
HOW TO EASILY DESIGN REUSABLE BEHAVIOURS FOR
SITUATED CHARACTERS?
Tony Dujardin and Jean-Christophe Routier
Laboratoire d’Informatique Fondamentale de Lille, Universit´e des Sciences et Technologies de Lille, France
Keywords:
Behaviour, Action selection, Situated agent, Video games.
Abstract:
Since the action selection mechanism chooses the next fired action, we claim that it is the place where the
character’s behaviour is defined. We propose an ASM wich is able to produce believable and reusable be-
haviours for situated cognitive characters. It is defined as a combination of several motivations. It is modular
and robust to evolutions of the environment, hence the designer task of building behaviour is made easier. The
design of NPC in MMORPG can particularly derive benefit from this ASM.
1 INTRODUCTION
The construction of human behaviour is a complex
and ambitious application field of AI. The very defi-
nition of a realistic or human-level behaviour is com-
plex, the most famous answer is certainly Alan Tur-
ing’s. Reaching such an AI is not yet at hand. How-
ever it is possible to consider simplified instances
of this problem and to try to tackle them. Games,
since they provide a well defined and bounded con-
text, have always been a good AI target. We join au-
thors in (Laird and van Lent, 2000) to consider that
video games are the good target, from experimen-
tal or application point of views, for research on be-
lievable behaviours. In particular the management of
so called “Non Player Characters” (NPC) has to be
considered. The construction of believable NPC be-
haviour enhances the playability of video games, as
well as the interest of the players since immersion is
increased. It has become a real challenge in video
games industry. In this domain, there are a lot of re-
lated works. Nevertheless, almost of these works try
to find an optimal resolution to build behaviours and
these built behaviours are fitted to a particular context
and game. They must be rebuilt when some elements
in the game change or are added. Therefore they are
not suited to game in permanent evolution. This is the
case of Massively Multiplayer Online Role Playing
Game (MMORPG). In these games, development is
incrementally done. New features are often added to
the game and the NPC behaviour must then be able to
adapt and to take these evolutions into account with-
out further software development.
In this paper, we propose an easy-to-design Action
Selection Mechanism (written ASM) dedicated to sit-
uated believable characters like video-games NPC
are. It permits to easily define several different and
cognitively plausible behaviours. It does not aim to
solve problems in optimal ways. We are mainly in-
terested in the creation of diversified and realistic be-
haviours. Our ASM wants to produce reusable be-
haviours, allows characters to be self-sufficient in ev-
ery compliant environments, and has explicit settings
(it does not require training period).
In section 2, we present the context of this work
and its needs. In section 3, we present our solution to
build situated character behaviours using our model
of ASM. We also define a concrete behaviour which
can be obtained with our ASM. We instantiate and
experiment it in section 4, before concluding.
2 CONTEXT AND GOAL
Our purpose is to define a mechanism to build
believable behaviours for situated characters like
MMORPG’s NPC. We consider the desired properties
for this mechanism according to the targeted applica-
tion, that is video-games and especially MMORPG.
MMORPG corresponds to a model of “always-
running” applications. The software development of
these applications is incremental and new elements
and abilities can be added in the game. The mech-
anism to design behaviours must be able to adapt to
these evolutions without software development. An-
other work of the application designer is to distin-
167
Dujardin T. and Routier J. (2009).
HOW TO EASILY DESIGN REUSABLE BEHAVIOURS FOR SITUATED CHARACTERS?.
In Proceedings of the International Conference on Agents and Artificial Intelligence, pages 167-172
DOI: 10.5220/0001544601670172
Copyright
c
SciTePress

guish characters, not only in their graphical repre-
sentations but also in their behaviours. In conse-
quence, the mechanism to design behaviour must be
reusable, extensible and must allow several different
behaviours. We affirm that it is possible to have a
mechanism that is robust with respect to evolutions in
the game. This mechanism must be built regardless
environment and characters abilities. Finally, it must
provide several different behaviours that can be reuse
in other applications.
