
SPECIFYING MULTIAGENT ENVIRONMENTS IN THE GAME
DESCRIPTION LANGUAGE
Stephan Schiffel and Michael Thielscher
Department of Computer Science, Dresden University of Technology, 01062 Dresden, Germany
Keywords:
Knowledge Representation, Multiagent Systems, Game Playing.
Abstract:
The Game Description Language (GDL) has been developed for the purpose of formalizing game rules. It
serves as the input language for general game players, which are systems that learn to play previously un-
known games without human intervention. In this paper, we show that GDL can be readily used as a spec-
ification language for a large class of multiagent environments. The resulting specifications are declarative,
compact, and easy to understand and maintain. At the same time they can be fully automatically understood
and used by autonomous agents who intend to participate in these environments. Our main result is a formal
characterization of the class of multiagent environments that can be described in GDL.
1 INTRODUCTION
A novel and challenging research problem for Artifi-
cial Intelligence, General Game Playing is concerned
with the development of systems that learn to play a
previously unknown game solely on the basis of the
rules. The Game Description Language (GDL) (Love
et al., 2006) has been developed to formalize the rules
of any finite, information-symmetric n-player game
in such a way that the description can be automati-
cally processed by a general game player (Genesereth
et al., 2006). As a declarative language, GDL sup-
ports specifications that are modular and easy to de-
velop, understand, and maintain. While the basic se-
mantics for GDL is grounded in standard logic, the
language uses several pre-defined predicates as key-
words, whose intended meaning is only informally
described in (Love et al., 2006).
In this paper, we show that GDL can be readily
used as a specification language for a large class of
multiagent environments. This allows for formalizing
the physics and laws that govern an arbitrary domain
in such a way that agents can automatically under-
stand the rules and thus know how to participate in
this environment. There is a variety of potential appli-
cations for machine processable descriptions of mul-
tiagent environments: the rules of an e-marketplace
can be made accessible to agents, the interface of in-
teractive Internet platforms for software agents can
be formally described, and agent competitions can be
run without revealing detailed problem specifications
in advance. In each of these cases, an autonomous
agent—or a team of agents—can learn how to partic-
ipate in a new or modified environment without the
need to be (re-)programmed for each specific case.
Because GDL uses a decidable subset of logic pro-
gramming, autonomous agents require just a simple,
standard reasoning module to be able to understand
and effectively process a given set of rules. Moreover,
if an agent environment is specified in GDL, success-
ful general game playing systems such as (Kuhlmann
et al., 2006; Clune, 2007; Schiffel and Thielscher,
2007; Finnsson and Bj¨ornsson, 2008) can be read-
ily employed as intelligent agents for these environ-
ments.
The main result in this paper is the definition of a
formal class of multiagent environmentswhich can be
expressed in GDL and, conversely, which can be used
to provide a semantics for any GDL game description.
As a by-product we thus obtain a formal semantics for
the special, pre-defined keywords in GDL.
The rest of the paper is organized as follows. In
Section 2, we formally define the class of determin-
istic, synchronous multiagent environments. In Sec-
tion 3, we show how these can be axiomatically de-
scribed in GDL, and in the section that follows, we
present the converse result by showing how all GDL
games can be interpreted as a deterministic, asyn-
chronous multiagent environment. We conclude in
Section 5.
21
Schiffel S. and Thielscher M. (2009).
SPECIFYING MULTIAGENT ENVIRONMENTS IN THE GAME DESCRIPTION LANGUAGE.
