
SKY DETECTION IN CSC-SEGMENTED COLOR IMAGES
Frank Schmitt and Lutz Priese
University of Koblenz-Landau
∗
, Koblenz, Germany
Keywords:
Sky detection, CSC.
Abstract:
We present a novel algorithm for detection of sky areas in outdoor color images. In contrast to sky detectors
in literature that detect only blue, cloudless sky we intend to detect all sorts of sky, i.e. blue, clouded and
partially clouded sky. Our approach is based on the analysis of color, position, and shape properties of color
homogeneous spatially connected regions detected by the CSC. An evaluation on a set of images acquired
under different weather conditions proves the quality of the proposed system.
1 INTRODUCTION
For many applications in image processing accurate
and fast detection of the sky is helpful. After the
sky has been detected we can conclude on the content
of the image and extract information about weather
and illumination conditions during image acquisition.
Knowledge about the sky also often helps to constrain
the search domain for later, more complicated image
recognition algorithms.
In images of urban regions the lower border of sky
areas often equals the top border of buildings. Those
borders can give first clues for pose estimation, i.e.
the detection of position and orientation of the cam-
era relative to the building. For this task it is important
to find the sky reliable under all weather conditions,
i.e., cloudless, partially clouded or overclouded. On
the other hand, it is not important to find smaller iso-
lated sky areas below such borders, e.g. under arch-
ways. The sky detection system introduced here is
optimized for such an application scenario.
In the first steps of the algorithm, the input im-
age is smoothed and segmented by the CSC, a re-
gion growing segmentation method introduced by
Rehrmann and Priese (Rehrmann and Priese, 1998).
The CSC partitions the image into spatially con-
nected, color homogeneous regions, called segments.
Each segment is analyzed individually regarding its
mean color and a sky probability is attached. In a fi-
∗
This work was supported by the DFG under grant
PR161/12-1 and PA 599/7-1
nal step spatial information typical for urban scenes
is added to the probability map and all segments are
classified into sky and non-sky.
2 RELATED AND PREVIOUS
WORK
Previous work on sky detection by other groups has
the goal to detect the pure blue sky, thus, the image of
the atmosphere. Clouds are by this definition explic-
itly not part of the sky and therefore not to be detected.
Luo and Etz (Luo and Etz, 2002) state that the
color of the sky changes gradually from a dark blue
in the zenith to a bright, sometimes almost white, blue
near the horizon. They model the values in three color
channels along straight lines from zenith to horizon
as three one-dimensional functions and analyze these
functions with regard to characteristic properties of
the sky.
Gallagher et. al (Gallagher et al., 2004) first gen-
erate an initial sky probability map based on classifi-
cation of color values. In a second stage they model
the spatial variation of pixels initially classified as
sky. They calculate for each color channel a two-
dimensional polynomial that approximates the values
of pixels with high sky probability. By comparison
between values of pixels in the images and the corre-
sponding values of the polynomial the final sky clas-
sification is generated.
Zafarifar and de With (Zafarifar and de With,
101
Schmitt F. and Priese L. (2009).
SKY DETECTION IN CSC-SEGMENTED COLOR IMAGES.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 101-106
DOI: 10.5220/0001560601010106
Copyright
c
SciTePress

2006) use sky detection in the context of image qual-
ity enhancement in video data. Their system gen-
erates a sky probability map based on texture, color
values, gradients, and vertical position in the image.
They achieve very good results, however, they only
detect blue sky and therefore their system gives low
sky probability in clouds.
However, in many parts of the world clouded sky
is very common. Thus, systems which restrict them-
selves to blue sky detection are restricted in practica-
bility. Our new system detects the total sky under all
weather conditions.
First ideas of the presented approach – not includ-
ing the following major improvements based on the
analysis of segment’s shape and gradients – have been
presented in the German workshop “Farbworkshop
2008” (Schmitt and Priese, 2008).
3 CHARACTERISTICS OF SKY
In systems for the detection of a cloudless sky one
may assume that the sky is free of large gradients but
shows a continuous brightness gradient. As we regard
clouds as part of the sky we can not make such an
assumption. Our sky detector is thus based on differ-
ent assumptions and observations of characteristics of
the sky in color images in urban regions. We assume
that the images to be analyzed have been acquired ho-
rizontally so that the sky is at the top of the image.
