
AN INTELLIGENT TUTORING SYSTEM FOR OPERATORS’
TRAINING IN POWER SYSTEM CONTROL CENTRES
Luiz Faria, António Silva, Zita Vale, Carlos Ramos
Knowledge Engineering and Decision Support Research Centre, Institute of Engineering – Polytechnic of Porto, Portugal
Albino Marques
REN – Energy Networks of Portugal, Porto, Portugal
Keywords: Intelligent Tutoring Systems, Intelligent Alarm Processing, Diagnosis, Restoration, Control Centres, Power
Systems.
Abstract: The activity of Control Center operators is important to guarantee the effective performance of Power
Systems. Operators’ actions are crucial to deal with incidents, especially severe faults, like blackouts. In this
paper we present an Intelligent Tutoring approach for training Portuguese Control Centre operators in tasks
like incident analysis and diagnosis, and service restoration of Power Systems. Intelligent Tutoring System
(ITS) approach is used in the training of the operators, taking into account context awareness and the
unobtrusive integration in the working environment.
1 INTRODUCTION
Current Power Systems are highly complex and
require sophisticated and precise operation and
control. The most important real-time decisions
concerning Power System operation are taken in
Control Centres where human operators are the final
link of a complex chain. Although Power System
reliability has been increasing, incidents with more
or less severe consequences still occur. In some
cases, this can result in blackout situations, leading
to consumer lack of supply, for which the economic
and social impact can be dramatically high. Figure 1
shows the impact of the 14th August 2003 blackout
in the Northeast part of USA.
Blackouts have been a major concern in Power
Systems mainly since the occurrence of the 9th
November 1965 Northeast Blackout in USA. In
recent years, several blackouts caused major
concerns making the need to keep lights on more
important than ever. IEEE Power & Energy
magazine edited a special issue titled “Shedding
light on blackouts – From prevention through
restoration” (vol.4, no. 5, September/October 2006).
On the 4th October 2006, a Saturday, some minutes
after 10 p.m., the UCTE (Union for the Coordination
of Transmission of Electricity) European Network
experienced a quasi blackout situation affecting 9
European countries and North Africa and about 10
million consumers, originated from a switching-off
of the 380 kV double circuit line Conneforde-Diele
in Germany.
Figure 1: Northeast USA before and after the 14th August
2003 Blackout (Source: NOAA – National Oceanic &
Atmospheric Administration).
Control Center operators’ performance is
determinant to minimize the incident consequences.
The need of a good response of Control Centres to
severe faults, like blackouts, is even more important
nowadays, due to the generalization of the
Electricity Markets (Praça, Ramos, Vale, and
Cordeiro 2003). As Power Systems reliability
increased, the number of incidents offering occasion
for operator on-the-job training has decreased. The
consequences of incorrect operator behaviour are all
more severe during a serious incident (Vale et all
37
Faria L., Silva A., Vale Z., Ramos C. and Marques A. (2009).
AN INTELLIGENT TUTORING SYSTEM FOR OPERATORS’ TRAINING IN POWER SYSTEM CONTROL CENTRES.
In Proceedings of the International Conference on Agents and Artificial Intelligence, pages 37-44
DOI: 10.5220/0001656200370044
Copyright
c
SciTePress
1997). Operator training is vital for overcoming
these problems, as well as the availability of
decision support tools.
Intelligent Tutoring Systems (ITS) has been the
main approach selected to deal with the operators’
training in diagnosis and restoration tasks, namely
because:
1. They represent domain knowledge in a
structured way, allowing the inference of new
knowledge (access to the essential knowledge).
2. They model the trainee, allowing action in a
non-monotonous way, adapting better to the
trainee’s characteristics and evolution (awareness of
the needs of people).
3. With the right didactic knowledge they allow
the system to choose different pedagogical
approaches in the different phases of the learning
process (requirements customization).
4. They are able to constantly monitor the
trainee’s performance and evolution, gathering
information to guide the system's adaptation (context
awareness).
5. They typically require very little intervention
from the training staff, and can be used in the
working environment without disturbing the normal
working routines (unobtrusivity).