The character must be believable. It is situated, then
the mechanism must take into account the character’s
environment and even whether the character is cogni-
tive, reactive-like behaviour must be possible. More-
over, to resolve its goals, character must avoid to os-
cillate between several actions (as Tyrell named the
“contiguous action sequences” in (Tyrrell, 1993)). In
addition, the character must express individuality, this
should be illustrated by different action choices be-
tween characters if they are faced to the same situ-
ation. Moreover a character must be able to express
preferences (attraction or reluctance) on actions that it
is induced to execute. In opposition to SOAR (Laird
et al., 1987) and ACT-R (Anderson et al., 2004), our
proposal is not that our characters solve their goals in
an optimal way (with respect to the number of actions
for example), but we are interested in the building of
reusable and varied behaviours with the same engine.
Lastly, the character must take into account the others,
since it can compete or cooperate with them. This has
a social impact on the behaviour.
In summary, the mechanism to design situated
character’s behaviourmust be defined regardless from
the environment and the character’s abilities. It must
provide modular, believable and easy to design be-
haviours. We assert that our ASM can be this mecha-
nism.
3 BUILDING BEHAVIOURS
In (Seth, 1998) the behaviour is defined as a joint
product of character, environment and observer. This
definition based on the ethology permits to say that
the behaviour results from the set of the actions that a
character have performed in an environment. Since an
action selection mechanism chooses the next fired ac-
tion, we claim that it is the place where the character’s
behaviour is defined. Then our purpose is to propose
an ASM that is able to produce believable behaviours
for situated cognitive characters.
In this work, we consider cognitive situated char-
acters performing in an environment supplied with
an euclidean space, where neighborhood and distance
notions have meanings. A set of abilities (or effec-
tors) describes the laws that rule the environment.
Each character is provided with its own set A of some
of these abilities and thus is able or not to perform a
given action on the environment. It results that char-
acters differ. Known abilities can change too, they can
be added or removed.
Each character receives goals that it has to solve.
To do it, a character is composed of a perception mod-
ule, a memory, a planning engine and an ASM. The
character’s execution cycle is as follows. First, it per-
ceives and collects new informations from its envi-
ronment and adds these informations to its memory.
Second, according to its abilities and the informations
coming from its memory, it builds (or modifies) its
plans in order to solve its goals. Third, an action se-
lection mechanism selects the “best” action among
the runnable actions emphasized by the plan. Last,
the character will carry out the selected action. Then
the process starts again. We make the assumption that
the planning engine produces the plans and we only
address, in this paper, the action selection problem.
While building the plans, the engine exhibits the
set A
R
⊂ A of runnable actions which are the ac-
tions present in the plans and that can be immedi-
ately executed by the character. Executing such an
action should help to solve at least one of the char-
acter’s goals. The purpose of the ASM is to select
one among these actions. For this, the ASM assigns a
value to each action in A
R
and selects the action with
the highest value. The value is computed as the com-
bination of several criteria or evaluator values, each
expressing a behavioural feature. Each evaluator e
i
is
defined by the function γ
e
i
:
γ
e
i
: A
R
→ R
a 7→ value
For each action a in A
R
the final note φ uses a
combinator function Comb to aggregate the n evalua-
tors:
Comb : R
n
→ R
φ : A
R
→ R
a 7→ Comb(γ
e
1
(a), ··· , γ
e
n
(a))
Hence, the ASM returns the runnable highest val-
ued action α:
α ∈ A
R
| φ(α) = max
a∈A
R
{φ(a)}
Even if functions γ
e
and Comb are the same for all the
characters, different behaviours can be obtained and
observed.
3.1 Modular Behaviour
As mentioned above, the behaviour results from the
set of the actions that a character have performed in
an environment. These actions have been selected
ICAART 2009 - International Conference on Agents and Artificial Intelligence
168
among the character abilities. We can remark that this
action selection can depend on some constraints. For
instance, to eat a character can prefer “cooking frozen
food” instead of “going to the restaurant” because it
is tired. In fact, the behaviour is induced (in posi-
tive or negative ways) by some motivations. We adapt
the motivational approach by Jacques Ferber (Ferber,
1999) to build our behavioural engine. According to
this, we propose to define the behaviour as actions
resulting from the set of motivations suffered by the
character. For each motivation, we build an evaluator
(and its evaluation function γ) which impacts the ac-
tion selection. All of these evaluators are combined
to obtain the final character choice. Then the ASM
can be seen as an aggregator of motivations. Each
evaluator exerts a constraint on the selection and cor-
responds to a motivation. This ASM is modular and
easy to design : to add (resp. remove) a motivation
requires only to add (resp. remove) the related eval-
uator. Each evaluator is understandable, because it
corresponds to a specific motivation. Moreover,what-
ever the game or the application, a motivation can be
described in the same manner and so the evaluator can
be reused. The advantage is to be able to give an inter-
pretation for each motivation and to be able to define
the broad lines of the built behaviour. For example to
take into account the feature of “being opportunist”
in the agent’s behaviour, it requires to define an eval-
uator to express this motivation. Moreover building
evaluators from motivations permits to define them
regardless environment and abilities, and to take them
into account to obtain a more believable behaviour.
