
LOW AREA SCALABLE MONTGOMERY INVERSION
OVER GF(2
m
)
Mohamed N. Hassan and Mohammed Benaissa
Electronic and Electrical Department, University of Sheffield, Mappin Street, Sheffield, U.K.
Keywords: Cryptography, Finite Fields, ECC over GF(2
m
), Montgomery Inversion, FPGA.
Abstract: In this work, an improved algorithm for Montgomery modular inversion over GF(2
m
) is proposed.
Moreover, A novel scalable hardware architecture for the proposed algorithm is presented which is
parameterizable and amenable to interfacing to special purpose processors such as microcontrollers. The
architecture supports operations over finite fields GF(2
m
) up to m 571
≤
without the need to reconfigure
the hardware. The results show that, this work can be exploited to construct low resource elliptic curve
cryptosystems (ECC).
1 INTRODUCTION
Since their introduction by Miller and independently
Koblitz in 1985 (D. Hankerson, 2004), Elliptic curve
cryptosystems are considered the best compromise
between the required security and the attainable
performance for many low resource constrained
security systems. Scalability versus performance, in
particular for low resources applications, has always
been a challenging trade-off in ECC hardware
implementations. The efficiency of of this trade-off
depends significantly on the efficient
implementation and scalability of the modular
arithmetic of the underlying field. The computation
of the modular inversion is the most challenging
from this perspective. Hence, the contribution of the
work presented in this paper.
In the literature, several algorithms for
computing the multiplicative inverse in GF(2
m
) have
been proposed (D. Hankerson, 2004). Some of them
are based on performing modular multiplication like
Fermat’s little theorem. In contrast, others apply the
greatest common divisor algorithm GCD which has
many variants. All these variants can compute the
modular inverse in about 2m iterations. However,
the Montgomery inversion algorithm (B. Kaliski,
1995) offers better performance and can perform the
inversion in less than 2m iterations. Consequently,
this work investigates Montgomery modular
inversion and develops algorithmic modifications
that reduce the hardware complexity whilst offering
scalable and parameterized inversion with low area
architecture over FPGAs.
A modified algorithm for Montgomery is
therefore proposed and implemented on the smallest
and lowest cost Xilinx FPGA. The architecture is
parameterized to support variable word lengths and
has been implemented with 8, 16, 32 and 64 bit
word lengths for finite field lengths m=163 and
m=571. The results obtained show that the 32-bit
data path designs are the best compromise between
the low area requirements and the practical
performance in terms of throughput (4.63 Mbps for
m = 163).
This paper is organized as follows: section 2
presents a theoretical background about ECC over
GF(2
m
). Section 3 gives an overview about the
Montgomery modular inversion. The proposed
improved algorithm is presented in section 4. The
description of the circuit operation and the FPGA
implementation are in Section 5. Finally, Section 6
shows the performance and results of the
implementation on a state of the art FPGA.
2 ELLIPTIC CURVE ITHMETIC
OVER GF(2
m
)
Briefly, a cryptosystem based on an elliptic curve E
over finite fields GF(2
m
) is mainly used for
encipherment of point P by key K such that, Q=K.P.
23
YXYXaXb
+
=++
(1)
363
N. Hassan M. and Benaissa M. (2008).
LOW AREA SCALABLE MONTGOMERY INVERSION OVER GF(2m).
In Proceedings of the International Conference on Security and Cryptography, pages 363-367
DOI: 10.5220/0001923503630367
Copyright
c
SciTePress

This operation is called scalar multiplication
(N.Koblitz, 1984). Practically, P is a point lies on the
curve E or equally the data to be encrypted.
Multiplying K by P can be achieved by many
methods e.g. double and add or shift and add, etc.
Actually, this operation dominates the execution
time. Both Q and P must satisfy the equation that
represents the elliptic curve E over GF(2
m
), namely,
Where
m
a,b GF(2 )∈
. Equation (1) is called the
simplified Weierstarss equation over the finite field
GF(2
m
) with characteristic
2=
in the affine
(Euclidean) coordinates .
For two points
1
P and
2
P
m
GF(2 )∈ .