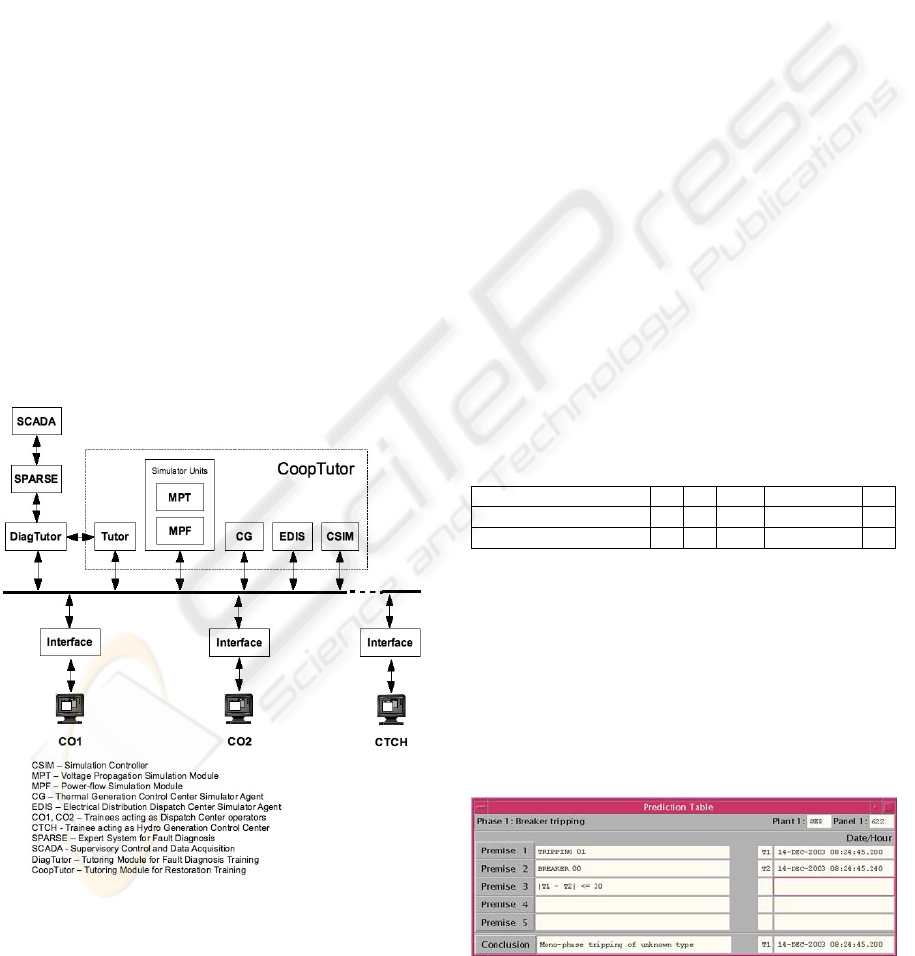
Figure 2: Tutoring Environment Architecture.
In this paper we present an Intelligent Tutoring
System used for training Control Centre operators in
fault diagnosis and power restoration. Several
Artificial Intelligence techniques are used to make
this system able to minimize network experts need
in training preparation and to enable on the job and
cooperative effective training.
The Intelligent Tutoring System that has been
developed for the Control Centre operators involves
two main areas: one devoted to the training of fault
diagnosis skills and another dedicated to the training
of power system restoration techniques. Figure 2
shows this tutoring environment architecture.
2 TUTORING MODULE FOR
FAULT DIAGNOSIS TRAINING
In order to illustrate how a training session is
conducted and the interaction between the operator
and the tutor, this section presents a very simplified
diagnosis problem containing a DmR (monophase
tripping with reclosure) incident, occurred in panel
204 of Ermesinde substation (SED). The relevant
SCADA messages related to this incident are
depicted in Table 1. These SCADA messages
correspond to the following events: breaker tripping,
breaker moving and breaker closing (Vale et all
1997). In a real training scenario the operator is
faced with a huge amount of messages, typically
several hundreds.
Table 1: Incident in panel 204 of SED substation.
14-DEC-2003 04:24:45.200 SED 204 CCL,2 >>>TRIPPING 0 1
14-DEC-2003 04:24:45.240 SED 204 CCL,2 -BK BREAKER 0 0
14-DEC-2003 04:24:45.860 SED 204 CCL,2 -BK BREAKER 0 1
2.1 Reasoning about Operator Answers
The interaction between the trainee and the tutor is
performed through prediction tables (Figure 3)
where the operator selects a set of premises and the
corresponding conclusion. The premises represent
events (SCADA messages), temporal constraints
between events or previous conclusions (Faria, Vale,
and Ramos, 2005).
Figure 3: Prediction Table.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
38
DiagTutor does not require the operator’s
reasoning to follow a predefined set of steps, as in
other implementations of the model tracing
technique (Anderson et al., 1995). In order to
evaluate this reasoning, the tutor will compare the
prediction tables’ content with the specific situation
model. This model is obtained by matching the
domain model with the inference undertaken by
SPARSE expert system (Vale et al., 1997). This
process is used to: identify the errors revealing
operator’s misconceptions; provide assistance on
each problem solving action, if needed; monitor the
trainee knowledge evolution; and provide learning
opportunities for the trainee to reach mastery.
The identified errors are used as opportunities to
correct the faults in the operator’s reasoning. The
operator’s entries in prediction tables cause
immediate responses from the tutor. In case of error,
the operator can ask for help which is supplied as
hints. Hinting is a tactic that encourages active
thinking structured within guidelines dictated by the
tutor. The first hints are generic, becoming more
detailed if the help requests are repeated.