In Proceedings of the International Conference on Agents and Artificial Intelligence, pages 21-28
DOI: 10.5220/0001560200210028
Copyright
c
SciTePress
1
1
2
2
3
3
4
4
5
5
Ag
1
Ag
2
Ag
3
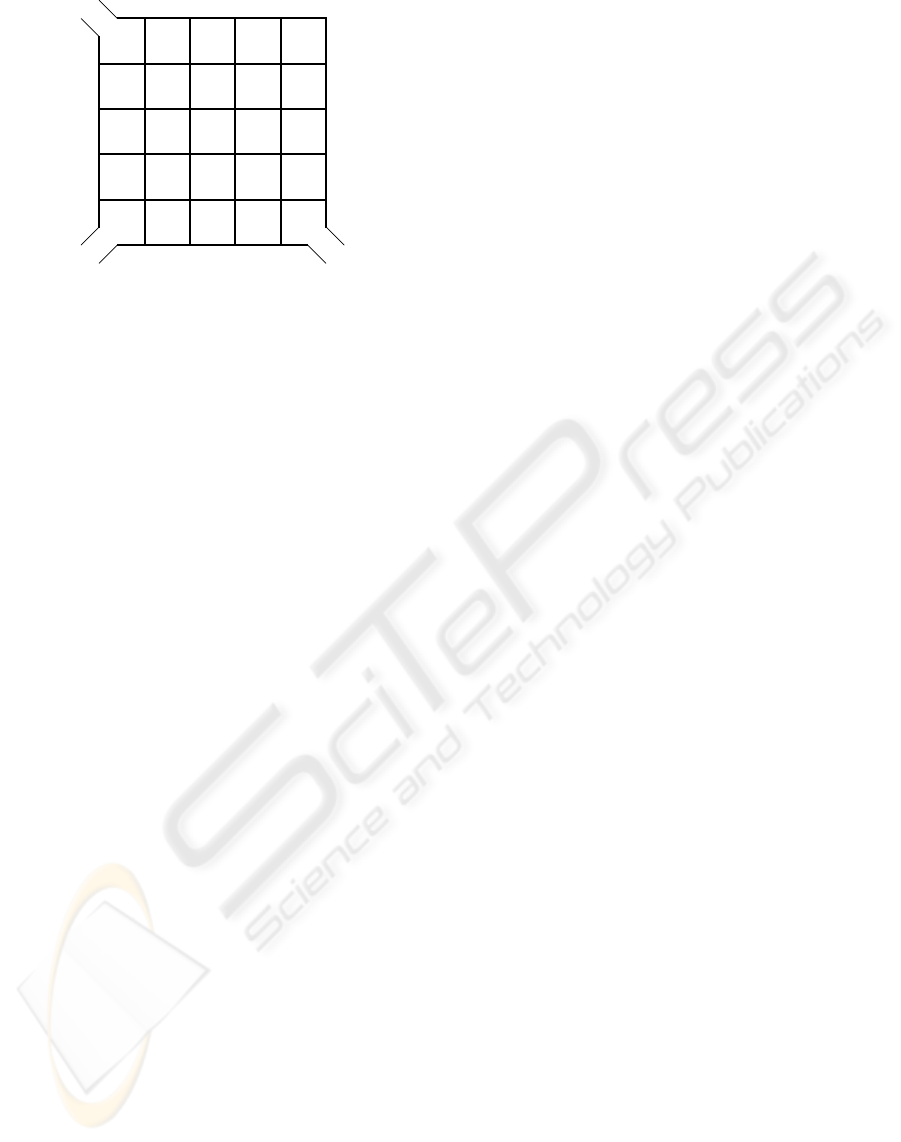
Figure 1: A simple multiagent domain: two “guard” agents
Ag
1
and Ag
2
shall cooperatively try to catch Ag
3
, whose
goal in turn is to escape via one of the three exits at lo-
cations (1,1), (5,1), and (1,5). All agents act syn-
chronously and can move horizontally or vertically to an
adjacent position. Ag
3
is caught when it ends up in the
same location as Ag
1
or Ag
2
, or when it crosses path with
one of them in a simultaneous move.
2 MULTIAGENT
ENVIRONMENTS
As the running examplein this paper, we will consider
the multiagent domain depicted in Figure 1. As a dis-
crete environment it can be formally described as a
finite state transition system. However, even though it
is obviously just a toy-size example, it has a consider-
ably large state space, rendering an explicit encoding
difficult—and practically impossible for even slightly
larger environments. Fortunately it is possible to ex-
ploit the fact that any natural and realistic multiagent
environment has an internal structure, which allows
one to describe its dynamics with the help of symbols
that represent individual components. Our example
domain, for instance, can be formally described using
the following symbolic expressions: Ag
1
,Ag
2
,Ag
3
,
representing the three agents; At(r,x, y), where r ∈
{Ag
1
,Ag
2
,Ag
3
} and x,y ∈ {1, . . . , 5}, representing
the position of each agent; and Move(d), where
d ∈ {North,South,East, West}, along with Stay and
Exit, representing the possible actions.
Based on a suitable collection of symbols, multia-
gent domains can be formally described as follows.