1.
Point addition
(
)
12 33
P P (x ,y )+= :
Let
111
P (x,y)= ,
222
P (x,y)=
and
(
)
12 33
PP (x,y)+=
Where
12
PP≠±
and
(
)
m
12 1 2
P,P , P P GF(2 )+∈ . Then,
2.
Point doubling
2P
:
Let
111
P (x,y)=
m
GF(2 )∈
,
11
PP≠−
and
133
2P (x , y )= .
Thus, we can observe from equations (2,3) that one
inversion is involved in both point addition and
point doubling over the elliptic curve E.
Where
21
12
21
1
112
1
yy
PP
xx
y
xpp
x
λ
⎧
+
⎛⎞
≠
⎪
⎜⎟
+
⎪
⎝⎠
=
⎨
⎪
+=
⎪
⎩
…
3 MONTGOMERY INVERSION
AND ITS VARIANT
Based on the extended binary algorithm and
Montgomery trick for computing the modular
multiplication (L. Montgomery, 1985). B.Kaliski
was the first to propose the Montgomery inverse
algorithm for a given irreducible polynomial p(x)
and for any element a(x)∈ GF(p) or GF(2
m
).
Montgomery inversion for element a(x) is defined
as,
1m
MonInv(a(x)) a .2 mod p(x)
−
=
B.Kaliski proposed two phases to compute the
inverse of a(x). The first phase is dedicated to
compute the GCD of both a(x) and p(x) and
concurrently, calculates the number of halvings L.
This phase produces the partial Montgomery
inverse.
1L
Par.MonInv(a(x)) a .2 mod p(x)
−
=
.
The number L is in the range
mL2m≤≤ .
Then, the second phase performs L-m right shifting
on the partial Montgomery inverse to produce the
final inverse in the Montgomery domain. The
number of iterations can be adjusted to right shifts or
left shifts of the output from the first phase to get the
inverse in the required domain (Montgomery or
residue). The Montgomery inversion Algorithm uses
4 vectors to hold the intermediate calculations
between the successive iterations. Although the
B.Kaliski Algorithm is simple, it has no fixed
number of iterations which makes it difficult to be
mapped into hardware efficiently. M.Shieh, J.Chen,
and C.Ming (M.Shieh, 2006) developed a new
modification to the Kaliski’s algorithm, as shown in
algorithm 1, in which only one phase is required.
Consequently, by this improvement the data
dependency between the first phase and the second
phase has been eliminated. Moreover, this also
avoided the zero comparison operation required by
the original algorithm.
Algorithm 1.
Input : (). ,()
m
ax x px
Output:
1
().2.mod()
−
m
ax px
Initialize :
u p, v a, r 0, s 1, L 0
←
←←← ←
For 0 : 2
{If (u is even) then
u u/2, s 2s.mod p(x),
else if (v is even) then
v v/2 , r 2r mod p(x),
else if (u > v) then
u (u v)/2, r r+s, s 2s mod p(x
Lm→
←←
←←
←⊕ ← ← )
else u (u v)/2, s r + s, r 2r mod p(x)←⊕ ← ←
L L + l }
return r;
←
4 MODIFIED MONTGOMERY
MODULAR INVERSE
ALGORITHM
In this section, based on algorithm 1, an
improvement for the Montgomery inversion
algorithm over GF(2
m
) is represented. Kim and
Hong (C.H.Kim, 2003) introduced a development
based on a modified version of the binary extended
great common divisor algorithm BGCD. Their
algorithm is suitable for realizing a compact and fast
inverters over GF(2
m
). Simply, they replaced the
degree comparison employed by the BGCD with a
counter and state indicator bit. By applying the same
idea to Algorithm 1 we can define a new modified
version of the Montgomery inversion algorithm,
2
312
xxxa
λλ
=++++&
(
)
31331
yxxxy
λ
=
+++
(2)
2
2
31
1
b
xx
x
=+
&
2
31 33
yx xx
λ
=+ +
(3)
SECRYPT 2008 - International Conference on Security and Cryptography
364

Algorithm 2 below, which will save m XORs used
to perform the degree comparison. Besides, these m
XORs lie on the critical path of the data path. Hence,
we can have great savings not only in terms of area
but also in terms of reducing the delays caused by
degree comparison in algorithm 1.