ce1
ce4
ct1
ce2
ct4
cc2
cs11
ce1 ce4 ct1
cs6 ce2 ct4
cc2
cs8
TRIPPING / T1 BREAKER 00 / T2
BREAKER 01 / T3
|T1-T2|<=30
|T2-T3|<=100
Mono-phase tripping
of unknown type / T1
Mono-phase
re-closure / T3
Mono-phase tripping
with successful re-
closure (DmR) / T3
1 line-end DmR / T3
Higher granularity level Lower granularity level
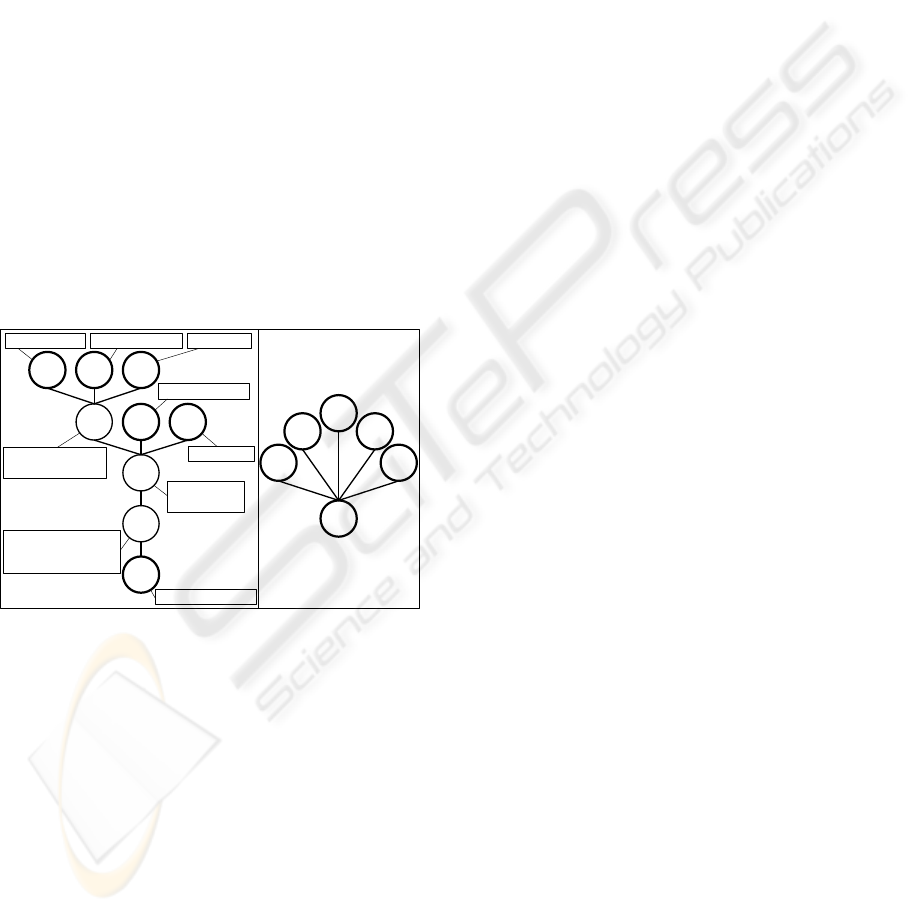
Figure 4: Higher and lower granularity levels of the
situation specific model.
The situation specific model generated by the
tutoring system for the problem presented is shown
in the left frame of Figure 4. It presents high
granularity since it includes all the elementary steps
used to get the problem solution. The tutor uses this
model to detect errors in the operator reasoning by
comparing the situation specific model with the set
of steps used by the operator. This model’s
granularity level is adequate to a novice trainee but
not to an expert operator. The right frame of Figure
4 represents a model used by an expert operator,
including only concepts representing events (ce
i
),
temporal constraints between events (ct
i
) and the
intermediate (cs
i
) and final conclusions (cc
i
). Any
reasoning model between the higher and lower
granularity level models is admissible since it does
not include any violation to the domain model.
These two levels are used as boundaries of a
continuous cognitive space.
2.2 Adapting the Curriculum to the
Operator
The main goal of the Curriculum Planning module is
to select, from a library, a problem fitting the trainee
needs.
The preparation of the tutoring sessions’
learning material is a time-consuming task. In the
industrial environment, there is not usually a staff
exclusively dedicated to training tasks. Specifically,
in the electrical sector, the preparation of training
sessions is done by the most experienced operators
which are often overloaded with power system
operation tasks (Faria, Vale and Ramos 2000). In
order to overcome this difficulty, we developed two
tools. The first one generates and classifies training
scenarios from real cases previously stored. As these
may not cover all the situations that control centre
operators must be prepared to face, another tool is
used to create new training scenarios or to edit
already existing ones (Faria, Vale and Ramos 2000).
The process used by the Curriculum Planning
module to define the problems’ features involves
two phases. First, the tutor must define the difficulty
level of the problem, using heuristic rules. These
rules relate parameters like the trainee’s
performance in previous problems and his overall
level of knowledge. In the second phase, the tutor
uses the user model’s contents to choose the type of
the most suitable incidents to be included in the
problem, taking into account the domain concepts
involved in each type of incident and the
corresponding trainee’s expertise.
2.3 Difficulty Level Selection
To evaluate the problems’ difficulty level, we need
to identify the cases’ characteristics that increase
their complexity, namely by the: number of
incidents involved in the case; variety of incident
types; number of involved plants; and existence of
chronological inversion in SCADA messages.
The choice of the difficulty level depends on two
factors contained in the trainee’s model: the trainee’s
global knowledge and a global acquisition factor.
AN INTELLIGENT TUTORING SYSTEM FOR OPERATORS’ TRAINING IN POWER SYSTEM CONTROL
CENTRES
39
The first parameter is a measure of the trainee’
knowledge level in the whole range of domain
concepts and is calculated using the mean of his
knowledge level in each domain concept. The
Curriculum Planning Module needs appropriate
thresholds for deciding on the next problem
difficulty level. The opinion of the trainees,
regarding their personal evolution as the problems
difficulty level is changed, can be used to tune these
thresholds.
