
LANE CHANGING MODEL WITH EARLY
COMMUNICATION OF INTENTIONS
Tomoki Takasago
Graduate School of Science & Technology, Kwansei Gakuin University, 2-1, Gakuen, Sanda, 669-1337, Japan
Kazuko Takahashi
School of Science & Technology, Kwansei Gakuin University, 2-1, Gakuen, Sanda, 669-1337, Japan
Keywords:
Changing lanes, Multi-agents, Intelligent transportation systems, Cooperative driving, Agent simulation.
Abstract:
This paper describes the modeling and simulation of traffic flow with lane changing based on inter-vehicle
communications. We regard vehicles as autonomous agents, and construct a simple traffic model in which
some agents change lanes. We propose a new method for an agent to change lanes in which it tells the neigh-
boring agents its intention beforehand, shares information with them, and determines the lane change time in
cooperation with the other agents. The result of simulating this model showed that the early communication
of intentions is effective in avoiding traffic jams and supporting smooth transportation.
1 INTRODUCTION
Research into alleviating traffic jams and smoothing
traffic flow is receiving increased attention due to the
advances in Global Positioning System (GPS) devices
and car navigation systems.
One reason for traffic jams and collisions is a lack
of understanding between vehicles, meaning that one
vehicle does not know what other vehicles intend to
do. In this research, we focus on lane changing in
which mutual understanding and cooperation is es-
sential.
Lane changing occurs frequently on roads with
multiple lanes, crossings, or highway entrances and
exits, and changing lanes smoothly becomes more
difficult if the road is congested. Signal flashers are
one method of indicating lane-changing intention ex-
plicitly, but they are not always easily noticed on a
congested road. This results in aggressive lane chang-
ing or vehicles making mutual concessions to lose a
good timing.
In the field of intelligent transportation systems
(ITS), research on intelligent driving with inter-
vehicle communication using traffic simulation tools
has been a topic of some interest (Kato et al., 2002;
Ammoun et al., 2007; Kanaris et al., 2001). The aim
of such research is safe driving without traffic acci-
dents, and the mechanism for cooperation and inter-
action between vehicles is generally not considered.
In the field of artificial intelligence (AI), several
traffic models that consider vehicles as agents have
been proposed, but few of them examine lane chang-
ing with communication. Ehlert and Rothkranz mod-
eled a vehicle using an agent that determines its be-
havior reactively based on the environment, but no
communication occurs between agents (Ehlert and
Rothkrantz, 2001). Dresner and Stone developed
a model in which vehicles as well as intersections
are modeled as agents that communicate with each
other (Dresner and Stone, 2005).
Nagel and Schreckenberg proposed the cell au-
tomaton model, which simulates traffic flow (Nagel
and Schrechenberg, 1992). Since then, many studies
have used cell automatons to model traffic flows that
include lane changing (Su et al., 2005; Jin et al., 1999;
Knospe et al., 1999). The main goal of this series of
works was to create a traffic model that simulates a
realistic traffic flow, not to model the cooperation and
interaction between agents.
Changing lanes is usually performed as follows:
finding a gap of sufficient size between vehicles in the
target lane, activating the appropriate signal flasher,
and changing lanes. Gipps analyzed the procedure of
lane changing and proposed a basic model (Gipps,
1986). According to Gipps, lane changes occur for
several reasons:
455
Takasago T. and Takahashi K. (2009).
LANE CHANGING MODEL WITH EARLY COMMUNICATION OF INTENTIONS.
In Proceedings of the International Conference on Agents and Artificial Intelligence, pages 455-461
DOI: 10.5220/0001653804550461
Copyright
c
SciTePress
• the physical possibility of safely changing lanes
without an unacceptable risk of collision
• the location of permanent obstructions
• the presence of special-purposelanes such as tran-
sit lanes
• the driver’s intended turning direction
• the presence of heavy vehicles
• the possibility of gaining a speed advantage
Hidas showed that Gipps’s model is not appli-
cable on congested roads, and proposed a new one.
He noted that lane changing is either a cooperative
or a forced maneuver on congested roads (Hidas,
2002). He assumed inter-vehicle communication, and
showed that the results of a simulation based on his
model coincided with observed traffic data (Hidas,
2005).
Inter-vehicle communication related to lane
changing (i.e., the indication of the intent to change
lanes), however, occurs immediately before the vehi-
cle starts the lane-change action in the models pro-
posed so far. Therefore, lane changing is unsafe
and requires time when the target lane is congested.