Since this ASM is modular, reusable and impervi-
ous to the game evolutions, it is a robust mechanism
to easily design situated character behaviours.
3.2 Believable Behaviour
Our preoccupation lies only in the production of be-
haviours. In this point of view, the purpose is not to
produce “the optimal” behaviour but rather to obtain
several believable behaviours. But, what does “be-
lievable” mean and how to evaluate it? This is of
course a difficult, even impossible, question. In or-
der to try to answer it, we will consider the desired
properties for the ASM according to the targeted ap-
plication, that is MMORPG and more precisely con-
sider the gamer’s points of view. To be believable, a
situated character must be aware of its environment,
its inner state and the other characters. Jacques Ferber
(Ferber, 1999) proposes a classification of the motiva-
tions in four categories according to their origins : the
personal motivation groups the motivations due to the
character itself, the environmental motivation is used
to make the character reactive to its percepts and its
environment, the relational motivation relates to the
presence of the other characters and the social moti-
vation relates to norms or social rules.
Depending on the desired behaviour, the designer
can choose to have zero or several evaluators from
each motivations.
Notion of Alternative. For an ASM, to choose an
action among runnable actions amounts to select one
path among all the possible ways to solve the charac-
ter’s goals. Indeed, considering the character’s knowl-
edge and abilities, the planing engine proposes se-
quences of actions to solve its goal. For a given goal,
several sequences can be possible. We name alterna-
tive such a sequence. It obviously results that several
alternatives can exist for a given action node. When
the ASM works, it does not only choose an action but
actually one (or several) alternative whose first se-
quence step is the chosen action. This is important
since, to be realistic, a character behaviour should not
deviate too much from a goal resolution. Oscillations
between several alternatives should be avoided. The
action selection mechanism must therefore take into
account the alternatives in their whole while perform-
ing its choice. Thus, we do not want a character to be
involved in a goal resolution and then to change be-
cause an action in the alternative is inconsistent with
its personality. Moreover, the mechanism takes into
account the future actions of the character in long-
term predicted by the planing engine, and so must
consider actions to be executed in the alternative later.
It results that the action selection should not focus on
choosing the preferred action at each step, but the pre-
ferred way to resolve the goals and therefore the pre-
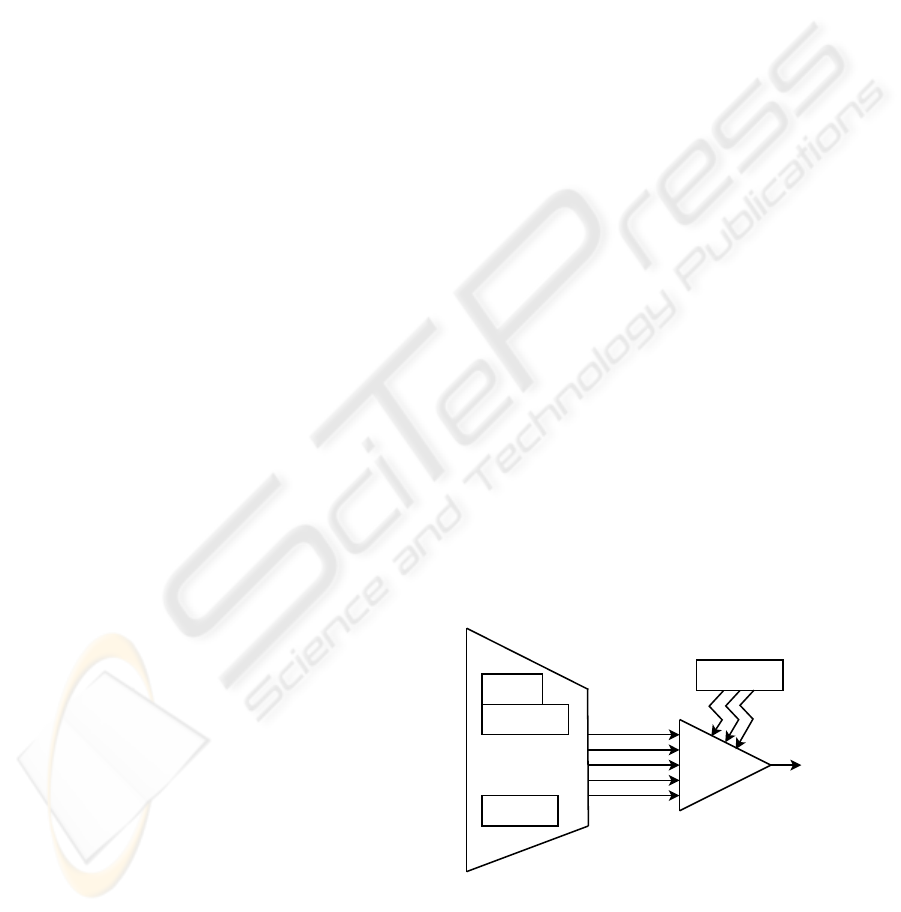
ferred alternative (see figure 1).
Planing
Engine
ASM
Abilities
Knowledge
Goals
Alternatives
Runnable
Action
Motivations
Figure 1: Alternatives are calculated by the planing engine,
the best one is chosen by the action selection mechanism.
After that, the ASM exhibits the related runnable action.
HOW TO EASILY DESIGN REUSABLE BEHAVIOURS FOR SITUATED CHARACTERS?