The algorithm 2 proceeds as follows:
At the beginning, the counter, the state bit, the
vectors u, v, s and r are initialized. Thus, we have u
> v at the beginning. This means that degree of u has
to be decremented according to the BGCD
algorithm. Further, at the start of the algorithm the
value of u
0
always equals to 1.
Algorithm 2.
Input : (). ,()
m
ax x px
Output :
1
().2.mod (),
m
rax px
−
=
Initialize :
up,va,r0,s1,L0
State 0,Count 0
←←←←←
←←
For 1 : 2
{ If (sta te= 0 ) th e n
if (u is even ) th en
{ u u/2, s 2s.m od p(x)
if (c o u n t = 0 ) th e n
c o u n t= co u n t + 1 ; s ta te = 1
e n d if
Lm←
←←
}
else if (v is even) then
{ v v/2, r 2r.m od p(x) , count=count +1}
e ls e
{ u (u v)/2, r r+ s, s 2 s m o d p (x ),
count=count -1
if (count = 0 )then
c o u n t= co u n t + 1 ; s t
←←
←⊕ ← ←
ate = 1
e n d if } }
else if (state= 1 ) th en
if (u is even ) th en
{ u u/2, s 2s.m od p(x),count=count +1}
else if (v is even) then
{ v v/2, r 2r.m od p(x),count=coun
←←
←← t - 1
if (count = 0) then
count=count +1 ; state = 0
e n d if }
e ls e
{ v (u v)/2, s r+s, r 2r m od p(x),
count=count -1
if (count = 0 )then
c o u n t=
←⊕←←
count +1 ; state = 0
en d if } }
}
retu rn r ;
We have two possible conditions for the vector
v. If v
0
=1, hence, in the second iteration the counter
will be incremented by one and the state bit will
equal one. The procedure for decreasing the degree
of u is performed by XORring u and v, dividing the
value by 2 and saving the result in u. In parallel,
vector s is XORed with r and vector
s is doubled.
The results of the two operations will be stored in r
and s respectively. The other possible condition is
v
0
=0. Thus, the vector v is even. Hence, the counter
will increment by one but the state bit will remain
zero. Next, the vector v will be divided by two and
the vector r will be doubled. Accordingly, the value
of the state bit =0 and the counter >0. For the state
bit = 1, If u
0
= 1 and v
0
=1. This means that the
degree of v
>u. Hence, the degree of v has to be
reduced. Thus, the vector v is XORed with u and the
result will be stored back in v. In parallel, vector r is
XORed with s and vector
r is doubled; the results of
the two operations will be stored in s and r
respectively and the counter value will be