Moreover, only the cooperation of the vehicles in the
target lane after the communication is considered, not
the behavior of the subject vehicle before the com-
munication. In fact, the subject vehicle may change
speed to find an appropriate space to move into be-
fore actually changing lanes. In addition, when two
vehicles in almost the same position in neighboring
lanes wish to change lanes at the same time, deadlock
will occur, and this issue is not considered so much.
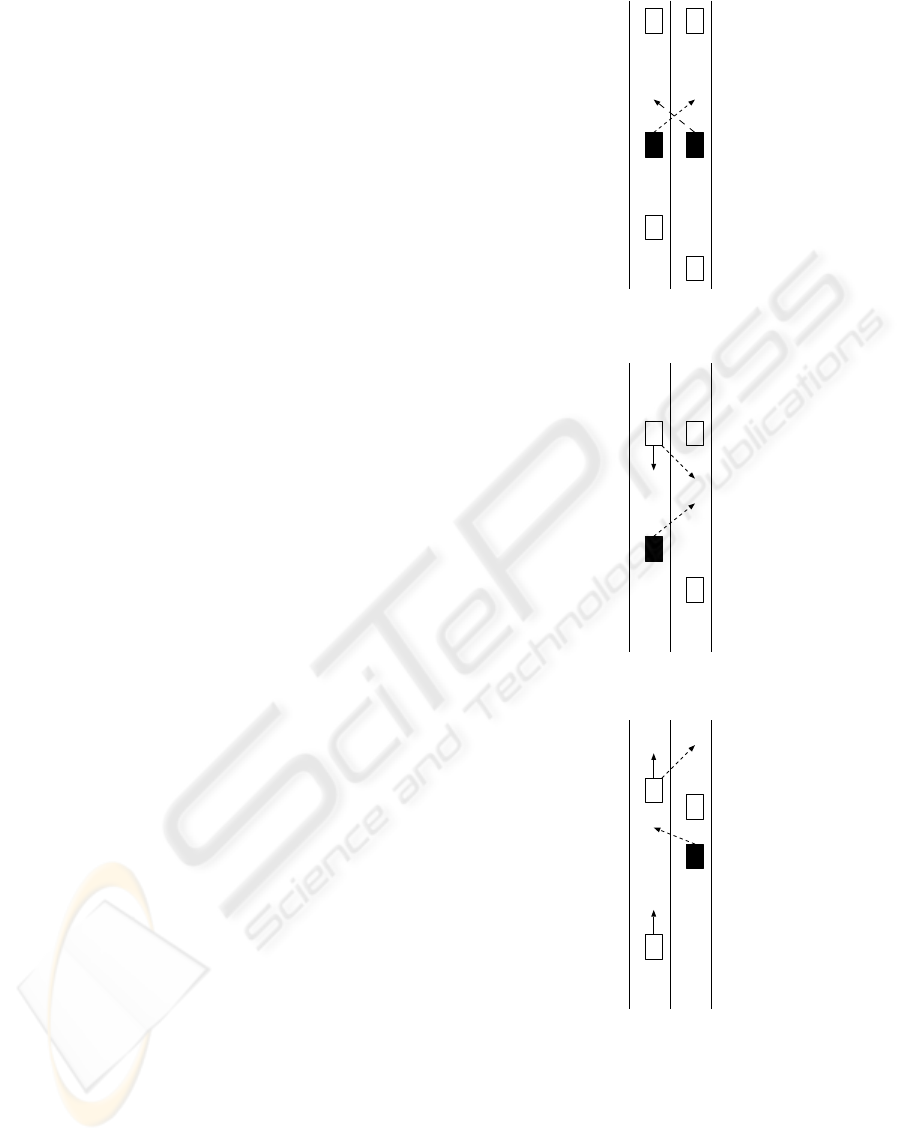
Consider a specific example. A vehicle in the left
lane wishes to move to the right lane, while another
vehicle right next to it in the right lane wishes to move
to the left lane at exactly the same time as shown in
Fig. 1. This is considered to be a type of deadlock.
Both vehicles might take exactly the same action, that
is, seek enough space in the adjacent lane only to dis-
cover that this does not exist, then decrease speed and
wait for another chance. As a result, neither vehicle
may find a suitable opportunity for a long time.