Where this assumption does not apply one may em-
ploy algorithms for horizon estimation as introduced
in (Ettinger et al., 2002) or (Fefilatyev et al., 2006).
Beside the position in the image, the color is the
second characteristic property of the sky. The color
can range from a pure white over different kinds of
gray inside clouds to shades of blue of different satu-
ration and brightness in cloudless regions. We further
assume, that all segments belonging to the sky have a
vertical connection to the upper border of the image,
either directly or through other segments recognized
as sky.
If one chooses, e.g., split-and-merge (Horowitz
and Pavlidis, 1974) (SaM) as a segmentation tech-
nique and the sky disintegrates into several seg-
ments the borders between those segments show large
straight lines. Those reflect the underlying quad-tree
structure of the SaM algorithm. This will not hap-
pen with the CSC segmentation technique. The bor-
ders of two segments of the sky almost always show
an irregular contour without straight lines. However,
the border between sky and buildings is usually build
from straight lines. This leads to further classification
criteria.
4 THE ALGORITHM
4.1 Basic Concepts
Our algorithm is directly motivated by the observa-
tions of the previous paragraph.
In a first step we smooth the image and segment it
into spatially connected, color homogeneous regions.
In the next step we start at the top border of the image
and search for segments whose mean color is suitable
for sky.
However, an analysis of mean color and position
is insufficient. Such a straight forward method also
classifies white, gray, and blue objects outside the sky
- but immediately below the horizon - as sky. To re-
duce the number of those false-positive classifications
we have to add another step where the shape of possi-
ble sky segments is analyzed.
4.2 Pre-processing and Segmentation
The input image is first smoothed with one iteration of
a 3×3 Kuwahara-filter(M. Kuwahara, K. Hachimura,
S. Eiho, and M. Kinoshita, 1976). This non-linear
filter sharpens borders and simultaneously smooths
within homogeneous regions. The filtered image is
segmented into spatially connected, color homoge-
neous regions with the CSC.
The CSC is a region growing segmentation
method steered by a hierarchy of overlapping is-
lands. If two overlapping partial segments are simi-
lar enough they are merged into a new segment. Else
the common sub-region is split between them. As the
decision whether to split or to merge two regions is
not only based on a common border but a common
sub-region, the results are more stable than in con-
ventional region growing methods. The structure of
the island hierarchy makes the CSC inherently paral-
lel. Also, there is no need for spreading seed points
in the image whose position influences the outcome
of the segmentation in conventional region growing
methods.
It is important to choose the parameters of the
CSC such that an over-segmentation (areas belonging
together are split into several segments) is more likely
than an under-segmentation (areas not belonging to-
gether are merged into one segment) as an additional
classification of the found segments has to been done
anyway.
The CSC segmentation can be applied either in
HSV color space based on color similarity tables
(Rehrmann, 1994) or in L*a*b* color space where
similarity between two shades of color is calculated
using the Euclidean distance. For the experiments in
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
102

this paper we have chosen the L*a*b* color space
with a threshold of 12. The result of the CSC is a
label image where the value at every pixel is set to the
label of the segment it belongs to.
4.3 Characteristics of Segments
Let a segment S be represented as a set of spatially
connected pixels. The upper border b
u
(S) consists of
all coordinates (x, y) such that the pixel at (x, y) is in-
side S and the pixel at (x, i) is outside S for all i ∈ N
with i < y. (As customary in computer vision, we use
positivecoordinates(x, y) where (0, 0) denotes the left
upper corner of the image.)
The color of S is the mean color of all pixels be-
longing to S. As segments are color homogeneous,
the problem that averaging may create false colors
does not occur.
The mean vertical gradient of S is a measure de-
scribing the brightness gradient at the common border
between S and its upper neighbor segments. It is cal-
culated as the average brightness difference between
pixels at b
u
(S) and their direct upper neighbor pixels.
If no upper neighbors exist the mean vertical gradient
is set to 0. A low mean vertical gradient is a strong
clue for a segment border generated during splitting
of a color gradient into several segments. Such bor-
ders are normally more or less arbitrary and typical
for a segmentation within the sky.
The mean bounded second derivative of b
u
(S) is a
measure which describes whether the top border of S
is build of straight lines or rather formed irregularly.