Definition 1 Let Σ be a countable set of ground
(i.e., variable-free) symbolic expressions. A (discrete,
synchronous, deterministic) multiagent environment
is a structure
(R,s
1
,t,l,u, g)
where
• R ⊆ Σ finite (the agents, or roles);
• s
1
⊆ Σ finite (the initial state);
• t ⊆ 2
Σ
(the terminal states);
• l ⊆ R×Σ×2
Σ
(the action preconditions, or legal-
ity relation);
• u : (R 7→ Σ)× 2
Σ
7→ 2
Σ
(the transition function, or
update function);
• g ⊆ R× N × 2
Σ
(the utility, or goal relation).
Here, 2
Σ
denotes the set of all finite subsets of Σ, and
for any r ∈ R and S ∈ 2
Σ
, l(r,a,S) holds for finitely
many a ∈ Σ.
This definition deserves some explanation. For the
sake of simplicity, the symbolic expressions are not
categorized—there is no formal distinction between
symbols for objects, state components, actions, etc.
For practical purposes, it is important that states are
finitely representable; hence, while possibly infinitely
many symbols give rise to infinitely many states, a
state itself is an element of the set of all finite subsets
of the given symbols. The legality relation l(r, a, S)
defines a to be a legal action for agent r in state S.
Again for the sake of practical usability, it is assumed
that every agent in every state has only finitely many
possible actions. The update function takes an ac-
tion for each agent and (synchronously) applies the
joint actions to a current state, resulting in the updated
state. For the sake of simplicity, we take natural num-
bers n ∈ N as the utility of a state S for agent r in
the goal relation g(r, n,S).
For illustration, consider a formalization of the
multiagent environment of Figure 1 using the sym-
bols introduced above.
• R = {Ag
1
,Ag
2
,Ag
3
};
• s
1
= {At(Ag
1
,1,1), At(Ag
2
,5,1), At(Ag
3
,5,5)} ;
• t contains all states
{At(Ag
1
,x
1
,y
1
),At(Ag
2
,x
2
,y
2
)}
(that is, where Ag
3
has escaped) along with all
states
{At(Ag
1
,x
1
,y
1
),At(Ag
2
,x
2
,y
2
),At(Ag
3
,x
3
,y
3
)}
in which x
1
= x
3
∧ y
1
= y
3
or x
2
= x
3
∧ y
2
= y
3
(that is, where Ag
3
has been caught);
• l is defined as follows: each agent can always
Stay; in every non-terminal state each agent can
Move(d) in any direction d unless this would
lead outside the physical environment; Ag
3
can
Exit from any of the locations (1,1), (5,1),
or (1, 5), provided it has not been caught.
• u is defined as follows: actions Stay, Exit, and
Move(d) have the expected effects on the indi-
vidual locations of the agents, with the exception
ICAART 2009 - International Conference on Agents and Artificial Intelligence
22

that when the paths of Ag
3
and either of Ag
1
or
Ag
2
(or both) cross in a simultaneous move, then
Ag
3
ends up (caught) in the same location as Ag
1
or Ag
2
, respectively. For illegal actions or states
that are not reachable, u may be arbitrarily de-
fined.
• g shall be defined as true for n = 100 and r =
Ag
3
in terminal states in which this agent has es-
caped; conversely, g holds for n = 100 and both
Ag
1
and Ag
2
in terminal states in which Ag
3
got
caught. In all other states the goal relation gives
value 0 for all three agents.
We have thus obtained a formal, symbolic descrip-
tion of the example multiagent environment. How-
ever, this specification is not yet amenable to auto-
matic processing by an autonomous agent, because it
uses natural language to describe some of the compo-
nents. If this were to be translated into an explicit enu-
meration of the transition function, this would again
yield too large a description to be of any practical use.
In the following section, we show how the Game De-
scription Language can be readily used to provide a
fully axiomatic, compact description of arbitrary mul-
tiagent environments; a description that on the one
hand is declarative and easy to understand and main-
tain by humans, and on the other hand can be fully au-
tomatically processed by artificial, autonomous agent
systems.
3 AXIOMATIZING MULTIAGENT
ENVIRONMENTS AS GAME
DESCRIPTIONS
The Game Description Language (GDL) has been
developed to formalize the rules of any finite game
with complete information in such a way that the de-
scription can be automatically processed by a general
game player. In this section, we first recapitulate the
GDL syntax from (Love et al., 2006) and then show
how the multiagent environments defined in the pre-
ceding section can be formally described in this lan-
guage.