Consider another situation. One vehicle intends
to change lanes, and sufficient space exists in the tar-
get lane, but the vehicle ahead decelerates (Fig. 2),
possibly in preparation for a lane change of its own.
However, the subject vehicle does not know the rea-
son for the deceleration and cannot judge whether it
should change lanes immediately or continue at re-
duced speed for reasons of safety.
Consider yet one more situation. The subject ve-
hicle intends to change lanes. As it is just about to do
so, the preceding vehicle in the adjacent lane acceler-
ates as shown in Fig. 3, and the vehicle behind it also
Figure 1: Deadlock case.
?
Figure 2: Indeterminate case.
?
Figure 3: Blocked case.
accelerates without knowing why the vehicle ahead
has sped up. This reduces the gap, and the subject
vehicle loses its chance to change lanes.
All these problems occur because the vehicles do
not know the reason for the actions of the others.
In this paper, we propose a model in which the in-
tentions of vehicles are shared, not just before chang-
ing lanes, but even earlier so that both the subject ve-
ICAART 2009 - International Conference on Agents and Artificial Intelligence
456
hicle and the vehicles in the target lane have sufficient
time to prepare. Thus, lane change can take place
smoothly at the appropriate time. The vehicles all un-
derstand the intentions of others because they share
information and cooperate with each other to allevi-
ate traffic jams and collisions.
This paper is organized as follows. In section 2,
we present the basic lane-changing model without
inter-vehicle communications, and in section 3, we
propose the model with early communication. In sec-
tion 4, we describe and evaluate the experimental re-
sults. In section 5, we compare our method with re-
lated work. Finally, in section 6, we present our con-
clusions.
2 BASIC MODEL
2.1 Road
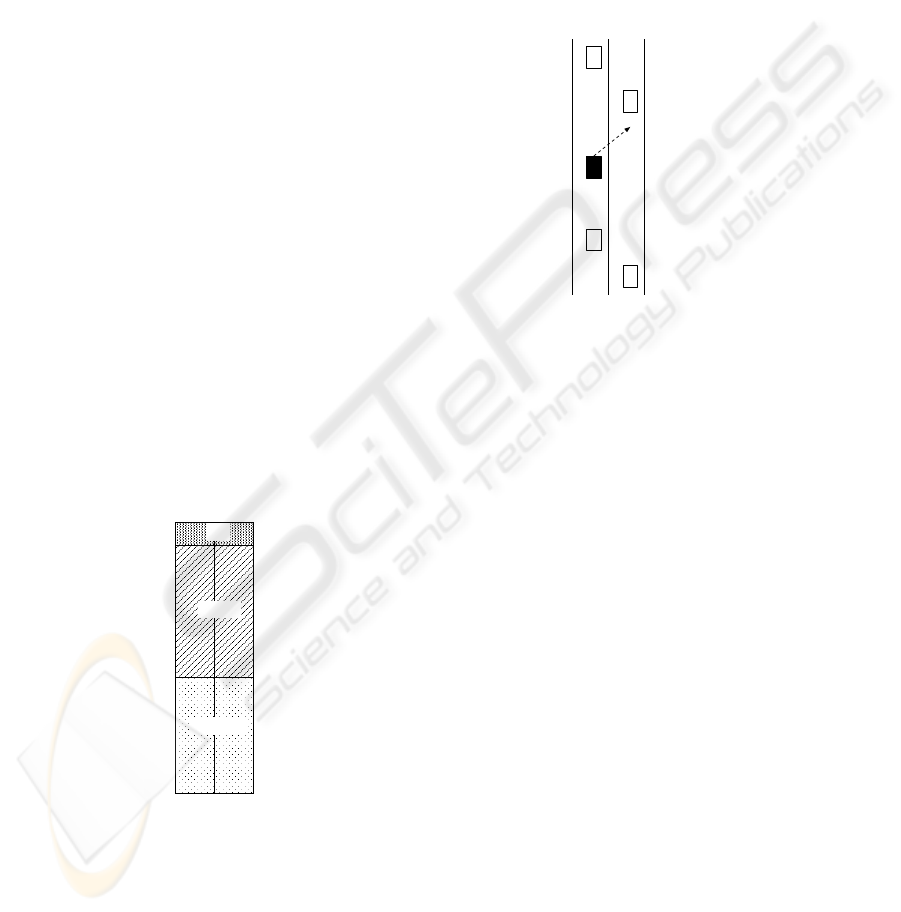
A road is defined as a sector between signals that con-
sists of two straight lanes. Each sector is divided into
three zones as shown in Fig. 4: entrance, middle and
exit. The entrance is the first zone from the start line,
the exit is the final zone before the end line, and the
middle is the zone in-between. Lane changing occurs
only in the middle and exit zones, so that the model
can reflect the effect of lane changing on the cars be-
hind. (If lane changing were permitted to occur in
the entrance zone, the start time of vehicles would be
delayed, and congestion would not occur.)
middle
exit
entrance
end
start
Figure 4: Road model.
