PROPER KEY GENERATION FOR THE IZOSIGN ALGORITHM
Lor´and Sz¨oll¨osi, G´abor Feh´er and Tam´as Marosits
High Speed Networks Laboratory, Department of Telecommunications and Media Informatics
Budapest University of Technology and Economics, Magyar Tud´osok krt. 2., Budapest, Hungary
Keywords:
Graph-based digital signature algorithms, graph isomorphism.
Abstract:
In the last decade using digital signatures in authentication and authorization protocols just as in e-business
scenarios became more and more important and indispensable. New algorithms with different features for
various applications are presented continuously. The IzoSign digital signature creation algorithm was intro-
duced by the authors of this paper at CANS 2007. At that time, random key generation was proposed, which
was later found vulnerable with high probability to a vertex matching attack (Kutylowski, 2007). We hereby
analyze and generalize this kind of attacks, build a key generation algorithm that withstands such attacks, and
then give a (theoretic) construction for key generation which (under the P 6= NP or NP = EXP assumptions)
is hard to break.
1 INTRODUCTION
Digital signature algorithms provide authentication
of messages using mathematical methods. Signa-
ture algorithms are based on a hard problem class
for which the solution can only be generated by the
signer (via additional information from the key gen-
eration phase), and message hashes select a problem
from this class to be solved. If a message hash is
seen with the corresponding solution, it can be as-
sumed that the person holding the additional infor-
mation from the key generation phase (called private
key) intended to sign the document. Most countries
define the legal consequence of digital signatures the
same as that of handwritten signatures (European Par-
liament and Council, 1999).
One possible hard problem was discrete loga-
rithm and factoring; RSA (Rivest et al., 1977) and
DSA (Schneier, 1993) are the most popular algo-
rithms based on this problem class. Discrete loga-
rithm is considered hard, but it is not reduced to an-
other hard class of problems such as EXP (Aaron-
son, 2008), DistNP (Aaronson, 2008; Venkatesan and
Levin, 1988) or NP (Aaronson, 2008; Cormen et al.,
1990). These algorithms are calculation intensive,
usually requiring dedicated coprocessor in embedded
systems. They provide medium signature length of
1024-2048 bits. Other algorithms either try to op-
timize signature length (like CFS (Courtois et al.,
2001)) or signature creation time (like the broken
SFLASH (Courtois et al., 2003; Dubois et al., 2006)).
Our proposed algorithm, IzoSign, is based on sub-
graph isomorphism (Cormen et al., 1990). The hard
problem is to find a subgraph in a large graph which
is isomorph with an other given graph. It is a one-
time signature (Schneier, 1993) protocol, that is ex-
tended to digital signatures using a modified version
of the Merkle scheme (Merkle, 1989). Subgraph iso-
morphism is NP hard (NP complete for the decision
problem) (Cormen et al., 1990), and its simple cases
are are well researched (Gupta and Nishimura, 1996b;
Babai et al., 1982; Miller, 1980; Luks, 1980; Filotti
and Mayer, 1980), since this problem appears in the
field of both model transformation and pattern recog-
nition.
Throughout, we use the usual notation for asymp-
totic relations, see (Cormen et al., 1990) for example.
This notation is summarized in Table 1.
