
Automatic Target Retrieval in a Video-Surveillance Task
Davide Moroni and Gabriele Pieri
Institute of Information Science and Technologies (ISTI)
Italian National Research Council (CNR), Via Moruzzi 1, 56124, Pisa, Italy
Abstract. In this paper we face the automatic target search problem. While per-
forming an object tracking task, we address the problem of identifying a previ-
ously selected target when it is lost due to masking, occlusions, or quick and un-
expected movements. Firstly a candidate target is identified in the scene through
motion detection techniques, subsequently using a semantic categorization and
content based image retrieval techniques, the candidate target is identified whether
it is the correct one (i.e. the previous lost target), or not. Content Based Image Re-
trieval serves as support to the search problem and is performed using a reference
data base which was populated a priori.
1 Introduction
The recognition and tracking of people in video sequences is a very challenging task
and automatic tools to firstly identify and subsequently follow a human - target - are
often subject to constraints regarding the environment under surveillance, the complete
or uncomplete visibility of the target itself and eventually privacy issues.
In this paper we investigate and detail the single subtask of automatically recover a
target within the more ample task of active video-surveillance as reported in [1].
Active video-surveillance task. In our previous work [1] we faced the global problem of
detecting and tracking a moving target, in particular processing infrared (IR) video. The
acquired information is elaborated for detecting and extracting the target in the current
frame, then active tracking is performed using a Hierarchical Artificial Neural Network
(HANN) for the recognition of the actual target. When the target is lost or occluded
a Content-Based Image Retrieval (CBIR) paradigm is applied, with the support of an
a priori populated reference database, in order to identify and localize the correct lost
target in a phase called automatic target retrieval.
The activetracking in a real time video sequence is performed through 2 sub-phases:
– target spatial localization: to identify the target in the current frame of the sequence
– target recognition: to recognize whether or not the target is the correct one to follow
An initialization step is required to start the tracking task, in detail a moving target in
the scene is detected by means of a motion detection algorithm, exploiting the thermal
characteristics of the target in relation to the IR camera characteristics. Such identi-
fied target is firstly localized and extracted through a segmentation algorithm and then
Moroni D. and Pieri G. (2008).
Automatic Target Retrieval in a Video-Surveillance Task.
In Image Mining Theory and Applications, pages 113-121
DOI: 10.5220/0002340901130121
Copyright
c
SciTePress
used to compute a set of different features containing useful information on shape and
thermal properties of the target. First of all the combination of such features is used
to assign the target a semantic class to which the it belongs to (i.e. upstanding person,
crawling, crouched, . . .).
The HANN is used to recognize, through the extracted features, included the seman-
tic class, if the target belongs to the same class it was in the previous frames or not. In
the former case active tracking is considered successful and is repeated in the following
frame acquired from the video sequence. In the latter case, a wrong object recognition
happens, this can be due to either a masking, a partial occlusion of the target, or a quick
and unpredictable movement. Following this condition the automatic search for the lost
target, supported by the CBIR, is started.
Using CBIR allows to access information at a perceptual level i.e. using visual fea-
tures, automatically extracted with appropriate similarity model [6].
The search of the target for the current frame can give a positive result (i.e. the
target is grabbed back), or a negative one (i.e. target not yet recognized), in the former
case starting from the successive frame the active tracking through HANN is performed
again, in the latter the automatic search will be performed again in the successive frame,
this condition stops after a computed number of frames is reached, in this case the con-
trol is given to the user of the system with a warning about the lost target.