169

3.3 Easy to Design Behaviour
We build an ASM in following three steps. First, we
identify desired behaviour motivations. Second, we
define a combination function. Latter, according to
the chosen combination function, we define for each
behaviour motivation an evaluator and its evaluation
function γ.
To achieve an ASM that fits well in obtaining
the desired situated character’s behaviours, we
propose several possible motivations for personal,
environmental and social categories of motivations.
Firstly, concerning personal motivations:
Goal Influence. Whose purpose is to take into ac-
count that, for a given character, the different
goals can have different priorities particular to
this character. Goal priority can relate to one in-
ner parameter. This allows to express some be-
havioural features like, for example, the survival:
the lower is the character’s energy (an inner pa-
rameter value), the more in bad state it is, then
the higher the priority of goal “keep the character
alive” should be.
Character Preferences. A character can have several
personality traits, for instance it can be “brutal”
and “greedy”. So this character prefers to break
a door and to eat an apple instead of opening the
door and practicing some physical exercises. Thus
each character has its own preferences on actions.
These preferences express how much the charac-
ter would be inclined to use the action. Then, it
should be possible to express neutral feeling, at-
traction, inhibition or even repulsion for the ac-
tion. This feature is a mean to express charac-
ter’s personality considering that the personality
expresses through the executed actions.
Achievement in Time. Each action can take more or
less time to be executed. This cost can be taken
into consideration for promoting the alternative
that takes the less time to be resolved.
Multi-goal Revalorization. If the same runnable ac-
tion allows to solve several agent goals, then this
action makes progress quicker towards the goal
achievement and must be favoured.
Inertia. When a agent is involved in a goal resolution
(in an alternative), inertia expresses the charac-
ter’s trend to continue in the same alternative.
Secondly, considering the environmental motiva-
tions:
Opportunism. Behaviour must benefit from the sur-
roundings. Because the character is situated, it
can evaluate distances between it and other en-
tities. Thus, it is possible to take into account
whether or not the target of an action is close to
the character. Therefore the opportunism evalua-
tor influences the ASM in order to favour an ac-
tion whose target is nearby. This feature intro-
duces reactive-like behaviours. The main effect
of this feature is to bring the character to be tem-
porarily diverted from a goal because of its situ-
ation. This feature expresses the opportunist be-
haviour.
Achievement in Space. This evaluator promotes al-
ternatives issued from goals that can be accom-
plished in a few steps, hence the importance of
localization. Thus achievement in space will push
the character to be diverted from a goal to achieve
actions of another goal which can be solved in few
actions.