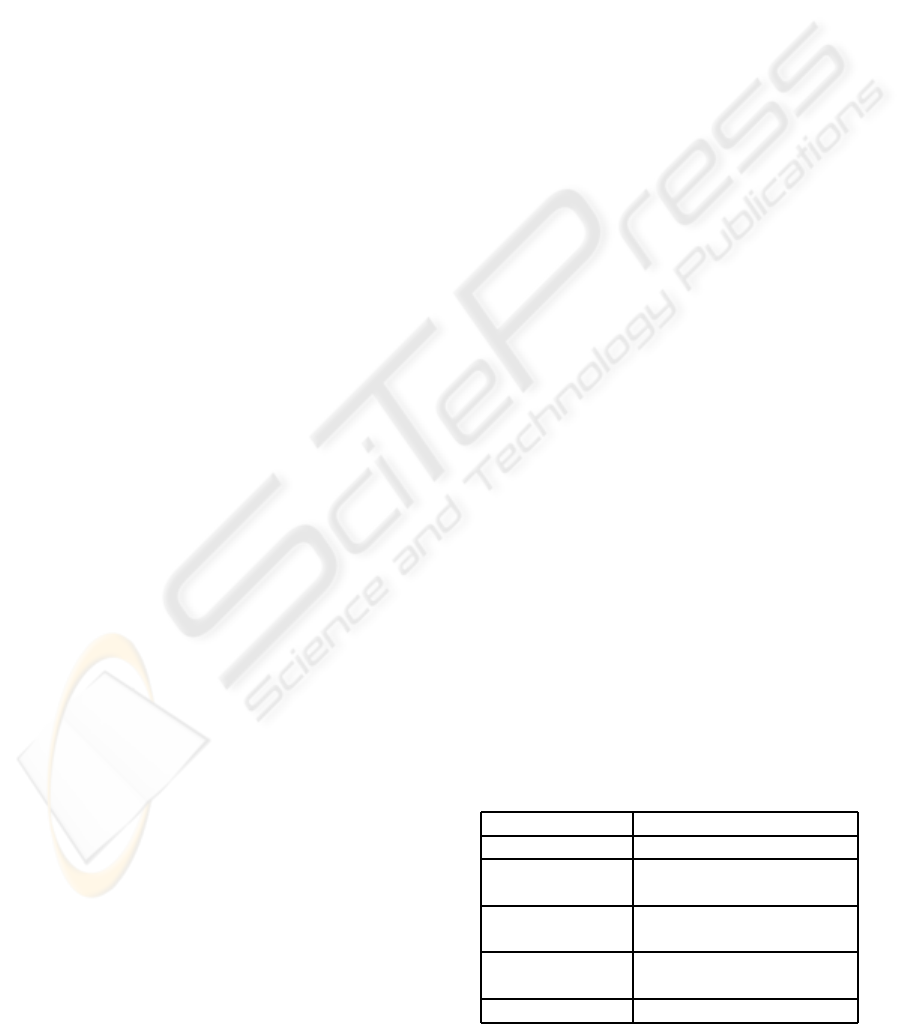
Table 1: Explanation of asymptotic notations (summarized
from (Cormen et al., 1990)).
Notation Description
f(n) = o(g(n)) f is dominated by g
f(n) = O (g(n)) f is asymptotically
upper bounded by g
f(n) = θ(g(n)) both f(n) = O (g(n)) and
f(n) = Ω(g(n)) holds
f(n) = Ω(g(n)) f is asymptotically
lower bounded by g
f(n) = ω(g(n)) f dominates g
368
Szöllösi L., Fehér G. and Marosits T. (2008).
PROPER KEY GENERATION FOR THE IZOSIGN ALGORITHM.
In Proceedings of the International Conference on Security and Cryptography, pages 368-372
DOI: 10.5220/0001924403680372
Copyright
c
SciTePress

In Section 2 we give a short description about the
IzoSign algorithm, in Section 3 we give a proof that
even random key generation with large enough key
graphs and constant signature length can be made se-
cure under some assumptions. Finally in Section 6 we
conclude our work.
2 THE IZOSIGN ALGORITHM
The IzoSign algorithm (described in (Sz˝oll˝osi et al.,
2007) is based on subgraph isomorphism. The main
algorithm is a one-time signature creation method,
which is then extended to a digital signature system
using a modified version of Merkle trees (Merkle,
1989). The public key consists of two graphs, a nee-
dle (G) and a (larger) haystack (H), and the private
key is a function V(G) → V(H) which reveals a sub-
graph of H that is isomorphic to G. The hardness of
this protocol relies on the strength of the key graph;
this can be checked during key generation. The solv-
ing time of random generated hard graphs as a func-
tion of problem size was simulated and studied by
Shuichi Ichikawa and Shoji Yamamoto (Ichikawa and
Yamamoto, 2002); their results show the expected ex-
ponential growth, and regression predicts that 81 ver-
tices take 100000 years on a software-based solution,
while 264 vertices provide the same defense against
key-specific custom hardware attacks.
