
AGENT APPROACH TO SITUATION ASSESSMENT
Giuseppe Paolo Settembre, Daniele Nardi
Department of Computer and System Science, Sapienza University, Rome, Italy
Roberta Pigliacampo
SESM s.c.a.r.l. - a Finmeccanica company, Via Tiburtina km 12.4, Rome, Italy
Keywords:
Knowledge Representation and Reasoning, Industrial Application of AI.
Abstract:
The Situation Assessment process is evolving from signal-analysis based centralized models to high-level
reasoning based net-centric models, according to new paradigms of information fusion proposed by recent
research.
In this paper we propose a knowledge-based approach to Situation Assessment, and we apply it to maritime
surveillance. A symbolic model of the world is given to an agent based framework, that use Description
Logics based automatic reasoning to devise on estimate of the situation. The described approach potentially
allows distributed Situation Assessment through agent collaboration. The goal is to support the understanding
of the situation by relying on automatic interpretation processes, in order to provide the human operators with
a synthetic vision, pointing out which are the elements on the scenario that require human intervention.
The success of high level reasoning techniques is shown through experiments in a real maritime scenario, in
which our approach is compared to the performances of human operators which monitor the situation without
any support of an automatic reasoning system.
1 INTRODUCTION
Data Fusion is the basis for a huge industrial research
field (e.g. signal processing and sensor fusion) whose
aim is to develop techniques for security related sys-
tems.
According to 1999 revision of JDL Data Fusion
Model and its recent reformulations (Llinas et al.,
2004), the purpose of the third level of information
fusion (Situation Assessment) is “estimation and pre-
diction of relations among entities, to include force
structure and cross force relations, communications
and perceptual influences, physical context, etc.”; it is
also pointed out that understanding and predicting re-
lations among entities within a scenario have become
critical issues in surveillance activities. In fact, the
quality of information provided by low level analysis
(level 1 and 2) does not suffice anymore the applica-
tions’ requirements, due to the increasing complexity
of the scenarios and the high operators’ workload.
The success of new technologies and standards
for formal knowledge representation offers the mo-
tivation to explore new approaches in order to pro-
vide effective solutions to Situation Assessment. In
our approach, we consider Situation Assessment as
the problem of extracting the best explanations of the
extensional knowledge of each agent, through situa-
tion classification, providing meaningful aggregated
information, to improve situation comprehension and
support decision making activities.
The approach described by this paper includes
the following innovative aspects. (1) It partially
fills the lacking of a formal definition of the Situa-
tion Assessment process. In our formalization, the
new standards of reasoning techniques (e.g. OWL,
http://www.w3.org/TR/owl-guide/), and the evolution
to distributed paradigms are taken into account. (2)
It provides an algorithm to perform Situation Assess-
ment with a single agent, with a solution which is suit-
able for an evolution to multi-agent contexts.
The proposed approach allows a synergy between
autonomous and standard human analysis, since the
extraction of a high level description of the evolving
situation helps operators to focus only on few poten-
tially relevant elements of the global scenario. This is
coherent with the situation awareness theory (Endsley
and Garland, 2000), and with cognitive experiments
(Giompapa et al., 2006).
287
Settembre G., Nardi D. and Pigliacampo R. (2009).
AGENT APPROACH TO SITUATION ASSESSMENT.
In Proceedings of the International Conference on Agents and Artificial Intelligence, pages 287-290
DOI: 10.5220/0001664302870290
Copyright
c
SciTePress

In order to show the advantages of our approach to
perform Situation Assessment, we made experiments
in a real world seacoast scenario. We modeled some
complex relationships which are monitored in a pro-
tected area, comparing the agent-based system’s per-
formances to the human operators’ ones, in collabo-
ration with a company working on radar surveillance.
2 PROBLEM FORMALIZATION
We considered a certain number of objects V =
{v
1
, ..., v
n
} moving in the scenario each with a private
goal, and a set of agents A
1
, ..., A
m
. Each agent has a
world model, has perceptions, communicates with the
others, and takes part pro-actively in the classification
process. The intensional knowledge is shared among
all the agents, and constitutes a common language for
communication.
We define an event (perception)e
i
as a logical con-
dition, which is the output of a feature extraction pro-
cess, based on the observations of the environment. A
situation at a certain time t
i
is commonly defined as
the state of all the observed variables in the world at
time t
i
and in the past (at time t
j
, j ∈ {0, ..., i − 1}).
However, this definition doesn’t suit in the scope of
Situation Assessment, because such a process does
not aims at considering all the variables in the sce-
nario, but instead at estimating the state of subsets of
these variables, in order to extract a few number of
relevant elements. Hence we consider the set of the
relevant situation classes Σ = {S
1
, . . . , S
n
}, in which
S
i
is a class of situations, significant with respect to
the context. Basically, each relevant situation class
represents a group of semantically equivalent circum-
stances of the world.