decremented by one. If the value of the counter
becomes zero the state bit will be equal to zero
otherwise will remain one. The algorithm keeps
track as the procedures in algorithm 2 until 2m
iterations. After 2m iterations, the value of the
vectors u converges to one. Meanwhile, the values
of the vectors v and s converge to zero. Finally, the
inverse of the vector a(x) represented in the
Montgomery domain will be the value in the vector r
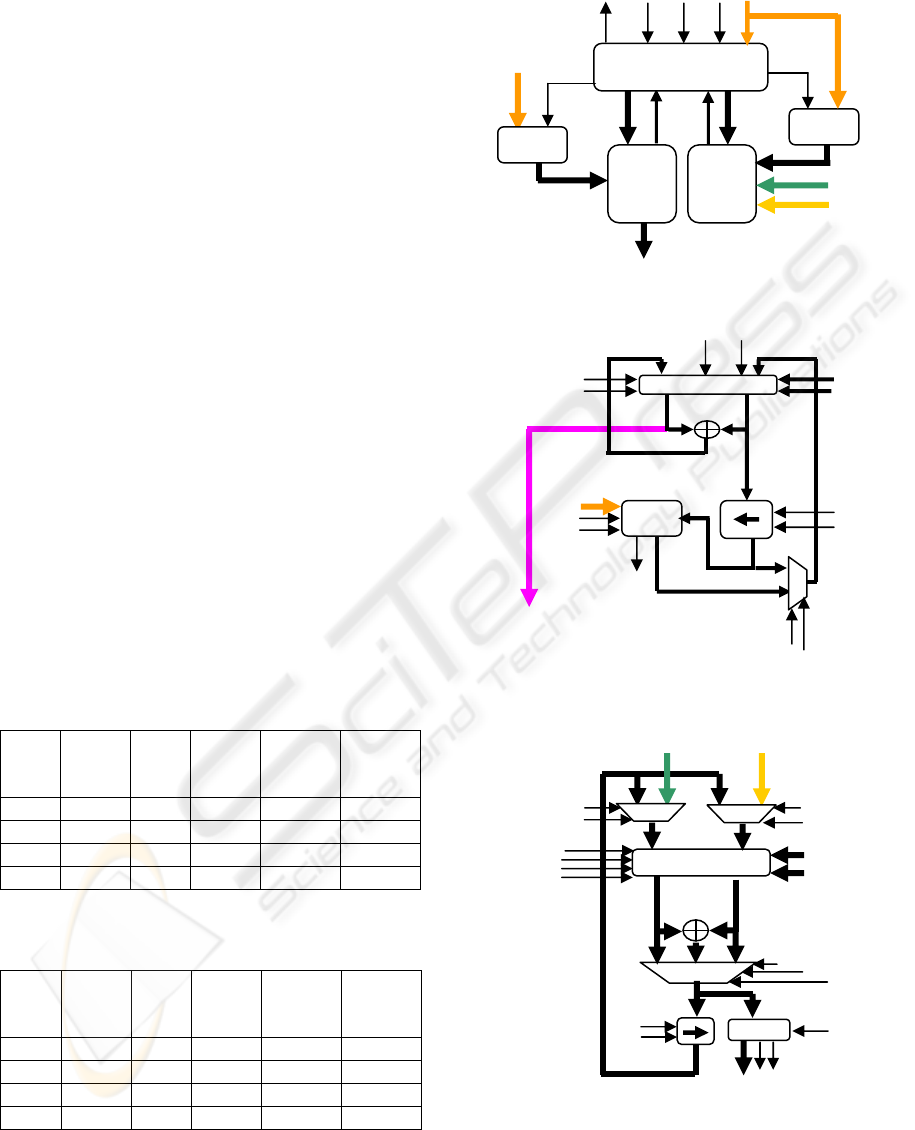
5 CIRCUIT DESIGN
Figure 1 depicts the new architecture for the
Montgomery inverter. The data path consists of two
blocks, namely, u-v block and s-r block. The first is
to compute the intermediate values for vectors u and
v and the second to compute in parallel the
intermediate values for vectors s and r. A control
block is designed for, interfacing the dual block
RAMs (DBRAM), decisions required by the
algorithm and the operations necessary for
computing the inverse (shifting operation, reduction,
checking the even-non even condition. etc).
As shown in figure 2 and figure 3, both u-v and
s-r blocks have a (DBRAM) that acts to hold the
vectors u, v, s, and r. The (DBRAM) in each block is
addressed by a counter controlled by the control
block. Counters are scalable and they accommodate
addressing the (DBRAM) up to
2*(
(m-m.modWord-Length)/Word- Length+1) memory
depth, where
m is the length of the vector a(x). Both
u-v and s-r blocks have two shifting units. In the u-v
block, the shifting unit is right shifting. Meanwhile,
in the s-r block, the unit is left shifting. Both units
load the word to be shifted, storing the most
significant digit MSD for the left shift unit or the
least significant digit LSD for the right shift unit to
be added to the next word, shif left or right by the
corresponding number of shift counts, and then write
the shifted word to the (DBRAM) port. The
Reduction unit is designed to be parameterized and
scalable to accommodate finite fields up to
m 571
≤
in addition to different data path widths. NIST
recommended reduction polynomials (NIST, 2000)
LOW AREA SCALABLE MONTGOMERY INVERSION OVER GF(2m)
365
are used to implement the reduction unit as they are
designed to provide both security and high
performance.