Simple cases for key generation found in the liter-
ature are (n is the number of vertices in the graph):
• k-connected partial k-trees: having an algorithm
in the order of O (n
k+2
) (that is, polynomial in n
but exponential in k) (Dessmark et al., 1996);
• partial k-trees of bounded degree: also having
an algorithm in the order of O (n
k
) (Gupta and
Nishimura, 1996b). If k ∼ n, this limit becomes
exponential; otherwise the k-tree would have a
linear number of edges, which is impossible us-
ing our graph generation.
• trees: a subproblem of the above two cases, which
is easy to match; this is avoided since we generate
graphs with quadratic edge count;
• k-connected partial k-paths: (Dessmark et al.,
1996; Gupta and Nishimura, 1996a), a subprob-
lem of k-connected partial k-trees with very low
edge count;
• two-connected outerplanar graphs: these graphs
can be matched in cubic time (Lingas, 1989), but
any planarity could be detected and thus avoided
using a linear-time algorithm (Hopcroft and Tar-
jan, 1974). Planar graphs have a linear edge count
and thus can be avoided without any further tests.
• two-connected series-parallel graphs: (Lingas and
Syslo, 1988), a subproblem of outerplanar graphs;
• strongly regular graphs: are easy for isomor-
phism (Babai, 1995; Spielman, 1996), albeit not
yet shown to be polynomial for subgraph iso-
morphism; the criteria of strong regularity can be
checked during graph generation.
2.1 Signature Generation
Signature generation consumes a key for each mes-
sage as this is a one-time signature algorithm. It re-
quires a secure hash algorithm (denoted as h(.)) that
maps messages to an integer between 0 and
n
k
− 1,
where k ≤
n
k
specifies the required security level.
Larger k means higher level but longer signatures.
1. Calculate h(m) for the message m.
2. Interpret this number as one of the possible
choices of k among the n vertices of G. This is
a one-to-one mapping between hash values and k-
vertex subgraphs of G. The chosen vertices will
be denoted as v
i
, 0 < i ≤ k, the set of these ver-
tices is denoted as S.
3. Present the maps of these vertices in H. This step
takes k memory lookups, and produces a subgraph
of H that is isomorphic to the selected subgraph of
G.
The verification algorithm then simply compared
whether the isomorphism holds; this is a simple bit
matrix comparison as the vertices are revealed in the
same order in G and H.
The first proposal for IzoSign algorithm simply re-
quired a random unidegree graph as G, and a random
extension to H. While the first is currently thought
of being secure, the latter was broken by professor
Miroslaw Kutylowski (Kutylowski, 2007). The break
used a signature to forge other ones using the same
key. It is based on the observation that a randomly
chosen vertex c of G that is not adjacent to a given
vertex v
i
of the signature cannot be mapped to a ver-
tex in H that is adjacent to the map of v
i
in H, be-
cause of the isomorphism. In random graphs, when
4|S| = 2|G| = |H|, the probability of this event is
1
4
.
By inspecting all the possible v
i
vertices of the signa-
ture, there’s a high probability that one will find the
above condition to hold for one of them for each can-
didate map of c, except the actual map. Therefore,
by recursion it is possible (with high probability) to
break a random graph given a signature. We will gen-
eralize the break shown above in Section 2.2.
PROPER KEY GENERATION FOR THE IZOSIGN ALGORITHM
369

2.2 Defense Against Limited Horizon
Algorithms
The algorithm used to break the original, random key
graph generation considered the set of vertices that are
non-adjacent to a given vertex. One can generalize
this scheme to consider the subset of vertices that are
not accessible from a given vertex in exactly z steps.
