LEARNING USER INTENTIONS IN SPOKEN DIALOGUE SYSTEMS
Hamid R. Chinaei, Brahim Chaib-draa
Computer Science and Software Engineering Department, Laval University, Quebec, Canada
Luc Lamontagne
Computer Science and Software Engineering Department, Laval University, Quebec, Canada
Keywords:
Learning, Spoken Dialogue Systems.
Abstract:
A common problem in spoken dialogue systems is finding the intention of the user. This problem deals with
obtaining one or several topics for each transcribed, possibly noisy, sentence of the user. In this work, we apply
the recent unsupervised learning method, Hidden Topic Markov Models (HTMM), for finding the intention of
the user in dialogues. This technique combines two methods of Latent Dirichlet Allocation (LDA) and Hidden
Markov Model (HMM) in order to learn topics of documents. We show that HTMM can be also used for
obtaining intentions for the noisy transcribed sentences of the user in spoken dialogue systems. We argue that
in this way we can learn possible states in a speech domain which can be used in the design stage of its spoken
dialogue system. Furthermore, we discuss that the learned model can be augmented and used in a POMDP
(Partially Observable Markov Decision Process) dialogue manager of the spoken dialogue system.
1 INTRODUCTION
Spoken dialogue systems are systems which help
users achieve their goals via speech communication.
The dialogue manager of a spoken dialogue system
should maintain an efficient and natural conversation
with the user. The role of a dialogue manager is to
interpret the user’s dialogue accurately and decides
what the best action is to effectively satisfy the user
intention. So, the dialogue manager of a spoken dia-
logue system is an agent that may have a personality
(Walker et al., 1997). Examples of dialogue agents are
a flight agent assisting the caller to book a flight ticket,
a wheelchair directed by her patient, etc. (Williams
and Young, 2007; Doshi and Roy, 2007). However,
these agents have some sources of uncertainly due
to automatic speech recognition and natural language
understanding.
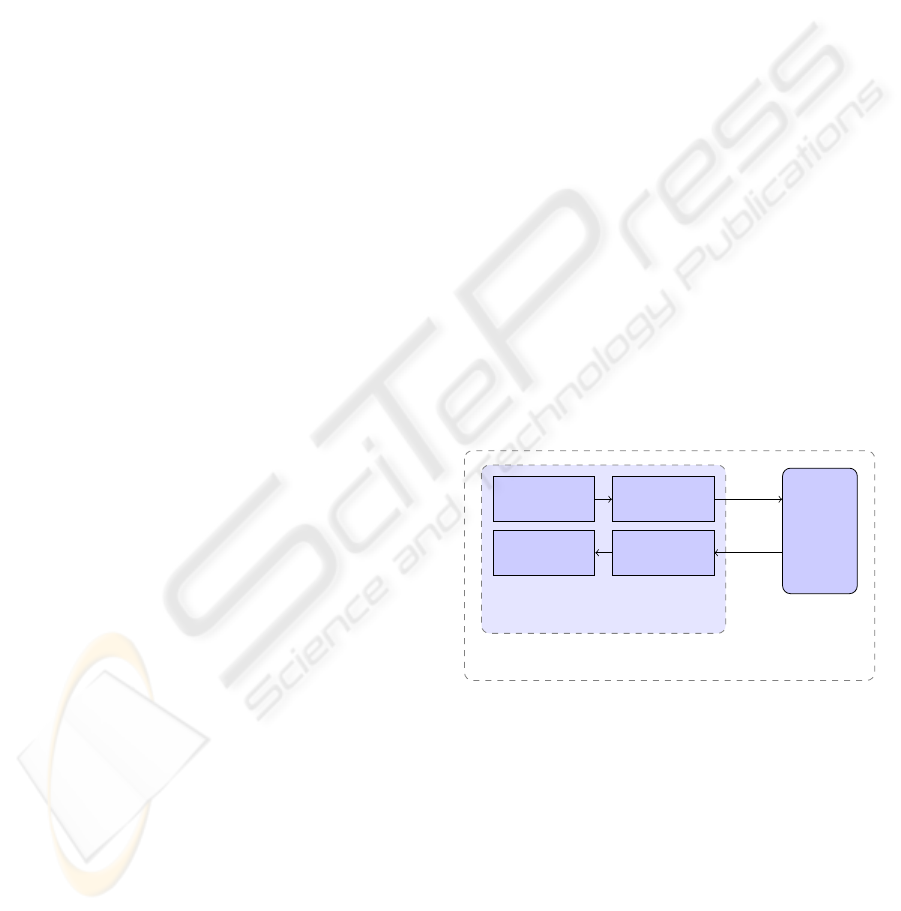
Figure 1 shows the architecture of a Spoken Dia-
logue System (SDS). The Automatic Speech Recog-
nition (ASR) component receives the user’s utterance
(which can be a sequence of sentences) in the form of
speech signals, and converts it to a sequence of tran-
scribed noisy words. The Natural Language Under-
standing (NLU) component receives the transcribed
Dialogue
Agent
NLU
NLG
ASR
TTS
O
A
Word Level
Speech Level
SDS
Figure 1: The architecture of a spoken dialogue system.
noisy words, and generates the possible intentions
that the user could mean. The dialogue agent may re-
ceive the generated intentions with a confidence score
as observation O since the output generated by Auto-
matic Speech Recognition and Natural Language Un-
derstanding may consist of some uncertainty in the
system. Based on observation O, the dialogue agent
generates the action A, an input for Natural Language
Generator (NLG) and Text-to-Speech (TTS) compo-
nents.
Learning the intention of the user is crucial for
design of a robust dialogue agent. Recent methods
of design of dialogue agent rely on Markov Decision
107
R. Chinaei H., Chaib-draa B. and Lamontagne L. (2009).
LEARNING USER INTENTIONS IN SPOKEN DIALOGUE SYSTEMS.