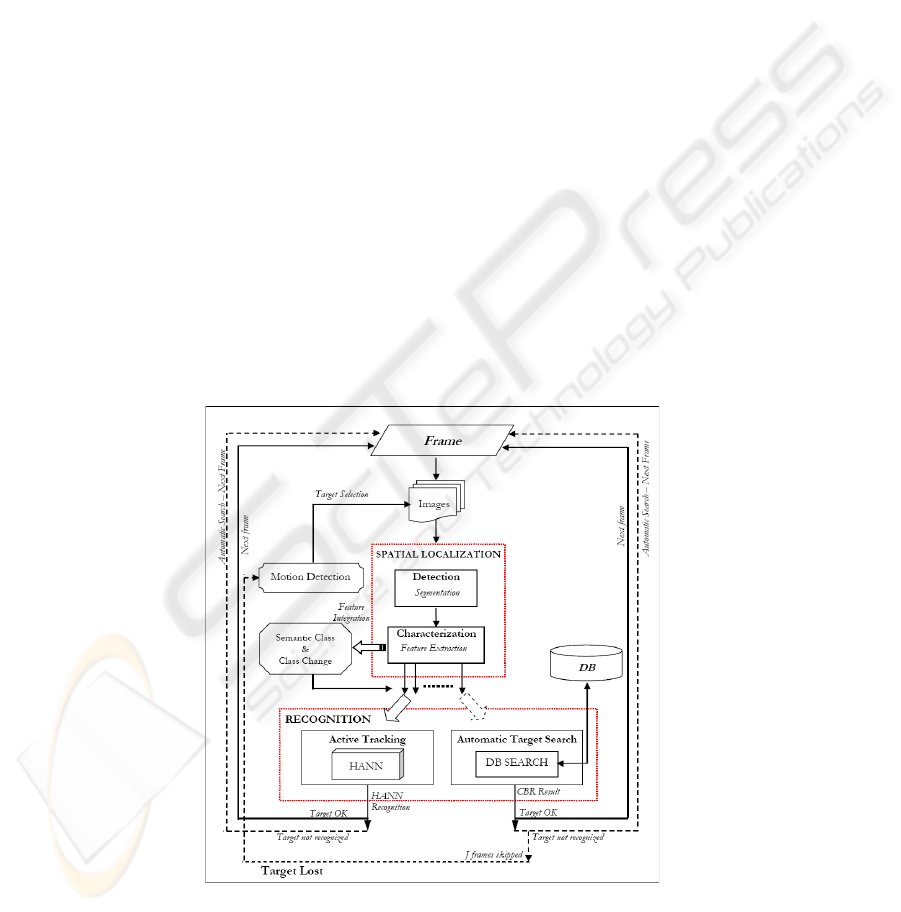
In Figure 1 the general algorithm implementing the on-line approach for the global
task of automatic tracking in video-surveillance is shown.
Fig.1. The general algorithm for the tracking in the video-surveillance task [1].
114114

The on-line active tracking process requires an off-line process in order to both: train
the neural network over selected and known examples, and populate the database used
during the CBIR for the automatic target search. The database is organized on the basis
of the predefined semantic classes computed. For each of the defined classes sets of
different shapes are stored, in order to take into account partial masking of the target
and different orientations.
In the following sections the feature selection and the CBIR stage are described in
detail.
2 Feature Selection
Once segmented, the target is described through a set of meaningful extracted features.
The features are divided into 4 main categories:
– morphological
– geometric
– thermographic
– semantic
These four different groups of visual features which are extracted from the region en-
closed by the target contour that is defined by a sequence of N
c
points (i.e in our case
N
c
= 16) having coordinates < x
s
, y
s
>, which can be described as being the outer
limit points of the target.
Morphological: Morphological features represent shape contour descriptors obtained
by means of characterization parameters extracted from a shape which is computed
through frames difference during the segmentation. This frame difference is computed
on a temporal window spanning 3 frames, this is made in order to prevent inconsisten-
cies and problems due to intersections of the shapes. Let δ(i − 1, i ) be the modulus
of difference between actual frame F
i
and previous frame F
i−1
. Otsu’s thresholding is
applied to δ(i − 1, i) in order to obtain a binary image Bin(i − 1, i). Letting TS
i
to be
the target shape in the frame F
i
, heuristically we have:
Bin(i − 1, i) = TS
i−1
[
TS
i
Thus, considering actual frame F
i
, the target shape is approximated by the formula:
TS
i
= Bin(i − 1, i)
\
Bin(i, i + 1)
Once the target shape is extracted two steps are performed: first an edge detection is
performed in order to obtain a shape contour, second a computation of the normal in
selected points of the contour is performed in order to get a better characterization of
the target.