The acquisition factors record how well trainees
learn new concepts. When a new concept is
introduced, the tutor monitors the trainee
performance on the first few problems, namely how
well and how quickly he solves them. This analysis
determines the trainee’s acquisition factor. The
procedure used to determine the trainee’s acquisition
in each domain concept is based on the number of
times the trainee’s knowledge level about the
concept increased, considering the three first
applications of the concept.
The mechanism used to define the difficulty
level of the problems is based on the following rule:
If the global knowledge level and the global
acquisition factor change in opposite directions
Then the problem difficulty level does not change
Else the problem difficulty level changes in the same
direction of the global knowledge level.
2.4 Problem Type Adequacy to the
Trainee Cognitive Status
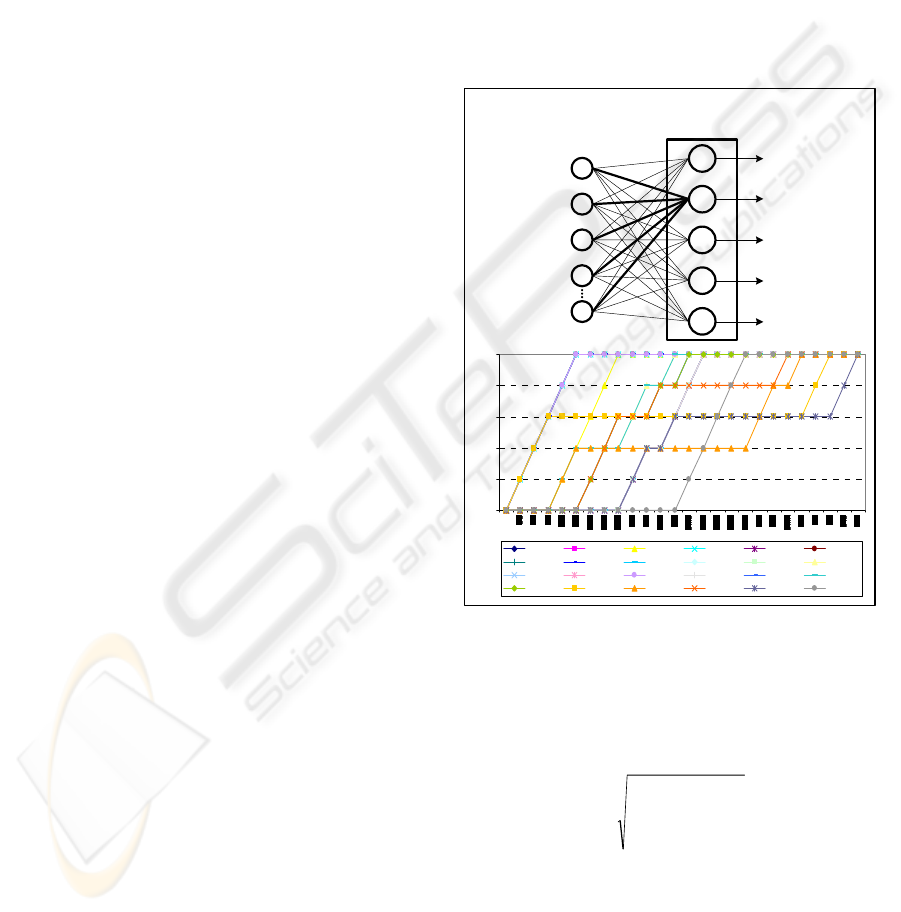
The mechanism used to classify each kind of
incident in terms of adequacy to the trainee is based
on a neural network (Fig. 5). The nodes belonging to
the input layer correspond to the concepts included
in the domain’s knowledge base (to be assimilated
by the trainees). Each node represents the
application of a concept in a specific context. For
instance, the nodes ce1/T1 and ce1/T5 represents
two instances of the same concept and characterize
the application of the concept of breaker tripping in
the situations of first tripping and tripping after an
automatic reclosure. The input vector contains an
estimate of the trainee’s expertise level for each
concept or its application and is obtained from the
user model. Therefore, this vector represents an
estimate of the trainee’s domain knowledge.
The output layer units represent the adequacy of
an incident type to the current learner’s knowledge
status. The number of units corresponds to the
number of incident types of the following types: DS
(single tripping); DtR (three-phase tripping with
reclosure); DmR (monophase tripping with
reclosure); DtD (three-phase tripping with reclosure
at both ends of the line); and DmD (monophase
tripping with reclosure at both ends of the line).
Each output layer’s node, representing a type of
incident, is connected only to the input nodes
corresponding to concepts involved with that
incident type. These connections are done with links
of weight wij.
The values used as weights are wij={1, 0, –}
where ‘–‘ is used to indicate that there is no
connection between node i of the output layer and
the input node j. This means that concept j is not
involved in an incident type i.
0,10
0,26
0,42
0,58
0,74
0,90
ce1/T1 ce1/T5 ce2/T4 ce3/T3 ce3/T7 ce4/T2
ce4/T6 ct1/T1/T2 ct1/T5/T6 ct2/T1/T3 ct2/T5/T7 ct3/T3/T4
ct4/T2/T4 ct5/T4/T5 cs5/T1 cs5/T5 cs6/T1 cs7/T4
cs8/T4 cs9/T1 cs10/T4 c s 11/ T 4 cs12/T5 cs13/T5
DmD
DtR
DmR
DS
DtD
Incident
types
Operator’s
knowledge
level
w
11
w
12
w
13
w
14
w
1n
a
1
a
5
a
4
a
3
a
2
x
1
x
2
x
3
x
4
x
n
Activation
level
Figure 5: Classification mechanism.