In Proceedings of the International Conference on Agents and Artificial Intelligence, pages 107-114
DOI: 10.5220/0001663801070114
Copyright
c
SciTePress
Process (MDP) framework. The basic assumption in
MDPs is that the current state and action of the sys-
tem determine the next state of the system (Markovian
property). Partially Observable MDPs (or in short
POMDPs) have been shown that are proper candi-
dates for modeling dialogue agents (Williams et al.,
2005; Doshi and Roy, 2007). POMDPs are used in
the domains where in addition to the Markovian prop-
erty, the environment is only partially observable for
the agent; which it is the case in spoken dialogue sys-
tems.
Consider the following example taken from
SACTI-II data set of dialogues (Weilhammer et al.,
2004). SACTI stands for Simulated ASR-Channel:
Tourist Information. Table 1 shows a sample dialogue
in this corpus. The agent’s observations are shown in
braces. As the example shows, because of the speech
recognition errors, each utterance of the user is cor-
rupted. In POMDP framework, the user utterance can
be seen as the agent’s observation. And, one prob-
lem for the agent would be obtaining the user inten-
tion based on the user utterance, i.e. the agent par-
tial observations. Without loss of generality, we can
consider the user intention as the agent’s state (Doshi
and Roy, 2007). For instance, states could be: ask
information about restaurants, hotels, bars, etc. The
system observations could be the same as the states
in the simplest case, and in more complex cases any
word that can represent the states.
Thus, the problem would be estimating the inten-
tion of the user given the user utterance as the agent’s
observations. This can be seen as a typical problem in
POMDPs, i.e. learning the observation model. In fact,
capturing the intention of user is analogous to learn-
ing observation model in POMDPs and that the inten-
tion is analogues to the system’s state in each turn of
dialogue.
Blei and Moreno (2001) used aspect Hidden
Markov Models for learning topics in texts. Their ex-
perimental result shows that their method is also ap-
plicable to noisy transcribed spoken dialogues. How-
ever, they assumed that the sequence of utterances is
drawn from one topic and there is no notion of mix-
ture of topics. Gruber et al. (2007) introduced Hidden
Topic Markov Model (HTMM), in order to be able to
introduce mixture of topics similar to PLSA (Proba-
bilistic Latent Semantic Analysis) model (Hofmann,
1999). PLSA maps documents and words into a se-
mantic space in which they can be compared even if
they don’t share any common words.
In this work, we observe that HTMM is a proper
model for learning intentions behind user utterances
at the word level (see Figure 1), which can be used
in particular in POMDP framework. The rest of this
Table 1: Sample dialogue from SACTI.
U1 Is there a good restaurant we can go to tonight
[Is there a good restaurant week an hour tonight]
S1 Would you like an expensive restaurant
U2 No I think we’d like a medium priced restaurant
[No I think late like uh museum price restaurant]
S2 Cheapest restaurant is eight pounds per person
U3 Can you tell me the name
[Can you tell me the name]
S3 bochka
S4 b o c h k a
U4 Thank you can you show me on the map where it is
[Thank you can you show me i’m there now where it is]
S5 It’s here
U5 Thank you
[Thank u]
U6 I would like to go to the museum first
[I would like a hour there museum first]
. . .
paper is as follows. Section 2 describes the Hidden
Topic Markov Models (Gruber et al., 2007), an un-
supervised method for learning topics in documents.
We explain the model with a focus on dialogues for
the purpose of learning user intentions. This section
also describes Expectation Maximization and forward
backward algorithm for HTMM. In Section 3, we
describe our experiment on SACTI dialogue corpus.
In Section 4, we discuss our observations followed
by conclusion and future directions on the project,
Robotic Assistant for Persons with Disabilities
1
in
Section 5.
2 HIDDEN TOPIC MARKOV
MODELS FOR DIALOGUES
Hidden Topic Markov Models (HTMM) is a method
which combines Hidden Markov Model (HMM) and
Latent Dirichlet Analysis (LDA) for obtaining some
topics for documents (Gruber et al., 2007). HMM is
a framework for obtaining the hidden states based on
some observation in Markovian domains such as part-
of-speech tagging (Church, 1988). In LDA, similar to
PLSA, the observations are explained by groups of
latent variables. For instance, if we consider observa-
tions as words in a document, then the document is
considered as bag of words with mixture of some top-
ics, where topics are represented by the words with
higher probabilities. In LDA as opposed to PLSA, the
mixture of topics are generated from a Dirichlet prior
mutual to all documents in the corpus. Since HTMM
adds the Markovian property inherited in HMM to
1
http://damas.ift.ulaval.ca/projet.en.php
ICAART 2009 - International Conference on Agents and Artificial Intelligence
108
z
1
w
1
z
2
w
2
...