2.2 Vehicle
Each vehicle is modeled as an autonomous agent
that has its own intention and determines its behav-
ior by communicating with other vehicles. The ac-
tion of changing lanes affects the behavior of the other
agents.
Each agent has two goals: to accomplish its own
intention and to contribute to achieving the goals of
the others. These goals, however, sometimes oppose
each other. Even if no such opposition exists, a behav-
ior may be good for one agent but not for the others.
The vehicles immediately ahead and behind the
subject vehicle in the current lane are called the cur-
rent preceder and the current follower, respectively.
The vehicle just ahead and just behind the subject ve-
hicle in the other lane are called the new preceder and
the new follower, respectively, as shown in Fig. 5.
1: current preceder
2: current follower
3: new preceder
4: new follower
1
2
3
4
0: subject agent
0
Figure 5: Agents involved in a lane change.
Each agent starts when a sufficient distance is
made between it and the immediately preceding
agent. It has its own goal lane, and if the goal lane
is different from the initial lane, it intends to change
lanes. The velocity of each agent is one of stop, slow,
normal, and fast. This is determined depending on
the distance from the immediate preceding agent and
the distance that will avoid a collision while changing
lanes.
Each agent should satisfy the following condi-
tions.
• Sufficient distance should exist between it and
the current preceder. When the current preceder
stops, the subject agent decelerates gradually to
stop just behind the current preceder.
• When an agent that intends to change lanes en-
ters the middle zone and checks the environment,
if sufficient distance to the new preceder and the
new follower exists, it then activates its signal
flasher; otherwise, it decelerates and waits for an-
other chance to change lanes safely.
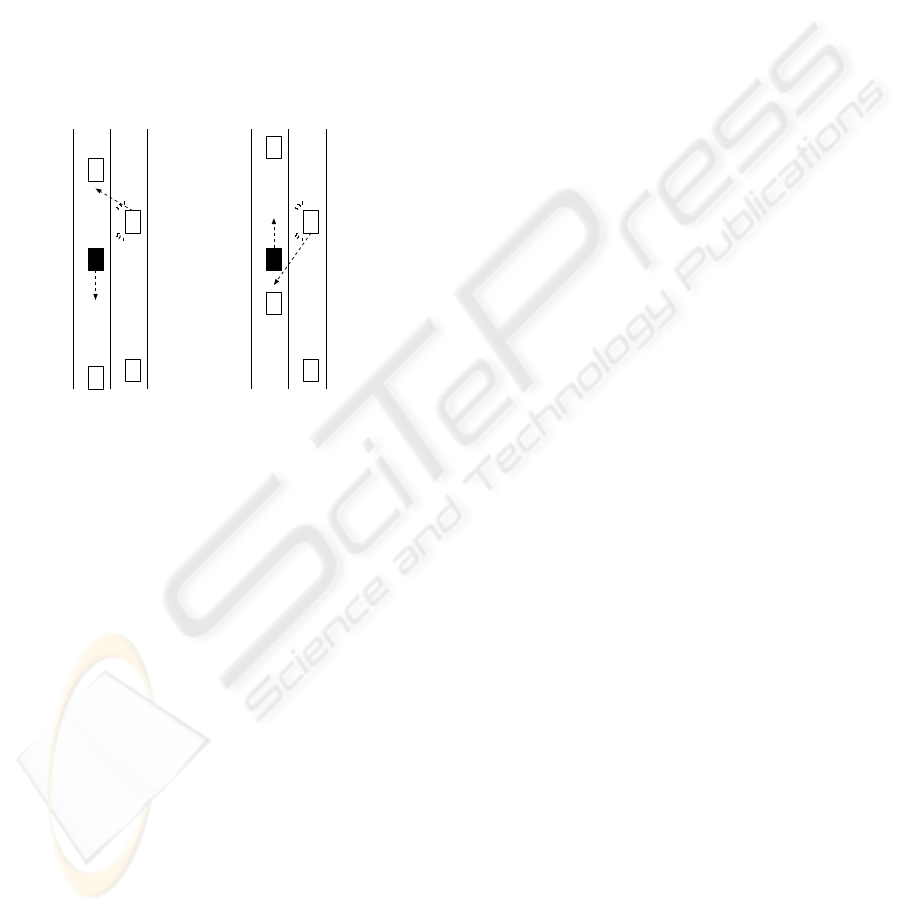
• When an agent notices the blinking signal flasher
of an agent in the adjacent lane, it decelerates
(Fig. 6(a)) or accelerates (Fig. 6(b)) depending on
the distance between it and the current preceder
and current follower. In either case, it cooperates
so that the agent with the blinking signal flasher
can change lanes smoothly.