Two low level morphological features are computed following examples reported in
[2]: the normal orientation, and the normal curvature degree. Considering the extracted
contour, 64 equidistant points < s
m
, t
m
> are selected. Each point is characterized
115115

by the orientation of its normal and its curvature K
m
. To define these local features, a
local chart is used to represent the curve as the graph of a degree 2 polynomial. More
precisely, assuming without loss of generality that in a neighborhood of < s
m
, t
m
>
the abscissas are monotone, the fitting problem
t = as
2
+ bs + c
is solved in the least square sense. Then we define:
Θ
m
= atan
−1
2as
m
+ b
(1)
K
m
=
2a
(1 + (2a s
m
+ b)
2
)
3/2
(2)
Moreover the histogram of the normal orientation, discretized into 16 different bins,
corresponding to 16 equi-angular directions, is extracted.
Such a histogram is invariant for scale transformation and, thus, independent from
the distance of the target, hence it will be used for a more precise characterization of
the semantic class of the target. This distribution represents an additional feature to
the classification of the target e.g. a standing person will have a far different normal
distribution than a crouched one. A vector [v(Θ
m
)] of the normal for all the points in
the contour is defined, associated to a particular distribution of the histogram data.
Geometric: Geometric features are computed on the basis of the contour, and thus the
shape, previously extracted. Two main features are computed: Area and Perimeter of
the actual shape to be characterized.
–
Area =
N
c
X
i=1
[(x
s
y
s+1
) − (y
s
x
s+1
)]
/2
–
P erimeter =
N
c
X
s=1
p
(x
s
− x
s+1
)
2
+ (y
s
− y
s+1
)
2
Thermographic: Considering the nature of the acquired images in our video-surveillance
task, i.e. infrared images, we choose to exploit the specific characteristics, such as the
thermal radiation value of the target in each point of the image, to improve the efficiency
of the system. Thus, more specific and IR oriented features are extracted and described
below.
– Average Temp:
µ =
1
Area
X
p∈T arget
F
i
(p)
116116

– Standard deviation:
σ =
s
1
Area − 1
X
p∈T arget
(F
i
(p) − µ)
2
– Skewness:
γ
1
= µ
3
/µ
3/2
2
– Kurtosis:
β
2
= µ
4
/µ
2
2
– Entropy:
E = −
X
p∈T arget
F
i
(p)log
2
(F
i
(p))
Where F
i
(p) represents the thermal radiation value acquired for the frame i on the
image point p, and µ
r
are moments of order r.
Semantic Class: Organizing the images in the DB through predefined semantic classes
enables the possibility of categorizing them and hence allowing to perform class-specific
searching that is more selective and efficient [5].
The semantic class the target belongs to (e.g. upstanding person, crouched, crawl-
ing, etc. . .) can be considered as an additional feature and is automatically selected,
considering combinations of the above defined features, among a predefined set of pos-
sible choices and assigned to the target.
Moreover a Class-Change event is defined which is associated with the target when
its semantic class changes in time (different frames). This event is defined as a couple
< SC
b
, SC
a
> that is associated with the target, and represents the modification from
the semantic class SC
b
selected before and the semantic class SC
a
selected after the
actual frame. This transition is considered in order to evaluate more complex situations
in the context of a surveillance task, e.g. a person who was standing before and is
crouched in the next frames, when identified by its class change, can be given a specific
weight different from other class changes.
In order to retrieve when the semantic class of the target changes, important features
to consider are the morphological features, and in particular an index of the normal
histogram distribution.
All the extracted information is passed to the recognition phase, in order to assess
whether or not the localized target is correct.
3 Automatic Target Search
When wrong target recognition occurs, due to masking or occlusion, or quick move-
ments in unexpected directions, the automatic target search starts.
In CBIR systems low-level feature vectors are generated to represent the query and
the images to retrieve, while in this system a semantic-based image retrieval is per-
formed, hence a semantic concept is defined by means of sufficient number of training
117117
examples containing these concept [5]. Once the semantic concept is defined it is used
to make a selective and more efficient access to the DB, onto which typical CBIR for
images is performed on the low level features.