Finally, we consider the relational motivations :
Altruism. This feature expresses how much it is in-
clined to help others. It balances the importance
of the other’s goals with its owns.
Reputation. To decide whether or not it helps an-
other, a character can refer to the reputation of
the other. This reputation can result from social
exchanges and history or from relative social sta-
tus of both characters. For example, a character
will be strongly inclined to execute goals (orders)
given by a higher ranked character.
In our ASM proposition, we are akin to the per-
sistence, activations proportional to current offsets,
balanced competition, contiguous action sequences,
interrupts if necessary, opportunism, combination
of preferences, flexible combination of stimuli and
compromise candidates criteria listed by Tyrrell in
(Tyrrell, 1993).
Combination Function. The evaluator values are
aggregated using the Comb function. This function
plays a similar role to the arbitrator of DAMN (Rosen-
blatt, 1995). Therefore it has an important influence
in the interpretation of the evaluations that obviously
depends on the used function. Thus, depending on
the chosen function, the value returned by an evalu-
ator can promote or penalize the action. Hence, it is
obvious that the used combination function must be
known while defining the evaluator’sfunctions. In the
same way the range of the values must be defined. It
is possible for a combination function to let the pos-
sibility to the evaluator to be neutral or to express
attraction, repulsion or even inhibition. Then for an
evaluator, returning 1 is interpreted as neutral, a value
greater than one means that the feature promotes the
ICAART 2009 - International Conference on Agents and Artificial Intelligence
170
action, a value between 0 and 1 penalizes, and 0 im-
plies an inhibition that annihilates all the other fea-
ture’s motivations. We present here a solution to eas-
ily design an ASM for MMORPG.
4 EXPERIMENT
We will present here one of our experiments leaded to
validate our ASM and the various motivations. This
experiment’s ASM uses a Comb function which is
the multiplication operator composed with a multi-
goal revalorization. All the inner and environment
motivations are implemented but the experiment does
not consider the social and relational motivations. We
do not have enough space here to detail all the used
operators. We focus on two of them : character pref-
erences and opportunism.
Character Preferences. The whole alternative is
considered, gathered and combined to produce
this motivation value. The evaluator, γ
pref
, is de-
fined as follows:
∀α ∈ A
R
, γ
pref
(α) = Pref(alternative(α))
where alternative is the function which gathers
the preferences of all the actions in the alternative
of α and Pref is the combination function, here,
the harmonic mean.
Opportunism. Outside the opportunism range θ
opp
,
targets have no influence and actions receive the
neutral value. Inside, the closer a target is, the
most favoured the corresponding runnable action
is. The evaluator, γ
opp
, of the opportunism is de-
fined as follows:
∀α ∈ A
R
, γ
opp
(α) = max
1, 1+ log
θ
opp
(
θ
opp
dist(c,target(α))
)
where c is the acting character and target the
function that returns the closest known target for
action α.
In the experiment, we consider a situated cogni-
tive character c distinguished by a radius vision and
an inner attribute representing its energy. The value
of this attribute decreases at each step. c’s abilities are
move, take, eat, break, unlock, open, explore
1
. Pref-
erences are assigned to these properties and since we
decide that we want a character which leans to be bru-
tal, we give a preference value of 1.5 (attraction) to
break and give 0.7 (reluctance) to unlock. Other abil-
ities receive a neutral value (i.e. 1). These choices
should lead c to prefer to break door rather than to
unlock them (since doors will be the only possible tar-
gets for these actions).
1
The action to explore allows our agent to scout for an
unknown target.