We say that s
i
∈ S
j
(s
i
is an instance of S
j
, where
S
j
≡ f(e
1
, . . . , e
n
)), if ∃e
1
, . . . , e
n
s.t. f(e
1
, . . . , e
n
) =
true, where f(e
1
, . . . , e
n
) is a logical definition in
a given formalism. From the point of view of
the agent’s knowledge, with K
p
(s
i
∈ S
j
) we indi-
cate that an agent A
p
knows that s
i
∈ S
j
, where
S
j
≡ f(e
1
, . . . , e
n
). This happens iff ∃e
1
, . . . , e
n
∈
KB
p
s.t. f(e
1
, . . . , e
n
) = true, where KB
p
is the
knowledge base of that agent. A situation class
S
i
≡ f(e
p
1
, ..., e
p
n
) is more specific than S
j
≡
g(e
q
1
, ..., e
q
m
), indicated with S
i
⊆ S
j
, iff every in-
stance of S
i
is also an instance of S
j
.
We can now proceed in providing a formal defini-
tion of the Situation Assessment process.
Definition 1. We say that s
i
is classified as S
i
by an
agent A
p
iff K
p
(s
i
∈ S
i
) and ∄S
j
s.t. K
p
(s
i
∈ S
j
)∧S
j
⊆
S
i
. We indicate with c
p
(KB
p
, s
i
) = S
i
that the agent
A
p
, given its knowledge base KB
p
and a situation in-
Figure 1: Organization of components of Situation Assess-
ment (UML inspired by (Matheus et al., 2003)).
stance s
i
, classifies s
i
as S
i
.
Definition 2. We say that a classification c
p
(KB, s
i
) =
S
i
is correct if s
i
∈ S
i
.
Definition 3. We define Situation Assessment (SA) the
classification of all the instances s
i
. SA is correct
iff ∀s
i
, c
p
(KB, s
i
) = S
i
is correct. SA is complete if
∀s
i
∈ S
i
, c
p
(KB, s
i
) = S
i
.
The relation occurring among the elements of the
Situation Assessment process is illustrated in Fig.1.
By classifying the significant situations as instances
of the Relevant Situation concepts that are represented
into a taxonomy of situations (see Sec.3), and thus
using the Description Logics (DL) inference capabil-
ities, we did not need to use any rule propagation en-
gine (which would not be supported by reasoners).
3 SITUATION CLASSIFICATION
We modeled the agent’s knowledge us-
ing ontologies formalized in OWL DL
(http://www.w3.org/TR/owl-features), through
the editor Proteg´e (http://protege.stanford.edu), while
inference was performed through the RacerPro
reasoner (http://www.racer-systems.com). In our
approach, each agent is provided with two ontologies,
the domain ontology and the situation ontology. The
first is a content ontology (see (Llinas et al., 2004)),
while the second is a process ontology.
The “domain” Ontology. The domain ontol-
ogy is the symbolic representation of the elements
of the world, which have to be extracted from the
scenario and organized in a taxonomic structure.
Once the intensional knowledge (concepts,
relations) has been defined, the ontology is popu-
lated using data extracted from its own information
sources, or provided by other agents. The main issues
about the population of the ontology (building of
the so-called ABOX) tipically concern the mapping
from numeric data into their symbolic representation
(e.g., map coordinates into regions). This is solved at
ICAART 2009 - International Conference on Agents and Artificial Intelligence
288

sub-symbolic level, through specific procedures.
The “situation” Ontology. Once the domain
ontology has been populated, we can use our knowl-
edge on the scenario to identify the set of Relevant
Situation classes (see Sec.2), and organize them in
a second taxonomy. Each relevant situation class is
defined with constraints expressed in DL formalism,
using the terms (concepts, relations) included into
the domain ontology. Note that these definitions are
not rules expressed in an external formalism, but
DL defined concepts (rules are not included in the
system).
At this point, we are able to use automatic reasoning
and DL capabilities (Nardi and Brachman, 2003)
on the available knowledge to classify the current
situations instances. Now, the assessment of the
situation is simply the most specific classification of
each situation instance among the relevant situation
classes.
From the point of view of the extensional knowledge,
we must address carefully the creation of the correct
number of situation instances. We decided to have
as many situation instances as many independent
circumstances are present in the world, and examine
them separately. In this way, different aspects of
the same global situation are perceived as different
instances. Moreover, separating independent situa-
tion instances gives us a substantial advantage when
we would start dialogues among different agents to
compare their classifications.