The features of the candidate target are compared to the ones recorded in a refer-
ence database using a similarity function for each feature class [3]. In particular, we
considered color matching, using percentages and color values, shape matching, us-
ing the cross-correlation criterion, and the vector [v(Θ
m
)] representing the distribution
histogram of the normal. First of all the reference semantic class is used as a filter in
order to access the database information in a more efficient manner [7]. Each of these
similarity values is associated to a predefined weight, hence a single global similarity
measure is computed. For each semantic class, possible variations of the initial shape are
recorded. In particular, the shapes to compare with are retrieved in the database using
information in a set obtained considering the shape information stored at the time of the
initial target selection joined with the one of the last valid shape. If the candidate target
shape has a similarity measure which has a distance below a fixed tolerance threshold,
to at least one shape in the obtained set, then it can be considered valid. Otherwise the
search starts again in the next frame acquired [4].
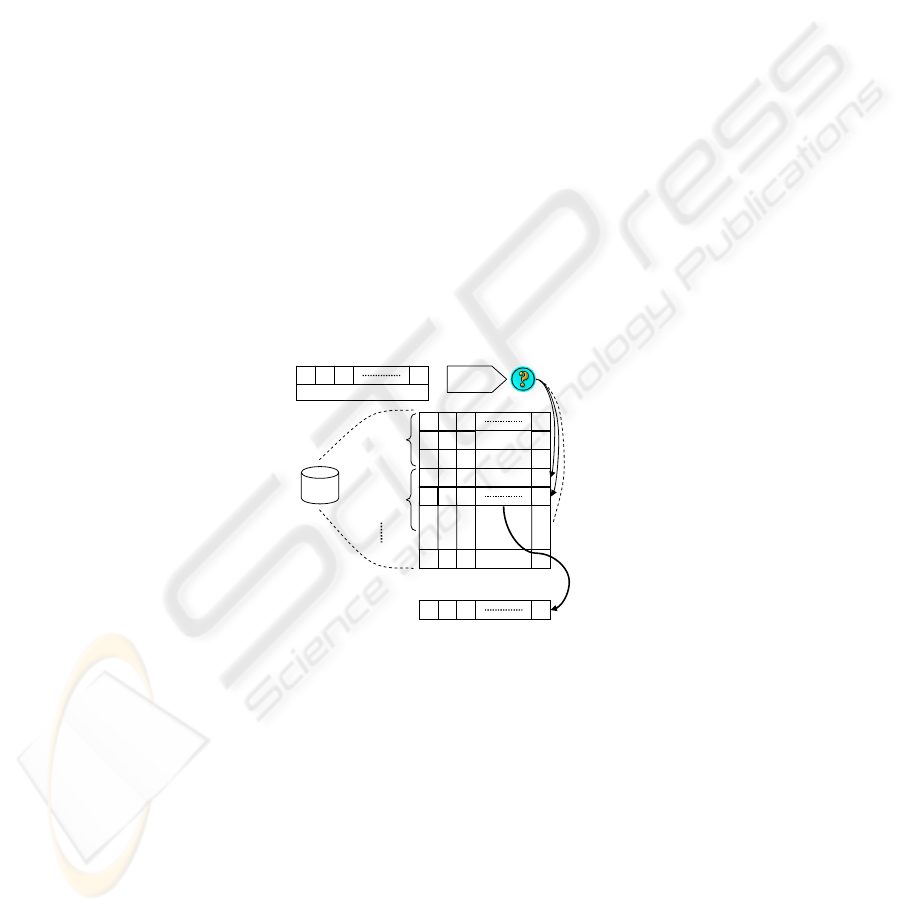
In Figure 2 a sketch of the CBIR in case of automatic target search is shown consid-
ering with the assumption that the database was previously defined (i.e. off-line), and
considering a comprehensive vector of features < F t
k
> for all the above mentioned
categories.
F
1,i
F
2,i
F
3,i
F
n,i
Semantic
Class a
Semantic
Class b
Semantic
C
lass b
DB
Ft
1,k
Ft
2,k
Ft
3,k
Ft
n,k
Most Similar
Pattern
F
1,k
F
2,k
F
3,k
F
n,k
E
xtracted Features
Ft
1
Ft
2
Ft
3
Ft
n
Query
Fig.2. Automatic target search with the support of the Content-Based Image Retrieval and driven
by the semantic class feature.
Thus, if a pattern is found through CBIR in the database, which has a similarity mea-
sure higher than the prefixed threshold, then the automatic search has success and the
target is grabbed back for the active tracking in the next frame of the video sequence.
