
INTELLIGENT TILES
Putting Situated Multi-Agents Models in Real World
Nicolas P
´
epin, Olivier Simonin and Franc¸ois Charpillet
INRIA Project-Team Maia, Loria, Campus Scientifique - BP 239, 54506 Vandoeuvre-l
`
es-Nancy Cedex, France
Keywords:
Situated multi-agent models, Intelligent tiles, Perception, Communication, Mobile robots.
Abstract:
In this paper we propose to pave indoor floors with “communicating” tiles in order to extend perception and
communication of mobile agents and more generally to implement environment-based multi-agent models.
Each tile supports a real-time process which ensures communication with its neighbours and any agent laid on
it. We details algorithms required for tiles to interact with mobile agents and to carry out distributed processes.
Then we apply our approach to a behavior-based model, by splitting the model into the tiles and a simple agent.
We show this new version is equivalent to the original one and so discuss its advantages.
1 INTRODUCTION
Future factories, homes and public places will be
inhabited by people and autonomous mobile robots
working or helping them, see e.g. (Guizzo, 2008).
This population of independent individuals will need
to efficiently navigate (avoid collisions, block) and
communicate with distant systems or persons. To-
day such facilities could be achieved using wireless
communications and vision-centred navigation. How-
ever, ensuring a lot of wireless communications with-
out interferences or faults remains hard (Zhou et al.,
2004). Robots’ navigation is also limited when us-
ing camera vision and global positioning systems, due
to the presence of obstacles, walls and individuals.
Moreover, global positioning is difficult to perform
inside buildings, even when it is connected to wire-
less networks. In this paper we tackle such chal-
lenges by considering another way for communica-
tion and navigation of agents. As it is currently used
by living systems, we suggest to exploit the physi-
cal environment as a medium for communication and
cooperation between agents (Beckers et al., 1994).
This approach is well known in social insects self-
organisation, where e.g. the environment is marked
with pheromones (Parunak, 1997).
In order to extend agent abilities and to imple-
ment environment-based algorithms, we propose to
pave indoor floors with communicating tiles. Each
tile is defined to ensure communication with its adja-
cent neighbours, and to store simple information that
can be read/write by an agent laid on the tile. As a
consequence tiles can be exploited to extend agents’
perceptions and communications (of human or robot),
and to simplify agent model by computing parts of the
algorithms. Finally, this distributed support aims at
physically implement bio-inspired algorithms.
The paper is organised as follows. Section 2 dis-
cusses the requirements for an intelligent floor, and
the consequences on tile definition. Then in Sec-
tion 3 we define a generic tile model. In Section 4
we show how a model dedicated to multi-robot navi-
gation, the Satisfaction-Altruism model (Simonin and
Ferber, 2000), can be partially translated to the tiles.
Finally Section 5 concludes the paper.
2 INTELLIGENT
ENVIRONMENTS FOR
SITUATED AGENTS
Transmitting information through the environment is
a common approach in reactive multi-agents systems.
We can quote digital pheromone techniques (Parunak,
1997), potential field computation and cellular au-
tomata based environment. In some deliberative mod-
els, a discrete environment representation may be
also used, e.g. for path planning or for Markov De-
cision Process models. In both reactive and delib-
erative approaches, implementing such algorithms in
the real world remains a challenge. In the first case,
robots/agents cannot directly read/write information
on the floor. In the second case, deliberative agents
513
Pépin N., Simonin O. and Charpillet F. (2009).
INTELLIGENT TILES - Putting Situated Multi-Agents Models in Real World.
In Proceedings of the International Conference on Agents and Artificial Intelligence, pages 513-519
DOI: 10.5220/0001661805130519
Copyright
c
SciTePress

have to build a map of the environment, locate them-
selves accurately and share their map with others
agents.
So, augmenting the environment with a concrete
grid can provide a flexible and smart way to deploy
or extend these algorithms. We now examine which
kind of technology/network could be envisaged.