ψ
2
z
|d|
w
|d|
ψ
|d|
β
η
θ
α
ε
d
D
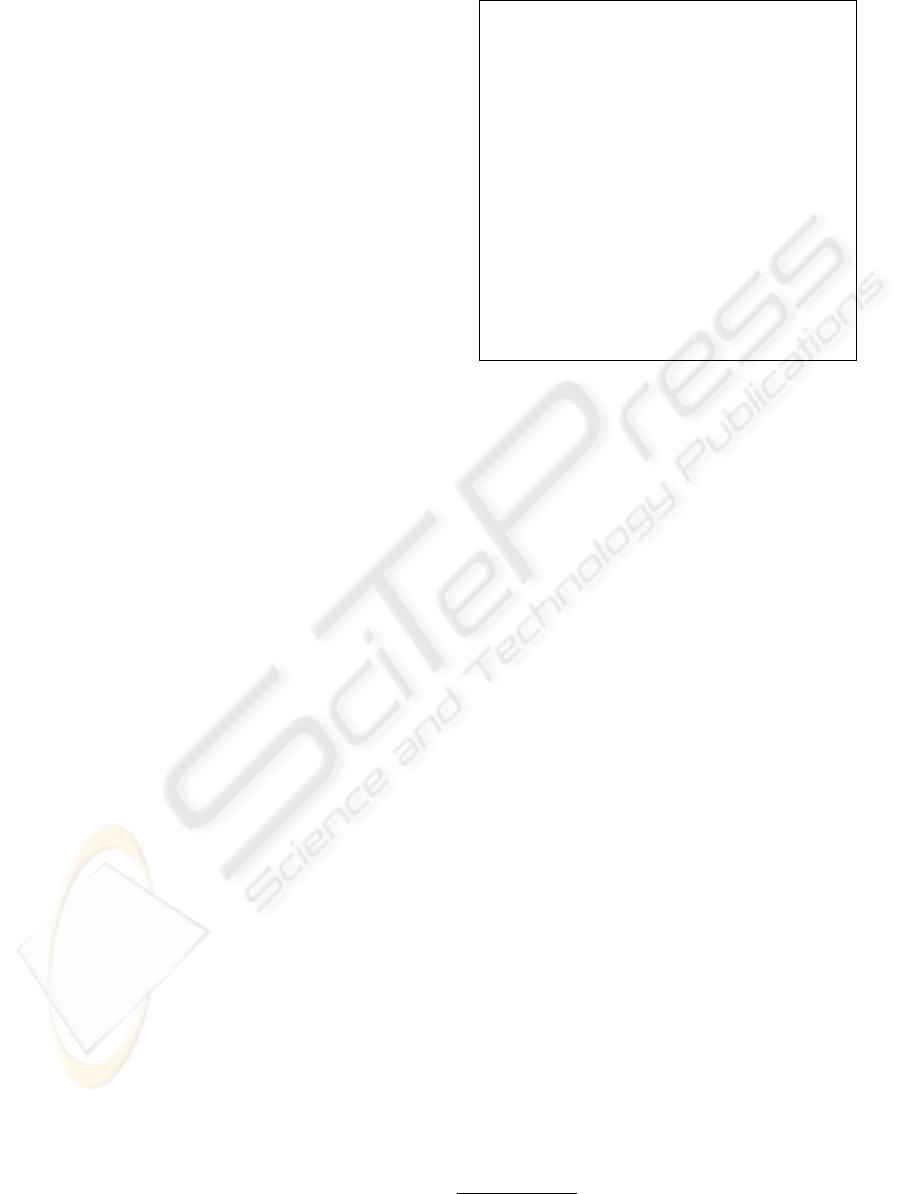
Figure 2: The HTMM model adapted from (Gruber et al.,
2007), the shaded nodes are observations (w) used to cap-
ture intentions (z).
LDA, in HTMM the dependency between successive
words is regarded, and no longer the document is seen
as bag of words.
In HTMM model, latent topics are found using
Latent Dirichlet Allocation. The topics for a docu-
ment are generated using a multinomial distribution,
defined by a vector θ. The vector θ is generated using
the Dirichlet prior α. Words for all documents in the
corpus are generated based on multinomial distribu-
tion, defined by a vector β. The vector β is generated
using the Dirichlet prior η. Figure 2 shows that the di-
alogue d in a dialogue set D can be seen as a sequence
of words (w) which are observations for some hidden
topics (z). Since hidden topics are equivalent to user
intentions in our work, from now on, we call hidden
topics as user intentions. The vector β is a global vec-
tor that ties all the dialogues in a dialogue set D, and
retains the probability of words given user intentions.
The vector θ is a local vector for each dialogue d, and
retains the probability of intentions in a dialogue.
Algorithm 1 shows the process of generating and
updating the parameters. First, for all possible user in-
tentions β is drawn using the Dirichlet prior η. Then,
for each dialogue, θ is drawn using the Dirichlet prior
α.
The parameter ψ
i
is for adding the Markovian
property in dialogues since successive sentences are
more likely to include the same user intention. The
assumption here is that a sentence represents only one
user intention, so all the words in a sentence are rep-
resentative for the same user intention. To formalize
that, the algorithm assigns ψ
i
= 1 for the first word
of a sentence, and ψ
i
= 0 for the rest. Then, the in-
tention transition is possible just when ψ = 1. This is
represented in the algorithm between lines 6 and 18.
HTMM uses Expectation Maximization (EM) and
forward backward algorithm (Rabiner, 1990), the
standard method for approximating the parameters in
HMMs. It is because of the fact that conditioned on θ
Algorithm 1: The HTMM generative algorithm
adapted from (Gruber et al., 2007).
Input: Set of transcribed dialogues D, N number of
intentions
Output: Finding intentions for D
foreach intention z in the set of N intentions do1
Draw β
z
∼ Dirichlet(η);2
end3
foreach dialogue d in D do4
Draw θ ∼ Dirichlet(α);5
foreach i = 1 . . . |d| do6
if beginning of a sentence then7
ψ
i
= bernoli(ε)8
else9
ψ
i
= 010
end11
end12
foreach i = 1 . . . |d| do13
if ψ
i
= 0 then14
z
i
= z
i−1
15
else16
z
i
= multinomial(θ)17
end18
Draw w
i
∼ multinomial(β
z
i
) ;19
end20
end21
and β, HTMM is a special case of HMMs. In HTMM,
the latent variables are user intentions z
i
and ψ
i
which
determines if the intention for the word w
i
is drawn
from w
i−1
, or a new intention will be generated. In the
expectation step, for each user intention z, we need to
find the expected count of intention transitions to in-
tention z.