Otherwise automatic search will be performed again in the next frame, considering the
last valid shape (i.e. the target shape of the last correct target) as a starting point.
If after j frames the correct target has not yet been grabbed, the control is given back
to the user. The value of j is computed considering the Euclidean distance between the
centroid C
v
of the last valid shape and the edge point of the frame E
r
along the search
118118

direction r, divided by the average speed of the target previously measured in the last f
frames:
j = kC
v
− E
r
k/
P
f
i=1
step
i
f
!
(3)
where step
i
represents the distance covered by the target between frames i and i − 1.
4 Results and Conclusions
The automatic target search problem has been faced in a general real case study for
video surveillance application to control unauthorized access in restricted access areas.
The videos were acquired using a thermocamera in the 8 − 12µ
m
wavelength range,
mounted on a moving structure covering 360
◦
pan and 90
◦
tilt, and equipped with 12
◦
and 24
◦
optics to have 320 × 240 pixel spatial resolution.
The database for the CBIR was built taking into account different image sequences
relative to different classes of the monitored scenes. In particular, the human class has
been composed taking into account three different postures (i.e. upstanding, crouched,
crawling) considering three different people typologies (short, medium, tall).
The estimated number of operations performed for each frame when tracking per-
sons consists of about 5 · 10
5
operations for the identification and characterization
phases, while the active tracking requires about 4 · 10
3
operations. This assures the
real time functioning of the procedure on a personal computer of medium power. The
automatic search process can require a higher number of operations, but it is performed
when the target is partially occluded or lost due to some obstacles, so it can be reason-
able to spend more time in finding it, thus loosing some frames. Of course, the number
of operations depends on the relative dimension of the target to be followed, i.e. bigger
targets require a higher effort to be segmented and characterized. The acquired images
are pre-processed to reduce the noise. In Figure 3 example frames of video sequences
are shown (top) together with their relative shape extraction.
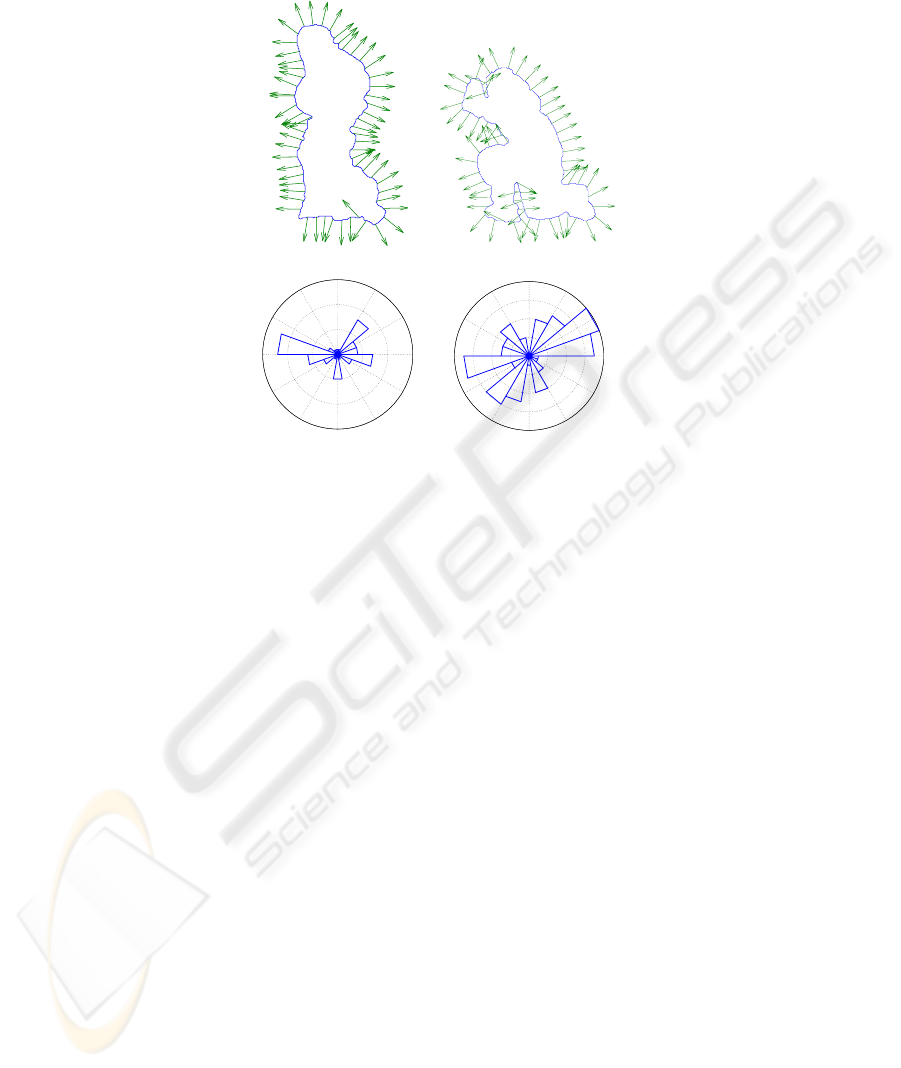
While in Figure 4 the same frames are processed, and shape contour with distribu-
tion histogram of the normal are shown.