Each output neuron activation level is computed
using the input vector and its weight vector. The
activation is defined by the Euclidean distance,
given by (1).
1
2
∑
⎟
⎠
⎞
⎜
⎝
⎛
=
−=
n
j
j
x
ij
w
i
a
(1)
We can see that a neuron with a weight vector
(w) similar to the activation level vector of the input
nodes (x) will have a low activation level and vice
versa. The output layer’s node with the lowest
activation will be the winner.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
40
In Figure 5 we illustrate a situation where all the
model variables are set to their minimum value (0.1)
and achieve a maximum value of 0.9. It is also
assumed that the ideal operator applies correctly all
the domain concepts involved in the problem and
that the updating rate is constant.
It can be observed that, after the third iteration,
the concepts used in DS incident type overcome the
medium level (0.5), leading to a new type of incident
(DtR) in the next iteration. After the fourth iteration,
some concepts that are not used in DS but are
involved in DtR incident overtake the minimum
level for the first time.
We observed that an early introduction of new
concepts can contribute to increase the instructional
process efficiency. The problem selection
mechanism ensures that the problem sequence is not
monotonous, tending to stimulate the operator’s
performance with new kinds of incidents.
3 TUTORING MODULE FOR
RESTORATION TRAINING
3.1 Restoration Training Issues
The management of a power system involves several
distinct entities, responsible for different parts of the
network. The power system restoration needs a close
coordination between generation, transmission and
distribution personnel and their actions should be
based on a careful planning and guided by adequate
strategies (Sforna and Bertanza, 2002).
In the specific case of the Portuguese
transmission network, four main entities can be
identified: the National Dispatch Centre (CC); the
Operational Centre (CO); the Hydroelectric Control
Centres (CTCH); and the Distribution Dispatch
(EDIS).
The power restoration process is conducted by
these entities in such a way that the parts of the grid
they are responsible for will be slowly led to their
normal state, by performing the actions specified in
detailed operating procedures and fulfilling the
requirements defined in previously established
protocols. This process requires frequent negotiation
between entities, agreement on common goals, and
synchronization.
The purpose of the training tutor is to allow the
training of the established restoration procedures and
the drilling of some basic techniques. Power system
utilities have built detailed plans containing the
actions to execute and the procedures to follow in
case of incident. In the case of the Portuguese
network, there are specific plans for the system
restoration following several cases of sectorial
blackouts as well as national blackouts, with or
without loss of interconnection with the Spanish
network. Table 2 illustrates a service restoration
plan.
Table 2: Restoration Plan example.
Step
No.
PLAN STEP
0 Notify Distribution Dispatch Center about the
incident and expected restoration time. Wait for
150 kV to be available in SRA bus
1 Feed the 150kV to SRA bus using 400/150 kV
autotransformers
2 Switch SVI substation to manual
3 Energize the lines fed by the 150 kV bus of
SRA with priority to lines connected to
substations SOR and SRU and to power plants
CCD and CVN
4 Contact the Hydroelectric Power Plants’ CC,
asking for the restoration of their lines with
priority for the ones between CCD and CAR
and between CCD and SVI/CVF
5 Wait for the automatic operators of SCV and
SGR substations to restore the 150/60 kV
transformers, if no voltage is available in 60 kV
buses
6 Wait for SOR substation automatic operator to
restore the service, including the line to SVI
7 Finish the restoration of 150 kV line between
substations SRA and SED
8 Check if the automatic operators’ work is
concluded and finish the restoration if it has not
been done automatically
9 Notify Distribution Dispatch Center about the
end of the restoration process
Our Restoration training system use the concept
of agents (Jennings and Wooldridge, 1995), that can
be seen as virtual entities that possess knowledge
about the domain. As real operators, they have tasks
assigned to them, goals to be achieved and beliefs
about the network status and others agents’ activity.
They work asynchronously, performing their duties
simultaneously and synchronizing their activities
only when this need arises. Therefore, the system
needs a facilitator (simulator in Figure 2) that
supervises the process, ensuring that the simulation
is coherent and convincing.
In our system, the trainee can choose to play any
of the available roles, namely the CO and the CC
ones, leaving to the tutor the responsibility of
simulating the other participants.
AN INTELLIGENT TUTORING SYSTEM FOR OPERATORS’ TRAINING IN POWER SYSTEM CONTROL
CENTRES
41
3.2 Trainee’s Model
The representation method used to model the
trainee’s knowledge about the domain knowledge is
a variation of the Constraint-Based Modelling
(CBM) technique (Ohlsson, 1993). This student
model representation technique is based on the
assumption that diagnostic information is not
extracted from the sequence of student’s actions but
rather from the situation, also described as problem
state, that the student arrived at. Hence, the student
model should not represent the student’s actions but
the effects of these actions. Because the space of
false knowledge is much greater than the one for the
correct one, it was suggested the use of an
abstraction mechanism based on constraints. In this
representation, a state constraint is an ordered pair
(Cr,Cs) where Cr stands for relevance condition, and
Cs for satisfaction condition. Cr identifies the class
of problem states in which this condition is relevant
and Cs identifies the class of relevant states that
satisfy Cs. Under these assumptions, domain
knowledge can be represented as a set of state
constraints. Any correct solution for a problem
cannot violate any of the constraints. A violation
indicates incomplete or incorrect knowledge and
constitutes the basic piece of information that allows
the Student Model to be built on.