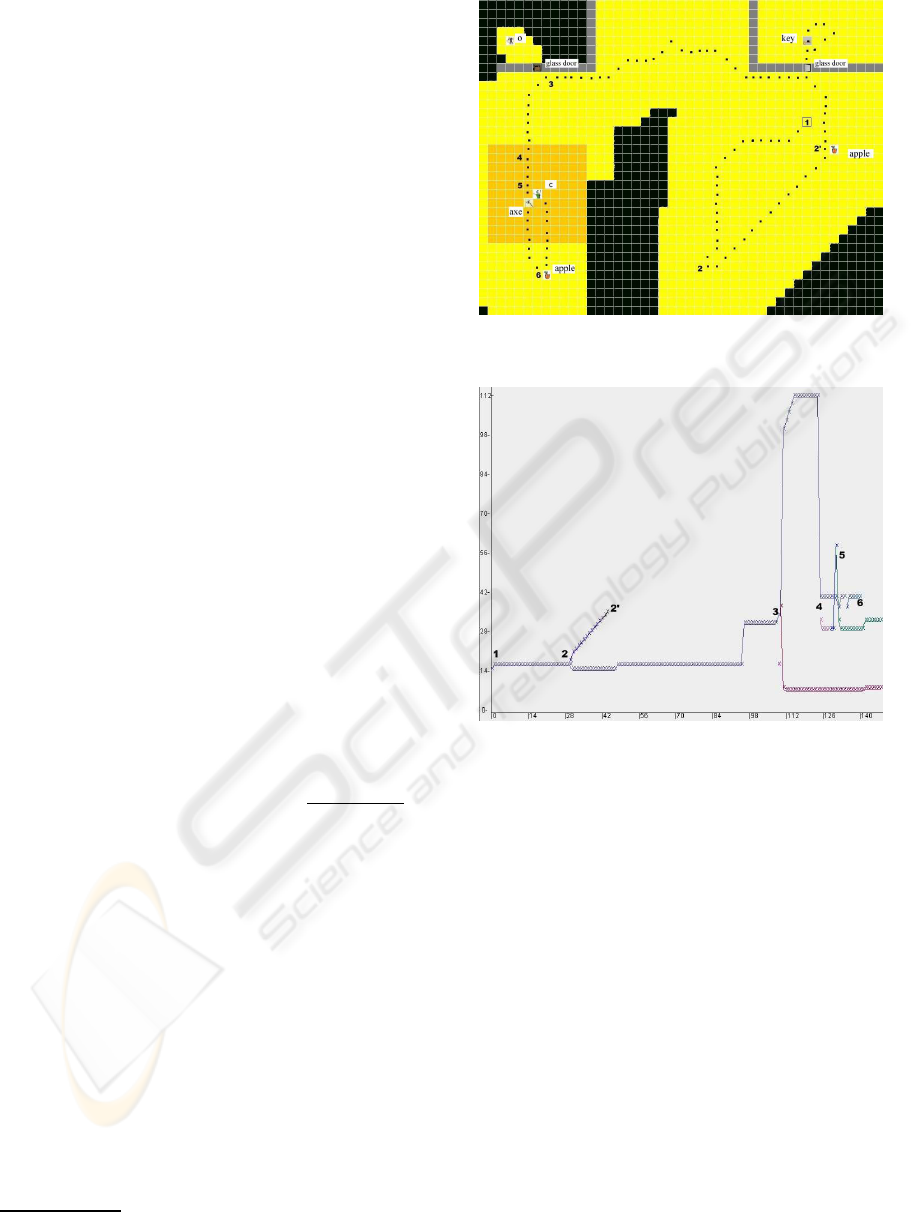
Figure 2: The environment.
Figure 3: The runnable actions ASM values curves (the or-
donate) during the steps on the simulation (the abscissa).
Once built (and only then), c is situated in an en-
vironment, for example the one of Fig 2. Then we as-
sign goals to c. In our particular case, its first goal, g
1
,
is to take the object o in the upper-leftroom, locked by
a glass door whose key is in the upper-right room. Its
second goal, g
2
, is to maintain its energy level above
some value v. g
1
receives a constant priority. Prior-
ity of g
2
depends on the energy attribute’s value. Two
apples and one axe are present in the environment,
eating an apple gives energy and the axe can be used
to break a door. c does not have a priori knowledge on
the environmentand must explore it. Unknown places
appear in black in figure 2 where the vision radius can
also be perceived. At each step c executes the action
chosen by the ASM in order to solve the goals. The
trajectory is showed with black dots.
Let us consider the run of c. At the beginning, c
is located at point 1, it perceives only the right apple.
Since its starting energy level is above v. The only
HOW TO EASILY DESIGN REUSABLE BEHAVIOURS FOR SITUATED CHARACTERS?