We will call these limited horizon algorithms, as they
only “look into” the graph at a given depth. Direct im-
plementation of these algorithms require ∼ n
z
steps in
dense graphs where n is the size of the graph. By tak-
ing the limit z → ∞ we arrive at the general subgraph
isomorphism, which is NP-hard.
To avoid this type of attack we propose to extend
the graph in a well-defined manner instead of the orig-
inal random extension. For the original break, this
would be to have an additional vertex v
′
i
in H for each
vertex v
i
in G that is connected to the same vertices
as v
i
, except for one vertex. This way, the break can
only eliminate a candidate map if the non-adjacency
condition holds for this vertex, but not for the map
candidate, which has a probability of
1
4
. Therefore
only one quarter of the candidates can be eliminated
for each vertex on average, so the attack remains ex-
ponential.
For the general case of limited horizon algorithms,
we mainly use the same concept, but add additional z
vertices v
i, z
to H for each vertex v
i
in G (plus the copy
of v
i
). The first vertex v
i, 1
is added the same way as
written above, but the extra vertex it needs to be con-
nected to will be v
i, 2
. This new vertex will have the
same connections as the vertex that is not connected
to v
i, 1
, but is a neighbor of v
i
(i.e., it will “simulate”
the missing connection of v
i, 2
), and so on with the
other vertices up to v
i, z
. Due to this construction, it is
impossible to distinguish v
i
from v
i, 1
using any algo-
rithm that considers the z-step limited horizon of v
i
.
This extension results in a linear increase of key size
in z, whereas the attack is exponential in z.
3 THEORETICALLY SECURE
EXTENSIONS UNDER P 6= NP
AND NP = EXP
While in the previous section we have shown that the
key generation of our algorithm can be made secure
concerning a certain class of attacks, we are interested
in defending it against any possible attack. We will
hereby give a proof that even random key generation
with large enough key graphs and constant signature
length can be made secure if P 6= NP. We will also
prove that, if the signature size is a O (
n
lgn·ω(1)
) func-
tion of the key size n, and NP = EXP, then the al-
gorithm is secure. The latter is a strong assumption,
but no algorithm is known to disprove it. This second
proof basically relies on the assumption that any al-
gorithm capable of solving NP-hard problems is ex-
ponential. This is not the same as P 6= NP, since a
runtime that is neither exponential nor polynomial is
theoretically plausible, albeit improbable.
4 EXTENSION UNDER P 6= NP
ASSUMPTION
We first give a proof for the case if the assumption
P 6= NP is made and the signature size being a con-
stant. An attack against the key generation of IzoSign
is equivalent to an algorithm solving the informed ver-
sion of the subgraph isomorphism problem. The addi-
tional input of the algorithm is k vertices in the pattern
graph G and their maps in the search graph H. With-
out this information, subgraph isomorphism is NP-
hard. Let n denote the number of vertices in G, k the
vertexcount of the signature (that is, the number of re-
vealed vertices), and let
|H|
|G|
be fixed to a constant c
0
.
Then the non-informed algorithm will have a runtime
of ω(n
c
1
) for any constant c
1
. The indirect assump-
tion that a polynomial attack exists means that the in-
formed algorithm will have a runtime of O ((n− k)
c
2
)
if k ≥ k
0
, the latter being a constant of the informed
algorithm. The maps of the k vertices can be chosen
in
c
0
n·(c
0
n−1)·(c
0
n−2)·. . .(c
0
n−k+1) =
(c
0
n)!
(c
0
n− k)!
ways, which can be bounded from above by (c
0
n)
k
.