6 CONCLUSIONS AND RESULTS
The proposed modified algorithm for Montgomery
inversion has been fully modelled in VHDL and
implemented on the smallest and lowest cost chip
available from Xilinx Spartan III family (XC3S50).
The proposed architecture is parameterized in order
to support variable word lengths. A scalable
architecture has been implemented with 8, 16, 32
and 64 bit word lengths. Table 1-2 shows the
implementation results for the different widths after
place and rout for finite field lengths m=163 and
m=571. As expected, the control block and counters
dominate the critical path of the design. Thus, the
increment of the operand size has a lesser effect on
the working frequency. The results show that the 32-
bit data path designs are the best compromise
between the low area requirements and the practical
performance in terms of throughput (4.63 Mbps for
m = 163). Further, the proposed architecture with
low hardware resources is expected to yield
correspondingly lower power budgets and therefore
would be suited for low resource ECC
implementations.
Table 1: FPGA Implementation Results for Different Data
Path Widths on Spartan III XC3S50 assuming
m =163.
Table 2: FPGA Implementation Results for Different Data
Path Widths on Spartan III XC3S50 assuming
m =571.
Figure 1: Montgomery inverse basic building block.
Figure 2: Montgomery inverse s-r block.
Figure 3: Montgomery inverse u-v block.
Data-
path
width
Look-up
tables
Area
(slice)
Freq.
(MHz)
Throughput
(Mbps)
Throughput
/area
kbit/s.Slices
8 596 319 96 0.87 2.73
16 796 439 94.417 1.63 3.72
32 1005 583 85.096 2.7 4.63
64 1247 697 82.066 5.2 7.5
Data-
path
width
Look-up
tables
Area
(slice)
Freq.
(MHz)
Throughput
(Mbps)
Throughput
/area
kbit/s.Slices
8 596 319 96 0.256 0.8
16 796 439 94.417 0.53 1.2
32 1005 583 85.096 0.9 1.55
64 1247 697 82.066 1.74 2.5
a(x)
p(x)
even
Sel-u
Load
Load
Sel-v
En port-u
WE port v
En port-v
WE port u
D-BRAM
Address u
Address v
v
u
u XOR v
Shift right
Shift count
Compare
even
Even
Not even
Shift count
Start
Address
Field
a
-1
(x).2
m
Address
Down
Counter
p(x)
a(x)
Up Counter
u-v
Block
s-r
Block
Control Block
Inverse ready
Field
Sel-v
D-BRAM
WE port
s
WE port r
Address s
Address r
En port-r
En port-s
Field
a
-1
(
x
)
.2
m
Start
reduction
Shift
Reduce
Shift left
Shift count
RD
WR
Reduction
Unit
SECRYPT 2008 - International Conference on Security and Cryptography
366

REFERENCES
D. Hankerson, A. Menezes, and S. Vanstone.” Guide to
Elliptic Curve Cryptography
.” Springer-Verlag, 2004.
N. Koblitz, “
Introduction to Elliptic Curves and Modular
Form
s” Graduate Texts in Mathematics, Vol. 97,
Springer, 1984.
P. L. Montgomery. “
Modular Multiplication without Trial
Division
” Mathematics of Computation, vol.44. April
1985.
B. Kaliski.”
The Montgomery inverse and its applications”.
IEEE Transactions on Computers, Vol. 44, No.8,
August 1995.
NIST “
Recommended elliptic curves for federal
government tuse
”, Available at http://
csrc.nist.gov/encryption/.2000.
M. Shieh. J.Chen, And C.Ming “
High-Speed Design of
Montgomery Inverse Algorithm over GF(2
m
)” IEICE
Trans. Fundamentals, Vol.E89–A, February 2006.
C. H. Kim, S. Kwon, J.J. Kim, C.P. Hong, “
A Compact
and Fast Division Architecture for a Finite Field
GF(2
m
)”. ICCSA 2003, LNCS 2667, pp. 855-864,
2003.
LOW AREA SCALABLE MONTGOMERY INVERSION OVER GF(2m)
367