LANE CHANGING MODEL WITH EARLY COMMUNICATION OF INTENTIONS
457
• If an agent cannot find an opportunity to change
lanes safely while it is in the middle zone, then the
change of lanes takes place in the exit zone at the
highest priority. If several agents intend to change
lanes, then their lane changes are accomplished on
a first come, first served basis.
• When two agents are at almost the same level in
neighboring lanes, then both of them decelerate
and wait for a better time to exit the state of dead-
lock. If such a state continues in a designated time
interval, then one of them is given the priority for
changing lanes.
Note that the signal flasher is not activated until
safe lane changing is guaranteed.
(a) (b)
Figure 6: Behavior of the agent upon noticing a blinking
signal flasher.
3 MODEL WITH EARLY
COMMUNICATION OF
INTENTIONS
Lane changing in the basic model has two main draw-
backs. One is that an agent may miss a chance to
change lanes due to the behavior of other agents.
The other is the possibility of deadlock between two
agents in the same position in different lanes. To
eliminate these problems caused by a lack of mutual
understanding, we propose a model in which agents
communicate with each other to convey their inten-
tions in advance.
We call the agent in the target lane nearest the
subject agent the partner. The partner is either a
new preceder or a new follower of the subject agent.
The request message for lane changing is sent in the
entrance zone. The partner replies with a message
of acceptance or rejection. When the request is ac-
cepted, the agent in the target lane tries to facilitate
lane changing by the subject agent. Otherwise, the
subject agent itself manages to control its speed to get
a chance of safe lane changing. Thus both agents co-
operate. Moreover, when the partner receiving the
lane change request decides to accelerate, it sends
a message to its current follower to warn of a new-
comer. We call this message a newcomer notification.
It is this message that gives the reason for the acceler-
ation. If this message were not sent, then the follower
would also accelerate without knowing why the pre-
ceder was accelerating, which would leave no space
for a newcomer.
The subject agent sends the lane-change request
message only once. Agents do not engage in a com-
plicated negotiation. In this model, communication
of intention is performed in the entrance zone, lane
changing is usually conducted in the middle zone, and
final lane changing occurs in the exit zone.
We describe the protocols for changing lanes be-
low.
The Agent that Intends to Change Lanes
1. If it does not receivea newcomer notification from
its current preceder, it maintains speed and sends
its request message to the partner.
2. If it receives a newcomer notification from its cur-
rent preceder and if it does not receive a lane-
change request from the adjacent lane, it decel-
erates without sending a request.
3. If it receives a newcomer notification from its cur-
rent preceder and also receives a lane-change re-
quest from the adjacent lane, it decelerates and
sends a request message to the partner.
The Agent Receiving the Lane-change Request
1. If it has no intention of changing lanes
(a) If it receives a newcomer notification from its
current preceder, it decelerates.
(b) If sufficient distance exists behind the current
preceder, it accelerates, sends an acceptance
message to the subject agent, and also sends
a newcomer notification message to its current
follower.
(c) If sufficient distance exists behind the current
follower, it decelerates and sends an acceptance
message to the subject agent.
(d) Otherwise, it maintains its speed and sends a
rejection message to the subject agent.
2. If it intends to change lanes
(a) If it receives a newcomer notification from its
current preceder, it maintains its speed without
sending a request.
(b) Otherwise, it decelerates without sending a re-
quest.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
458
The Agent Receiving the Acceptance
1. It maintains the current speed and changes lanes
according to the basic model when it enters the
middle zone.