E(C
d,z
) =
|d|
∑
j=1
Pr(z
d, j
= z, ψ
d, j
= 1|w
1
, . . . , w
|d|
)
where d is a dialogue in the corpus of dialogue D.
Moreover, we need to find expected number of co-
occurrence of a word w with an intention z.
E(C
z,w
) =
|D|
∑
i=1
|d
i
|
∑
j=1
Pr(z
i, j
= z, w
i, j
= w|w
1
, . . . , w
|d|
)
In the Maximization step, the MAP (Maximum A
Posteriori) for θ and β is computed using Lagrange
multipliers:
θ
d,z
∝ E(C
d,z
) + α − 1
β
z,w
∝ E(C
z,w
) + η − 1
The random variable β
z,w
gives the probability of an
observation w given the intention z.
The parameter ε denotes the dependency of the sen-
tences on each other, i.e. how likely it is that two
LEARNING USER INTENTIONS IN SPOKEN DIALOGUE SYSTEMS
109
successive uttered sentence of the user have the same
intention.
ε =
∑
|D|
i=1
∑
|d|
j=1
Pr(ψ
i, j
= 1|w
1
, . . . , w
|d|
)
∑
|D|
i=1
N
i,sen
where N
i,sen
is the number of sentences in the dialogue
i.
In this method, EM is used for finding MAP es-
timate in hieratical generative model similar to LDA.
Griffiths and Steyvers (2004) argued that Gibbs sam-
pling is preferable than EM since EM can be trapped
in local minima. Ortiz and Kaelbling (1999) also ar-
gued that EM suffer from local minima. However,
they suggested methods for getting away from local
minima. Furthermore, they also proposed that EM
can be accelerated based on the type of the prob-
lem. In HTMM, the special form of the transition
matrix reduce the time complexity of the algorithm
to O(|d|N
2
), where |d| is the length of the dialogue d,
and N is the number of desired user intentions, given
to the algorithm. The small time complexity of the
algorithm enables the agent to apply it at any time to
update the observation functions based on her recent
observation.
3 EXPERIMENTS
We evaluated the performance of HTMM on SACTI
data set (Weilhammer et al., 2004). There are about
180 dialogues between 25 users and a wizard on this
corpus. The user’s sentences are first confused using
a speech recognition error simulator (Williams and
Young, 2004; Williams et al., 2005), and then are sent
to the wizard. However, the wizard’s response to user
is demonstrated on a screen in order to avoid speech
confusion from wizard to the user. The dialogue is
finished when the task is completed, or when the dia-
logue will last more than a limited time. This time is
often more than 10 minutes. We assume that the in-
tention transition is only possible from a sentence to
the following one in a given utterance, which is more
realistic than intention transition from a word to the
following one within a sentence. We did our exper-
iments on 95% dialogues with a vocabulary of 829
words, including some misspelled ones. On average,
each dialogue contains of 13 sentences.
In our experiments, we removed the agent’s re-
sponse from the dialogues in order to test the al-
gorithm only based on the noisy user utterances.
Moreover, since HTTM is an unsupervised learning
method, we did not have to annotate the dialogues, or
any sort of preprocessing. Table 2 shows the sample
Table 2: Sample dialogue from SACTI.
[Is there a good restaurant week an hour tonight]
[No I think late like uh museum price restaurant]
[Can you tell me the name]
[Thank you can you show me i’m there now where it is]
[Thank u]
[I would like a hour there museum first]
. . .
Table 3: Sample results of experiments on SACTI.
U1 Is there a good restaurant we can go to tonight
[Is there a good restaurant week an hour tonight]
I4:0.9815 I2:0.0103 I1:0.0080
S1 Would you like an expensive restaurant
U2 No I think we’d like a medium priced restaurant
[No I think late like uh museum price restaurant]
I4:0.8930 I9:0.1005 I6:0.0041 I2:0.0015 I5:0.0005 I1:0.0001
S2 Cheapest restaurant is eight pounds per person
U3 Can you tell me the name
[Can you tell me the name]
I4:0.9956 I3:0.0034 I8:0.0008
S3 bochka
S4 b o c h k a
U4 Thank you can you show me on the map where it is
[Thank you can you show me i’m there now where it is]
I1:0.9970 I4:0.0029
S5 It’s here
U5 Thank you
[Thank u]
I9:0.9854 I1:0.0114 I8:0.0013 I4:0.0007 I5:0.0006 I6:0.0003
U6 I would like to go to the museum first
[I would like a hour there museum first]
I9:0.9238 I6:0.0711 I5:0.0042 I2:0.0003 I7:0.0002
. . .