Therefore, given the informed algorithm, one could
construct a non-informed algorithm that choses k dis-
tinct vertices in G, then runs (c
0
n)
k
instances of the
informed algorithm in parallel. If any of the instances
finishes, we need to test the proof of the isomorphism
returned, which if holds, is the solution of the non-
informed problem as well. Since one of the (c
0
n)
k
parallel instances has correct input, at least one in-
stance will return a correct answer not slower than
O ((n− k)
c
2
). So the runtime of the non-informed al-
gorithm is
O ((c
0
n)
k
(n− k)
c
2
) = O (c
k
0
n
k
(n− k)
c
2
)
. We might chose k = k
0
as the signature size in
the key generation, and a considerably large n, which
leads to the runtime
O (c
k
0
0
n
k
0
(n− k)
c
2
) = O (n
k
0
+c
2
) < ω(n
c
1
)
SECRYPT 2008 - International Conference on Security and Cryptography
370

, so we arrive at the contradiction that a polynomial
algorithm exists for NP.
5 EXTENSION UNDER NP = EXP
ASSUMPTION
For the much stronger assumption NP = EXP, the
runtime of the non-informed algorithm can be writ-
ten as θ(c
n
3
) - where c
3
is a constant - and a constant
signature size is no longer needed. Instead, one might
set the signature size as any such function of the key
graph size n that is contained in O (
n
lgn·ω(1)
). This sub-
linear function will be denoted as σ(n). We construct
the same parallel algorithm as before, which will have
a runtime
O (c
k
0
n
k
(n− k)
c
2
) = O (c
σ(n)
0
n
σ(n)
(n− σ(n))
c
2
)
= O (n
σ(n)
) = O (n
n
lgn·o(1)
)
= O ((e
n
)
1
o(1)
) = o(c
n
4
)
for any c
4
. Should we let c
3
= c
4
, we arrive at the
contradiction o(c
n
3
) = θ(c
n
3
).
This proof leads us to two conclusions: first,
even the random key generation can be made se-
cure if the key graph is large compared to the sig-
nature size, since the informed problem cannot be
solved 2
{bits o f information}
-times faster than the non-
informed variant; and second, our originally proposed
4|S| = 2|G| = |H| ratio was wrong, and |S| ≪ |G| is
necessary.
6 SUMMARY
In our paper we have shortly described the IzoSign
signature algorithm and the original key generation
algorithm that was broken by professor Miroslaw
Kutylowski (Kutylowski, 2007). We then presented
a new key generation method that is defended against
the type of attack used to break the same procedure in
the first version of the protocol; and given a proof of
the security of the random key generation for proper
parameter choices under the assumptions P 6= NP or
NP = EXP. We believethat our new key generation is
safe, however, we encourage breaking attempts in or-
der to fully understand the underlying Subgraph Iso-
morphism problem.
REFERENCES
Aaronson, S. (2008). Complexity zoo.
http://qwiki.caltech.edu/wiki/Complexity
Zoo.
Babai, L. (1995). Automorphism groups, isomorphism
reconstruction. In Graham, R., Gr¨otschel, M., and
Lov´asz, L., editors, Handbook of Combinatorics,
chapter 27, pages 1447–1540. Elsevier Science.
Babai, L., Grigoryev, D. Y., and Mount, D. M. (1982). Iso-
morphism of graphs with bounded eigenvalue multi-
plicity. In Proceedings of the Fourteenth Annual ACM
Symposium on Theory of Computing, pages 310–324.
ACM.
Cormen, T. H., Leiserson, C. E., and Rivest, R. L. (1990).
Introduction to Algorithms. MIT Press, Cambridge,
MA, USA.
Courtois, N. T., Finiasz, M., and Sendrier, N. (2001). How
to achieve a McEliece-based digital signature scheme.
In Advances in Cryptology – ASIACRYPT 2001, pages
157–174. Springer.
Courtois, N. T., Goubin, L., and Patarin, J. (2003).
SFLASHv3, a fast asymmetric signature scheme.
Cryptology ePrint Archive, Report 2003/211.
http://eprint.iacr.org/.
Dessmark, A., Lingas, A., and Proskurowski, A. (1996).