It is calculated as follows:
Let x
min
be the x-coordinate of the leftmost and
x
max
of the rightmost pixel in S. For each i ∈ N
in [x
min
, x
max
] exists exactly one coordinate with x-
component i in b
u
(S). We can therefore regard b
u
(S)
as a function of x where b
u
(S, x) := y if (x, y) ∈ b
u
(S)
and undefined else. The function
δ
2
(S, x) := b
u
(S, x − 1) − 2· b
u
(S, x) + b
u
(S, x + 1)
is the discrete second derivative of b
u
for segment S
at position x.
|δ
2
(S, x)| is low at straight border segments and
high at irregularly formed areas. Thus, an obvious ap-
proach would be to average |δ
2
(S, x)| over the width
of S in order to get a measure for the straightness
of S. However, this approach leads to the prob-
lem that within a polygon, that consists of few con-
nected straight lines, the corner points may contribute
too high values. We therefore use bounded values
as follows: Let m(S, x) := 1 for |δ
2
(S, x)| ≥ 1 and
m(S, x) := 0 elsewhere. The mean bounded second
derivative of the top border of S is calculated as
∑
(x,y)∈b
u
(S)
m(S, x)
∑
(x,y)∈b
u
(S)
1
4.4 Color Analysis
A classification of segments as sky solely by their
color is obviously impossible. There are usually sev-
eral objects (or reflections) in an image that do not
belong to the sky but have a color which could also
occur in the sky. Thus, in this phase we only deter-
mine whether the mean color of a segment may occur
also in the sky. For such a task it will not help to
train a classifier with many examples of sky and non-
sky segments. The result will not be disjunctive as all
colors which can occur in the sky can occur in other
image regions as well. Instead, we were able to deter-
mine by manual analysis of sample images a simple
and rather compact subspace of the HSV color space
which includes all colors occurring in sky.
Our experiments have shown that it suffices to call
a HSV value hsv sky colored if it meets at least one of
the following conditions:
• hsv.saturation < 13 and hsv.value > 216
• hsv.saturation < 25 and hsv.value > 204 and
hsv.hue > 190 and hsv.hue < 250
• hsv.saturation < 128 and hsv.value > 153 and
hsv.hue > 200 and hsv.hue < 230
• hsv.value > 88 and hsv.hue > 210 and hsv.hue <
220
The listed hue values are to some degree dependent
on the cameras used.
4.5 Analysis of Position and Shape
Let L
s
and L
c
be two (initially empty) lists of seg-
ments already classified as sky (L
s
) or as candidates
(L
c
) for sky. Segments whose mean color is sky col-
ored and for which the condition holds that at least
half of their top border touches the top border of the
image are added to L
s
. All segments touching the
lower border of at least one of the segments in L
s
are
added to a L
c
. For each segment S in L
c
we check
three criteria:
1. the color of S is sky colored,
2. at least two thirds of the top border of S touches
either the top border of the image or segments in
L
s
,
3. at least one of the following conditions is satisfied:
(a) the area of S contains less than 500 pixel (we
skip shape analysis for such small segments)
SKY DETECTION IN CSC-SEGMENTED COLOR IMAGES
103
(b) the mean vertical gradient of S is below 25
(c) the mean bounded second derivative of b
u
(S) is
bigger than 0.3.
If all three conditions are satisfied S is classified
as sky and the lists L
s
, L
c
are updated. Otherwise, S is
removed from L
c
. The algorithm terminates when the
candidate list is empty.
At this stage, all segments which belong to sky
and have a connection to the top border of the image
(either a direct connection or through other sky seg-
ments) should have been classified as sky. However,
in rare cases it may occur that, e.g., a cloud matches
conditions 1 and 2 but not condition 3 and, thus, has
been falsely classified as non-sky. Such cases are de-
tected and fixed in a post-processing step where all
non-sky segments which satisfy conditions 1 and 2
and which are completely surrounded by sky are clas-
sified as sky as well.
5 EVALUATION
For an evaluation 179 images of the campus of our
university have been acquired under different weather
conditions. Some examples are shown in appendix A.