A methodology has been proposed for the Content Based Image Retrieval problem
in a video-surveillance task, when the tracking target is lost or occluded, and needs to
be grabbed back again. Target recognition during active tracking has been performed,
using a Hierarchical Artificial Neural Network (HANN). In case of automatic search-
ing of a masked or occluded target, a Content-Based Image Retrieval paradigm has been
used for the retrieval and comparison of the currently extracted features with the previ-
ously stored in a reference database. The reference database has been implemented and
populated following an approach based on semantic categorization of the information.
Acknowledgements
This work was partially supported by EU NoE MUSCLE - FP6-507752. We would
like to thank Eng. M. Benvenuti, head of the R&D Dept. at TDGroup S.p.A., Pisa, for
allowing the use of proprietary instrumentation for test purposes.
119119

References
1. Moroni, D., Pieri, G.: Active video-surveillance based on stereo and infrared imaging. J. Ap-
plied Signal Processing, (in press). (2007)
2. Berretti, S., Del Bimbo, A., Pala, P.: Retrieval by shape similarity with perceptual distance
and effective indexing. IIEEE Transactions on Multimedia, Vol. 4(2). (2000) 225–239
3. Tzouveli, P., Andreou, G., Tsechpenakis, G., Avrithis, Y.: Intelligent visual descriptor ex-
traction from video sequences. Lecture Notes in Computer Science - Adaptive Multimedia
Retrieval, Vol. 3094. (2004) 132–146
4. Di Bono, M.G., Pieri, G., Salvetti, O.: Multimedia target tracking through feature detection
and database retrieval. In: 22
nd
International Conference on Machine Learning - ICML 2005.
Bonn, Germany. August (2005) 19–22
5. Rahman, M.M., Battarcharya, P., Desai, B.C.: A framework for medical image retrieval using
machine learning and statistical similarity matching techniques with relevance feedback. IEEE
Trans. on Inform. Tech. in Biomedicine, Vol. 11(1). (2007) 58–69
6. Smeulder, A., Worring, M., Santini, S., Gupta, A., Jain, R.: Content-based image retrieval at
the end of the early years. IEEE Trans. on Pattern Analysis and Mach. Intell., Vol. 22(12).
(2003) 1349–1380
7. Chen, Y., Wang, J.Z., Krovetz, R.: CLUE: cluster-based retrieval of images by unsupervised
learning. IEEE Trans. on Image Proc., Vol. 14(8). (2005) 1187–1201
Fig.3. The original frame (top), shape extraction by frames difference (bottom). Left and right
represent two different postures of a tracked person.
120120
50 100 150 200
−350
−300
−250
−200
−150
−100
40 60 80 100 120 140 160 180 200
−260
−240
−220
−200
−180
−160
−140
−120
−100
5
10
15
30
210
60
240
90
270
120
300
150
330
180
0
2
4
6
8
30
210
60
240
90
270
120
300
150
330
180
0
Fig.4. Shape contour with normal vector on 64 points (top), distribution histogram of the normal
(bottom). Left and right epresent two different postures of a tracked person (same frames as in
Figure 3.
121121