dialogue in Section 1, after removing the agent’s re-
sponds. As the table shows, this input data is quite
corrupted. The results of our experiments show that
the model is able to capture possible user intentions
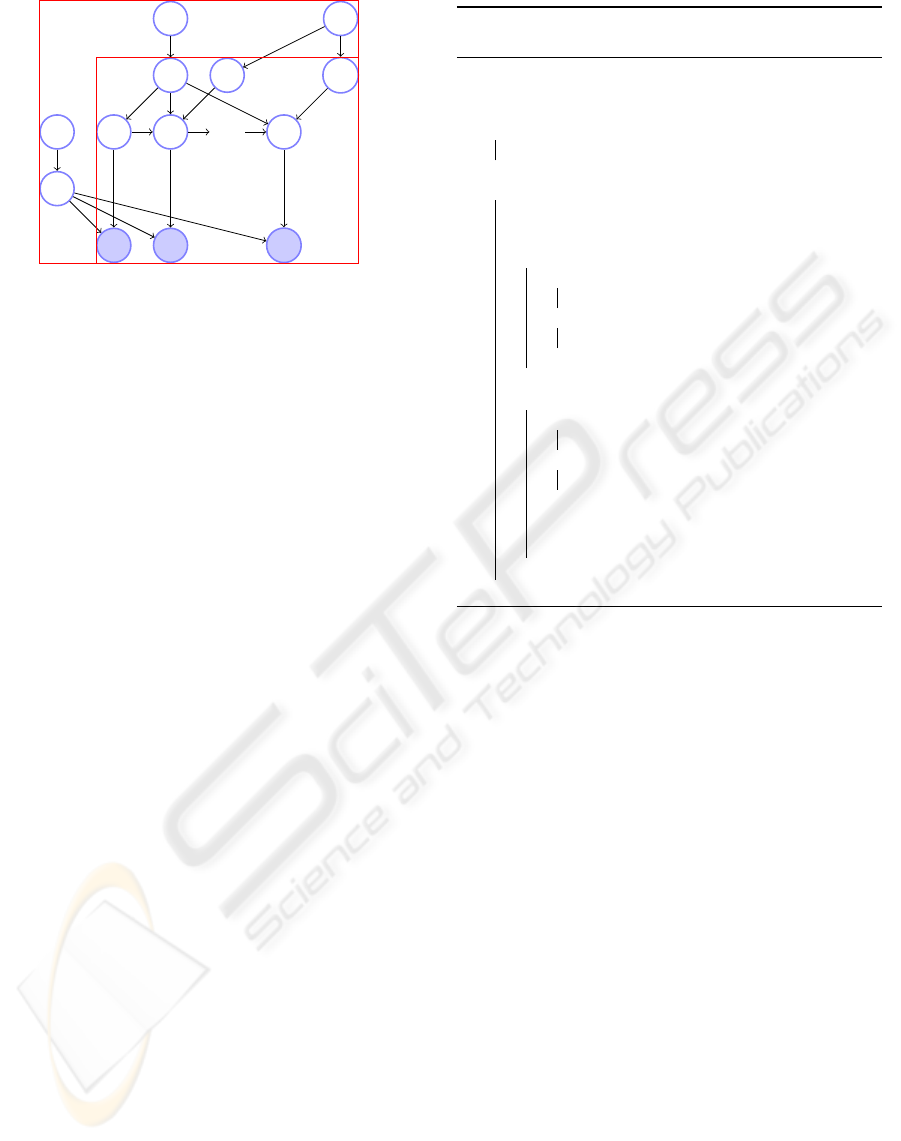
in the data set. Figure 3 shows 10 captured user in-
tentions and their top 10 words. For each intention,
we have highlighted the keywords which best distin-
guish the intention (the words which does not occur
in many intentions). As Figure shows, intention 0,
1, 2, 5, and 6 represents the user asking information
about tours, restaurants, hotels, museums, and bars,
respectively. Intention 7, represents the user asking
distance between two locations. Intentions 8 repre-
sents acknowledgement. Moreover, Intentions 3, 4,
and 9 can represent hotels, restaurants, and acknowl-
edgement, respectively. These three intentions have
been previously recognized by the model; however,
since the top words in each intention is slightly differ-
ent, the agent assigns it in two different categories.
Table 3 shows highest obtained intentions for each
sentence of the dialogue example in Section 1. As the
table shows, the highest intention for U1 is ask infor-
ICAART 2009 - International Conference on Agents and Artificial Intelligence
110
Intention 0
Intention 1
Intetion 2
Inteion 3
Intention 4
is 0.0599 is 0.0703 a 0.0620 the 0.0531 the 0.0653
the 0.0523 you 0.0403 i 0.0528 you 0.0446 you 0.0488
are 0.0498 where 0.0318 i'm 0.0330 can 0.0344 me 0.0443
where 0.0361 a 0.0315 for 0.0213 me 0.0311 a 0.0441
on 0.0275 there 0.0289 uh 0.0213 please 0.0268 is 0.0389
what 0.0189 e 0.0282 looking 0.0197 of 0.0235 of 0.0267
ah 0.0177
restaurant
0.0270
hotel
0.0196 is 0.0214
restaurant
0.0241
at 0.0175 me 0.0267 the 0.0177
hotel
0.0202 can 0.0238
tours
0.0167 uh 0.0264 to 0.0162 a 0.0192 could 0.0211
i 0.0166 can 0.0262 want 0.0147 and 0.0183 where 0.0174
Intention 5
Intention 6
Intention 7
Intention 8
Intention 9
the 0.0612 i 0.0752 how 0.0626 the 0.0351 i 0.0534
are 0.0373 a 0.0463 the 0.0495 a 0.0271
thank
0.0407
to 0.0259 the 0.0310 i 0.0379
ok
0.0265 u 0.0370
i'm 0.0235 to 0.0269
to
0.0360 you 0.0239 no 0.0319
in 0.0219 are 0.0261 it 0.0320 much 0.0217 you 0.0254
and 0.0210 no 0.0220
from
0.0304 i 0.0217 to 0.0221
um 0.0202 um 0.0202 a 0.0300 me 0.0195 think 0.0198
museum
0.0191 is 0.0170
much
0.0262 fine 0.0192 like 0.0181
at 0.0183
bar
0.0162 does 0.0240 to 0.0189 a 0.0170
a 0.0177 in 0.0161
long
0.0209 is 0.0172 er 0.0165
Figure 3: Captured Intentions by HTMM.
mation for restaurant, and with very small probabil-
ity ask information for hotel. Interestingly, we can
see that the obtained intention for U2 is I4, intention
for restaurants, though the utterance consists of the
word ”museum” a strong observation for I4. This fact
shows that the method is able to capture the Marko-
vian property in U1 and U2. Another interesting ob-
servation is in U3, where the agent could estimate the
user intention restaurants with 99% probability with-
out receiving the word restaurant as observation. Yet
another nice observation can be seen in the captured
intentions for U4 and U5. The sentences in U4 and
U5 contain ”thank you” as observations. However,
the captured intentions for U4 are I1 and I4, both of
which represent restaurants. On the other hand, in ut-
terance U5, the agent indeed is able to obtain intention
I9, acknowledgement.