Computing and communicating through a grid has
become a common idea, but such projects as the
GRID one (Foster et al., 2001) consider large net-
works of computers. The scale of such networks is
not adapted to our problem, in particular we just need
to connect simple mote-like nodes (Polastre et al.,
2004). In the domain of surveillance, we assist to
the development of sensor networks. They consist in
a myriad of simple sensors or nodes deployed in the
environment. Such an approach seems more adapted
to define a fine-grained network for providing com-
munication and perceptions to agents. For instance
(Mamei and Zambonelli, 2007) proposed to use sen-
sor network and RF-ID based infrastructures to per-
form physical object tracking. We can note this ap-
proach relies on wireless technology, having draw-
backs pointed in the introduction. Moreover nodes
remain fragile to the traffic of the robots and people.
This analysis led us to imagine a particular net-
work adapted to indoor environments. It consists in
physically connecting a set of mote-like nodes, which
have to be positioned regularly as a grid and inte-
grated inside the floor. In practice, we envisage to
design these nodes as tiles to pave the floor, that natu-
rally ensures a regular organisation. This should ease
the interaction between agents and the nodes, which
can be physical (sensors, contact) or wireless (radio,
light, etc.).
As in the majority of discrete models, we consider
that the tiles are identical with a squared topology.
Their size must be adapted to support just one per-
son or one robot at once. Figure 1a simply illustrates
such a paved environment.
Figure 1: (a) Example of a tiled environment. (b) Represen-
tation of communications between tiles and agent.
3 DEFINITION OF THE TILES
3.1 General Features
We define a tile as an autonomous, reactive and com-
municating entity. It may exchange messages with a
carried agent, and with the neighbouring connected
tiles (Figure 1b). In the model’s adaptation we have
in sight, we choose to limit the neighbourhood to 4
tiles.
Features of a Tile:
• a (limited) memory to store information,
• communication links with the neighbouring tiles,
• ability to support one and only one agent and to
communicate with it (wireless or contact link),
• a main process answering to requests from the
agent and the neighbouring tiles,
• an internal clock allowing to date operations,
• optionally other processes which can send mes-
sages to the main process.
Hypotheses on Tiles:
• tiles are independent processes (no scheduling is
supposed),
• tiles processes do not require to be synchronised,
• tile’s main process routines do not use blocking
operations.
We now details in the following subsections algo-
rithms and structures needed to enable in a tile the
features just above-mentioned. In particular we define
tile to tile communication, interaction between mo-
bile agents and tiles, and mechanisms allowing tiles
to perceive and spread information.
3.2 Tile’s Process, Data and
Communication
Tile Main Process. Our approach do not define tiles
as agents because they have no proper objective (they
are not proactive). Each tile is reactive and based on a
main process which consists in an infinite loop treat-
ing incoming messages. The main process’ form is as
follow:
ICAART 2009 - International Conference on Agents and Artificial Intelligence
514

Algorithm 1: General tile definition.
while true
if request R in queue then
switch descriptor of R
case descriptor_1:
instructions
case descriptor_2:
// Example:
for i in {N,S,E,W}
send message to Tile(i)
...
end switch
end if
end while
The tiles are designed to store received messages in
a FIFO queue and treat them as they come. The
messages’ treatment is organised as a set of different
cases, and each type of message is treated according
to a message descriptor (see Message formalism be-
low). These treatments must not contain any block-
ing operation, as we want the tiles to be able to an-
swer agent’s requests in real time. We envisage op-
tional processes, that can communicate with the main
one, in order to add pro-activity to the tiles. These
processes can manage time based or blocking oper-
ations without interfering with the main process. For
instance, such a process could allow a pheromone dif-
fusion at a fixed frequency.
Stored Data. To limit energy consumption we re-
duce stored data as much as possible. In particular,
information about other tiles is limited to one small
set of data per adjacent direction. In the Section 4 ap-
plication, each set contains a description of the tile’s
direct neighbourhood.