Defining the right number of situation instances is
not easy to solve. For example, if we would declare
different situation instances for each location of
the environment, then we would not be able catch
those relationships (situation classes) which are
aggregation of events in different locations. The
solution we propose consists in identifying a subset
E of event classes which trigger the generation of
a new situation instance. When a new event e
i
∈ E
is detected, a new situation instance s
i
is created, is
declared as being a member of the generic Situation
class, and it is connected through a relation (hasOb-
ject in Fig.1) with the event e
i
. Whenever events are
detected and for agent p verify the definition of a
certain situation class S, s
i
is classified as member of
S, and K
p
(s
i
∈ S) holds.
4 VALIDATION IN A HARBOUR
SURVEILLANCE SCENARIO
Experiments have been performed on a middle size
italian harbour, in which an average of 80 vessels
Figure 2: A splitting situation. Two boats (red circles) per-
formed a splitting close to a surveilled area (red arc) and
one of them is directed to the critical point (in purple).
(military or civil) were moving at the same time with
different goals. A radar was able to perceive on a
10km x 10km area.
We considered 2 suspect operations to be detected:
Splitting: it is the manoeuver of remaining hidden
staying close to another vessel, then suddenly move
away directed to a critical area (see Fig.2).
Suspect Approach: it is verified if a suspect vessel
is approached by other vessels. A suspect vessel is a
vessel whose identification is not known, which stays
near the border of a surveilled zone.
We compared the performances of human opera-
tors, provided with 5 different support systems. Every
test session had a lenght of about 15 minutes.
In the first configuration, that we will call Agent
Support, we provided the operator with the agent
based system which performs autonomous Situation
Assessment as described in this paper. The situa-
tion Splitting is defined by the constraint “classify as
member, if and only if current situation contains a
track, which was first detected close to a zone bor-
der and close to another vehicle, and either one or the
other vehicle approaches a critical area”, expressed
with the DL formalism.
Whenever a vehicle v
1
is detected as appear-
ing close to another vehicle v
2
, a new situation in-
stance s
v
1
is created, and it is populated the relation
hasObject(s
v
1
, v
1
). When the other properties which
are in the definition are verified, s
v
1
will be classified
as splitting. A similar constraint is used for the class
suspect approach.
The 4 other configurations are:
No Support: the operator is provided with the out-
put of a multi-tracking system, with no elaboration to
support Situation Assessment.
Still Tracks Visualization: the system provides an
additional information, visualizing the still vehicles
with a different colour.
Story Vis: the system graphically shows also the tra-
jectory, average and current speed.
1/3 Tracks: the same as the previous policy, but the
AGENT APPROACH TO SITUATION ASSESSMENT
289
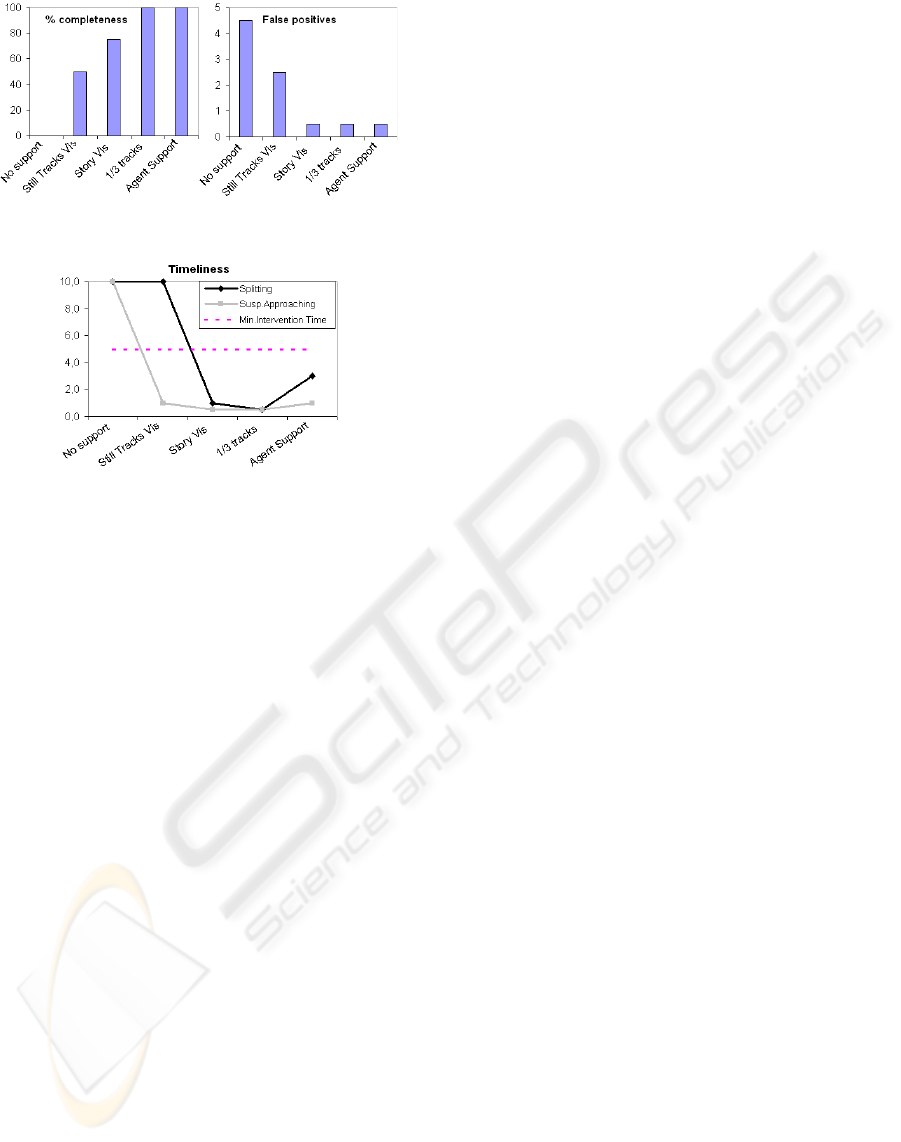
Figure 3: Comparison of completeness and correctness of
Situation Assessment within 5 different configurations.