3.1 General GDL Syntax
GDL is based on the standard syntax of logic pro-
grams, including negation. A logic program is a set
of clauses according to the following definition (see,
e.g., (Lloyd, 1987)).
Definition 2
• A term is either a variable, or a function sym-
bol applied to terms as arguments (a constant is
a function symbol with no argument);
• An atom is a predicate symbol applied to terms as
arguments;
• A literal is an atom or its negation;
• A clause is an implication h ⇐ b
1
∧.. . ∧b
n
where
head h is an atom and body b
1
∧ . . . ∧ b
n
a con-
junction of literals (n ≥ 0).
We adopt the Prolog convention according to which
variables are denoted by uppercase letters and predi-
cate and function symbols start with a lowercase let-
ter. (The interested reader may take a peek at Figure 2
at this point to see some example clauses, which in
fact constitute a complete GDL axiomatization of our
running example domain.) GDL imposes some gen-
eral restrictions on a set of clauses, with the intention
to ensure finite derivability.
Definition 3 The dependency graph for a set G
of clauses is a directed, labeled graph whose nodes
are the predicate symbols that occur in G and where
there is a positive edge p
+
→
q if G contains a clause
p(~s) ⇐ ... ∧ q(
~
t ) ∧ ..., and a negative edge p
−
→
q if
G contains a clause p(~s) ⇐ .. . ∧ ¬q(
~
t ) ∧ . . . .
To constitute a valid GDL specification, a set of
clauses G and its dependency graph Γ must satisfy
the following.
1. There are no cycles involvinga negativeedge in Γ
(this is also known as being stratified (Apt et al.,
1987; van Gelder, 1989));
2. Each variable in a clause occurs in at least one
positive atom in the body (this is also known as
being allowed (Lloyd and Topor, 1986));
3. If p and q occur in a cycle in Γ and G contains
a clause
p(~s) ⇐ b
1
(
~
t
1
) ∧ . . . ∧ q(v
1
,... , v
k
) ∧ . . . ∧ b
n
(
~
t
n
)
then for every i ∈ {1, . . . , k},
• v
i
is variable-free, or
• v
i
is one of s
1
,... , s
m
(:=~s), or
• v
i
occurs in some
~
t
j
(1 ≤ j ≤ n) such that b
j
does not occur in a cycle with p in Γ.
Stratified logic programs are known to admit a
specific standard model; we refer to (Apt et al., 1987)
for details and just mention the following properties:
1. To obtain the standard model, clauses with vari-
ables are replaced by their (possibly infinitely
many) ground instances.
SPECIFYING MULTIAGENT ENVIRONMENTS IN THE GAME DESCRIPTION LANGUAGE
23
Table 1: GDL keywords.
role(R) R is a player
init(P) P holds in the initial position
true(P) P holds in the current position
legal(R,M) player R has legal move M
does(R, M) player R does move M
next(P) P holds in the next position
terminal the current position is terminal
goal(R, N) player R gets goal value N in the current position
2. Clauses are interpreted as reverse implications.
3. The standard model is minimal while interpret-
ing negation as non-derivability (the “negation-as-
failure” principle (Clark, 1978));
The second and third restriction in Definition 3 essen-
tially guarantee that a logic program entails a finite
number of ground atoms via its standard model. This
is necessary to enable agents to make effective use of
a set of game rules.
3.2 GDL Keywords
As a tailor-made specification language, GDL uses a
few pre-defined predicate symbols. These are shown
in Table 1 together with their informal meaning. A
further, standard predicate is distinct(X, Y) to ex-
press (syntactic) inequality of two terms.
1
GDL imposes additional restrictions on the use of
these keywords.
Definition 4 A valid GDL specification is a set of
clauses G that, in addition to the restrictions in Defi-
nition 3, satisfies the following conditions.
• role only appears in the head of clauses that
have an empty body;
• init only appears as head of clauses and is not
connected, in the dependency graph for G, to any
of true,legal,does,,,goal;
• true only appears in the body of clauses;
• does only appears in the body of clauses and is
not connected, in the dependency graph for G, to
any of legal,terminal,goal;
• nly appears as head of clauses.
1
The semantics of this predicate is given by tacitly as-
suming the addition of the clause
distinct(s,t) ⇐
for every pair s,t of syntactically different ground terms.