The Agent Receiving the Rejection
1. If sufficient distance exists behind the current pre-
ceder, it accelerates.
2. If sufficient distance exists ahead of the current
follower, it decelerates.
3. Otherwise, it maintains its speed.
4 EXPERIMENT
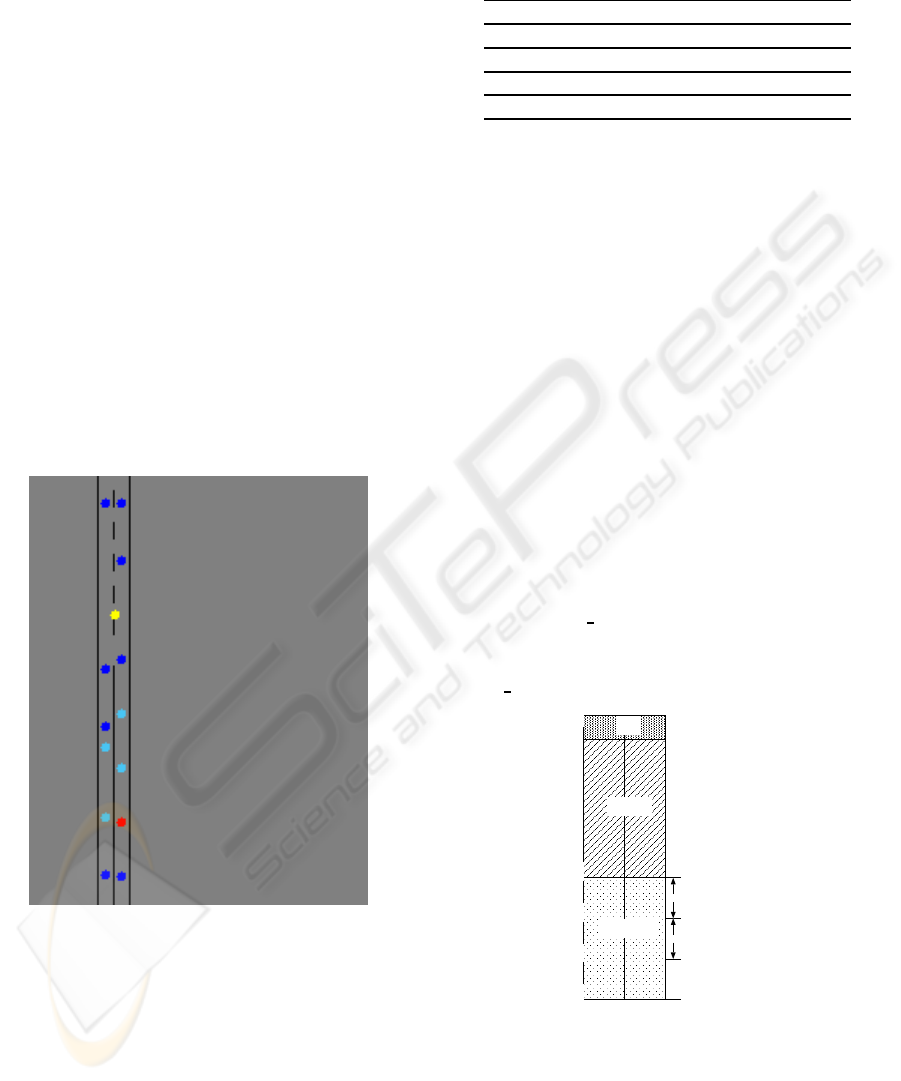
4.1 Simulation
We implemented the model using Java and performed
simulations under different conditions to demonstrate
the effectiveness of early communication of inten-
tions. Figure 7 shows a screenshot of our system.
Figure 7: System screenshot.
We assume that all agents are equivalent; i.e., they
are of the same size, the same performance, and ex-
hibit behavior based on the same maneuvers. The pa-
rameters used in the simulation are shown in Table 1.
4.2 Experimental Results
We performed simulations for three data patterns.
Data patterns 1 and 2 are the cases in which the agents
in both lanes intend to move to adjacent lanes, where
Table 1: Parameters. (px = pixels).
length of the road 700 px
length of the entrance zone 350 px
length of the exit zone 40 px
size of the agent 10 px
smallest safe gap between agents 20 px
total number of agents 50
the times of simulation 100
the rates of the agents that change lane are 30% (data
pattern 1) and 50% (data pattern 2), respectively. Data
pattern 3 is the case in which only the 50% of agents
in the left lane intend to move to the right lane.