To get a ground truth (GT) we have manually anno-
tated the sky to copies of those images. Our evalua-
tion compares the detected sky with this ground truth
sky with two measures: The coverability rate (CR)
measures how much of the true sky is detected by the
algorithm. The error rate (ER) measures how much
of the area detected as sky is not part of the true sky.
Let S denote the detected sky and GT the ground truth
sky. Then both measures are defined as
CR(S, GT) :=
|S∩ GT|
|GT|
, ER(S, GT) :=
|S− GT|
|S|
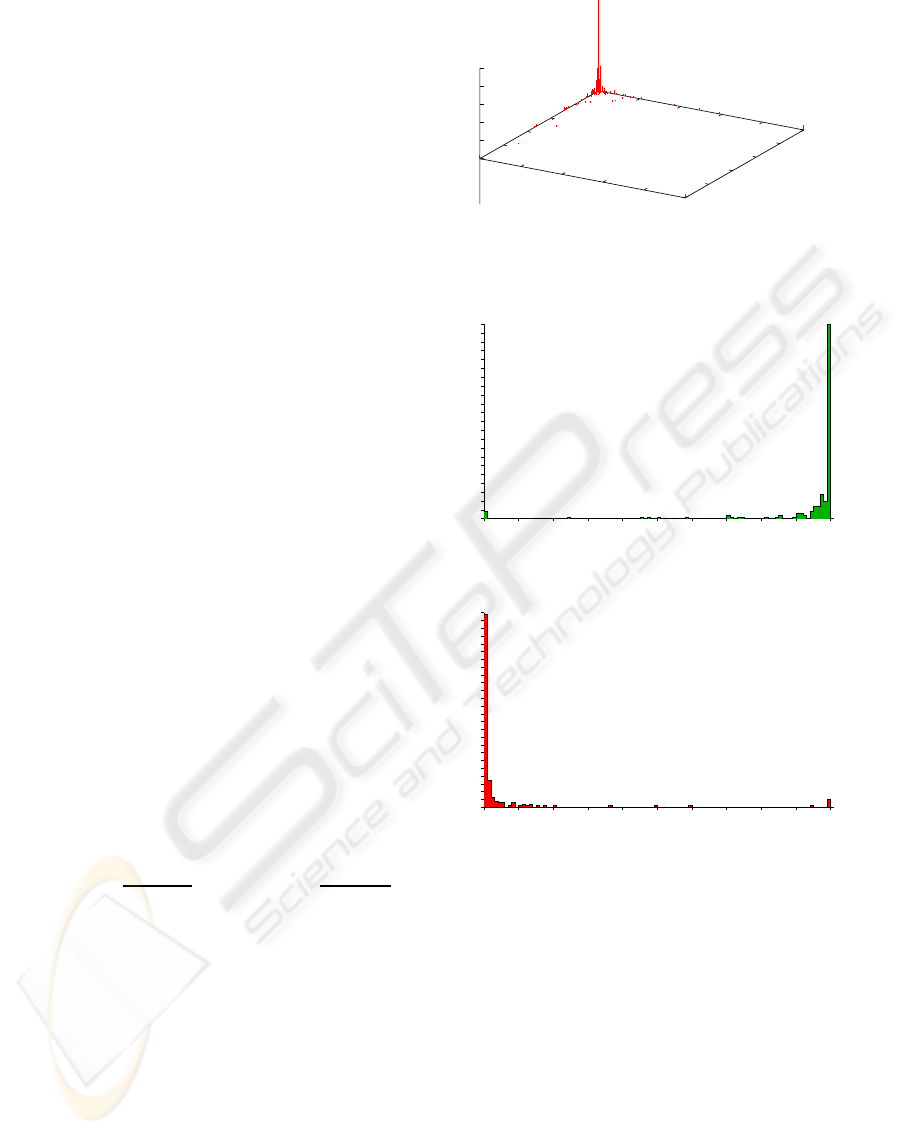
Graphic 1 visualizes our evaluation results. On
the x-axis the error rates are shown, on the y-axis the
coverability rates. The length of a line in z-direction
at position (x,y) tells in how many cases error rate x
and coverabiliy rate y was achieved. Graphics 2 and 3
show the distributions of CR and ER alone.
In 80% of all images, CR is above 0.9 and ER is
below 0.1. In 75% of all images, CR is above 0.95
and ER is below 0.05. Those results clearly show the
quality of the proposed algorithm. The cases where
the error rate is very high correspond in the majority
of cases to images that do not contain any sky at all.