Connexions between Tiles. We consider that
neighbouring tiles are only known and addressed
through their relative direction to the current tile:
{N, S, E,W } = C (in a 4-connexity model).
Information on the neighbourhood is stored in a
tile as a 4 elements vector named D.
We note D(dir) the stored information in the dir
direction.
Message Formalism. We define all messages as
descriptor(dir, arg2, . . .). descriptor reports the na-
ture of the transmitted information, in order to iden-
tify the answer to carry out. When dir is precised, it
represents the direction the message describes, i.e. an
information concerning an adjacent tile (dir ∈ C ).
Other values are the information itself. We consider
the direction and the information values as optional,
Figure 2: Resolution of the concurrent access problem.
some messages only needing a descriptor to inform
the receptor.
In the rest of the article we add to the descriptors’
names A or T to clearly differentiate messages be-
tween a mobile agent and a tile and messages between
two tiles. The following example shows an answer to
an agent’s perception request (from section 4):
description A(N,agent), description A(S,nothing),
description A(E,empty Tile), description A(W,agent),
max signal A(N, -59).
3.3 Interactions with a Mobile Agent
Managing Concurrent Access. From the tiles
point of view, robots displacements are always dis-
crete, whether agents have discrete moves or not. To
ensure that two agents don’t move onto the same tile
at the same time, it is necessary to set up a local reser-
vation mechanism to grant a tile access to only one
agent. Moreover, such mechanism must be simple
and must not require a “global” supervisory control.
Before moving to a target tile the agent ask to the one
supporting it the permission to move. This tile then
transfers the request to the target tile. If the latter is
free of agent and of other running reservation request,
it grants the access, saves reservation time and then
does not accept anymore reservation until the agent
arrives (and notice it) or a timeout on the reservation
expires.
Figure 2 illustrates the Concurrent access algo-
rithm presented below. Both agents Ag
1
and Ag
2
want
to go on tile T
3
at the same time t. They both send a
reservation request (reserv T), through their own tile
to T
3
. As T
3
is empty, one request can be accepted. As
unprocessed messages are stored in a single queue,
one of the two reservation is processed first and the
request is accepted, while the second is discarded.
When a request is accepted (granted), the tile stores
a time stamp (rsv stamp) corresponding to the ac-
ceptation time. If the agent does not arrive, the next
reservation will be possible after the timeout delay.
INTELLIGENT TILES - Putting Situated Multi-Agents Models in Real World
515

Algorithm 2: Concurrent access.
case reserv_A(dir):
send reserv_T to Tile(dir)
case reserv_T(dir):
if tile is occupied
or (time - rsv_stamp < timeout)
then
send access_T("denied") to Tile(dir)
else
send access_T("granted") to Tile(dir)
rsv_stamp <- time
end if
case access_T(message,dir):
send access_A(message) to the Agent
In algorithms, dir always represents a direction from
the current tile’s point of view.
As we consider that this process occurs each time
a displacement is performed, it will not be presented
again in the following algorithms.
Updating Tile Information. From the tiles’ point
of view, it is necessary they know whether a mobile
agent arrives or leaves it. We employ “active” iden-
tification through agent’s messages. Thus we define
two specific message’s descriptors: arriving A and
leaving A. Their implementation is detailed in the
next subsection. Another practical solution could be
tiles that detect automatically movements using sen-
sors. The former solution is more reliable because it
makes sure that nothing but agents can be detected.
Agent’s Local Perception. When an agent needs
to know the state of the neighbouring tiles it sends a
perception A message to its supporting tile. The tile
answers with a series of messages description A
describing the tiles in each direction dir. Tile’s al-
gorithm 1 is completed with:
case perception_A:
for dir in {N,S,E,W}
if sense(dir,isTile)
and D(dir) = "no tile"
D(dir) <- "tile"
else if sense(dir,isNotTile)
D(dir) <- "no tile"
end if
send description_A(dir,D(dir))to agent
end for
The sense function tests the existence of a tile in a
given direction by checking the physical connexion.