This CBM technique does not require an expert
module and is computationally undemanding
because it reduces student modelling processing to a
basic pattern matching mechanism. One example of
a state constraint can be found below:
If there is a request to CTCH to restore the lines
under its responsibility
Then the lines that connect to the hydroelectric
power plants must already have been restored
Otherwise an error has occurred
Each violation to a state constraint like the one
above enables the tutor to intervene both
immediately or at a later stage, depending on the
seriousness of the error or the pedagogical approach
that was chosen.
This technique has allowed us to give the tutor
the flexibility needed to address trainees with a wide
range of experience and knowledge, tailoring, in a
much finer way, the degree and type of support
given, and, at the same time, spared us the
exhaustive monitoring and interpretation of student’s
errors during an extended period, which would be
required by alternative methods.
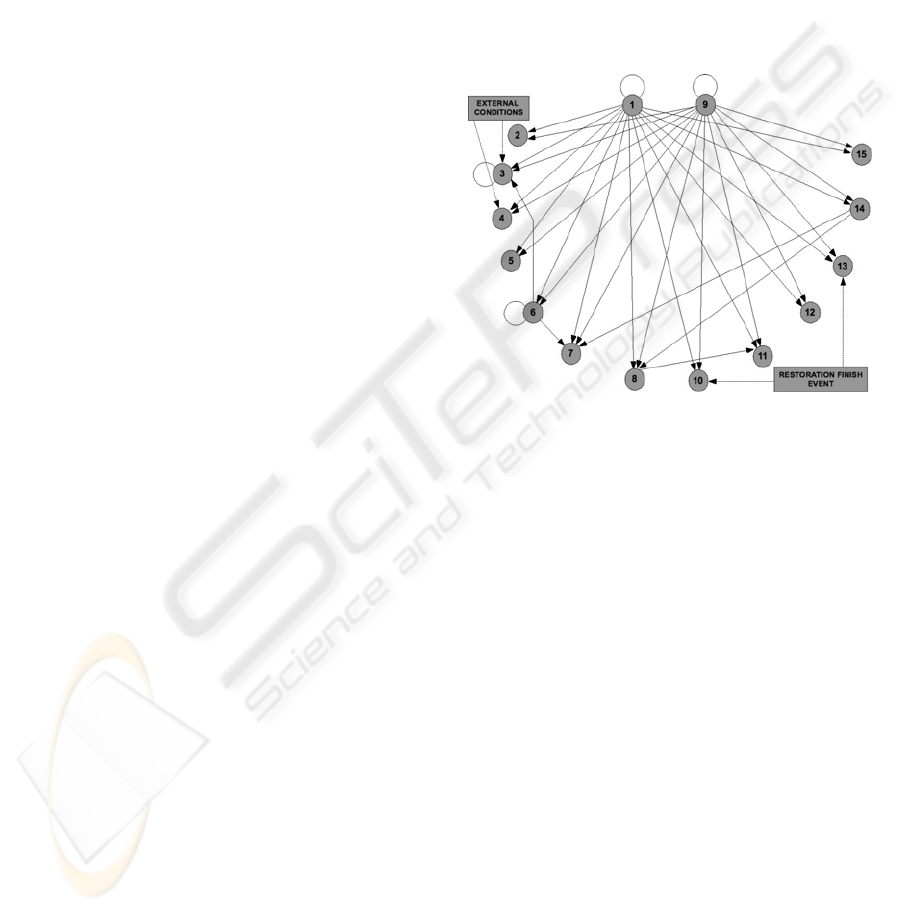
Nevertheless, it was found the need for a
metaknowledge layer in order to adapt the CBM
method to an essentially procedural, time-dependent
domain like the power system restoration field. This
layer is composed of rules that control the
constraints’ application, depending on several
issues: the phase of the restoration process in which
the trainee is; the constraints previously satisfied;
and the set of constraints triggered simultaneously.