We investigated how smoothly lane changing oc-
curs depending on the existence of early communica-
tion.
Tables 2– 4 show the results. In these tables, as
shown in Fig. 8, (a) is the case with no communi-
cation, (b) is the case in which the communication
is performed 234–350 pixels (px) after the start line,
and (c) is the case in which the communication is
performed 117–234 (px) after the start line. DL is
the number of deadlocks, and Final is the number
of agents that change lanes in the exit zone. All the
agents are ready to start when the time is zero, and
each agent starts when a sufficient space is made be-
tween it and the immediately preceding agent. Start
is the mean number of starting time (step) of all the
agents and start SD is its standard deviation. Travel
is the mean number of time (steps) required for each
agent to travel from the start line to the end line, and
travel SD denotes its standard deviation.
middle
exit
entrance
0
350
700
communication
area in (b)
communication
area in (c)
117
234
Figure 8: Areas in which communication is performed.
4.3 Evaluation
Two Goal Lanes (Data Patterns 1 and 2). We
compare the result with communication (b)(c) and
that without communication (a). Both the number
LANE CHANGING MODEL WITH EARLY COMMUNICATION OF INTENTIONS
459

Table 2: Pattern1.
DL final start start SD travel travel SD
(a) 0.16 4.09 200.71 127.59 331.41 29.53
(b) 0.00 0.85 202.02 129.83 318.25 24.95
(c) 0.00 1.11 202.22 130.15 317.96 24.59
Table 3: Pattern 2.
DL final start start SD travel travel SD
(a) 0.74 8.93 212.71 141.54 405.75 65.23
(b) 0.01 1.33 217.15 149.11 365.28 45.14
(c) 0.02 1.26 213.78 146.19 362.26 47.50
of deadlocks and that of the agents finally changing
lanes are smaller in the former case. Both starting de-
lay and traveling time are smaller, and their standard
deviations are also smaller in the former case. It fol-
lows that early communication is effective in achiev-
ing smooth lane changes. It is much effective in the
case the rates of the agents that change lane is high.
What about the timing of communication? Com-
paring the results (b) and (c), there is no big differ-
ence. If communication is performed just before en-
tering the middle zone, there may not be enough time
to prepare for a smooth lane change. On the other
hand, if communication is performed earlier, the sit-
uation may change after the preparation is accom-
plished. It is necessary to determine the timing of
communication depending on the traffic situation.
One Goal Lane (Data Pattern 3). The delay of the
start was large since one lane was too congested to
create a sufficient gap behind the preceder. In this
case, the agents starting earlier succeeded in changing
lanes smoothly, while those starting later could not
find a safe gap immediately and arrived at the end line
rather late. That is why the standard deviations of the
starting time and travelling time are larger in (b)(c).
In this case, early communication is not so effective,
comparing with the case of two goal lanes.
5 DISCUSSION
Numerous studies have been done on traffic con-
trol for autonomous driving, including lane chang-
ing. While most of these models assume inter-vehicle
communications, these occur just before the action
and do not convey the intention in advance. More-
over, the case of deadlock is not correctly modeled.
Hidas proposed a lane-changing model for con-
gested roads (Hidas, 2002) and divided the pattern
of lane changing into three, free, cooperative, and
forced, insisting that the last two patterns occur on
congested roads. When an agent intends to change
lanes but doing so is not feasible, it then sends a cour-
tesy message. In cooperative maneuvering, the sub-
ject agent waits until agents in the target lane make a
space for it before changing lanes, while in the forced
maneuver, the subject agent changes lanes even if not
enough space exists; after the change, the agents fol-
lowing the subject agent decelerate to create a safe
distance. Hidas showed the result of his evaluation
when incidents occur and changing lanes is essential.
The model with communication is more advantageous
than the one without, both in terms of travel time and
traffic flow. Later he analyzed video recordings of
real traffic flow and showed that the proposed simula-
tion model correctly represented the observed traffic
pattern (Hidas, 2005).
The difference between the Hidas model and ours
is in the behavior of the subject agent when lane
changing is not feasible. In the Hidas model, the sub-
ject agent has a plan that is shared with the agents
in the target lanes. The subject agent waits for the
chance without taking any positive action. In our
model, the subject agent itself changes speed. It fol-
lows that our model is more cooperativesince both the
subject agent and the responders cooperate to achieve
the same goal. In addition, we use early communica-
tion of intentions while the Hidas model does not.