Faster algorithms for subgraph isomorphism of k-
connected partial k-trees. In European Symposium on
Algorithms, pages 501–513. Springer.
Dubois, V., Fouque, P.-A., Shamir, A., and Stern, J. (2006).
Breaking SFLASH. http://www.ecrypt.eu.org-
/webnews/webnews1206.htm#sflash.
European Parliament and Council (1999). Direc-
tive 1999/93/ec on a community framework
for electronic signatures. http://europa.eu.int-
/ISPO/legal/en/ecommerc/digsig.html,
http://www.legi-internet.ro/diresignature.htm.
Filotti, I. S. and Mayer, J. N. (1980). A polynomial time
algorithm for determining isomorphism of graphs of
fixed genus. In Proceedings of the Twelfth Annual
ACM Symposium on Theory of Computing, pages
236–243. ACM.
Gupta, A. and Nishimura, N. (1996a). Characterizing the
complexity of subgraph isomorphism for graphs of
bounded path-width. In STACS ’96: Proceedings of
the 13th Annual Symposium on Theoretical Aspects of
Computer Science, pages 453–464. Springer-Verlag.
Gupta, A. and Nishimura, N. (1996b). The complexity of
subgraph isomorphism for classes of partial k-trees.
Theoretical Computer Science, 164:287–298.
Hopcroft, J. and Tarjan, R. (1974). Efficient planarity test-
ing. Journal of the ACM, 21(4):549–568.
Ichikawa, S. and Yamamoto, S. (2002). Data dependent
circuit for subgraph isomorphism problem. In Pro-
ceedings of 12th International Conference on Field
Programmable Logic and Applications, pages 1068–
1071. Springer-Verlag.
Kutylowski, M. (2007). personal communication regarding
IzoSign algorithm.
Lingas, A. (1989). Subgraph isomorphism for biconnected
outerplanar graphs in cubic time. Theoretical Com-
puter Science, 63(3):295–302.
PROPER KEY GENERATION FOR THE IZOSIGN ALGORITHM
371

Lingas, A. and Syslo, M. M. (1988). A polynomial-time al-
gorithm for subgraph isomorphism of two-connected
series-parallel graphs. In ICALP ’88: Proceedings of
the 15th International Colloquium on Automata, Lan-
guages and Programming, pages 394–409. Springer-
Verlag.
Luks, E. M. (1980). Isomorphism of graphs of bounded va-
lence can be tested in polynomial time. In Proceedings
of 21st IEEE FOCS Symposium, pages 42–49.
Merkle, R. C. (1989). A certified digital signature. In Pro-
ceedings on Advances in Cryptology, pages 218–238.
Springer-Verlag.
Miller, G. (1980). Isomorphism testing for graphs of
bounded genus. In Proceedings of the Twelfth An-
nual ACM Symposium on Theory of Computing, pages
225–235. ACM.
Rivest, R. L., Shamir, A., and Adelman, L. M. (1977). A
method for obtaining digital signatures and public-key
cryptosystems. Technical Report MIT/LCS/TM-82.
Schneier, B. (1993). Applied Cryptography: Protocols, Al-
gorithms, and Source Code in C. John Wiley & Sons,
Inc., New York, NY, USA.
Spielman, D. A. (1996). Faster isomorphism testing of
strongly regular graphs. In STOC ’96: Proceedings
of the twenty-eighth annual ACM symposium on The-
ory of computing, pages 576–584. ACM Press.
Sz˝oll˝osi, L., Marosits, T., Feh´er, G., and Recski, A. (2007).
Fast digital signature algorithm based on subgraph
isomorphism. In LNCS 4856: Proceedings of the 6th
International Conference on Cryptology and Network
Security, pages 34–46. Springer.
Venkatesan, R. and Levin, L. (1988). Random instances of
a graph coloring problem are hard. In Proceedings of
the Twentieth Annual ACM Symposium on Theory of
computing, pages 217–222. ACM Press.
SECRYPT 2008 - International Conference on Security and Cryptography
372