Moreover, we measured the performance of the
model on the SACTI data set based on the definition
of perplexity. For a learned language model on a train
data set, perplexity can be considered as a measure of
on average how many different equally most proba-
ble words can follow any given word, so the lower the
perplexity the better the model. The perplexity of a
test dialogue d after observing the first k words can
be drawn using the following equation:
Perplexity = exp(−
log Pr(w
k+1
, . . . , w
|d|
|w
1
, . . . , w
k
)
|d| − k
)
To calculate the perplexity, we have:
Pr(w
k+1
, . . . , w
|d|
|w
1
, . . . , w
k
) =
∑
N
i
Pr(w
k+1
, . . . , w
|d|
|z
i
)Pr(z
i
|w
1
, . . . , w
k
)
where z
i
is a user intention in the set of N captured
user intentions from the train set. Given a user in-
tention z
i
, probability of observing w
k+1
, . . . , w
|d|
are
independent of each other, so we have:
Pr(w
k+1
, . . . , w
|d|
|w
1
, . . . , w
k
) =
∑
N
i
∏
|d|
j=k+1
Pr(w
j
|z
i
)Pr(z
i
|w
1
, . . . , w
k
)
To find out the perplexity, we learned the intentions
for each test dialogue d based on the first k observed
words in d, i.e. θ
new
= Pr(z
i
|w
1
, . . . , w
k
) is calculated
for each test dialogue. However, Pr(w
j
|z
i
) is drawn
using β, learned from the train dialogues.
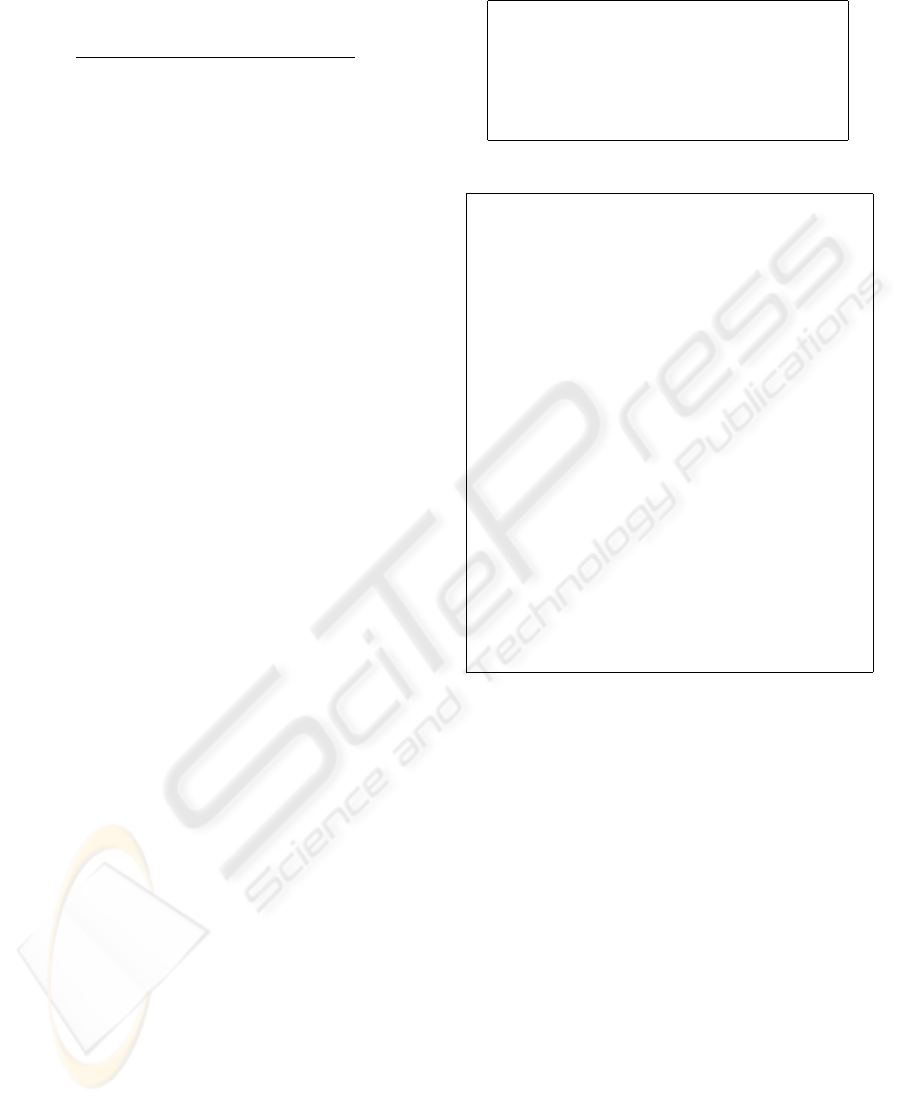
We calculated the perplexity for 5% of the dia-
logues in data set, using the 95% rest for training.
Figure 4 shows the average perplexity after observ-
ing the first k sentences of test dialogues (Remember
that each sentence of the dialogue consists of only one
user intention). As the figure shows, the perplexity re-
duce significantly by observing new sentences.
LEARNING USER INTENTIONS IN SPOKEN DIALOGUE SYSTEMS
111
−250
−200
−150
−100
−50
0
2 4 6 8 10 12
Perplexity
Observed sentences
Figure 4: Log likelihood for learning topics.