It is used to update D, the representation of the local
neighbourhood.
3.4 Tile’s Perception
Collecting vs. Diffusing. There are two ways for
the tile to perform a perception process.
1. If we stay centred on the agent, the perception
process is started when the agent requests it. Then
the tile asks its neighbours information using a
bidirectional communication process.
2. We can also imagine that the process of informa-
tion could be done when an event occurs, e.g. if an
agent arrives on a tile, the latter notify its neigh-
bours. We refer to this process as diffusion, be-
cause it doesn’t require an answer from the in-
formed tile.
We adopt this second solution as it is not centred
on the requesting agent. Moreover this one has just to
read D when needing the information.
The mechanism consists, first, to diffuse the
events arriving A and leaving A to neighbouring
tiles with the descriptive messages description T:
case arriving_A:
for dir in {N,S,E,W}
send description_T("agent")
to Tile(dir)
end for
case leaving_A:
for dir in {N,S,E,W}
send description_T("empty")
to Tile(dir)
end for
Second, the neighbouring tiles store the transmitted
information in their local representation:
case description_T(dir,info):
D(dir) <- info
Example. Figure 3 illustrates a diffusion process,
where an agent (A) moves onto a tile, has its presence
diffused to the neighbourhood, requests a perception
and then moves again. The diffusion process occurs
on steps 1 and 4 when the agent notifies a change in
its state to the tile, e.g. when it arrives or leaves it (the
large arrows represent the description T messages)
It is necessary to differentiate the diffusion pro-
cess (steps 1 & 4) from the neighbourhood sensing
(step 3) that identifies changes in the local environ-
ment. The latter can be achieved by testing the physi-
cal link between two tiles.
Note that all communication processes cannot be
implemented following the diffusion approach. It is
the case for the concurrent access mechanism pro-
posed in Section 3.3.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
516
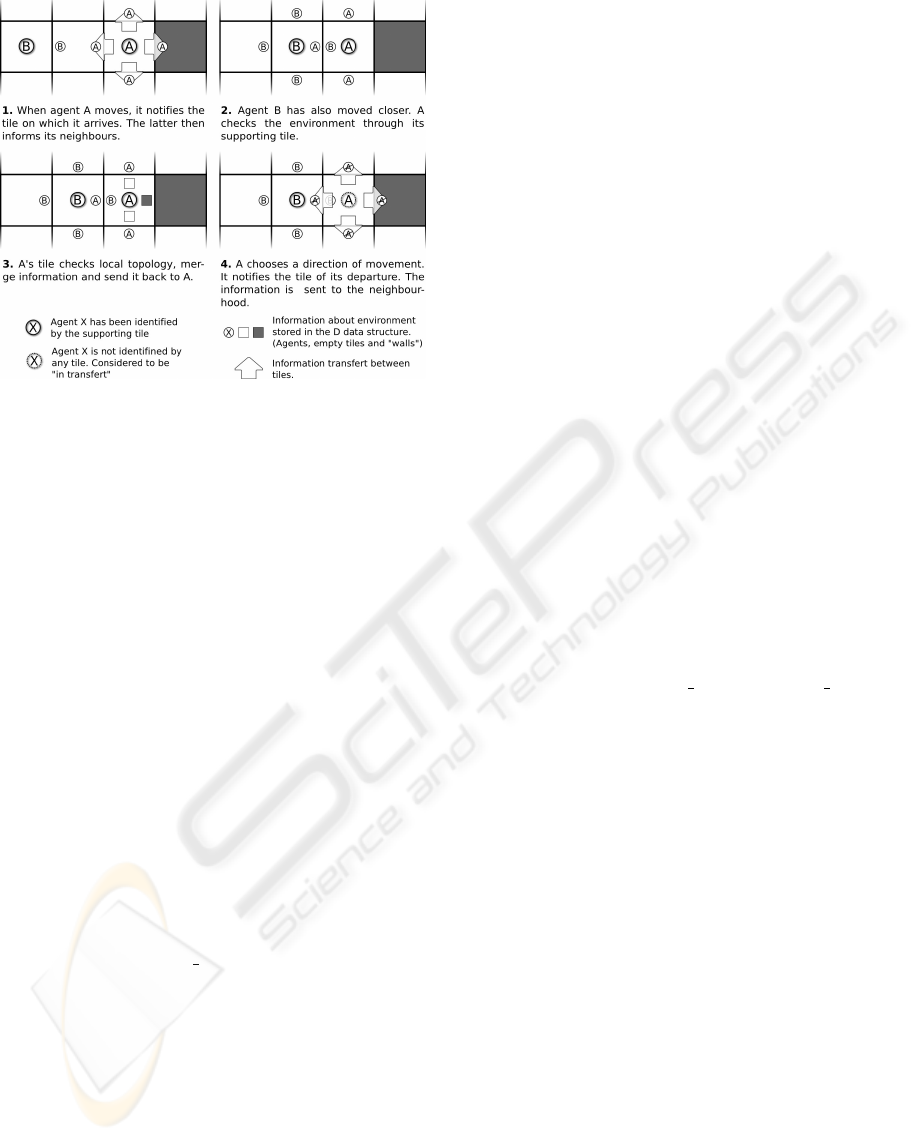
Figure 3: Diffusion mechanism of information using com-
munications between tiles.
3.5 Spreading Information