According to the informal semantics given in (Love
et al., 2006), a GDL specification G is to be under-
stood as follows. The derivable instances of role(R)
define the players. The initial state is composed of
the derivable instances of init(P). In order to deter-
mine the legal moves of a player in any given state,
this state has to be encoded first, using the keyword
true. More precisely, let S = {p
1
,... , p
n
} be a state
(e.g., the derivable instances of init(P) at the be-
ginning), then G is extended by the clauses
true(p
1
) ⇐
...
true(p
n
) ⇐
(1)
Those instances of legal(R, A) which are derivable
from this extended program define all legal actions A
for player R in state S. In the same way, the clauses
for terminal and goal(R,N) define termination
and goalhood (of value N for player R) relative to the
encoding of a given state. Determining a state transi-
tion, finally, requires the encoding of the current state
along with clauses representing a joint move. Specif-
ically, if players r
1
,... , r
n
make moves a
1
,... , a
n
,
then
does(r
1
,a
1
) ⇐
...
does(r
n
,a
n
) ⇐
(2)
must be added to G, and then the derivable instances
of next(P) compose the updated state.
3.3 Multiagent Environments in GDL
GDL provides all necessary features for declarative,
formal descriptions of arbitrary multiagent environ-
ments as defined in Section 2. Of course there are
many possible ways in which any specific environ-
ment can be axiomatized. We therefore define two
sets of GDL clauses as logically equivalent if for any
finite set of ground clauses (1) and (2) added, the two
standard models of the two resulting logic programs
agree on the interpretation of all GDL keywords. Be-
fore we can show how to formalize multiagent en-
vironments in GDL, we need the following syntactic
definitions.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
24

For any finite subset S = {p
1
,... , p
n
} ⊆ Σ of a set
of ground terms, the following conjunction axioma-
tizes S as the current state:
S
true
def
= true(p
1
) ∧ . . . ∧ true(p
n
) ∧ ¬p
S
(3)
Here, p
S
is an auxiliary predicate, one for every fi-
nite S ⊆ Σ, whose purpose is to ensure that the con-
junction does not hold for states that are strict super-
sets of S:
p
S
⇐ true(X)∧
distinct(X, p
1
) ∧ . . . ∧ distinct(X, p
n
)
Hence, p
S
is true for any state in which at least one
state component X is true that differs syntactically
from any of p
1
,... , p
n
, that is, the elements of S.
This ensures that the conjunction defined in (3) char-
acterizes state S exactly.
Furthermore, for any function A : {r
1
,... , r
n
} 7→
Σ, where r
1
,... , r
n
∈ Σ, the following conjunction ax-
iomatizes A as a joint action:
A
does
def
= does(r
1
,A(r
1
)) ∧ . . . ∧ does(r
n
,A(r
n
))
We are now ready to show how GDL can be used
to axiomatize multiagent domains.
Definition 5 Let E = (R,s
1
,t, l, u, g) be a multi-
agent environment based on ground symbolic expres-
sions Σ, then any valid set of GDL clauses is an ax-
iomatic description of E if it is logically equivalent
to the following.
• role(r) ⇐ for each r ∈ R;
• init(p) ⇐ for each p ∈ s
1
;
• terminal ⇐ S
true
for each S ∈ t;
• legal(r, a) ⇐ S
true
for each (r, a, S) ∈ l;
• () ⇐ A
does
∧ S
true
for each p ∈ u(A, S) and A :
R 7→ Σ, S ⊆ Σ;
• goal(r,n) ⇐ S
true
for each (r, n, S) ∈ g.
It is important to realize that this direct axiomatiza-
tion, where all relations and functions are encoded
explicitly, is used solely to define the intended se-
mantics. In practice, of course, a domain can be
described in a much more compact manner, using
variables, logical equivalence, and possibly auxiliary
predicates. As an example, Figure 2 depicts a com-
plete GDL specification of the multiagent environ-
ment introduced in Section 2. It is not too difficult
to verify that this is a valid set of clauses according to
Definition 3 and 4 and that it is indeed a correct ax-
iomatic description of this domain according to Defi-
nition 5.