4 DISCUSSION
With the rise of spoken dialogue systems, the recent
literature devoted on more robust methods of dialogue
strategy design (Walker, 2000). Paek et al. (2006)
evaluated the Markov assumption for spoken dialogue
management. They argued that when there is not a
proper estimate of reward in each state of dialogue,
relaxing the Markovian assumption and estimating
the total reward, using some features of the domain,
could be more advantageous. Nevertheless, many re-
searchers have found MDP and POMDP frameworks
suitable for formulating a robust dialogue agent in
spoken dialogue systems. In particular, Levin et al.
(1997) learned dialogue strategies within the Markov
Decision Process framework.
Pietquin and Dutoit (2006) used MDPs to model
a dialogue agent. They interpreted the observation
mostly in the speech level and based on the defini-
tion of perplexity. Williams and Young (2007) used
POMDPs for modeling a dialogue agent and defined
the observation function based on some features of
the recognition system. However, these features are
usually difficult to be determined and task dependent.
We are particularly interested in the POMDP dialogue
agent in (Doshi and Roy, 2007). The authors learned
the observation function in a POMDP using Dirich-
let distribution for the uncertainty in observation and
transition parameters. However, for each state they
consider only one keyword as observation.
In this work, we learned the observation model
based on the received noisy data in the word level, and
abstract away the speech recognition features. The
used method consider all the words in a sentence as
observations which represent one state. This is cru-
cial for the frameworks such as POMDPs where the
agent use an observation function to reason about the
state of the system, and that the state of the system
−88000
−87500
−87000
−86500
−86000
−85500
−85000
−84500
5 10 15 20 25 30 35 40
Loglikelihood
Iterations
Figure 5: Log likelihood for learning topics.
is the user intention. Based on our experiments on
relatively small data set SACTI, we believe that this
method can be used in the early design stage of prac-
tical dialogue agents, say in (Doshi and Roy, 2007),
in order to define the possible states of the domain
(possible user intentions), as well as observation func-
tion. Moreover, the result shows that HTMM is able
to capture a robust observation model for practical ap-
plications with large number of observations such as
(Atrash and Pineau, 2006). Moreover, since HTMM
use EM algorithm, this method is quite fast, and can
be used by the agent at any time to learn new obser-
vations and update the observation function. Figure
5 shows the log likelihood of data for 50 iterations of
the algorithm. For the given observations, the likeli-
hood is computed by averaging over possible states:
loglikelihood =
|D|
∑
i=1
|d
i
|
∑
j=1
log
N
∑
t=1
Pr(w
i, j
= w|z
i, j
= z
t
)
As the figure shows the algorithm converges after
about 30 iterations which is an evidence for small
time expense of the algorithm. This fact suggests use
of the algorithm after finishing some tasks by agent to
learn new states, observations, and hopefully a better
policy.
The interesting property about HTMM includes
in its combining LDA and HMM. On the one hand,
LDA captures mixture of intentions for dialogues, and
on the other hand, HMM adds the Markovian prop-
erty. This makes the framework similar to POMDPs
in terms of making a belief over possible states, be-
sides the Markovian property. As Table 3 shows, the
possible captured intentions for each sentence of the
user can be seen as the agent’s belief over possible
states. Moreover, using this method, we learned the
value of ε = 0.71 on SACTI data set; which suggests
that it is likely that the user changes his intention in
ICAART 2009 - International Conference on Agents and Artificial Intelligence
112
Figure 6: Smart Wheeler Platform.
a dialogue in SACTI data data set; whereas for in-
stance Doshi and Roy (2007) assumes that the user
may change his intention with a predefined low prob-
ability in wheelchair domain.
HTMM, however, assumes that the Dirichlet prior
are known. During our experiments on SACTI, we
observed that by feeding the Algorithm 1 with differ-
ent α and η, the algorithm can derive slightly different
intentions. However, some of these intentions makes
sense, for instance intentions for cost, dialogue ini-
tiation, etc. Moreover, the number of intentions (N
in Algorithm 1) need to be set. For instance, in our
experiments we set N = 10 to be able to derive the
maximum number of intentions, yet some intentions
seem to be similar.
5 CONCLUSIONS AND FUTURE
WORKS
Although we did not perform any quantitative com-
parison, our early observations on SACTI data set is
promising. We observed that HTMM can be used for
capturing possible user intentions in dialogues. The
captured intentions together with the learned obser-
vation function could be used in design stage of a
POMDP based dialogue agent. Moreover, the dia-
logue agent can use HTMM on the captured dialogues
over time to update the observation function. Al-
though, there is no notion of actions in HTMM, and
it is a method which is used mostly on static data, the
similarity of HTMM and POMDP in terms of Marko-
vian property and generating a belief over possible
states suggest considering both these two models in
practical applications, where the time complexity of
POMDPs burden the problem. Moreover, our obser-
vation on SACTI data set suggests future works for
use of HTMM for automatically annotating the cor-
pus of dialogues, capturing the structure of dialogues,
and evaluation of dialogue agents (Walker and Pas-
z
1
w
1
a
m1
z
2
w
2
...
a
m2
ψ
2
z
|d|
w
|d|
a
m|d|
ψ
|d|
β
η
θ
α
ε
d
D
Figure 7: The extended HTMM. The intention of user de-
pends on both her words w
i
s and system actions a
mi
s.
sonneau, 2001; Walker et al., 1997; Singh et al., 2000;
Walker et al., 2001).
In the future work we are going to use HTMM
to learn the model for a POMDP dialogue agent.
For instance, we would like to use HTMM for a
a wheelchair robot similar to Figure 6, taken from
(Pineau and Atrash, 2007). This wheelchair is de-
signed for patients with limited skills, say patients
suffering from Multiple Sclerosis. The patients can
direct the robot, with mentioning the goal, the path,
and restrictions such as speed, instead of using a joy-
stick.