The diffusion model is natural to use when tiles have
to spread information in the environment. Indeed, a
point-to-point communication would be less robust to
possible failures. Reactive models make often use of
a diffusion mechanism, e.g. numerical gradient, sig-
nals, etc. The tile model we propose allows this fea-
ture.
The principle of the diffusion process is defined in
the following algorithm:
case descriptor_T(dir, nb_hops):
(...)
if nb_hops > 0 then
for d in {N,S,E,W} - {dir}
send descriptor_T(nb_hops -1) to d
end for
end if
When a tile receives a descriptive message from a
neighbouring tile, it has the possibility to diffuse it to
its other neighbours. nb hops is initialised to a value
corresponding to the desired diffusion radius when
the propagation starts.
Such a mechanism can however be extended, if we
need the message to be communicated only once to
each tile. In this case, the message must be identified
uniquely.
4 APPLICATION TO THE
SATISFACTION-ALTRUISM
MODEL
The Satisfaction-Altruism model (Simonin and Fer-
ber, 2000), noted Sat-Alt, is designed for cooperation
between situated agents. In this paper, we focus on
spatial conflicts resolution in unknown and strained
environments.
4.1 The Sat-Alt Model
We present the Sat-Alt model for grid environments,
where agents move, communicate and perceive on
their four neighbouring cells.
To achieve its current task, each agent can switch
among two states: the normal state and the altruist
one. In the former, it follows its own goals while in
the latter it tries to satisfy another agent. To switch
between states, agents are able to compute a level of
satisfaction P(t). This value is peculiar to each agent
and vary depending on the level of constraint sensed
by the agent:
• P(t + 1) = P(t) + v
p
•
v
P
=
−(coe f
wall
.nb walls + coe f
ag
.nb agents)
if unable to move
cste > 0 otherwise
If the agent is blocked in its progression, the level
of satisfaction decreases according to the number of
walls and other agents perceived in the local area.
On the contrary, if it can move, this level increases
at a constant rate. The overall level is limited in
] − P
max
, P
max
[ and when P(t) is negative, the agent
is considered unsatisfied.