6 CONCLUSIONS
We proposed a model with early communication of
intention to change lanes that creates more coopera-
tive behavior among the agents involved. We created
a simulator based on this model and showed that the
model has the following characteristics:
• collision-free
• almost deadlock-free
ICAART 2009 - International Conference on Agents and Artificial Intelligence
460

Table 4: Pattern 3.
DL final start start SD travel travel SD
(a) 0.00 22.06 201.93 132.63 540.95 156.00
(b) 0.00 18.72 214.10 145.07 505.95 152.54
(c) 0.00 19.42 205.00 135.38 516.29 168.58
• produces a short travel time for each agent
In this paper, we put the assumption that all agents
are cooperative and follow the protocol. It is be-
cause our target is an autonomous driving environ-
ment, which is considered to be an advanced form of
the automated highway systems. However, it is inter-
esting to simulate the case in which some agents do
not follow the protocol as a more realistic situation.
Moreover, we plan to extend the model to cover
the following cases:
• more than two lanes
• multiple sectors
• sudden arrival of a vehicle from a structure beside
the road
From the theoretical point of view, we are consid-
ering a more refined model of lane changing based on
the inner state of agents. The inner state of agents can
be suitably modeled using the Belief-Desire-Intention
(BDI) model (Wooldridge, 2000). The environment
perceivedby an agent and messages sent by the neigh-
boring agents are regarded as beliefs of an agent, the
request conveyed earlier is regarded as a desire, and
the request just before taking the action is considered
an intention. In this way, we hope to create a more
refined model and simulate the agent behaviors from
another perspective.
REFERENCES
Ammoun, S., Nashashibi, F., and Laurgeau, C. (2007). An
analysis of the lane changing manoeuvre on roads :
the contribution of inter-vehicle cooperation via com-
munication. In Intelligent Vehicles Symposium, 2007
IEEE, pages 1095–1100.
Dresner, K. and Stone, P. (2005). Multiagent traffic manage-
ment: An improved intersection control mechanism.
In AAMAS05, pages 25–29.
Ehlert, P. and Rothkrantz, L. (2001). Microscopic traffic
simulation with reactive drving agents. In Proc. of
Intelligent Transportation Systems, pages 860–865.
Gipps, P. (1986). A model for the structure of lane-changing
decisions. Transportation Research, 20B:107–120.
Hidas, P. (2002). Modelling lane changing and merging
in microscopic traffic simulation. Transportation Re-
search Part C: Emerging Technologies, 10(5):351–
371.
Hidas, P. (2005). Modelling vehicle interactions in micro-
scopic simulation of merging and weaving. Trans-
portation Research Part C: Emerging Technologies,
13(1):37–62.
Jin, W., Zheng, Y., and Li, J. (1999). Microscopic simula-
tion of traffic flow at signalized intersection based on
cellular automata. In Proc. of the IEEE International
Vehicle Electronics Conference, IVEC99, pages 106–
109.
Kanaris, A., Kosmatopoulos, E., and Ioannou, P. (2001).
Strategies and spacing requirements for lane changing
and merginging in automated highway systems. IEEE
Transactions on Vehicular Technology, 50(6):1568–
1581.
Kato, S., Tsugawa, S., Tokuda, K., Matsui, T., and Fujii,
H. (2002). Vehicle control algorithm for cooperative
driving with automated vehicles and intervehicle com-
munications. IEEE Trans. on Intelligent Transporta-
tion Systems, 3(3):155–161.
Knospe, W., Santen, L., Schadschneider, A., and Schreck-
enberg, M. (1999). Disorder effects in cellular au-
tomata for two-lane traffic. Physica A, (265):614–633.
Nagel, K. and Schrechenberg, M. (1992). A cellulear
automaton model for freeway traffic. Journal of
Physique, I(2):2221–2229.
Su, X., Jin, X., Min, Y., and Peng, B. (2005). Study on
asymmetric two-lane traffic model based on cellular
automata. In 5th International Conference on Compu-
tational Science (ICCS05), pages 599–606. Springer.
Wooldridge, M. (2000). Reasoning about Rational Agents.
The MIT Press.
LANE CHANGING MODEL WITH EARLY COMMUNICATION OF INTENTIONS
461