The specification of the Game Description Lan-
guage in (Love et al., 2006) lacks a fully formal defi-
nition of the intended meaning of a specification. This
is why there are no formal grounds on which it could
actually be proved that Definition 5 yields a correct
description of a multiagent environment. In fact, we
can and will use our formal concept of a multiagent
domain to provide just this precise semantics for GDL
in terms of a transition system.
4 A MULTIAGENT SEMANTICS
FOR GDL
In the preceding section, we have shown how GDL
provides a declarative, compact language to formally
describe a large class of multiagent environments in
a machine processable fashion. In this section, we
show how the abstract model of a multiagent environ-
ment can in turn be used to provide a formal semantics
for GDL in terms of a transition system. In this way
we make precise what is only informally described
in (Love et al., 2006).
Any valid game description G in GDL contains
a finite set of function symbols, including constants,
which implicitly determines a (usually infinite) set of
ground terms. This set constitutes the symbol base Σ
in the transition-based semantics for G. The syntactic
restrictions in GDL ensure finite derivability, so that
each state, the set of roles, etc. are all finite subsets
of Σ. The following definition of the semantics of
a GDL description is straightforwardly obtained by
reversing the mapping from a multiagent environment
into GDL (cf. Definition 5).
Definition 6 Let G be a valid GDL specifica-
tion, whose signature determines the set of ground
terms Σ. The semantics of G is the multiagent envi-
ronment (R,s
1
,t, l, u, g) where
2
• R = {r ∈ Σ : G |= role(r)};
• s
1
= {p ∈ Σ : G |= init(p)};
• t = {S ∈ 2
Σ
: G∪ S
true
|= terminal};
• l = {(r,a, S) : G∪ S
true
|= legal(r, a, S)}, where
r ∈ R, a ∈ Σ, and S ∈ 2
Σ
;
• u(A, S) = {p ∈ Σ : G∪ A
does
∪ S
true
|= ()}, for all
A : (R 7→ Σ) and S ∈ 2
Σ
;
• g = {(r, n, S) : G ∪ S
true
|= goal(r, n, S)}, where
r ∈ R, n ∈ N , and S ∈ 2
Σ
.
This definition provides a formal semantics for GDL
in terms of abstract multiagent environments. Finite
derivability in valid GDL specifications implies that
2
Below, entailment (|=) is via the standard model of a
set of clauses.
SPECIFYING MULTIAGENT ENVIRONMENTS IN THE GAME DESCRIPTION LANGUAGE
25

role(ag
1
) ⇐
role(ag
2
) ⇐
role(ag
3
) ⇐
init(at(ag
1
,1, 1)) ⇐
init(at(ag
2
,5, 1)) ⇐
init(at(ag
3
,1, 5)) ⇐
terminal ⇐ true(at(ag
1
,X,Y)) ∧ true(at(ag
3
,X,Y))
terminal ⇐ true(at(ag
2
,X,Y)) ∧ true(at(ag
3
,X,Y))
terminal ⇐ ¬remain
remain ⇐ true(at(ag
3
,X,Y))
legal(R,stay) ⇐ true(at(R,X, Y))
legal(ag
3
,exit) ⇐ ¬terminal ∧ true(at(ag
3
,1, 1))
legal(ag
3
,exit) ⇐ ¬terminal ∧ true(at(ag
3
,5, 1))
legal(ag
3
,exit) ⇐ ¬terminal ∧ true(at(ag
3
,1, 5))
legal(R,move(D)) ⇐ ¬terminal ∧ true(at(R,U, V)) ∧ adjacent(U,V,D, X, Y)
adjacent(X, Y
1
,north, X, Y
2
) ⇐ co(X) ∧ succ(Y
1
,Y
2
)
adjacent(X, Y
1
,south, X, Y
2
) ⇐ co(X) ∧ succ(Y
2
,Y
1
)
adjacent(X
1
,Y, east,X
2
,Y) ⇐ co(Y) ∧ succ(X
1
,X
2
)
adjacent(X
1
,Y, west,X
2
,Y) ⇐ co(Y) ∧ succ(X
2
,X
1
)
co(1) ⇐ co(2) ⇐ co(3) ⇐ co(4) ⇐ co(5) ⇐
succ(1,2) ⇐ succ(2,3) ⇐ succ(3,4) ⇐ succ(4,5) ⇐
next(at(R,X, Y)) ⇐ does(R,stay) ∧ true(at(R,X,Y))
next(at(R,X, Y)) ⇐ does(R,move(D)) ∧ true(at(R, U, V)) ∧ adjacent(U,V,D, X, Y) ∧ ¬capture(R)
next(at(ag
3
,X, Y)) ⇐ true(at(ag
3
,X, Y)) ∧ capture(ag
3
)
capture(ag
3
) ⇐ true(at(ag
3
,X, Y)) ∧ true(at(R,U, V)) ∧ does(ag
3
,move(D
1
))∧
does(R,move(D
2
)) ∧ adjacent(X,Y,D
1
,U, V) ∧ adjacent(U,V,D
2
,X, Y)
goal(R,0) ⇐ role(R) ∧ ¬terminal
goal(R,0) ⇐ role(R) ∧ distinct(R,ag
3
) ∧ terminal ∧ ¬remain
goal(R,100) ⇐ role(R) ∧ distinct(R,ag
3
) ∧ terminal ∧ true(at(ag
3
,X, Y))
goal(ag
3
,0) ⇐ terminal ∧ true(at(ag
3
,X, Y))
goal(ag
3
,100) ⇐ terminal ∧ ¬remain
Figure 2: A complete, formal description of the multiagent environment of Figure 1.