Figure 4: Comparison of timeliness of Situation Assess-
ment within 5 different configurations.
number of tracks in the scenario is reduced to 1/3.
First, we measured the completeness of the ap-
proach, in terms of how many correct (splitting or
suspect approach) situations have been detected by
operators (Fig.3a). In Fig.3b, the correctness of the
approach is measured, in terms of the average num-
ber of incorrect detections of splitting and suspect ap-
proach situations (false positives). Both graphs show
that the “Agent support” configuration performs sim-
ilarly to the one in which operators are watching over
only 1/3 of the real everyday amount of traffic. In
the first 2 configurations, humans’ conclusions were
completely unreliable.
Notice that the high absolute value of the shown
results is biased by the unusually high (1) probability
of the presence of anomalies during the test session,
(2) attention level of the human operator.
Finally, we measured the timeliness with which
the situations are revealed. In Fig.4, we show how
long it took human operators to detect the presence
of the malicious situations. The minimal intervention
time threshold is the maximum available time to allow
a prompt intervention. From the graph, it is shown
that operators with few system support will not reveal
the situations in time, even in our ideal setting. Notice
also that the agent based reasoning can take more time
to detect a situation: this happens because the agent
will detect a certain situation only when all the events
of a specific symbolic definition have been verified,
while the operator conclusions are much more guided
by an intelligent or skilled observation. A less strict
definition would cause more prompt detections, but
higher number of false positives.
5 DISCUSSION
In this paper we introduced a new model to approach
Situation Assessment, based on agent knowledge rea-
soning. We validated our approach with experiments
performed with real data in a maritime surveillance
scenario.
With respect to state of art knowledge based ap-
proaches (Matheus et al., 2003), we succeed in avoid-
ing the use of rules, which are not supported by cur-
rent state-of-art reasoners. The main limit of our ap-
proach is that situations are defined using true-false
membership of individuals to properties, therefore in-
formation uncertainty can be only partially included
into the model.
Finally, it is valuable that the described approach
potentially allows distributed Situation Assessment,
which is a current study of different communities
((Llinas et al., 2004),(Mastrogiovanni et al., 2007)).
REFERENCES
Endsley, M. and Garland, D. (2000). Situation Awareness:
Analysis and Measurement. Lawrence Erlbaum Asso-
ciates, Mahway, New Jersey.
Giompapa, S., Farina, A., et al. (2006). A model for a hu-
man decision-maker in a command and control radar
system: Surveillance tracking of multiple targets. In
Proc. of 9th Int. Conf. on Information Fusion.
Llinas, J., Bowman, C., et al. (2004). Revisiting the jdl
data fusion model ii. In Proc. of 7th Int. Conf. on
Information Fusion.
Mastrogiovanni, F., Sgorbissa, A., and Zaccaria, R. (2007).
A distributed architecture for symbolic data fusion. In
Proc. of 20th Int.Joint Conf. on Artificial Intelligence,
IJCAI-07, pages 2153–2158.
Matheus, C. J., Baclawski, K., and Kokar, M. M. (2003).
Derivation of ontological relations using formal meth-
ods in a situation awareness scenario. In Proc. of
SPIE Conference on Multi-sensor, Multi-source Infor-
mation Fusion, Orlando.
Nardi, D. and Brachman, R. J. (2003). An introduction to
description logics. In The DL Handbook: Theory, Im-
plem. and Applications. Cambridge University Press.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
290