Agents can emit their satisfaction values as sig-
nals noted I. In reception they can select the one with
the lowest value, noted I
ext
. Each time an agent up-
dates its perceptions it performs the test of altruism
I
ext
< (0, P, I) which compares the sensed signal car-
rying the lowest satisfaction to its own satisfaction
and its own signal. If it is lower than all of them,
the agent switches to the altruist state. In this state,
it tries to flee the agent emitting the most unsatisfied
signal, i.e. to move to any free area.
The principle used to solve a conflict consists
in propagating dissatisfaction signals (negative ones)
from the most dissatisfied agents to their neighbours.
This principle is defined in the following algorithm.
INTELLIGENT TILES - Putting Situated Multi-Agents Models in Real World
517
Algorithm 3: Sat-Alt Agent.
perception of neighbourhood
perception of obstructing agents
I_ext <- max(ext signals)
P <- P + vp
if I_ext < (0,I,P) then
altruist <- true
compute fleeing_dir
else compute goal direction
if not altruist and P < 0 then I <- P
else if altruist and I_ext<I then I<-I_ext
else if no obstructing agents then I <- 0
emits I
if agent can move then move()
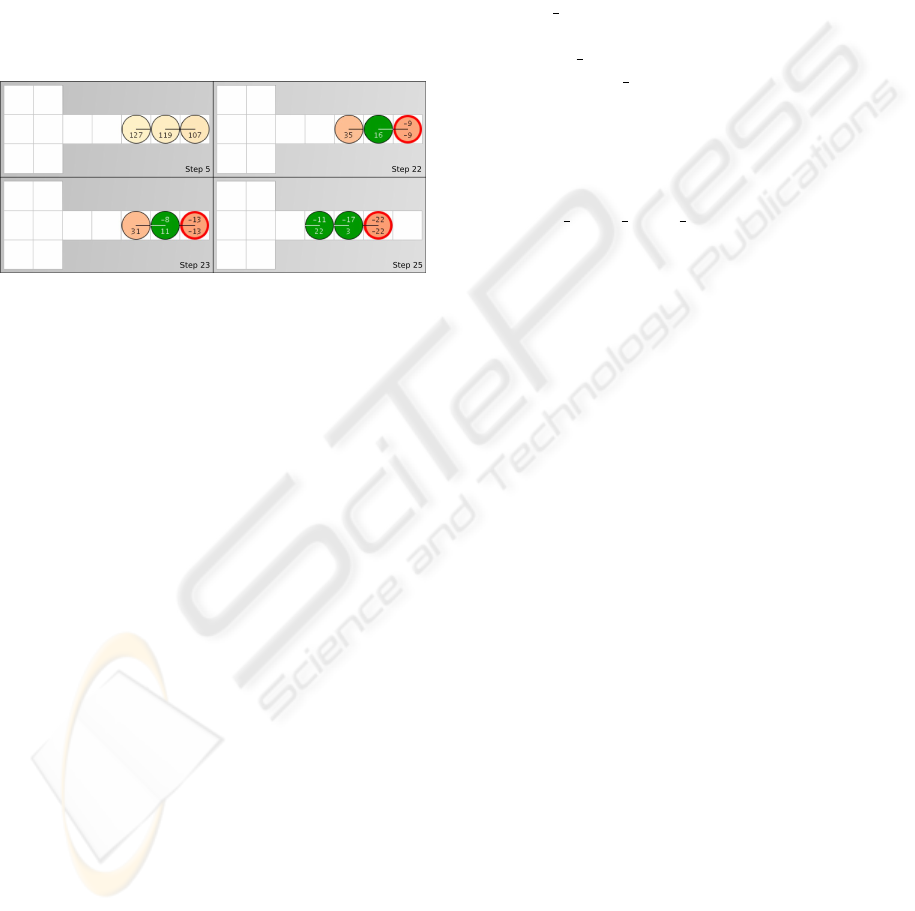
Figure 4: Illustration of the dead-end problem’s resolution
by the Satisfaction-Altruism. model. The bottom value is
the personal satisfaction, the top one an emitted signal and
the line shows the current direction. Agents in the altruist
state are drawn in dark-grey (green) colour. Otherwise, the
higher is personal satisfaction, the lighter is the colour.