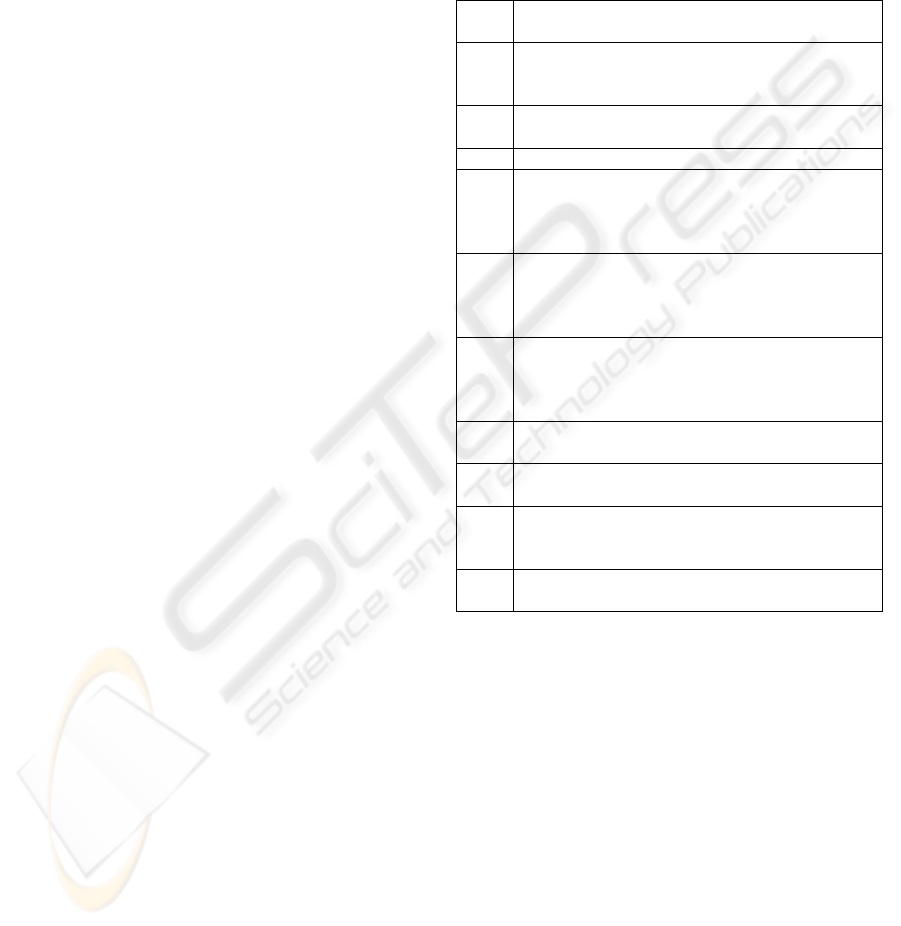
These rules establish a dependency network
between constraints that can be represented by a
graph (Figure 6) (Silva, Vale, and Ramos, 1995).
The relationships between constraints expressed by
this graph can be of precedence, mutual exclusion or
priority.
Figure 6: Constraint Dependency Graph.
3.3 The Cooperative Learning
Environment
This tutor is able to train individual operators as if
they were in a team, surrounded by virtual
“operators”, but is also capable of dealing with the
interaction between several trainees engaged in a
cooperative process. It provides specialized agents to
fulfil the roles of the missing operators and, at the
same time, monitors the cooperative work, stepping
in when a serious imbalance is detected. The tutor
can be used as a distance learning tool, with several
operators being trained at different locations.
To support the tutor monitoring activities of the
cooperative discussion and decision processes,
several provisions were made in order to be able to
accurately model the interactions between trainees.
The core data contained in the student model has
been complemented with information concerning the
quantity and characteristics of the interactions
detected between trainees. This data is gathered by
the tutor by means of a loose monitoring of the
interaction patterns coupled with a surface level
analysis of the messages contents.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
42
The tutor will be active by its own initiative only
if it detects a clear imbalance in the discussion
process. It may be called to step in though by the
trainees themselves, if they agree on a course of
action or if they find themselves in an impasse
situation. In the first case, the tutor will use the
knowledge contained in the CBM module to
evaluate the divergent proposals. In the later case, it
will combine the constraint satisfaction data
previously gathered with procedural knowledge
containing the sequence of the specific restoration
plan, in order to issue recommendations about the
next step to fulfil.
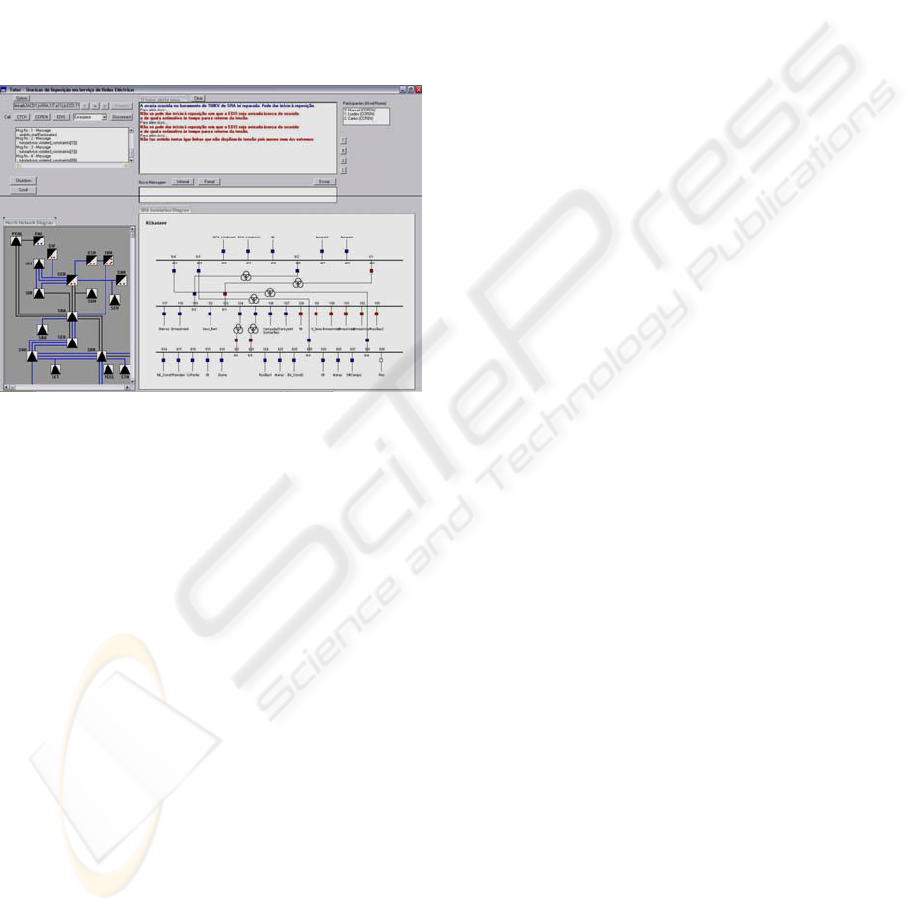
Figure 7: CoopTutor Interface.