the entailment relation is decidable, which in turn en-
sures that the definition of the semantics is effective.
In the preceding section we have seen that one
and the same multiagent environmentcan be axiomat-
ically described in many differentways. With the help
of Definition 6 it is now easy to verify that two logi-
cally equivalent GDL descriptions (as defined in Sec-
tion 3.3) describe exactly the same environment.
Proposition 7 The semantics of two logically equiv-
alent, valid GDL descriptions coincide.
Proof: By definition, two logically equivalent GDL
descriptions agree on the interpretation of all GDL
keywords for all finite additions of clauses (1) and (2).
It is easy to see, then, that the various components
of their semantics according to Definition 6 must be
identical.
Based on this result it is also straightforward to
prove that Definition 6 indeed provides the comple-
ment to the encoding of a multiagent environment in
GDL.
Proposition 8 Let E be a multiagent environment
and G any axiomatic description thereof, then the se-
mantics of G is E.
Proof: Consider the generic encoding of E given
in Definition 5. It is easy to verify that the standard
model for this set of clauses, augmented by any fi-
nite set of facts about relations true and does (cf.
clauses (1) and (2), respectively, in Section 3.2), de-
termines a semantics (R, s
1
,t, l, u, g) via Definition 6
which equals E . The claim follows from Proposi-
tion 7 and the fact that any GDL encoding for E is
logically equivalent to the generic clauses given in
Definition 5.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
26

5 DISCUSSION
We have shown how the Game Description Language,
developed in the context of General Game Playing,
can be readily used as a declarative language to pro-
vide compact and machine processable specifications
of a large class of multiagent environments. This can
be applied to formalize the rules, for example, of an
e-marketplace, of publicly accessible agent platforms
on the Internet, of problem domains used in agent
competitions, etc. By automatically processing these
specifications, autonomous agents can fully automat-
ically learn how to participate in a new or modified
environment without the need to be (re-)programmed.
Moreover, successful off-the-shelf generalgame play-
ing systems can be readily employed as intelligent
agents for these environments.
It is interesting to note that GDL has been orig-
inally developed as problem specification language
for a competition (Genesereth et al., 2006), much
like the Planning Domain Description Language
(PDDL) (McDermott, 2000), which today is a quasi
standard for the specification of planning domains.
GDL can be viewed as a generalization of PDDL to
domains with multiple agents, because solving a plan-
ning problem can be understood as playing a single-
player game. Indeed, most features of current ver-
sions of PDDL can be expressed in GDL, though
with one notable exception: sensing actions are not
included in the current version of GDL. Although
a GDL specification leaves agents with uncertainty
about how the world evolves (an agent can decide on
its own actions but not on those of all other agents),
the language has been written for games without in-
formation asymmetry. An important research issue
for the near future is to extend the Game Description
Language so as to support descriptions of games with
asymmetric information and sensing actions, which
is a typical feature of card games, for instance. This
would then provide a suitable formalization language
for an even larger class of multiagent environments
than considered in this paper.