To always emit and relay the highest dissatisfaction,
signal values are updated as soon as P(t) or I
ext
go
down. This allows to unlock situations where several
blocked agents emit their dissatisfaction. Finally, an
agent continues to emit a signal while it perceives an
obstructing agent.
Figure 4 illustrates this principle on a corridor explo-
ration. Initially at step 1, three agents enter in a nar-
row corridor. Their personal satisfaction is maximal
(127). Blocked by the dead-end (step 5), the first ar-
rived agent tries to escape. Then its direction is op-
posed to the two others. All agents satisfaction has
fallen at step 22 and first agent starts to emit a dissat-
isfaction signal. Then its neighbour switches to the
altruist state. At the next step the latter agent has
changed its direction and start to emit the last dis-
satisfaction he has received. As a consequence the
third agent also switches to the altruist state. Then
all agents are oriented in the same direction and can
escape the dead-end.
4.2 Splitting Sat-Alt into Agents and
Tiles
What is changing when splitting the Satisfaction-
Altruism model into agents and tiles? The core of
the model – computation of the satisfaction, decision
taking and movement – is still under control of the
mobile agents. But effective perception and emission
modules, and the responsibility to diffuse signals and
collect data is now supported by the tiles.
Sat-Alt Tile Model. Tiles have to carry out percep-
tions and communications required by the model.
Concerning communications, we extended the
arriving A message for the tile to be informed
also of the agent signal, and renamed the descrip-
tor as state A(I). To reach other agents, tiles dif-
fuse description T("agent",I) messages to their
neighbours. Each tile stores presence information in
D plus signals information about their neighbourhood
in a similar vector S.
Tile’s perception is now in charge of the compu-
tation of I
ext
value, which is communicated with a
maxsignal A(dir ext,I ext) message.
Algorithm 4: Sat-Alt Tiles.
case state_A(I):
for dir in {N,S,E,W}
send description_T("agent",I) to Tile(dir)
case leaving_A:
(...)
case description_T(dir,type,signal):
D(dir) <- type
if type = "agent" then S(dir) <- signal
else S(dir) <- null
case perception_A:
(...) cf. Section 3.3
(I_ext,dir_ext) <- max(S)
send maxsignal_A(dir_ext,I_ext) to agent
send endoftransmission to agent
New Agent Model. From the previous tiles defini-
tion, we can define the new Sat-Alt agent algorithm.
One can see that perceptions and emissions of signals
are now implemented using only a few instructions.
Algorithm 5: New Sat-Alt Agent.
Algorithm 5: New Sat-Alt Agent
send perception_A to Tile
waiting for {
description_A(dir1,desc1), ...,
description_A(dir4,desc4),
maxsignal_A(dir,I_ext),
endoftransmission
}
P <- P + vp
if I_ext < (0,I,P) then (...)
if agent can move then
send leaving_A to Tile
move()
end if
send state_A(I) to Tile
ICAART 2009 - International Conference on Agents and Artificial Intelligence
518

4.3 Simulation and Validation
In order to compare the original Sat-Alt model and
the new one using tiles, we have developed simula-
tors based on the Turtlekit framework
1
(Michel et al.,
2005), which is dedicated to reactive multi-agent sys-
tems simulation.
Tiles and mobile agents have been implemented
in independent processes. As tiles implement only
not blocking short processes they answer in real-time
compared to the mobile agent actions. The average
frequency of the Turtlekit scheduler is very low com-
pared to the tile’s one.
Our objective was to validate the rewriting of the
original Sat-Alt in the tiles-based model. Our ap-
proach consists in comparing executions with both
models starting from the same initial state (same
agents and environment). To allow the comparison,
we biased random computation by always using the
same seed as the Turtlekit agents scheduling is fixed.
