in Table 1. Both lan-
guages use modularisation in creating local scopes:
SystemC uses modules while an action system is the
corresponding structure in the Action Systems for-
malism. In ActionC we call this structure an ActionC
module. This structure also has an interface that it
uses in the communication with the environment. The
atomic actions of Action Systems are implemented
as member functions of the ActionC module. The
member functions may be either normal C++ meth-
ods or SystemC processes. These member functions
are called ActionC actions and they are executed by
performing action calls.
The execution loop of each of the Action Sys-
tems module is also implemented as a thread pro-
cess that runs the local actions one at a time. The
thread is suspended while local actions and actions in
imp ch if channel exp ch if
readX()
get()
virtual
SystemC scheduler
event notification
trigger pro cess waitGet
6.
7. 3.
2.
exp get port
getCompleted()
writeX(x)
getCompleted()
virtual
virtual
readX()
get()
virtual
4.
5.
F ifo
waitGet
call
call
writeX(x)
trigger pro cess pop
event notification
imp
get port
8.
1.
Client
pop
call
call
Figure 5: FIFO and its client communicating through a pub-
lic procedure.
other modules are executed. When inter-module com-
munication in Action Systems uses only basic data
types, the SystemC primitive channel ports
sc_in<>
,
sc_out<>
and
sc_inout<>
match directly with the
in, out and inout variables of the Action Systems for-
malism. When the channel structure is more complex,
a SystemC hierarchical channel is a more practical so-
lution. For example, the procedure based communi-
cation model of Action Systems can be implemented
in ActionC using the SystemC hierarchical channel.
This implementation will be elaborated in Sect. 4.2.
4.2 Procedure based Communication
The possibility to hide detailed communication prim-
itives at high abstraction levels allows a designer to
concentrate on the functionality of the system un-
der design. In Action Systems, as introduced in
Sect. 2.2, the implementation of communication ac-
tivities is hidden into a procedure based communica-
tion model. In the ActionC framework the procedure
based communication is modelled by using a combi-
nation of SystemC’s hierarchical channels, ports and
interfaces at the transaction level of abstraction. With
the combination of these artefacts we are able to con-
fine the functionality of communication procedures
and to have one channel per communication proce-
dure. Ports and interfaces are used to connect a hier-
archical channel to a system that exports it and to sys-
tems that call it, that is, in both ends of a hierarchical
channel we have a port-interface couple. The func-
tionality of an interface depends on its type: exported
or imported communication channel. At the imported
side the interface has a minimum amount of methods
because the properties of the imported channel is in-
troduced by a system that exports it. At the exported
side the system has a wide-ranging set of methods to
use the channel. Communication channels are intro-
duced in and exported by a callee and imported by
a caller, as in Action Systems. The implementation
follows the blocking wait practice in which the call-
ing action waits until the callee is ready to form the
communication channel between the two modules.
ICSOFT 2008 - International Conference on Software and Data Technologies
250

The operation of the ActionC procedure based
communication channel, in terms of the Action Sys-
tems communication procedure call, is illustrated in
Fig. 5, which returns us to consider the FIFO struc-
ture we used as an action system example in Sect. 2.
Again, action system C lient needs to extract data
from the F i fo using the public procedure Get ex-
ported by F ifo and imported by C lient. In general
the data integrity during a communication call, as re-
quired by the Action Systems model, is ensured in
the ActionC model by seven (7) or eight (8) commu-
nication phases. The number of the phases is deter-
mined by the existence of a return value. In this case
the phases are: (1) The Action system C lient begins
the communication procedure by calling the chan-
nel’s interface method as it would call the imported
procedure in the Action Systems model. Then the
method stores its parameters into the channel’s local
variables before (2) sending an event notification to
the SystemC scheduler, which (3) triggers the process
waitGet. The process waitGet is sensitive to the par-
ticular event. The concept of sensitivity in SystemC
corresponds to the function of the await command in
the Action Systems model. After being invoked (4)
the process waitGet calls the writeX() method pro-
vided by its interface to write the first element of the
queue into the channel’s local variables. After the
writeX() method has returned (5) process waitGet em-
ploys the channel interface method getCompleted(),
which (6) sends an event notification to the SystemC
scheduler. (7) As a result from the notification, the
SystemC scheduler informs process pop of the com-
pletion of the communication procedure, that is, con-
tinues its execution from the point of last suspension.
(8) By calling the interface method readX() process
pop collects the value written to the channel by wait-
Get, thus finalising the communication procedure.
This implementation follows the atomicity con-
cept of the procedure based communication model in
Action Systems. The SystemC scheduler ensures that
the entire procedure call from phase (1) to phase (8)
is a continuous operation that is advanced and com-
pleted without interruptions.
5 CONCLUSIONS
We have taken the initial steps in creating a for-
mal framework for modelling and verifying embed-
ded computer systems with the SystemC environ-
ment. Using the presented ActionC framework de-
signer is able to reliably simulate Action Systems de-
scriptions. At the present phase of development Ac-
tionC still is more of a coding style than a fully im-
plemented class library to be used with SystemC. In
this paper we elaborated the ActionC implementation
of the procedure based communication model used by
the Action Systems formalism. The resulting model is
a transaction level model of a communication method
that uses remote function calls and blocking wait.
REFERENCES
Back, R.-J. (1988). A Calculus of Refinements for Program
Derivations. Acta Informatica, 25:593–624.
Back, R.-J. and Kurki-Suonio, R. (1983). Decentralization
of Process Nets with Centralized Control. In PODC
’83: Proc. of the second annual ACM symposium on
Principles of Distributed Computing, pages 131–142.
ACM.
Back, R.-J. and von Wright, J. (1998). Refinement Calculus:
A Systematic Introduction. Springer-Verlag.
Degerlund, F., Walden, M., and Sere, K. (2007). Implemen-
tation Issues Concerning the Action Systems Formal-
ism. In PDCAT ’07: Proc. of the 8. Int. Conference
on Parallel and Distributed Computing, Applications
and Technologies, pages 471–479. IEEE.
Dijkstra, E. W. (1976). A Discipline of Programming.
Prentice-Hall, Inc.
Habibi, A. and Tahar, S. (2005). Design for Verification of
SystemC Transaction Level Models. In Proceedings
of the conference on Design, Automation and Test in
Europe, pages 560–565. IEEE.
Patel, H., Shukla, S., Mednick, E., and Nikhil, R. (2006). A
Rule-Based Model of Computation for SystemC: Inte-
grating SystemC and Bluespec for Co-Design. In For-
mal Methods and Models for Co-Design, 2006. MEM-
OCODE ’06. Proc. 4. ACM and IEEE International
Conference on, pages 39–48. IEEE.
Sere, K. and Back, R.-J. (1994). From Action Systems to
Modular Systems. In FME’94: Industrial Benefit of
Formal Methods, pages 1–25. Springer-Verlag.
Stroustrup, B. (1997). The C++ Programming Language.
Addison-Wesley, USA, 3. edition.
The OSCI (2002). SystemC Version 2.0 User’s Guide. Up-
date for SystemC 2.0.1.
The OSCI (2005). IEEE Std 1666-2005, SystemC Language
Reference Manual. IEEE.
Vardi, M. Y. (2007). Formal Techniques for SystemC Veri-
fication. In Proceedings of the 44th annual conference
on Design automation, pages 188–192. ACM.
RIGOROUS COMMUNICATION MODELLING AT TRANSACTION LEVEL WITH SYSTEMC
251