As soon as our algorithm classifies at least one pixel
as sky in those images the error rate becomes 1.0.
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
0
10
20
30
40
50
Quantity
ER
CR
Quantity
Figure 1: Distribution of CR and ER.
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
5
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
85
90
95
100
105
110
Figure 2: Distribution of CR.
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
5
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
125
Figure 3: Distribution of ER.
6 SUMMARY AND OUTLOOK
We have presented a fast and robust system for
detection of sky in camera images. In contrast to
known systems, our algorithm is able to not only
detect blue but also clouded sky. The presented
algorithm is fast and an quantitative evaluation on a
set of 179 images shows its robustness.
We intend to further improve our sky detector and
will try to automatically detect and split segments
which include both sky and non-sky, see Figure 7 as
an example. Also the detection of images in urban
scenes without any sky at all could be improved.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
104

REFERENCES
Ettinger, S. M., Nechyba, M. C., Ifju, P. G., and Waszak,
M. (2002). Towards flight autonomy: Vision-based
horizon detection for micro air vehicles. In Florida
Conference on Recent Advances in Robotics 2002.
Fefilatyev, S., Smarodzinava, V., Hall, L. O., and Gold-
gof, D. B. (2006). Horizon detection using machine
learning techniques. In ICMLA ’06: Proceedings of
the 5th International Conference on Machine Learn-
ing and Applications, pages 17–21, Washington, DC,
USA. IEEE Computer Society.
Gallagher, A. C., Luo, J., and Hao, W. (2004). Improved
blue sky detection using polynomial model fit. In Im-
age Processing, 2004. ICIP ’04. 2004 International
Conference on, volume 4, pages 2367–2370.
Horowitz, S. and Pavlidis, T. (1974). Picture segmentation
by a directed split-and-merge procedure. In Proceed-
ings of the Second International Joint Conference on
Pattern Recognition, pages 424–433.
Luo, J. and Etz, S. P. (2002). A physical model-based ap-
proach to detecting sky in photographicimages. IEEE
Transactions on Image Processing, 11(3):201–212.
M. Kuwahara, K. Hachimura, S. Eiho, and M. Kinoshita
(1976). Processing of ri-angiocardiographic images.
In Preston, K. and Onoe, M., editors, Digital Process-
ing of Biomedical Images, pages 187–202.
Rehrmann, V. (1994). Stabile, echtzeitf¨ahige Farbbil-
dauswertung. PhD thesis, Universit¨at Koblenz-
Landau, F¨olbach Verlag, Koblenz.
Rehrmann, V. and Priese, L. (1998). Fast and robust seg-
mentation of natural color scenes. In Chin, R. T.
and Pong, T.-C., editors, 3rd Asian Conference on
Computer Vision (ACCV’98), number 1351 in LNCS,
pages 598–606. Springer Verlag.
Schmitt, F. and Priese, L. (2008). Himmelsdetektion in
CSC-segmentierten Farbbildern. In Farbworkshop
2008, Aachen.
Zafarifar, B. and de With, P. H. N. (2006). Blue sky
detection for picture quality enhancement. In Ad-
vanced Concepts for Intelligent Vision Systems, vol-
ume 4179/2006 of Lecture Notes in Computer Sci-
ence, pages 522–532. Springer Berlin / Heidelberg.
APPENDIX
Sample Images
In the following images 4 to 6 the input image of our
algorithm is shown on the left and the result of classi-
fication on the right. White represents segments clas-
sified as sky, gray represents segments which are sky
colored but not classified as sky, black represents seg-
ments which are not sky colored.
The following picture 7 shows an example where
the algorithm fails to correctly identify the sky. The
segment encircled in red was falsely classified as sky
as even in the CSC-segmentation phase the white
front was melted into a larger sky segment.
SKY DETECTION IN CSC-SEGMENTED COLOR IMAGES
105

Figure 4: Photo taken at sunshine with fair-weather cloud.
Figure 5: Photo taken in rainy weather.
Figure 6: Sky colored segments in a building front which aren’t classified as sky due to shape analysis.
Figure 7: Erroneous CSC segmentation: A white building front merges into one segment with the heavily clouded sky.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
106