Indeed, some displacements may use random choices,
for instance when two fleeing directions are equiva-
lent. Then we checked that agents have the same evo-
lution in both simulations using the different models.
We performed simulations with 11 agents explor-
ing a 9x9 map composed of rooms and corridors. We
compared logs of both models execution, i.e. com-
paring agents position, orientation, satisfaction value
and signal value, to detect differences. Up to thou-
sand steps, we did not see any difference between the
two models. This result was obtained by setting the
TurtleKit time step at 0.5s.
This first empirical validation showed the equiv-
alence of both models. However the tiles based
model introduces interesting properties as it sepa-
rates agents’ decision from perception and commu-
nication mechanisms. It first allows to have a high
frequency to perform perceptions and distributed pro-
cesses through the environment. It also provides to
agents new way of communication, as the diffusion
approach used in our case study.
5 CONCLUSIONS
In order to extend robots’ perception and communi-
cation we proposed to pave indoor floors with com-
municating tiles, each one being able to communicate
only with its neighbouring tiles and a mobile agent.
We shown that diffusing and collecting information
can then be managed by the tiles through local and
recursive mechanisms. We defined each tile as a real-
time autonomous process and as simple as possible
1
http://www.madkit.net
to limit time computation and energy consumption.
We illustrated the interest of the approach by splitting
the Satisfaction-Altruism model into tiles and a sim-
ple agent behaviour. Experiments shown the equiv-
alence of both models, where tiles have the advan-
tage to manage communication and perception inde-
pendently of the agent activity.
Concerning future work, we started to study the
electronic implementation of the tiles, by considering
Mote technology, to carry out some experiments. We
also plan to continue the study of the model, by eval-
uating algorithm complexity and robustness.
REFERENCES
Beckers, R., Holland, O., and Deneubourg, J.-L. (1994).
From local actions to global tasks: stigmergy and col-
lective robotics. In Artificial Life IV: Proc. of the 4th
Int. Workshop on the synthesis and the simulation of
living systems, third edition, MIT Press.
Foster, I., Kesselman, C., and Tuecke, S. (2001). The
anatomy of the Grid: enabling scalable virtual organi-
zations. Supercomputer Applications, 15(3):200–222.
Guizzo, E. (2008). Three Engineers, Hundreds of
Robots, One Warehouse. In IEEE Spectrum online,
http://www.spectrum.ieee.org/jul08/6380.
Mamei, M. and Zambonelli, F. (2007). Pervasive
pheromone-based interaction with RFID tags. ACM
Trans. Auton. Adapt. Syst., 2(2):4.
Michel, F., Beurier, G., and Ferber, J. (2005). The TurtleKit
Simulation Platform: Application to Complex Sys-
tems. In Proceedings of the Workshops Sessions at the
1st International Conference on Signal & Image Tech-
nology and Internet-Based Systems (IEEE SITIS05),
pages 122–128.
Parunak, H. V. D. (1997). Go to the Ant: Engineering Prin-
ciples from Natural Agent Systems. Annals of Opera-
tions Research.
Polastre, J., Szewczyk, R., Sharp, C., and Culler, D. (2004).
The Mote Revolution: Low Power Wireless Sensor
Network Devices. In Hot Chips 2004.
Simonin, O. and Ferber, J. (2000). Modeling self satisfac-
tion and altruism to handle action selection and reac-
tive cooperation. In In The Sixth International Con-
ference on the Simulation of Adaptative Behavior.
Zhou, G., He, T., Krishnamurthy, S., and Stankovic, J.
(2004). Impact of Radio Irregularity on Wireless Sen-
sor Networks. In The 2
nd
Int. conf. on Mobile Systems,
Applications, and Services MobiSYS’ 04, pages 125–
138.
INTELLIGENT TILES - Putting Situated Multi-Agents Models in Real World
519