171

active goal is g
1
(i.e. because g
2
is satisfied, its prior-
ity is −∞). Since c does not know the environment,
c explores it to find o. Figure 3 shows the different
values given to runnable actions by the ASM. At the
beginning, the sole runnable action is explore, hence
it is chosen. While exploring, c loses energy, reach-
ing point 2. Its energy level falls under v, then g
2
re-
ceives a priority depending on the energy value. It im-
plies that the move to apple (to eat it) action becomes
runnable. As shown in the chart, its value is the great-
est, then c choses to move towards the apple. Since its
energy decreases during these moves, the priority of
this action increases too. In point 2’, c eats the apple,
receives energy and g
2
becomes inactive again and c
explores again to find o. Reaching point 3, c perceives
o, trying to open door, c “learns” that it is locked. The
plan proposes then 2 possibilities to pass through the
door: to unlock or to break it. Then two runnable ac-
tions arise corresponding to both alternatives: first,
move towards the previously perceived key, second
explore to find something to break the door. Since
c’s personality leans to be brutal and then c prefers to
break rather to unlock, this explains why the alterna-
tive including the explore action is favoured in com-
parison to the one with move. The latter corresponds
to the lowest curve starting from 3 and the first to the
uppermost curve. The latter is especially high since,
by coincidence, at the same time, g
2
becomes active
again, then explore is again runnable in order to find
some food, and multigoal revalorization promotes ex-
plore. Exploring, c goes “down” and perceives the
axe once at 4. Then runnable action, for break is no
more explore, but take axe, which corresponds to the
new curve in the middle. And explore loses multi-
goal revalorization. This explains why the uppermost
curve weakens. But it still remains the most priori-
tary. Then reaching 5, because of opportunism since
c is close to the axe, the runnable action take axe is
favoured and becomes the most prioritary one. The
peak at 5 is then due to opportunism. The correspond-
ing small collapse of explore is due to the temporary
lose of inertia. Once axe is taken, opportunism moti-
vation disappears and explore becomes again the most
prioritary, then c finds and eats the second apple in 6.
break the door is the action selected by the ASM. c
moves “up” towards the door, breaks it and takes o
(not shown).
This small experiment illustrates the ASM’s
work and the various motivations: opportunism,
goals, preferences, inertia, multigoal revalorization.
Achievements in time and space are not hightlighted
here but have been evaluated in other experiments.
5 CONCLUSIONS
“Always-running” applications are a very constraint
context to behaviour designers. We propose a model
of action selection mechanism defined as a combi-
nation of several motivations. This ASM allows to
define modular, believable and easy to design be-
haviours. Since it is robust to evolutions of the en-
vironment and motivations are understandable, the
designer task of building behaviours is made easier.
Such an ASM can be used to design the behaviour of
believable cognitive situated characters like NPC in
video games. Characters can be easily distinguished
and various personalities can be obtained. A concrete
proposition has been done and experiments have been
made to validate it.
Forthcoming works concern the implementation
of relational evaluators and the carrying out of other
experiments. Simultaneously a collaboration is in
progress with a MMORPG company to use this ASM.
Other motivations are investigated too, for instance
emotional feature.
REFERENCES
Anderson, J. R., Bothell, D., Byrne, M. D., Douglass, S.,
Lebiere, C., and Qin, Y. (2004). An integrated theory
of the mind. Psychological Review, 111(4).
Ferber, J. (1999). Multi-Agent Systems. An Introduction to
Distributed Artificial Intelligence. Addison Wesley.
Laird, J. E., Newell, A., and Rosenbloom, P. S. (1987).
SOAR: An architecture for general intelligence. Ar-
tificial Intelligence.
Laird, J. E. and van Lent, M. (2000). Human-level AI’s
Killer Application: Interactive Computer Games. In
the 17th Natl Conf. on Artificial Intelligence.
Rosenblatt, J. K. (1995). DAMN: A distributed architecture
for mobile navigation. In the AAAI Spring Symposium
on Lessons Learned from Implemented Software Ar-
chitectures for Physical Agents.
Seth, A. (1998). Evolving action selection and selective at-
tention without actions. In the 5th International Con-
ference on Simulation of Adaptive Behavior.
Tyrrell, T. (1993). Computational Mechanisms for Action
Selection. PhD thesis, University of Edinburgh.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
172