We are going to augment HTMM by considering
actions of the system in the model. Since the actions
performed by the agent carries much less noise com-
paring to the user utterance (agent’s observations),
agent’s action can have more effect on the Markovian
property of the environment. That is, the intention
of user depends on both her words and agent actions.
Figure 7 shows HTMM augmented with system ac-
tions. We are going to apply augmented model on the
captured dialogues for a dialogue POMDP agent and
compare the agent’s learned strategy with that of sim-
ilar models.
ACKNOWLEDGEMENTS
This work has been supported by a FQRNT grant.
REFERENCES
Atrash, A. and Pineau, J. (2006). Efficient planning and
tracking in pomdps with large observation spaces. In
AAAI-06 Workshop on Empirical and Statistical Ap-
proaches for Spoken Dialogue Systems.
LEARNING USER INTENTIONS IN SPOKEN DIALOGUE SYSTEMS
113

Blei, D. M. and Moreno, P. J. (2001). Topic segmentation
with an aspect hidden Markov model. In Proceedings of
the 24th annual international ACM SIGIR conference on
Research and development in information retrieval (SI-
GIR ’01), pages 343–348.
Church, K. W. (1988). A stochastic parts program and noun
phrase parser for unrestricted text. In Proceedings of the
second conference on Applied Natural Language Pro-
cessing (ANLP ’88), pages 136–143, Morristown, NJ,
USA.
Doshi, F. and Roy, N. (2007). Efficient model learning for
dialog management. In Proceedings of the ACM/IEEE
international conference on Human-Robot Interaction
(HRI ’07), pages 65–72.
Griffiths, T. and Steyvers, J. (2004). Finding scientific top-
ics. Proceedings of the National Academy of Science,
101:5228–5235.
Gruber, A., Rosen-Zvi, M., and Weiss, Y. (2007). Hid-
den Topic Markov Models. In Artificial Intelligence and
Statistics (AISTATS ’07), San Juan, Puerto Rico.
Hofmann, T. (1999). Probabilistic latent semantic analysis.
In Proceedings of the fifteenth conference on Uncertainty
in Artificial Intelligence (UAI ’99), pages 289–296.
Levin, E., Pieraccini, R., and Eckert, W. (1997). Learning
dialogue strategies within the Markov decision process
framework. 1997 IEEE Workshop on Automatic Speech
Recognition and Understanding, pages 72–79.
Ortiz, L. E. and Kaelbling, L. P. (1999). Accelerating
EM: An empirical study. In Proceedings of the fifteenth
conference on Uncertainty in Artificial Intelligence (UAI
’99), pages 512–521, Stockholm, Sweden.
Paek, Tim, Chickering, and David (2006). Evaluating the
Markov assumption in Markov Decision Processes for
spoken dialogue management. Language Resources and
Evaluation, 40(1):47–66.
Pietquin, O. and Dutoit, T. (2006). A probabilistic frame-
work for dialog simulation and optimal strategy learn-
ing. IEEE Transactions on Audio, Speech, and Language
Processing, 14(2):589–599.
Pineau, J. and Atrash, A. (2007). Smartwheeler: A
robotic wheelchair test-bed for investigating new models
of human-robot interaction. In AAAI Spring Symposium
on Multidisciplinary Collaboration for Socially Assistive
Robotics.
Rabiner, L. R. (1990). A tutorial on hidden Markov models
and selected applications in speech recognition. pages
267–296.
Singh, S. P., Kearns, M. J., Litman, D. J., and Walker, M. A.
(2000). Empirical evaluation of a reinforcement learning
spoken dialogue system. In Proceedings of the Seven-
teenth National Conference on Artificial Intelligence and
Twelfth Conference on Innovative Applications of Artifi-
cial Intelligence, pages 645–651. AAAI Press / The MIT
Press.
Walker, M. and Passonneau, R. (2001). DATE: a dialogue
act tagging scheme for evaluation of spoken dialogue
systems. In Proceedings of the first international con-
ference on Human Language Rechnology research (HLT
’01), pages 1–8, Morristown, NJ, USA. Association for
Computational Linguistics.
Walker, M. A. (2000). An application of reinforcement
learning to dialogue strategy selection in a spoken dia-
logue system for email. Journal of Artificial Intelligence
Research (JAIR), 12:387–416.
Walker, M. A., Litman, D. J., Kamm, A. A., and Abella,
A. (1997). PARADISE: A Framework for Evaluating
Spoken Dialogue Agents. In Proceedings of the Thirty-
Fifth Annual Meeting of the Association for Computa-
tional Linguistics and Eighth Conference of the Euro-
pean Chapter of the Association for Computational Lin-
guistics, pages 271–280, Somerset, New Jersey. Associ-
ation for Computational Linguistics.
Walker, M. A., Passonneau, R. J., and Boland, J. E. (2001).
Quantitative and qualitative evaluation of darpa commu-
nicator spoken dialogue systems. In Meeting of the Asso-
ciation for Computational Linguistics, pages 515–522.
Weilhammer, K., Williams, J. D., and Young, S. (2004). The
SACTI-2 Corpus: Guide for Research Users, Cambridge
University. Technical report.
Williams, J. D., Poupart, P., and Young, S. (2005). Fac-
tored partially observable markov decision processes for
dialogue management. In The 4th IJCAI Workshop on
Knowledge and Reasoning in Practical Dialogue Sys-
tems, Edinburgh, Scotland.
Williams, J. D. and Young, S. (2004). Characterizing task-
oriented dialog using a simulated asr channel. In Pro-
ceedings of International Conference on Spoken Lan-
guage Processing (ICSLP ’04), Jeju, South Korea.
Williams, J. D. and Young, S. (2007). Partially observable
markov decision processes for spoken dialog systems.
Computer Speech and Language, 21:393–422.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
114