In the second part of the paper, we have used the
concept of a multiagent environment to provide a for-
mal, transition-based semantics for GDL. With this
we have made precise what is only informally de-
scribed in (Love et al., 2006). Our semantics for GDL
in terms of multiagent environments is related to an
existing formal characterization of GDL by a game
structure (van der Hoek et al., 2007). The main dif-
ference of the latter in comparison to our work are:
• It is restricted to propositional GDL;
• It puts further restrictions on GDL, such as not
allowing predicate init to occur in clause with
non-empty bodies;
• It uses an inductive definition of the set of all
states in order to obtain only those which are
reachable from the initial state. Since it is pos-
sible to give valid GDL specifications of games
that do not terminate, this definition would be un-
decidable in the general setting.
3
These restrictions have been imposed because the fo-
cus in (van der Hoek et al., 2007) lies on the use of
Temporal Logic for the purpose of verifying proper-
ties of games, such as termination or winnability. In
contrast to this, the semantics given in the present pa-
per covers full GDL.
ACKNOWLEDGEMENTS
We are grateful to the anonymous reviewers of this
paper for helpful suggestions. This research was par-
tially supported by Deutsche Forschungsgemeinschaft
under Contract TH 541/16-1.
REFERENCES
Apt, K., Blair, H. A., and Walker, A. (1987). Towards a
theory of declarative knowledge. In Minker, J., editor,
Foundations of Deductive Databases and Logic Pro-
gramming, chapter 2, pages 89–148. Morgan Kauf-
mann.
Clark, K. (1978). Negation as failure. In Gallaire, H. and
Minker, J., editors, Logic and Data Bases, pages 293–
322. Plenum Press.
Clune, J. (2007). Heuristic evaluation functions for general
game playing. In Proceedings of the AAAI National
Conference on Artificial Intelligence, pages 1134–
1139, Vancouver. AAAI Press.
Finnsson, H. and Bj¨ornsson, Y. (2008). Simulation-based
approach to general game playing. In Proceedings
of the AAAI National Conference on Artificial Intel-
ligence, pages 259–264, Chicago. AAAI Press.
3
It is worth noting that this does not contradict the finite
derivability property of valid GDL specifications, which
just implies that all local reasoning problems are decidable.
More specifically, given a particular state it is decidable
whether an action is possible, and given a joint action it
is also decidable what properties hold in the updated state,
etc. On the other hand, GDL is expressive enough to de-
scribe any Turing machine as a “game” using clauses like
init(head(0)) ⇐
next(head(succ(X))) ⇐ true(head(X)) ∧
does(tm,move forward)
Hence, reachability of states is generally undecidable in
GDL.
SPECIFYING MULTIAGENT ENVIRONMENTS IN THE GAME DESCRIPTION LANGUAGE
27

Genesereth, M., Love, N., and Pell, B. (2006). General
game playing. AI Magazine, 26(2):73–84.
Kuhlmann, G., Dresner, K., and Stone, P. (2006). Au-
tomatic heuristic construction in a complete general
game player. In Proceedings of the AAAI National
Conference on Artificial Intelligence, pages 1457–
1462, Boston. AAAI Press.
Lloyd, J. (1987). Foundations of Logic Programming.
Series Symbolic Computation. Springer, second, ex-
tended edition.
Lloyd, J. and Topor, R. (1986). A basis for deductive
database systems II. Journal of Logic Programming,
3(1):55–67.
Love, N., Hinrichs, T., Haley, D., Schkufza, E., and
Genesereth, M. (2006). General Game Playing:
Game Description Language Specification. Tech-
nical Report LG–2006–01, Stanford Logic Group,
Computer Science Department, Stanford University,
353 Serra Mall, Stanford, CA 94305. Available at:
games.stanford.edu
.
McDermott, D. (2000). The 1998 AI planning systems com-
petition. AI Magazine, 21(2):35–55.
Schiffel, S. and Thielscher, M. (2007). Fluxplayer: A suc-
cessful general game player. In Proceedings of the
AAAI National Conference on Artificial Intelligence,
pages 1191–1196, Vancouver. AAAI Press.
van der Hoek, W., Ruan, J., and Wooldridge, M. (2007).
Strategy logics and the game description language. In
Proceedings of the Workshop on Logic, Rationality
and Interaction, Bejing, China.
van Gelder, A. (1989). The Alternating Fixpoint of Logic
Programs with Negation. In Proceedings of the 8th
Symposium on Principles of Database Systems, pages
1–10. ACM SIGACT-SIGMOD.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
28