The general aspect of the ITS interface is shown
in Figure 7.
4 CONCLUSIONS
This paper described how an Intelligent Tutoring
System can be used for the training of Power
Systems Control Centre operators in two main tasks:
Incident Analysis and Diagnosis; and Service
Restoration. Several Artificial Intelligence (AI)
techniques were joined to obtain an effective
Intelligent Tutoring environment, namely: Multi-
Agent Systems, Neural Networks, Constraint-based
Modelling, Intelligent Planning, Knowledge
Representation, Expert Systems, User Modelling,
and Intelligent User Interfaces.
The developed system is used in the training of
Electrical Engineering BSc students, since the
selection of new operators is done from this kind of
students. It is also important to notice that this
environment has been selected as one of the most
important systems combining AI techniques to be
available in the “AI-50 years” Exhibition in Portugal
(Ramos, 2006), being experimented by many
undergraduate students, motivating them for the
Electrical Engineering and Computer Science fields.
Concerning the operators’ training, the most
interesting features of this environment are:
1. The connection with SPARSE, a legacy
Expert System used for Intelligent Alarm Processing
(Vale et al, 1997).
2. The use of prediction tables and different
granularity levels for fault diagnosis training.
3. The use of the model tracing technique to
capture the operator’s reasoning.
4. The development of two tools to help the
adaptation of the curriculum to the operator - one
that generates training scenarios from real cases and
another that assists in creating new scenarios.
5. The automatic assignment of the difficulty
level to the problems.
6. The identification of the operators’
knowledge acquisition factors.
7. The automatic selection of the next problem
to be presented, using Neural Networks.
8. The use of Multi-Agent Systems paradigm to
model the interaction of several operators during
system restoration.
9. The use of the Constraint-based Modelling
technique in restoration training.
10. The availability of an Intelligent User
Interface in the interaction with the operator.
ACKNOWLEDGEMENTS
The authors would like to thank FCT foundation and
FEDER, PEDIP, POSI, POSC, and PTDC
programmes for their support in several research
projects leading to the development of the work
described here.
REFERENCES
Anderson, J., Corbett, A., Koedinger, K., and Pelletier, R.,
“Cognitive Tutors: Lessons Learned”, The Journal of
the Learning Sciences, v. 4, no. 2, pp. 167-207, 1995
Faria, L., Vale, Z., Ramos, C., Silva, A, and Marques, A.,
“Training Scenarios Generation Tools for an ITS to
Control Center Operators”, Proc. Intelligent Tutoring
Systems Conf. (ITS’2000).
Faria, L., Vale, Z., Ramos, C., “Diagnostic Tasks Training
Based on a Model Tracing Approach”, International
Journal of Engineering Intelligent Systems for
Electrical Engineering & Communications (CRL), v.
13, no. 4, pp. 223-230, 2005.
AN INTELLIGENT TUTORING SYSTEM FOR OPERATORS’ TRAINING IN POWER SYSTEM CONTROL
CENTRES
43

Jennings, N., and Wooldridge, M., “Applying agent
technology”, Applied Artificial Intelligence: An
International Journal, Taylor & Francis London, 9 (4)
1995, 351-361
Ohlsson, S., “Constraint-Based Student Modeling”,
Student Modeling: the Key to Individualized
Knowledge-based Instruction, Greer and McCalla,
Editors, Springer-Verlag, 1993, 167-189.
Praça, I., Ramos, C., Vale, Z., and Cordeiro, M.,
“MASCEM: A Multiagent System That Simulates
Competitive Electricity Markets”, IEEE Intelligent
Systems- Special Issue on Agents and Markets, 18(6),
pp. 54-60, 2003.
Ramos, C., “How Portugal Celebrated AI’s 50th
Anniversary”, IEEE Intelligent Systems, 21(4), pp. 86-
88, 2006.
Sforna, M., Bertanza, V., “Restoration Testing and
Training in Italian ISO”, IEEE Transactions on Power
Systems, November 2002, vol 17, No 4
Silva, A., Vale, Z., Ramos, C., "Cooperative Training of
Power Systems Restoration Techniques", 13rd
International Conference on Intelligent Systems
Applications to Power Systems, Washington,
November 2005.
Vale, Z., Moura, A., Fernandes, M., Marques, A., Rosado,
A. and Ramos, C., “SPARSE: An Intelligent Alarm
Processor and Operator Assistant”, IEEE Expert-
Special Track on AI Applications in the Electric
Power Industry, 12(3), pp. 86- 93, 1997.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
44
